Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
FISICA APPLICATA Prof. Renato Magli
Dipartimento di Chimica, Biochimica e Biotecnologie per la Medicina Università degli Studi di Milano Corso Integrato per Igienista Dentale a.a

2
Per chiarimenti ed approfondimenti:
Tel:

3
Struttura del corso Argomenti propedeutici (elementi di trigonometria, i vettori e le loro proprieta’). Elementi di Meccanica del punto materiale e dei sistemi di punti materiali. Elementi di Termodinamica. Elementi di Elettromagnetismo. Cenni su: ultrasuoni e tecnica ecografica, raggi X e tecnica radiografica.

4
Cinematica del punto materiale
Punto materiale (particella): - corpo di dimensioni trascurabili rispetto a quelle tipiche dello spazio in cui puo’ muoversi e/o degli altri corpi con cui interagisce; - precisione con cui siamo in grado di determinarne la posizione. Esempi: - auto in autostrada deserta - auto in parcheggio affollato
: - corpo di dimensioni trascurabili rispetto a quelle tipiche dello spazio in cui puo’ muoversi e/o degli altri corpi con cui interagisce; - precisione con cui siamo in grado di determinarne la posizione. Esempi: - auto in autostrada deserta. - auto in parcheggio affollato.")
5
Sistema di Riferimento (s.r.) e Sistema di coordinate
Esempi z P (x,y,z) coordinate cartesiane r P O y x z P (r,,) P coordinate polari O r x y 0 colatitudine (distanza zenitale) 02 longitudine (azimut) H x = r sin cos y = r sin sin z = r cos
 coordinate. cartesiane. r. P. O. y. x. z. P (r,,) P. coordinate. polari. O. r. x. y. 0 colatitudine (distanza. zenitale) 02 longitudine (azimut) H. x = r sin cos y = r sin sin z = r cos")
6
x(t) equazione oraria di P
Moto rettilineo O P x(t) equazione oraria di P x x(t) x2 – x x velocita’ media vm: vm = = t2 – t t t1 t2 O x x1 x2 x dx velocita’ istantanea v : v = lim = t t dt
 equazione oraria di P. x. x(t) x2 – x1 x. velocita’ media vm: vm = = t2 – t1 t. t1. t2. O. x. x1. x2. x dx. velocita’ istantanea v : v = lim = t0 t dt.")
7
Il segno della velocita’ indica il verso del moto sull’asse x:
se e’ positivo il moto e’ verso le x positive, se e’ negativo il moto e’ verso le x negative.

8
Perche’ introdurre il concetto di velocita’ istantanea?
X(t) x1 x2 t t1 t2 Esaminiamo il moto nell’intervallo di tempo compreso tra t1 e t2: in tale intervallo l’ascissa x parte dal valore x1 per discendere fino ad un minimo, risalire fino ad un massimo, scendere e rimanere per un certo periodo pressocche’ costante (il punto P si e’ cioe’ fermato) fino a scendere di nuovo per raggiungere il valore x2: il punto P si e’ quindi mosso con velocita’ variabile.
 x1. x2. t. t1. t2. Esaminiamo il moto nell’intervallo di tempo compreso tra t1 e t2: in tale intervallo l’ascissa x parte dal valore x1 per discendere fino ad un minimo, risalire fino ad un massimo, scendere e rimanere per un certo periodo pressocche’ costante (il punto P si e’ cioe’ fermato) fino a scendere di nuovo per raggiungere il valore x2: il punto P si e’ quindi mosso con velocita’ variabile.")
9
Per uno studio accurato di queste situazioni e’ quindi necessario restringere il piu’ possibile la dimensione della finestra temporale t = (t2 – t1) nella quale eseguiamo le osservazioni. Ecco quindi la necessita’ di considerare il lim t 0

10
Caso particolare: Moto Rettilineo Uniforme
v = costante (in modulo, direz. e verso) vmedia = vistantanea v = (x-x0) / (t-t0) v v O t t0 t x = x0 + v (t-t0)
 vmedia = vistantanea. v = (x-x0) / (t-t0) v. v. O. t. t0. t. x = x0 + v (t-t0) ")
11
x Scegliendo t0 = 0: x = x0 + v·t x0 t O a) V e’ il coefficiente angolare della retta rappresentata dalla funzione x = x(t) b) Lo spazio (x-x0) percorso nel tempo (t-t0) e’ pari all’area racchiusa sotto la curva v = v(t) tra t0 e t (vedi area tratteggiata nella figura della diapositiva precedente)
 b) Lo spazio (x-x0) percorso nel tempo (t-t0) e’ pari all’area. racchiusa sotto la curva v = v(t) tra t0 e t (vedi area tratteggiata. nella figura della diapositiva precedente)")
12
Moto vario Nel caso in cui la velocita’ vari nel tempo (v ≠ cost) abbiamo un’ accelerazione: v – vo v amedia = = t - t t v aistantanea = lim t0 t v t O

13
Caso particolare: moto rettilineo uniformemente accelerato
a = cost am = ai = a v = v0 + a (t – t0) e scegliendo t0 = 0: v = v0 + a t
 e scegliendo t0 = 0: v = v0 + a t.")
14
m · s-1 (metro al secondo)
RIASSUMENDO: Spostamento s [s] = L Unità di misura (S.I.): m (metro) Velocità v s vm = t s ds vi = lim = t0 t dt [v] = L T-1 Unita’ di misura (S.I.): m · s (metro al secondo)
: m (metro) Velocità v. s. vm = t. s ds. vi = lim = t0 t dt. [v] = L T-1. Unita’ di misura (S.I.): m · s-1 (metro al secondo)")
15
Accelerazione v am = t v dv ai = lim = t0 t dt [a] = L T-2 Unita’ di misura (S.I.): m · s (metro al secondo quadrato)
: m · s-2 (metro al secondo quadrato)")
16
Velocita’ angolare P1 s d = lim = lim s / R t t0 = ds / R = v dt / R P2 O = d / dt = v / R velocita’ angolare (modulo) [] = [v / R ] = L T-1 L-1 = T-1
 [] = [v / R ] = L T-1 L-1 = T-1.")
17
Principi della Dinamica Classica
Principio di relatività (Galileo, Poincarè, Einstein) Il moto assoluto di un sistema di riferimento inerziale (che cioè non interagisca col resto del mondo) non puo’ essere rivelato mediante alcun esperimento
 Il moto assoluto di un sistema di riferimento inerziale (che cioè. non interagisca col resto del mondo) non puo’ essere rivelato. mediante alcun esperimento.")
18
* Uso di particolari accorgimenti e dispositivi per lo studio
del moto dei corpi (ad es.: piano inclinato) * Esperienza fondamentale realizzata da Galileo: A B B’ B’’ h C La tendenza di un corpo NON è di raggiungere lo stato di quiete (come affermato da Aristotele) ma di mantenere invariato il proprio stato di moto
 * Esperienza fondamentale realizzata da Galileo: A. B. B’ B’’ h. C. La tendenza di un corpo NON è di raggiungere lo stato di. quiete (come affermato da Aristotele) ma di mantenere. invariato il proprio stato di moto.")
19
Prima legge di Newton (principio di inerzia)
Un corpo qualunque che, osservato da un s.r. inerziale, risulti non soggetto a forze (cioè non interagisca col mondo circostante), o è in quiete o si muove con velocità costante (con modulo, direzione e verso costanti) cioè con moto rettilineo uniforme.
, o è in quiete o si muove con. velocità costante (con modulo, direzione e verso costanti) cioè con moto rettilineo uniforme.")
20
* Seconda legge di Newton
* La massa inerziale * Seconda legge di Newton Una massa m sulla quale agisce una forza F si muove, rispetto ad un s.r. inerziale, di moto accelerato, la cui equazione (ad m costante) e’: F = m a [massa] = M [Forza] = M·L·T-2 Unita’ di Misura (S.I.): massa kg forza kg · m / s2 = N = Newton
 e’: F = m a. [massa] = M [Forza] = M·L·T-2. Unita’ di Misura (S.I.): massa kg. forza kg · m / s2 = N = Newton.")
21
· · Esempi di Forze Forza gravitazionale FG Forza attrattiva m2
| FG | = G m1 m2 / (r12)2 m2 r12 m1 N.B. Massa inerziale e Massa gravitazionale
2. m2. r12. m1. N.B. Massa inerziale e Massa gravitazionale.")
22
Applicando il 2° principio, per esempio alla massa m1:
FG = m1 a1 e considerando solo i moduli: G m1 m2 / (r12)2 = m1 a1 a1 = G m2 / (r12) accelerazione cui e’ soggetto m1 a causa della presenza di m2 posto a distanza r12
2 = m1 a1. a1 = G m2 / (r12)2 accelerazione cui e’ soggetto. m1 a causa della presenza di. m2 posto a distanza r12.")
23
Nel caso in cui m2 sia la Terra ed m1 un corpo sulla superficie
terrestre, si ha che: r12 rT costante (possiamo, in prima approssimazione, considerare sferica la forma della Terra). Inserendo i valori corrispondenti alla massa ed al raggio della Terra, si ottiene per l’accelerazione di una massa in prossimita’ della superficie terrestre: g = 9.8 m/s2 accelerazione di gravita’
. Inserendo i valori corrispondenti alla massa ed al raggio. della Terra, si ottiene per l’accelerazione di una massa. in prossimita’ della superficie terrestre: g = 9.8 m/s2. accelerazione di gravita’")
24
(cariche di segno opposto) (cariche di ugual segno)
Forza elettrica FE - q + q - Q - Q r12 r12 r12 + Q + q Forza attrattiva (cariche di segno opposto) Forza repulsiva (cariche di ugual segno) |F12| = k qQ / (r12)2 Sono di natura elettrica: le forze di attrito le forze di coesione
 Forza repulsiva. (cariche di ugual segno) |F12| = k qQ / (r12)2. Sono di natura elettrica: le forze di attrito. le forze di coesione.")
25
Forza elastica Deformabilita’ dei corpi Resistenza offerta dai corpi alla loro deformazione Consideriamo un corpo di lunghezza a riposo “x”; applichiamo una forza che lo deformi e sia x la deformazione subita: Felastica - k · x Legge di Hooke Esempio: la bilancia

26
Moto su traiettoria curvilinea e Forza centripeta
Per percorrere con velocita’ v una traiettoria curvilinea di raggio r la massa m deve essere assogettata ad un’accelerazione: a = v2 / r diretta verso il centro della traiettoria (centro del cerchio che meglio approssima la traiettoria punto per punto). Deve percio’ esistere una forza di intensita’ pari a: m a = m v2 / r diretta verso il centro che rappresenta la traiettoria nel punto considerato. La forza deve percio’ avere carattere centripeto
. Deve percio’ esistere una forza di intensita’ pari a: m a = m v2 / r. diretta verso il centro che rappresenta la traiettoria nel punto. considerato. La forza deve percio’ avere carattere centripeto.")
27
Osservazione importante:
la forza centripeta NON e’ un nuovo tipo di forza; quando si parla di forza centripeta si intendono caratterizzare la direzione, il verso e l’intensita’ della forza necessaria a che il moto si realizzi; deve essere chiaro che con tal nome non si vuol caratterizzarne l’ origine, che sara’ naturalmente dovuta ad una delle forze fondamentali.

28
Esempi di forze centripete
Nella struttura atomica gli elettroni “orbitano” attorno ai nuclei; la forza centripeta necessaria (in tale descrizione approssimata di origine classica) e’ fornita dall’ attrazione elettrica tra elettroni (negativi) e protoni (positivi). Moto dei pianeti attorno al sole (e dei satelliti attorno al proprio pianeta): la forza centripeta e’ data dall’ attrazione gravitazionale Terra - Satellite geostazionario msat v2/R = G mT msat / R2 R = G mT/v2 km R Orbita satellite rT
 e’ fornita dall’ attrazione. elettrica tra elettroni (negativi) e protoni (positivi). Moto dei pianeti attorno al sole (e dei satelliti attorno al proprio. pianeta): la forza centripeta e’ data dall’ attrazione gravitazionale. Terra. - Satellite geostazionario. msat v2/R = G mT msat / R2. R = G mT/v2 km. R. Orbita. satellite. rT.")
29
Forza Peso, Forza Gravitazionale e Forza centrifuga
Osservazione su: Forza Peso, Forza Gravitazionale e Forza centrifuga Se la Terra fosse una sfera costituita da tanti gusci concentrici (e’ una buona approssimazione) e fosse ferma: m1 a = g F1 = m1 g Forza peso agente su m1 Fg RT b) Ma la Terra NON e’ ferma; ha molti movimenti ed in particolare ruota su se stessa. Questo fa si’ che ogni massa solidale con essa subisca un’ accelerazione centrifuga che la spinge verso l’esterno della traiettoria circolare percorsa m1 Fc Ftot = Fg + Fc Ftot Fg La forza peso agente su m1 (e misurata per es. da una bilancia) e’ la risultante Ftot
 e fosse ferma: m1. a = g F1 = m1 g. Forza peso agente. su m1. Fg. RT. b) Ma la Terra NON e’ ferma; ha molti movimenti ed in particolare ruota su. se stessa. Questo fa si’ che ogni massa solidale con essa subisca un’ accelerazione centrifuga che la spinge verso l’esterno della traiettoria circolare. percorsa. m1. Fc. Ftot = Fg + Fc. Ftot. Fg. La forza peso agente su m1 (e misurata per es. da una bilancia) e’ la risultante Ftot.")
30
le due forze hanno ugual modulo, ugual retta di applicazione e verso
Terza legge di Newton L’esperienza mostra che, nel caso in cui due corpi A e B interagiscano tra loro, se su A agisce una forza FA, anche B e’ assogettato ad una forza FB: le due forze hanno ugual modulo, ugual retta di applicazione e verso opposto: FA = - FB Il principio e’ valido anche in situazioni di equilibrio. N.B. Azione (FA) e reazione (FB) sono applicati a corpi diversi: L’effetto globale NON e’ nullo Esempi: vari casi di trazione
 e reazione (FB) sono applicati a corpi diversi: L’effetto globale NON e’ nullo. Esempi: vari casi di trazione.")
31
M(o) = b x F Momento di una forza (rispetto ad un punto) •
H M(o) = b x F • O A b M = b · sin · F Condizioni per l’equilibrio di un corpo ∑ Fi = assenza di traslazioni ∑ Mi = assenza di rotazioni
 = b x F. • O. A. b. M = b · sin · F. Condizioni per l’equilibrio di un corpo. ∑ Fi = 0 assenza di traslazioni. ∑ Mi = 0 assenza di rotazioni.")
32
LEVE primo genere: il fulcro e’ tra la forza motrice e la resistenza (vantaggiosa o svantaggiosa) secondo genere: la resistenza e’ tra il fulcro e la forza motrice (sempre vantaggiosa) terzo genere: la forza motrice e’ tra il fulcro e la potenza (sempre svantaggiosa) Fm R O Fm R O R Fm O
 terzo genere: la forza motrice e’ tra il fulcro e la. potenza. (sempre svantaggiosa) Fm. R. O. Fm. R. O. R. Fm. O.")
33
all’asse passante per O, equivale alla “compensazione” tra i due
OA = a OB = b m M • A O B La condizione di equilibrio rotazionale, cioè assenza di rotazioni attorno all’asse passante per O, equivale alla “compensazione” tra i due momenti torcenti: (mg) a = (Mg) b
 a = (Mg) b.")
34
Leva 1º genere pinze remi

35
Leva 1° genere

36
schiaccianoci Leva 2º genere Leva 3º genere Molle per carbone

37
Leva 3° genere

38
Come spiegare l’origine di tale forza?
Piegandosi per sollevare un peso viene esercitata una forza molto grande sul disco lombosacrale che separa l’ultima vertebra dall’osso sacro che sostiene la colonna vertebrale. L’indebolimento di questo disco può causargli lesioni e/o deformazioni, provocando pressione sui nervi vicini e quindi un dolore che può risultare anche molto intenso. Come spiegare l’origine di tale forza?

39
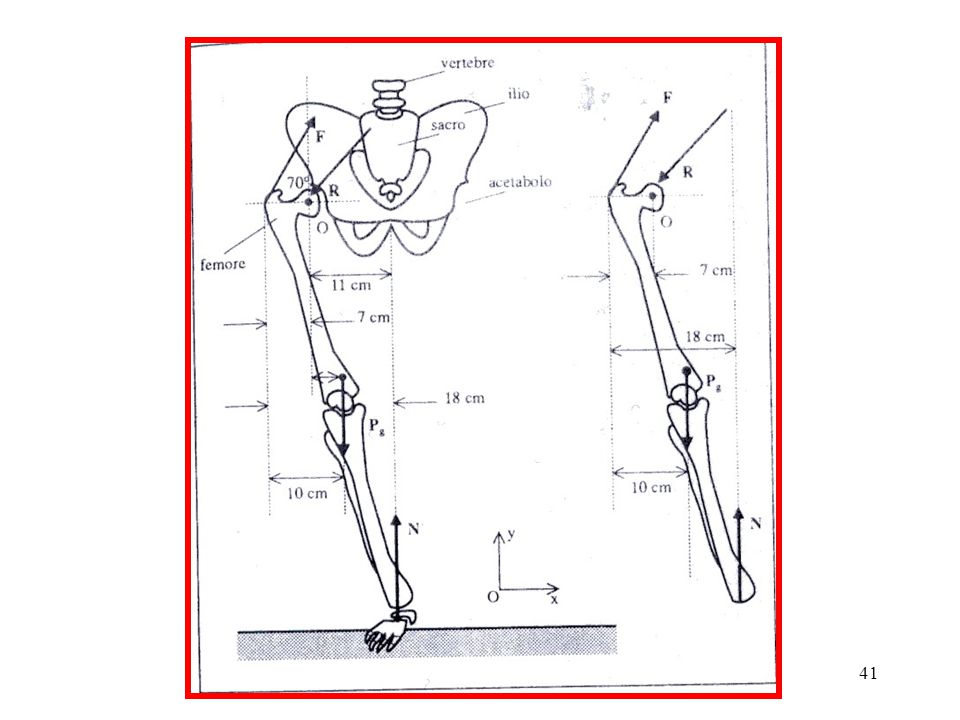
C Schematizziamo la colonna vertebrale
ed i muscoli della schiena come una leva con il fulcro O centrato sull’ ultimo disco intervertebrale. La potenza F è la forza risultante pro- dotta dai muscoli per equilibrare la resistenza costituita dal peso P del tronco, della testa e delle braccia (circa il 65% del peso totale del corpo) e dal peso dell’oggetto che si vuol sollevare: si può pensare che la risultante di tali pesi sia applicata al centro di massa C. C La forza F agisce lungo una retta d’azione poco inclinata rispetto al piano orizzontale: il braccio a di tale forza è perciò molto più piccolo del braccio b della forza peso P. L’equilibrio dei momenti agenti viene pertanto assicurato con una forza F di intensità corrispondentemente molto maggiore dell’intensità della forza peso. Ciò è vero anche se ci si piega senza sollevare nessun peso: in tal caso la forza esercitata dai muscoli della schiena è circa tre volte maggiore del peso corporeo. E’ di conseguenza molto grande la componente orizzontale della forza F, che è la forza che sollecita direttamente la parte terminale della colonna vertebrale.
 e dal. peso dell’oggetto che si vuol sollevare: si può pensare che la risultante di tali. pesi sia applicata al centro di massa C. C. La forza F agisce lungo una retta d’azione poco inclinata rispetto al piano orizzontale: il. braccio a di tale forza è perciò molto più piccolo del braccio b della forza peso P. L’equilibrio dei momenti agenti viene pertanto assicurato con una forza F di intensità. corrispondentemente molto maggiore dell’intensità della forza peso. Ciò è vero anche se ci si piega senza sollevare nessun peso: in tal caso la forza esercitata. dai muscoli della schiena è circa tre volte maggiore del peso corporeo. E’ di conseguenza molto grande la componente orizzontale della forza F, che è la forza che. sollecita direttamente la parte terminale della colonna vertebrale.")
40
il momento resistente da equilibrare.
Le considerazioni precedenti ci portano a concludere che, dovendo sollevare un peso, per evitare di sottoporre la colonna vertebrale a grandi sollecitazioni, è opportuno scegliere la configurazione (b) flettendo le ginocchia e tenendo il tronco pressocché verticale, in modo che il fulcro O sia a piccola distanza dalle rette d’azione delle forze peso e sia quindi più piccolo (rispetto alla posizione (a)) il momento resistente da equilibrare.
 flettendo le ginocchia e tenendo il tronco. pressocché verticale, in modo che il fulcro O sia a piccola distanza dalle rette. d’azione delle forze peso e sia quindi più piccolo (rispetto alla posizione (a)) il momento resistente da equilibrare.")
42
All’equilibrio Fm(a) bm(a) =Fr br Fm(b) bm(b) =Fr br
 bm(a) =Fr br Fm(b) bm(b) =Fr br")
43
Le Forze di attrito Sono dovute ad Interazioni Elettromagnetiche molto
complesse correlate con la forma e la natura chimica dei corpi coinvolti. Per semplicità, e tenendo conto dei risultati empirici, i processi che, attraverso tali interazioni elettromagnetiche, alterano i fenomeni che si stanno studiando, vengono schematizzati con l’intervento di una forza di attrito.

44
Attrito radente N = - mg F AS Risultato sperimentale: mg
Il massimo valore che la forza di attrito statico puo’ assumere e’ proporzionale alla componente normale N della forza di contatto µS = coefficiente di attrito statico (NON dipende dall’estensione della superficie di appoggio ma dalla NATURA dei corpi a contatto) AS µS N
 AS µS N.")
45
dinamico: questa forza e’, in modulo, quella necessaria a mantenere
Per F > As = µS N il corpo si mette in moto, ostacolato dall’attrito dinamico: questa forza e’, in modulo, quella necessaria a mantenere il moto del corpo con v = cost mentre striscia sul piano; la direzione e’ quella della velocita’ ed il verso e’ opposto al moto. Ad µd N µd = coefficiente di attrito dinamico (praticamente indipendente dalla velocita’ e dall’estensione della superficie di contatto; dipende dalla NATURA dei materiali in contatto) In genere, a parita’ di condizioni: µd 4/5 µs
 In genere, a parita’ di condizioni: µd 4/5 µs.")
46
Attrito volvente Attrito viscoso
Resistenza al rotolamento di un cilindro (o una sfera) su un piano Attrito viscoso viscosita’ corpo in movimento in un fluido: si manifesta una forza resistiva, opposta al verso del moto e, per velocita’ non elevate, proporzionale alla velocita’: Fvis = - β v β dipende dalle dimensioni e dalla forma del corpo e dalla natura del fluido
 su un piano. Attrito viscoso. viscosita’ corpo in movimento in un fluido: si manifesta una forza. resistiva, opposta al verso del moto e, per velocita’ non elevate, proporzionale alla velocita’: Fvis = - β v. β dipende dalle dimensioni e dalla forma del corpo e dalla. natura del fluido.")
47
Per es.: sfera di raggio R in fluido con viscosita’ η:
η = η(T) : - aumenta all’aumentare di T nei gas (dipende dagli urti tra le molecole) - diminuisce all’aumentare di T nei liquidi (dipende dalle forze di coesione tra le molecole) [η] = F T L kg/m s
 : - aumenta all’aumentare di T nei. gas (dipende dagli urti tra le molecole) - diminuisce all’aumentare di T nei liquidi (dipende dalle forze di coesione tra. le molecole) [η] = F T L-2 kg/m s.")
48
Lavoro ed Energia Fi B m αi si Linea l A Suddivido il percorso da A a B in N spostamenti si , con i = 1,…, N: Li = Fi · si = Fi si cosαi NB: se Fi e si sono perpendicolari (Fi si): αi = π/2 cos αi = 0 Li = 0
: αi = π/2 cos αi = 0 Li = 0.")
49
In generale il lavoro dipende dal percorso seguito
Il lavoro totale e’ dato da: LABlinea l = i=1…N (Fi · si)linea l = i=1…N (Fi si cosαi)linea l In generale il lavoro dipende dal percorso seguito [L] = [F S] = M L T-2 L = M L2 T-2 Nel S. I.: N m = Joule (J)
linea l = i=1…N (Fi si cosαi)linea l. In generale il lavoro dipende dal percorso seguito. [L] = [F S] = M L T-2 L = M L2 T-2. Nel S. I.: N m = Joule (J)")
50
Lavoro della Forza Peso mg = - mg k si = xi i + zi k z B l si si
LAbl = ( mg · si)l = - mg ( k · si)l = - mg [ k · (xi i+ zi k)]l = - mg ( zi )l Il lavoro della forza peso NON dipende dal cammino seguito dalla massa per spostarsi da A a B, ma solo dalla differenza di quota tra A e B LAbl = - mg (zB – zA) = mg zA – mg zB
l = - mg ( k · si)l. = - mg [ k · (xi i+ zi k)]l. = - mg ( zi )l. Il lavoro della forza peso NON dipende dal cammino seguito dalla massa per spostarsi da A a B, ma solo dalla differenza di quota tra A e B. LAbl = - mg (zB – zA) = mg zA – mg zB.")
51
Le forze che – come visto per la forza peso – producono un lavoro
Energia Potenziale Le forze che – come visto per la forza peso – producono un lavoro INDIPENDENTE dal cammino seguito per spostarsi da A a B e dipendente solo dalla posizione iniziale A e da quella finale B sono dette FORZE CONSERVATIVE. Per esse e’ possibile quindi definire una funzione della posizione U(r) detta funzione energia potenziale tale che: LAB = U(A) – U(B) Nel caso della forza peso: U(r) = mgz + cost In modo che: LAB = mgzA – mgzB = U(A) – U(B)
 detta funzione energia potenziale tale che: LAB = U(A) – U(B) Nel caso della forza peso: U(r) = mgz + cost. In modo che: LAB = mgzA – mgzB = U(A) – U(B)")
52
Energia Cinetica Ec = ½ m v2 energia cinetica della massa m che si muove con velocita’ v E’ possibile dimostrare il seguente risultato: Teorema dell’Energia Cinetica (valido SEMPRE) LAB = Ec(B) – Ec(A) Ovvero: LAB = ½ m vB2 – ½ m vA2
 LAB = Ec(B) – Ec(A) Ovvero: LAB = ½ m vB2 – ½ m vA2.")
53
Principio di conservazione dell’ ENERGIA MECCANICA
In presenza di Forze Conservative, mettendo insieme la definizione di Energia Potenziale ed il Teorema dell ‘Energia Cinetica, si ottiene: Forze conservative LAB = EC(B) – EC(A) = U(A) – U(B) U(A) + EC(A) = U(B) + EC(B) = E La somma dell’energia cinetica e dell’energia potenziale (cioè l’ ENERGIA MECCANICA) è indipendente dal tempo, è cioè costante
 – EC(A) = U(A) – U(B) U(A) + EC(A) = U(B) + EC(B) = E. La somma dell’energia cinetica e dell’energia potenziale. (cioè l’ ENERGIA MECCANICA) è indipendente dal tempo, è cioè costante.")
54
La forza dissipativa (attrito) rappresenta perciò
Se sono presenti anche Forze NON CONSERVATIVE (per esempio attriti): (LAB)tot = (LAB)cons + (LAB)non cons U(A) + EC(A) = U(B) + EC(B) – (LAB)non cons La forza dissipativa (attrito) rappresenta perciò un meccanismo attraverso il quale l’energia si deteriora, ovvero si dissipa.
: (LAB)tot = (LAB)cons + (LAB)non cons. U(A) + EC(A) = U(B) + EC(B) – (LAB)non cons. La forza dissipativa (attrito) rappresenta perciò. un meccanismo attraverso il quale l’energia. si deteriora, ovvero si dissipa.")
55
TERMODINAMICA Temperatura e Termometro
CALDO - FREDDO : giudizio soggettivo Per dare un carattere OBIETTIVO a tale sensazione è necessario individuare una qualche grandezza fisica che esprima una proprietà macroscopica del corpo e che dipenda in modo univoco dal suo stato termico Per esempio: Volume, pressione, resistenza elettrica,…

56
OSSERVAZIONI SPERIMENTALI
Due corpi dello stesso materiale che producano la stessa sensazione termica nell’osservatore sono detti in EQUILIBRIO TERMICO. Il contatto tra due corpi inizialmente in diversi stati termici produce, dopo un tempo opportuno, l’equilibrio termico tra i due corpi: lo stato finale è intermedio rispetto ai due stati iniziali. L’equilibrio termico gode della proprietà TRANSITIVA: A in equilibrio con B e B in equilibrio con C A e C sono in equilibrio termico tra loro.

57
Come si misura la temperatura?
Si sceglie una sostanza termometrica chimicamente definita (mercurio, alcool, toluene, elio, rame, ecc.) e la si pone in un opportuno contenitore Si sceglie una grandezza G adatta a descrivere una qualche proprietà della sostanza termometrica (ad es: lunghezza colonnina di mercurio o di alcool, pressione del gas, resistenza elettrica del filo di rame, ecc.) Si ipotizza la validità della relazione di proporzionalità: T = a • G con la costante a determinata fissando convenzionalmente il valore della temperatura in corrispondenza di un particolare stato termico di riferimento ben riproducibile (punto fisso).
 e la si pone in un opportuno contenitore. Si sceglie una grandezza G adatta a descrivere una qualche proprietà della. sostanza termometrica (ad es: lunghezza colonnina di mercurio o di alcool, pressione del gas, resistenza elettrica del filo di rame, ecc.) Si ipotizza la validità della relazione di proporzionalità: T = a • G. con la costante a determinata fissando convenzionalmente il valore della. temperatura in corrispondenza di un particolare stato termico di riferimento. ben riproducibile (punto fisso).")
58
La Conferenza Internazionale di Pesi e Misure (Parigi 1954) ha stabilito:
Punto fisso campione stato termico corrispondente al punto triplo dell’acqua in cui ghiaccio, vapore ed acqua coesistono in equilibrio. T0 = K (gradi Kelvin) La temperatura di EBOLLIZIONE dell’acqua alla pressione di 1 atm è, in tale scala: Tebol = K mentre la temperatura del ghiaccio fondente, sempre ad 1 atm, è: Tfond = K
 La temperatura di EBOLLIZIONE dell’acqua alla pressione di 1 atm è, in tale scala: Tebol = K. mentre la temperatura del ghiaccio fondente, sempre ad 1 atm, è: Tfond = K.")
59
tfond = 0 ºC E’ spesso conveniente usare la SCALA CENTIGRADA CELSIUS
definita da: tC = (TK – ) ºC tebol = 100 ºC tfond = 0 ºC
 ºC. tebol = 100 ºC. tfond = 0 ºC.")
60
Equilibrio Termodinamico
In un sistema ISOLATO (che cioè non può scambiare né massa né energia con l’ambiente circostante), dopo un tempo sufficientemente lungo tutte le variabili di stato (ad es.: massa, volume, ecc.) assumono valori costanti nel tempo e (se possono variare localmente, ad es.: temperatura, pressione) uniformi in ogni punto del sistema Stato di EQUILIBRIO TERMODINAMICO Sistema APERTO: interagisce con l’esterno scambiando materia ed energia Sistema CHIUSO: interagisce con l’esterno scambiando energia ma NON massa
, dopo un tempo sufficientemente lungo tutte le variabili di stato. (ad es.: massa, volume, ecc.) assumono valori costanti nel tempo e (se possono. variare localmente, ad es.: temperatura, pressione) uniformi in ogni punto del sistema. Stato di EQUILIBRIO TERMODINAMICO. Sistema APERTO: interagisce con l’esterno scambiando materia ed energia. Sistema CHIUSO: interagisce con l’esterno scambiando energia ma NON massa.")
61
< Energia cinetica > = 3/2 N kB T
Significato microscopico della Temperatura Sistema materiale costituito da N atomi < Energia cinetica > = 3/2 N kB T La temperatura di un sistema materiale è associabile all’Energia Cinetica media posseduta dagli atomi di tale sistema.

62
con V0 volume alla temperatura di 0°C coefficiente di dilatazione
Dilatazione Termica Di norma il volume di un corpo, qualunque sia lo stato di aggregazione, aumenta, a pressione costante, al crescere dell’energia molecolare media e, quindi, della temperatura: DILATAZIONE TERMICA Per sostanze che seguono tale comportamento, in vicinanza dello 0°C, la dipendenza del volume dalla temperatura può essere ben rappresentata da: V = V0 (1+t) con V0 volume alla temperatura di 0°C coefficiente di dilatazione t temperatura in gradi Celsius
 con V0 volume alla temperatura di 0°C. coefficiente di dilatazione. t temperatura in gradi Celsius.")
63
L’acqua (insieme a poche altre sostanze) ha un
comportamento anomalo: per alcuni valori della temperatura presenta un coefficiente di dilatazione negativo Il fenomeno è connesso col comportamento anomalo della densità dell’acqua intorno alla temperatura di 4°C. A partire da 0°C un aumento della temperatura ha come conseguenza una contrazione di volume ( < 0) ed un aumento della densità, che raggiunge il massimo valore a 4 °C. Al di sopra di tale temperatura un ulteriore aumento della temperatura produce un incremento di volume ( > 0) ed una diminuzione di densità.
 ed un aumento della densità, che raggiunge il massimo. valore a 4 °C. Al di sopra di tale temperatura un ulteriore. aumento della temperatura produce un incremento. di volume ( > 0) ed una diminuzione di densità.")
64
Modalità per lo scambio di ENERGIA
Sperimentalmente si osserva che lo scambio di Energia avviene: Attraverso l’azione di Forze che inducono un moto ORDINATO delle particelle costituenti il sistema Trasferimento coerente Lavoro meccanico b) Attraverso una differenza di temperatura Energia Termica Calore
 Attraverso una differenza di temperatura. Energia Termica. Calore.")
65
Unità di misura del CALORE
Essendo una forma di energia, l’unità di misura nel S.I. è il Joule Sono spesso utilizzate altre unità di misura, quali la caloria e la chilocaloria La caloria (cal) è la quantità di calore che bisogna fornire ad 1 g di acqua alla pressione di 1 atm per innalzarne la temperatura da 14.5 °C a 15.5 °C. Mille volte più grande è la chilocaloria (Cal oppure kcal): quantità di calore necessaria per innalzare da 14.5 °C a 15.5 °C la temperatura di 1 kg di acqua.
 è la quantità di calore che bisogna fornire ad 1 g di acqua alla. pressione di 1 atm per innalzarne la temperatura da 14.5 °C a 15.5 °C. Mille volte più grande è la chilocaloria (Cal oppure kcal): quantità di calore necessaria per innalzare da 14.5 °C a 15.5 °C. la temperatura di 1 kg di acqua.")
66
Tasso metabolico (approssimato) per una persona di 65 kg
Attività Tasso metabolico kcal/h watt = J/s =============================================== Dormire Stare seduti Attività leggera (mangiare, vestirsi) Correre (v = 15 km/h)
 Correre (v = 15 km/h)")
67
Per una persona normale di 70 kg Pb è di circa 1700 kcal / giorno
POTENZA METABOLICA Potenza metabolica basale (o metabolismo basale) Pb di un organismo umano: È il consumo energetico minimo dell’organismo riferito all’unità di tempo; è quindi determinato dall’entità dei processi ossidativi in condizioni basali (digiuno completo, riposo fisico e mentale). In tali condizioni il consumo di energia è necessario per i processi di termoregolazione, per il mantenimento del tono muscolare e delle funzioni cardiaca, respiratoria, ghiandolare e nervosa. Per un individuo sano: Pb 40 kcal / ora per m2 di superf. corporea o, equivalentemente: Pb 1.2 Watt per kg di massa corporea Per una persona normale di 70 kg Pb è di circa 1700 kcal / giorno
 Pb di un organismo umano: È il consumo energetico minimo dell’organismo riferito all’unità di tempo; è quindi. determinato dall’entità dei processi ossidativi in condizioni basali (digiuno completo, riposo fisico e mentale). In tali condizioni il consumo di energia è necessario per i. processi di termoregolazione, per il mantenimento del tono muscolare e delle. funzioni cardiaca, respiratoria, ghiandolare e nervosa. Per un individuo sano: Pb 40 kcal / ora per m2 di superf. corporea. o, equivalentemente: Pb 1.2 Watt per kg di massa corporea. Per una persona normale di 70 kg. Pb è di circa 1700 kcal / giorno.")
68
Per un individuo che non sia a riposo e a digiuno è necessario considerare
anche la potenza metabolica addizionale Pa, cioè il consumo di energia, riferito all’unità di tempo, legato al lavoro muscolare, al lavoro mentale, ai processi digestivi ed alle accresciute attività cardiaca, respiratoria, ghiandolare e nervosa. La potenza metabolica totale è la somma di Pb e Pa e viene compensata dall’ assunzione degli alimenti. Carboidrati e proteine 4.1 kcal / g Grassi 9.3 kcal / g Persona adulta di 70 kg con attività normale: Pb + Pa 2500 kcal / 24 ore con intensa attività fisica: Pb + Pa 4000 kcal / 24 ore L’efficienza di trasformazione dell’energia chimica degli alimenti in energia Meccanica legata all’attività fisica svolta è piuttosto bassa (10-20 %)
")
69
Usis = Q - L IL PRIMO PRINCIPIO
Abbiamo già visto che una trasformazione con scambio di energia può avvenire con scambio sia di lavoro che di calore. Definendo: Usis = energia interna = Energia cinetica + Energia potenziale si osserva che la variazione di energia interna del sistema è: 1° Principio della Termodinamica Usis = Q - L Q = calore con: Q > 0 se assorbito dal sistema Q < 0 se ceduto dal sistema L = lavoro scambiato con: L > 0 se eseguito sull’ambiente esterno L < 0 se eseguito dall’ambiente esterno

70
Principio di conservazione dell’energia
D’altra parte: Q – L = - Uamb Usis = - Uamb Usis + Uamb = costante Principio di conservazione dell’energia

71
= Lottenuto / Qfornito
Macchine termiche Convertono calore in lavoro, ovvero moto caotico (cioè energia termica) in moto ordinato. Tale conversione deve essere realizzata in modo efficiente, cioè massimizzando il rendimento : = Lottenuto / Qfornito
 in moto ordinato. Tale conversione deve essere realizzata in modo efficiente, cioè massimizzando il rendimento : = Lottenuto / Qfornito.")
72
Sperimentalmente non si è mai
riusciti a realizzare una macchina termica che riesca a tradurre INTEGRALMENTE in lavoro tutto il calore assorbito (come permesso dal 1° Principio); ogni macchina reale cede SEMPRE una parte del calore assorbito trasferendolo ad un corpo a temperatura inferiore a quella a cui lo ha assorbito.
; ogni macchina reale cede SEMPRE una parte del calore. assorbito trasferendolo ad un corpo a temperatura. inferiore a quella a cui lo ha assorbito.")
73
IL SECONDO PRINCIPIO Sono stati proposti vari modi, tra loro equivalenti, di enunciare alcuni risultati sperimentali Kelvin-Planck E’ impossibile realizzare una trasformazione il cui UNICO risultato sia il trasformare in lavoro il calore estratto da una sorgente a temperatura uniforme. Clausius E’ impossibile realizzare una trasformazione il cui UNICO risultato sia un passaggio di calore da un corpo ad una data temperatura ad un altro a temperatura maggiore.

74
ELETTROMAGNETISMO Elementi di Struttura della Materia
Atomo: Al centro: Nucleo costituito da Protoni (carica positiva) e Neutroni (carica neutra) Attorno al nucleo: Nuvola elettronica contenente gli Elettroni (carica negativa) Tra queste particelle (tutta la materia è costituita da protoni, neutroni ed elettroni) si manifestano delle FORZE ELETTRICHE (oltre che gravitazionali)
 e. Neutroni (carica neutra) Attorno al nucleo: Nuvola elettronica contenente gli Elettroni. (carica negativa) Tra queste particelle (tutta la materia è costituita da protoni, neutroni ed. elettroni) si manifestano delle FORZE ELETTRICHE (oltre che. gravitazionali)")
75
(cariche di segno opposto) (cariche di ugual segno)
Forza elettrica FE - q + q - Q - Q r12 r12 r12 + Q + q Forza attrattiva (cariche di segno opposto) Forza repulsiva (cariche di ugual segno) |F12| = k qQ / (r12)2 Sono di natura elettrica: le forze di attrito le forze di coesione
 Forza repulsiva. (cariche di ugual segno) |F12| = k qQ / (r12)2. Sono di natura elettrica: le forze di attrito. le forze di coesione.")
76
Campo Elettrico E (r) = F / q
Una ragionevole misura della “perturbazione” introdotta nello spazio circostante dalla presenza di una carica elettrica Q può essere ottenuta dividendo la forza che tale carica esercita sulla carica SONDA q per tale carica stessa; si ottiene in tal modo la definizione di CAMPO ELETTRICO E: E (r) = F / q Attenzione: la carica sonda q deve essere la piu’ piccola possibile, per alterare al minimo il campo che si vuol misurare
 = F / q. Attenzione: la carica sonda q. deve essere la piu’ piccola possibile, per. alterare al minimo il campo che si vuol. misurare.")
77
Conservatività del Campo Elettrico Statico
Si può dimostrare che la forza elettrica agente tra cariche in condizioni statiche è CONSERVATIVA ; ciò comporta che il lavoro fatto da tale forza per spostare una carica da una posizione A ad una posizione B non dipende dal percorso seguito, ma solo da A e B. Questa proprietà ci permette di introdurre il potenziale elettrico V(x) mediante il quale il lavoro elettrico LAB necessario per spostare la carica q da A a B può essere scritto: LAB = q V(A) – q V(B)
 mediante il quale il lavoro elettrico LAB. necessario per spostare la carica q da A a B può essere scritto: LAB = q V(A) – q V(B)")
78
Effetto di un campo Elettrico su una carica
Forza concorde con E se q > 0 Forza discorde con E se q < 0 F = q E Applicando la seconda legge di Newton F = m a deduciamo che una carica q, sotto l’azione di un campo elettrico E, acquista un’accelerazione a data da: a = q E / m Attenzione al segno di q !!! Le caratteristiche dell’accelerazione, e quindi del moto, dipendono perciò da E; se per esempio E è costante nel tempo, tale sarà anche l’accelerazione, ecc.

79
CORRENTE ELETTRICA Gli elettroni liberi (ovvero: i portatori di carica presenti) posseggono un moto termico caotico La presenza di un campo elettrico E fa acquistare a tutti i portatori di carica una velocità di deriva lungo la direzione di E A causa di tale velocità di deriva c’è uno spostamento coerente di carica elettrica, c’è quindi una CORRENTE ELETTRICA i: i = q / t Unità di misura nel S. I.: Ampere

80
i = (VA – VB) / R Legge di Ohm RESISTENZA ELETTRICA del conduttore
In tutti i casi di conduzione elettrica (tranne che per la superconduttività) il moto dei portatori di carica è ostacolato dal mezzo in cui avviene il moto RESISTENZA ELETTRICA del conduttore La corrente elettrica è causata dalla presenza di un campo elettrico Un campo elettrico è associato ad una differenza di potenziale E’ possibile esprimere il legame esistente, nei conduttori metallici, tra corrente elettrica e differenza di potenziale esistente tra gli estremi del conduttore in cui circola la corrente i: i = (VA – VB) / R Legge di Ohm
 il moto dei portatori di carica. è ostacolato dal mezzo in cui avviene il moto. RESISTENZA ELETTRICA del conduttore. La corrente elettrica è causata dalla presenza di un campo elettrico. Un campo elettrico è associato ad una differenza di potenziale. E’ possibile esprimere il legame esistente, nei conduttori metallici, tra corrente elettrica e differenza di potenziale esistente tra gli. estremi del conduttore in cui circola la corrente i: i = (VA – VB) / R. Legge di Ohm.")
81
LAB = (VA – VB) q = (VA – VB) i t
EFFETTO JOULE LAB = (VA – VB) q = (VA – VB) i t Lavoro necessario per spostare la quantità di carica q da A a B nel tempo t W = L / t = (VA – VB) i Potenza associata allo spostamento di q da A a B Il lavoro L e la potenza W sono dissipati per vincere la resistenza offerta dal mezzo al passaggio delle cariche.
 q = (VA – VB) i t. Lavoro necessario per spostare la quantità di carica q da A a B nel tempo t. W = L / t = (VA – VB) i. Potenza associata. allo spostamento. di q da A a B. Il lavoro L e la potenza W sono dissipati per vincere la. resistenza offerta dal mezzo al passaggio delle cariche.")
82
Per conduttori ohmici:
V = i R W = R i2 = (V)2 / R Termodinamicamente possiamo dire che il lavoro L viene assorbito dal conduttore che vede aumentare la sua energia interna e, di conseguenza, la sua temperatura. Se il conduttore è isolato termicamente si arriva alla fusione del metallo. Se invece il conduttore è in contatto termico con l’ambiente, la sua temperatura aumenta fino al raggiungimento di uno stato di equilibrio in cui l’energia interna non varia più ed il lavoro elettrico viene ceduto all’ambiente sotto forma di calore. L’effetto di riscaldamento di un conduttore percorso da corrente elettrica è detto effetto Joule.
2 / R. Termodinamicamente possiamo dire che il lavoro L viene assorbito dal. conduttore che vede aumentare la sua energia interna e, di conseguenza, la sua temperatura. Se il conduttore è isolato termicamente si arriva alla fusione del metallo. Se invece il conduttore è in contatto termico con l’ambiente, la sua. temperatura aumenta fino al raggiungimento di uno stato di equilibrio in cui. l’energia interna non varia più ed il lavoro elettrico viene ceduto all’ambiente. sotto forma di calore. L’effetto di riscaldamento di un conduttore percorso da corrente elettrica. è detto effetto Joule.")
83
su una carica q in moto con velocita’ v:
Campo MAGNETICO Il campo magnetico B puo’ essere definito attraverso la forza che esercita su una carica q in moto con velocita’ v: F = q v x B Forza di Lorentz Caratteristiche di tale forza: e’ perpendicolare al campo B e’ perpendicolare alla velocita’ e quindi allo spostamento della carica non fa lavoro, quindi non puo’ modificare l’energia cinetica di q modifica solo la direzione della velocita’

84
I campi Elettrico e Magnetico variabili nel tempo si propagano
nello spazio e nel tempo: Onde Elettromagnetiche Parametri utili per la descrizione dei fenomeni ondulatori: lunghezza d’onda λ periodo T frequenza ν = 1 / T Nelle onde elettromagnetiche (onde e.m.) le vibrazioni dei campi (elettrico e magnetico) avvengono lungo una direzione perpendicolare alla direzione di propagazione dell’onda: sono cioe’ onde trasversali. Le onde e.m. trasportano energia e quantita’ di moto.
 le vibrazioni. dei campi (elettrico e magnetico) avvengono lungo una. direzione perpendicolare alla direzione di propagazione. dell’onda: sono cioe’ onde trasversali. Le onde e.m. trasportano energia e quantita’ di moto.")
85
Propagazione delle onde e.m.

86
Le onde e.m. possono avere lunghezza d’onda (o frequenza)
compresa in un vasto intervallo di valori. Si parla a tale riguardo di Spettro della radiazione e.m. Ad esempio: le onde TV hanno ~ 108 – 109 Hz (ovvero, dell’ordine del metro) la radiazione visibile ha < < 1015 Hz ( ovvero, dell’ordine del micrometro, cioe’ 10-6 m) i raggi X hanno > 1016 Hz (ovvero, < 10-7 m) L’energia di un’onda e.m. e’ inversamente proporzionale alla sua lunghezza d’onda: i RX hanno quindi energia maggiore della radiazione visibile, che a sua volta e’ piu’ energetica delle onde TV
 la radiazione visibile ha 1014 < < 1015 Hz ( ovvero, dell’ordine del micrometro, cioe’ 10-6 m) i raggi X hanno > 1016 Hz (ovvero, < 10-7 m) L’energia di un’onda e.m. e’ inversamente proporzionale alla sua lunghezza d’onda: i RX hanno quindi energia maggiore della radiazione visibile, che a sua volta e’ piu’ energetica delle onde TV.")
87
Spettro della radiazione elettromagnetica

88
RAGGI X (RX) Nel 1895 W. C. Röntgen, nel corso di studi sulle proprieta’ dei fasci catodici (fasci di elettroni emessi per effetto termoionico da un filamento metallico ed accelerati su un anodo attraverso una d.d.p.: sono per esempio quelli con i quali funzionano gli usuali monitor televisivi e dei PC ), scopri’ che, anche schermando tutto il percorso di tali fasci, le pellicole fotografiche si impressionavano ed i minerali (fluorescenti) presenti si illuminavano. Tali effetti furono spiegati attribuendoli ad una radiazione incognita: i raggi X. In breve Röntgen si accorse che tale radiazione penetrava in alcuni materiali meglio che in altri ed in poche settimane produsse la prima radiografia a raggi X (la mano della moglie).
, scopri’ che, anche schermando tutto il percorso di tali fasci, le pellicole fotografiche si impressionavano ed i minerali (fluorescenti) presenti si illuminavano. Tali effetti furono spiegati attribuendoli ad una radiazione incognita: i raggi X. In breve Röntgen si accorse che tale radiazione penetrava in alcuni materiali meglio che in altri ed in poche settimane produsse la prima radiografia a raggi X (la mano della moglie).")
89
Non si tratta di particelle cariche (come gli elettroni dei raggi
catodici): non possono percio’ essere deviati ne’ da campi elettrici ne’ da campi magnetici. Si tratta di radiazione e.m. con: 10-11 < < 10-9 m diagnostica medica ~ m terapia medica
: non possono percio’ essere deviati ne’ da campi. elettrici ne’ da campi magnetici. Si tratta di radiazione e.m. con: < < 10-9 m diagnostica medica. ~ m terapia medica.")
90
In una radiografia convenzionale (per uso medico o dentistico)
i raggi X attraversano i tessuti corporei e sono rivelati o da una pellicola fotografica o da uno schermo fluorescente. Alle lunghezze d’onda tipiche dei RX i fenomeni di diffrazione e rifrazione, tipici nella propagazione di onde, hanno effetti trascurabili; di conseguenza, i RX subiscono deviazioni minime e procedono quindi su traiettorie pressocché rettilinee. La differenza di assorbimento da parte di varie strutture corporee dà luogo all’immagine prodotta dai raggi trasmessi. L’immagine è in pratica l’ombra proiettata dalle strutture che i RX incontrano come ostacoli. L’immagine a RX non è quindi prodotta focalizzando i raggi con lenti, come avviene nel caso degli strumenti ottici (ad es.: microscopio).
.")
91
si propagano nei mezzi materiali con vibrazione lungo la direzione di
Onde Sonore Le onde sonore sono costituite da oscillazioni meccaniche elastiche che si propagano nei mezzi materiali con vibrazione lungo la direzione di propagazione dell’onda (ONDE LONGITUDINALI). E’ quindi possibile individuare nel mezzo in cui avviene la propagazione dell’onda una successione di COMPRESSIONI e RAREFAZIONI: la variazione dello stato fisico corrisponde ad una variazione di PRESSIONE e di DENSITA’ del mezzo attraversato. Si puo’ percio’ descrivere l’onda sonora come onda di spostamento e come onda di pressione. Necessita’ (a differenza delle onde e.m.) del mezzo di “sostegno” per la propagazione La Sensibilita’ sonora dell’orecchio umano si manifesta nell’intervallo di frequenze comprese tra circa 20 e Hz: 20 < < Hz Le onde sonore con frequenze maggiori di Hz son chiamate Ultrasuoni (ν > Hz)
. E’ quindi possibile individuare nel mezzo in cui avviene la propagazione. dell’onda una successione di COMPRESSIONI e RAREFAZIONI: la. variazione dello stato fisico corrisponde ad una variazione di PRESSIONE. e di DENSITA’ del mezzo attraversato. Si puo’ percio’ descrivere l’onda. sonora come onda di spostamento e come onda di pressione. Necessita’ (a differenza delle onde e.m.) del mezzo di sostegno per la propagazione. La Sensibilita’ sonora dell’orecchio umano si manifesta nell’intervallo di. frequenze comprese tra circa 20 e Hz: 20 < < Hz. Le onde sonore con frequenze maggiori di Hz. son chiamate Ultrasuoni (ν > Hz)")
92
esplosioni artificiali.
In generale, la riflessione di un’onda sonora puo’ essere usata, se si conosce la velocita’ del suono nel fluido attraversato, per determinare la posizione dell’oggetto riflettente. Esempi: Sonar usato per localizzare oggetti nell’acqua (fondali, banchi di pesci, ...). Fa uso di frequenze maggiori di 20 kHz (superiori cioe’ al limite udibile dall’ orecchio umano che e’ di 20 kHz) sia perche’ non sono udibili dagli umani (e percio’ non disturbano gli operatori), sia perche’ (e cio’ e’ di maggiore importanza) aumentando la frequenza diminuisce la lunghezza d’onda (frequenza e lunghezza d’onda sono inversamente proporzionali) e si e’ quindi in grado di rivelare oggetti di dimensioni minori. La struttura interna della Terra viene studiata in modo analogo, analizzando le riflessioni di onde sonore che viaggiano attraverso la Terra e generate da esplosioni artificiali.
. Fa uso di frequenze maggiori di 20 kHz (superiori cioe’ al limite udibile dall’ orecchio umano che e’ di 20 kHz) sia perche’ non sono udibili dagli umani. (e percio’ non disturbano gli operatori), sia perche’ (e cio’ e’ di maggiore. importanza) aumentando la frequenza diminuisce la lunghezza d’onda (frequenza e lunghezza d’onda sono inversamente proporzionali) e si e’ quindi in grado di rivelare oggetti di dimensioni minori. La struttura interna della Terra viene studiata in modo analogo, analizzando. le riflessioni di onde sonore che viaggiano attraverso la Terra e generate da. esplosioni artificiali.")
93
Esempio di uso di Ultrasuoni in diagnostica medica:
In diagnostica medica si usano ultrasuoni con frequenza nell’intervallo : 106 < < 20•106 Hz Esempio di uso di Ultrasuoni in diagnostica medica: ECOGRAFIA: e’ una tecnica molto simile a quella usata col sonar. Un impulso sonoro ad alta frequenza viene diretto nel corpo e vengono rivelate le riflessioni dovute a superfici ed interfacce tra organi ed altre strutture, o da lesioni interne. Si ha quindi la possibilita’ di riconoscimento di tumori o altre proliferazioni anomale o sacche di fluido; si puo’ esaminare il funzionamento di cuore, reni, fegato, cervello. Si puo’ controllare la crescita di un feto. Ai bassi livelli di intensità utilizzati in diagnostica (< W/m2) non esiste evidenza, al momento, di effetti pericolosi (come per i RX). Non e’ pero’ una tecnica che possa sostituire le altre. Per esempio, l’allargamento dei fasci sonori limita la nitidezza delle immagini.
 non esiste. evidenza, al momento, di effetti pericolosi (come per i RX). Non e’ pero’ una tecnica che possa sostituire le altre. Per esempio, l’allargamento dei fasci sonori limita la nitidezza delle immagini.")
94
In terapia medica gli ultrasuoni sono usati per la distruzione
di tumori e calcoli. Sono usati anche nella fisioterapia per riscaldare localmente muscoli danneggiati.

95
Nozioni di Trigonometria Proprietà fondamentali dei Vettori
APPENDICE Nozioni di Trigonometria Proprietà fondamentali dei Vettori

96
NOZIONI ESSENZIALI di TRIGONOMETRIA
Angolo piano θ Si misura in gradi o in radianti θr = larco / r 1º = e’ l’angolo che corrisponde ad 1/360 dell’angolo giro L’angolo di un radiante e’ l’angolo che insiste su un arco di lunghezza pari al raggio del cerchio cui appartiene l’arco

97
Funzioni Goniometriche
In generale, la relazione tra la misura di un angolo in gradi ed in radianti e’: θr = θº • π / 180 Funzioni Goniometriche B sin θ = BH / OB cos θ = OH / OB tg θ = sin θ / cos θ = BH / OH θ O H A dal teorema di Pitagora: BH2 +OH2 = OB2 dividendo entrambi i membri per OB2: BH2/OB2 + OH2/OB2 = sin2 θ + cos2 θ = 1

98
Regola del parallelogramma: Il vettore somma e’ rappresentato dalla
VETTORI Modulo, direzione, verso a |a| c=a+b Somma di vettori: b ovvero, in modo equivalente: a Regola del parallelogramma: Il vettore somma e’ rappresentato dalla diagonale maggiore b c a Prodotto di un vettore per uno scalare: p = k a k > 0 k < 0 a p p a

99
Differenza di vettori:
b c Ovvero: -b c = a-b a Il vettore differenza e’ rappresentato dalla diagonale minore del parallelogramma Vettori di modulo unitario versori Possiamo utilizzare un versore per individuare la direzione ed il verso di un determinato vettore: |u| = 1 a = |a| u u a

100
Scomposizione di un vettore tramite i versori i, j, k:
2 dimensioni y a = ax + ay a = |ax| i + |ay| j a = ax i + ay j y v = |v| i w = |w| j a w ay v j ax i x x 3 dimensioni In modo del tutto analogo scriveremo: a = ax i + ay j + az k

101
Prodotto scalare A φ π (180º) |a| = a |b| = b b φ B O a H a • b = ab cos φ se a b a • b = 0 se a b a • b = ab (+ per vettori equiversi per vettori controversi) a • a = a2 a • b = b • a propr. commutativa a • (b + c) = a • b + a • c propr. distributiva rispetto alla somma
 a • a = a2. a • b = b • a propr. commutativa. a • (b + c) = a • b + a • c propr. distributiva rispetto. alla somma.")
102
Versori assi coordinati
i•i = 1 j•j = 1 k•k = 1 i•j = 0 = j•i i•k = 0 = k•i j•k = 0 = k•j Prodotto scalare in termini di componenti a = ax i + ay j + az k a • b = axbx + ayby + azbz b = bx i + by j + bz k a • b = axbx + ayby + azbz

103
Prodotto vettoriale c = a Λ b
z c (simbolo alternativo: a x b) y a b φ x |c| = ab sin φ direzione di c: perpendicolare al piano individuato da a e b verso di c: dato dalla regola della mano destra (o della vite destrorsa.
 y. a. b. φ. x. |c| = ab sin φ. direzione di c: perpendicolare al piano individuato da a e b. verso di c: dato dalla regola della mano destra (o della vite. destrorsa.")
104
NB: se i vettori non sono complanari: da un punto arbitrario P si
lanciano i vettori a’ = a e b’ = b; si ha che: a’ Λ b’ = a Λ b a // b a Λ b = 0 a b |a Λ b | = ab a Λ b = - b Λ a proprieta’ anticommutativa a Λ (b + c) = a Λ b + a Λ c proprieta’ distributiva rispetto alla somma
 = a Λ b + a Λ c proprieta’ distributiva rispetto. alla somma.")
105
i Λ i = 0 j Λ j = 0 k Λ k = 0 i Λ j = - j Λ i = k k Λ i = - i Λ k = j j Λ k = - k Λ j = i a = ax i + ay j + az k b = bx i + by j + bz k a Λ b = (ax i + ay j + az k) Λ (bx i + by j + bz k) = (aybz – azby)i + (azbx – axbz)j + (axby – aybx)k si puo’ dimostrare usando le proprieta’ del prodotto tra versori
 Λ (bx i + by j + bz k) = (aybz – azby)i + (azbx – axbz)j + (axby – aybx)k. si puo’ dimostrare usando le proprieta’ del prodotto tra versori.")
Presentazioni simili

















![Il lavoro [L]=[F][L]=[ML-2T -2] S.I.: 1 Joule = 1 m2 kg s-2](/2/583996/big_thumb.jpg "Il lavoro [L]=[F][L]=[ML-2T -2] S.I.: 1 Joule = 1 m2 kg s-2>")

