Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Percezione della forma e riconoscimento di oggetti
Emanuela Bricolo Università di Milano Bicocca

2
Sommario Percezione della scena Raggruppamento percettivo
Riconoscimento visivo degli oggetti Agnosie visive Correlati fisiologici Modelli e teorie del riconoscimento degli oggetti Il riconoscimento dei volti è speciale?

3
Percezione della forma
Detection Discloses the presence of an object from the surround. Object must be distinguished from surrounding in at least one possible way (e.g color) Discrimination Distinguishes one object from another Identification Select a particular object or person from a category
 Discrimination. Distinguishes one object from another. Identification. Select a particular object or person from a category.")
4
Visione spaziale Studia gli attributi di un oggetto per determinarne la forma Due stadi: analisi globale della scena a lungo raggio analisi locale dell’immagine retinica a corto raggio

5
Percezione della scena
Quando vediamo una scena ne estraiamo il significato immediatamente in circa ms I dettagli sono analizzati più tardi Che tipo di informazioni ci permettono di capire la scena così velocemente? La configurazione globale dei grandi oggetti che costituiscono la scena?

6
Il contesto influenza la ricerca

7
Schemi delle scene Una rappresentazione mnemonica di una scena prototipica viene velocemente attivata durante la visualizzazione della scena stessa. La “schema” attivato invoca aspettative circa i tipi di oggetti che possono essere presenti nella scena influenzando l’identificazione degli oggetti effettivamente presenti Frequenze spaziali a scala grossolana così come il colore caratteristico giocano un ruolo importante nell’attivazione del prototipo

8
Percezione della scena
Cercare un oggetto in uno scenario coerente è più facile che cercarlo in uno scenario jumbled Il trovare un’oggetto in uno scenario è più facile quando è consistente con il resto dello scenario che nel caso in cui violi una o più criteri relazionali: dimensione, posizione, sostegno, probabilità, interposizione Tutte queste relazioni sono considerate elementi dello schema dello scenario

9
Un approccio ibrido Analisi da globale a locale
lo sfondo globale di una scena ha un impatto iniziale in termini di contesto che scompare dopo le prime due o tre fissazioni Successivamente oggetti locali influenzano l’analisi in termini di contesto

10
Rappresentazione di uno scenario
In ogni caso non manteniamo una rappresentazione a alta fedeltà dello scenario Eventi a sorpresa interferiscono con la nostra rappresentazione

11
Riconoscimento di oggetti
Il riconoscimento di oggetti in una scena dipende dal compito e dal contesto Non ci sono abbastanza risorse per ‘vedere’ tutto in ogni dato istante: selezioniamo una parte di uno scenario usando l’attenzione Gli oggetti attesi sono analizzati in dettaglio ma quelli non attesi?

12
Riconoscimento visivo degli oggetti
Gli oggetti sono rappresentati internamente e salvati in memoria Quando un secondo oggetto viene visto una rappresentazione simile viene costruita a partire dall’immagine retinica Per ottenere il riconoscimento le due rappresentazioni sono paragonate

13
Cos’è il riconoscimento degli oggetti
Una corrispondenza tra l’input visivo e una rappresentazione interna di un oggetto formato della rappresentazione calcolo delle rappresentazioni meccanismi utilizzati x la corrispondenza Vari compiti riconoscimento mnemonico, denominazione, matching etc.

14
Costanza della forma Tutte le teorie hanno a che fare con questo problema Sebbene l’immagine sulla retina cambi, noi percepiamo correttamente la stessa forma e la riconosciamo con successo nonostante variazioni di colore - materiale posizione - tessitura dimensione - punto di vista illuminazione - esemplari di una classe What differentiates between this classes is their predictions concerning human performance in recognition task following a change in viewpoint

15
Costanza della forma What differentiates between this classes is their predictions concerning human performance in recognition task following a change in viewpoint

16
Livelli di categorizzazione (Rosch et al., 1976)
Un dato oggetto può essere classificato a vari livelli: livello base (basic or entry level) si riferisce al termine usato per classificare inizialmente entità visive: e.g. cane livello subordinato (subordinate level) membri particolari del livello successivo sono distinti a questo livello; e.g. dalmata livello superordinato (superordinate level) la descrizione della forma non è usata nella classificazione e.g mammifero
 si riferisce al termine usato per classificare inizialmente entità visive: e.g. cane. livello subordinato (subordinate level) membri particolari del livello successivo sono distinti a questo livello; e.g. dalmata. livello superordinato (superordinate level) la descrizione della forma non è usata nella classificazione e.g mammifero.")
17
Due flussi di analisi (Mishkin, Ungerleider & Macko, 1983)
")
18
Visione spaziale cruciale per la localizzazione visiva degli oggetti
segue il corso del fascicolo superiore longitudinale riceve input dalla parte centrale e periferica della retina manda output alle strutture dorsali limbiche e frontali le ultime stazioni di analisi possono essere polisensoriali (Mishkin, Ungerleider & Macko, 1983)
")
19
Visione degli oggetti cruciale per l’ identificaione visiva degli oggetti segue il corso del fascicolo inferiore longitudinale riceve input principalmente dalla parte centrale della retina manda output alle strutture limbiche e frontali è specificatamente visiva per tutto il suo corso (Mishkin, Ungerleider & Macko, 1983)
")
20
Agnosia Visiva Questa etichetta si riferisce alla riduzione della capacità di identificare gli oggetti presentati visivamente non dovuta a: difetti sensoriali elementari (e.g., difetti del campo visivo o degenerazione della retina) disturbi spaziali o attentivi (e.g. neglect) disturbi oculomotori (e.g. aprassia dello sguardo) afasia (e.g. anomia) deterioramento intellettuale
 disturbi spaziali o attentivi (e.g. neglect) disturbi oculomotori (e.g. aprassia dello sguardo) afasia (e.g. anomia) deterioramento intellettuale.")
21
Agnosia visiva Freud (“On aphasia”, 1891) ha introdotto per primo il termine agnosia (dal greco agnosis = ‘assenza di conoscenza’) per designare il mancato riconoscimento di uno stimolo per distinguerlo dalla mancata denominazione che caratterizza l’afasia l’ agnosia visiva è un disturbo abbastanza raro.
 ha introdotto per primo il termine agnosia (dal greco agnosis = ‘assenza di conoscenza’) per designare il mancato riconoscimento di uno stimolo per distinguerlo dalla mancata denominazione che caratterizza l’afasia. l’ agnosia visiva è un disturbo abbastanza raro.")
22
Modello classico dell’ Agnosia di Lissauer
Lissauer (1890) sulla base della patologia umana distinse due stadi nel processo del riconoscimento degli oggetti: stadio appercettivo nel quale il paziente è incapace di costruire il percetto o una rappresentazione dell’oggetto; stadio associativo: il paziente non riesce ad associare al percetto il significato corrispondente o le sue funzioni etc.
 sulla base della patologia umana distinse due stadi nel processo del riconoscimento degli oggetti: stadio appercettivo nel quale il paziente è incapace di costruire il percetto o una rappresentazione dell’oggetto; stadio associativo: il paziente non riesce ad associare al percetto il significato corrispondente o le sue funzioni etc.")
23
Modello di Lissauer Revisionato
La classificazione originale era troppo generica. Il riconoscimento degli oggetti non è un processo unitario e quindi c’è la necessità di studiare i diversi stadi che lo compongono Con l’avanzare degli anni vari autori hanno proposto un ulteriore frazionamento del modello a due stadi.

24
Proposta di Farah (1990;1991) il problema nella rappresentazione percettiva ad alto livello sottostà all’ agnosia associativa Tutti i disturbi hanno una base percettiva Quindi la linea che separa i processi associativi dagli appercettivi riflette una differenza nel livello di analisi percettiva che è stata danneggiata piuttosto che la presenza o l’assenxa di disturbi percettivi

25
Warrington e collaboratori
Agnosia appercettiva La formazione del percetto può essere ulteriormente frazionata in codifica della forma; segmentazione figura-sfondo; categorizzazione percettiva. Agnosia associativa Gli oggetti sono classificati a seconda delle loro funzioni

26
Agnosia appercettiva: diagnosi
E’ difficile definire che livello di degrado delle funzioni visive primarie sia compatibile con una diagnosi di agnosia. Requisiti standard: campo visivo acuità visiva percezione del movimento discriminazione dei colori

27
Agnosia appercettiva

28
Agnosia appercettiva: diagnosi (Warrington et al.)
Codifica della forma Efron test (1968):decidere de due rettangoli che hanno la stessa area sono uguali. Segregazione figura-sfondo Test di Poppelreuter-Gent delle figure sovrapposte o Screening test del VOSP dove viene richiesto di identificare una lettera sovrapposta a rumore random. Categorizzazione percettiva Test delle vedute inusuali: identificare 20 oggetti diversi presentati da un punto di vista canonico e non canonico.
:decidere de due rettangoli che hanno la stessa area sono uguali. Segregazione figura-sfondo. Test di Poppelreuter-Gent delle figure sovrapposte o Screening test del VOSP dove viene richiesto di identificare una lettera sovrapposta a rumore random. Categorizzazione percettiva. Test delle vedute inusuali: identificare 20 oggetti diversi presentati da un punto di vista canonico e non canonico.")
29
Agnosia appercettiva : Codifica della forma

30
Agnosia appercettiva : Segregazione figura sfondo
Poppelreuter-Gent VOSP Screening Test

31
Agnosia appercettiva : Categorizzazione percettiva
Usual View Unusual view Foreshortened Minimal Feature

32
Localizzazione delle lesioni: Agnosia appercettiva
La maggior parte dei neuropsicologi sostiene che è associata con lesioni bilaterali che coinvolgono areee attorno alla fessura calcarina: la corteccia visiva primaria (area 17) e le aree associative circostanti (aree 18 e 19).
 e le aree associative circostanti (aree 18 e 19).")
33
Agnosia Associativa I pazienti devono avere una percezione intatta. Nessun deficit in: Codifica della forma, segregazione figura-sfondo, categorizzazione percettiva Copia di oggetti complessi Discriminazione di figure che differiscono per dettagli Test discriminativi: denominazione nella modalità visiva pantomime categorizzazione semantica

34
Agnosia Associativa

35
Agnosia Associativa il riconoscimento può essere compromesso solo per alcune categorie e non altre: oggetti animati or inanimati: agnosia per gli oggetti; facce: prosopagnosia parole: alexia Tre spiegazioni sono state proposte: Aree diverse immagazzinano diversi tipi di memorie Continuità di processi di riconoscimento: dalle facce come un tutto complesso passando dagli oggetti fino alle parole immagazzinate some combinazioni di parti. Deficit a diversi livelli di categoria

36
Localizzazione delle lesioni: Agnosia Associativa
La lesione cruciale include le aree medio-occipitali-temporali nell’emisfero di sinistra (Mc Carthy & Warrington, 1986; Fwinberg et al., 1994). Ci sono pochi casi di lesioni bilaterali (Iorio et al, 1992).
. Ci sono pochi casi di lesioni bilaterali (Iorio et al, 1992).")
37
Agnosias: Difetti nel riconoscimento
Agnosia: dal greco letteralmente "ignoranza"; l’incapacità di riconoscere oggetti semplici dovuta a lesioni cerebrali. Agnosia per gli oggetti. I pazienti non possono riconoscere gli oggetti comuni ma non hanno difficoltà a riconoscere le facce. L’acuità visiva non è compromessa. Quando agli agnosici per gli oggetti vengono mostrati disegni con “facce nascoste” tra altri oggetti essi riconoscono molto velocemente le facce.

38
Agnosie: Difetti nel riconoscimento

39
Prosopagnosia ("face blindness")
I pazienti non riconoscono i volti delle persone nonostante il riconoscimento in generale sembra intatto. Ancora l’acuità visiva è intatta. I prosopagnosici spesso imparano ad identificare le persone sulla base della capigliatura, l’abbigliamento ed altri indizi periferici. Dissociazione doppia? Questo suggerisce che gli oggetti e le facce possano essere analizzati da aree cerebrali o meccanismi percettivi diversi.

40
Riconoscimento nel cervello intatto
La corteccia inferotemporale (IT) è l’ultima area puramente visiva nel percorso ventrale. Le cellule in quest’area rispondono ad oggetti ed hanno grandi campi recettivi. Esse mostrano diverse proprietà nella scimmia: Risposte selettive per il punto di vista Organizzazione in colonne Neuroni selettivi per le facce
 è l’ultima area puramente visiva nel percorso ventrale. Le cellule in quest’area rispondono ad oggetti ed hanno grandi campi recettivi. Esse mostrano diverse proprietà nella scimmia: Risposte selettive per il punto di vista. Organizzazione in colonne. Neuroni selettivi per le facce.")
41
Risposte selettive per il punto di vista
Quando alle scimmie viene insegnato un compito di riconoscimento dipendente dal punto di vista, si possono trovare neuroni che rispondono in maniera ottimale ad una delle vedute note dell’oggetto. Le risposte diminuiscono mano a mano che l’oggetto viene ruotato lontano da questa veduta preferita.

42
Organizzazione in colonne
Diverse colonne di corteccia hanno neuroni che rispondono a diversi tipi di forme basilari o facce.

44
Primi modelli di riconoscimento
Template-matching confrontare il nuovo stimolo con un set di 'templates’ predefiniti conservati in memoria Analisi delle caratteristiche cosa renda un ‘A’ una A è un gruppo unico di caratteristiche che la definiscono

45
Template-matching Confrontare il nuovo stimolo con un set di 'templates’ predefiniti conservati in memoria. Può essere ampliato incorporando della pre-analisi: rotazione dello stimolo così da riportarlo diritto scalarlo così da portarlo alla dimensione standard etc.

46
Template-matching IL modello può facilmente fallire e portare ad un match scorretto

47
Analisi delle caratteristiche
Cosa rende una ‘A’ una A è il set univoco delle caratteristiche che la definiscono Modello Pandemonium: varie diverse ‘classi’ o ‘strati’ di rivelatori (detectors) o 'demons': Demons di caratteristiche: identificano gli aspetti base dello stimolo come linee orizzontali, angoli acuti etc. Demons cognitive: Rispondono quando particolari configurazioni di queste caratteristiche sono presenti (p.e. due righe verticali e una orizzontale che formano una H). Ciascun tipo di demon risponde (urla) di più quando la sua caratteristica preferita/configurazione è presente, e quindi il decision demon seleziona l’uscita del demon cognitivo che urla di più.
 o demons : Demons di caratteristiche: identificano gli aspetti base dello stimolo come linee orizzontali, angoli acuti etc. Demons cognitive: Rispondono quando particolari configurazioni di queste caratteristiche sono presenti (p.e. due righe verticali e una orizzontale che formano una H). Ciascun tipo di demon risponde (urla) di più quando la sua caratteristica preferita/configurazione è presente, e quindi il decision demon seleziona l’uscita del demon cognitivo che urla di più.")
48
Pandemonium model

49
Insuccessi dei modelli di matching
Le debolezze chiave di questi primi approcci al riconoscimento: terza dimensione differenze superficiali

50
Cambi del punto di vista
Cambi del punto di vista sono considerati altamente diagnostici della bontà del modello perché questi cambiano la geometria dell’immagine

51
Fallimenti dei modelli di matching: 3a dimensione
I modelli furono costruiti principalmente per riconoscere caratteri alfanumerici. Comunque, principalmente il riconoscimento umano del mondo reale viene fatto su oggetti tridimensionale non su simboli bidimensionali.

52
Fallimenti dei modelli di matching: Differenze Superficiali
E’ difficile per questi modelli ‘estrarre’ le similarità di base di esempi ripetuti di un oggetto rappresentando in contemporanea le differenze superficiali (per esempio la scrittura).
.")
53
Approccio diretto (Abu-Mostafa and Psaltis, 1987)
Tutti gli oggetti possibili sono immagazzinati in memoria Requisiti: Grande dimensione della memoria confronti efficienti in parallelo Problemi: l’insieme di tutte le vedute è proibitivamente grande e ridondante non abbiamo sperimentato tutte le possibili vedute di un oggetto in precedenza Una possibile soluzione: Sostituire calcolo a carico di memoria.

54
Teorie computazionali
Approccio delle proprietà invarianti Teoria delle invarianti di alto ordine (Gibson, 1950) Decomposizione degli oggetti in parti Cilindri generalizzati (Marr and Nishihara, 1978) Riconoscimento per componenti (Biederman, 1985) Approccio dell’allineamento (Huttenlocker & Ullman, 1990) Rappresentazione centrate sull’osservatore Interpolazione di vedute (Poggio & Edelman, 1990) Combinazione di vedute (Ullman and Basri, 1991)
 Decomposizione degli oggetti in parti. Cilindri generalizzati (Marr and Nishihara, 1978) Riconoscimento per componenti (Biederman, 1985) Approccio dell’allineamento (Huttenlocker & Ullman, 1990) Rappresentazione centrate sull’osservatore. Interpolazione di vedute (Poggio & Edelman, 1990) Combinazione di vedute (Ullman and Basri, 1991)")
55
Poprietà Invarianti Gli oggetti hanno proprietà invarianti comuni a tutte le loro viste Misura di compattezza Gradienti spaziali e temporali di densità della tessitura (Gibson, 1950) Variante: queste proprietà sono invarianti per un piccolo intervallo di viste di un oggetto (spazi di caratteristiche) Problemi: difficile, quasi impossibile trovare proprietà invarianti semplici con queste caratteristiche compactness measure, ratio of object perimeter length to square root of its apparent area unaffected by rotation translation scaling in the image plane Applied only to limited problems, such as recognition of simple industrial parts under controlled viewing conditions
 Variante: queste proprietà sono invarianti per un piccolo intervallo di viste di un oggetto (spazi di caratteristiche) Problemi: difficile, quasi impossibile trovare proprietà invarianti semplici con queste caratteristiche. compactness measure, ratio of object perimeter length to square root of its apparent area. unaffected by rotation translation scaling in the image plane. Applied only to limited problems, such as recognition of simple industrial parts under controlled viewing conditions.")
56
Basi per il riconoscimento?
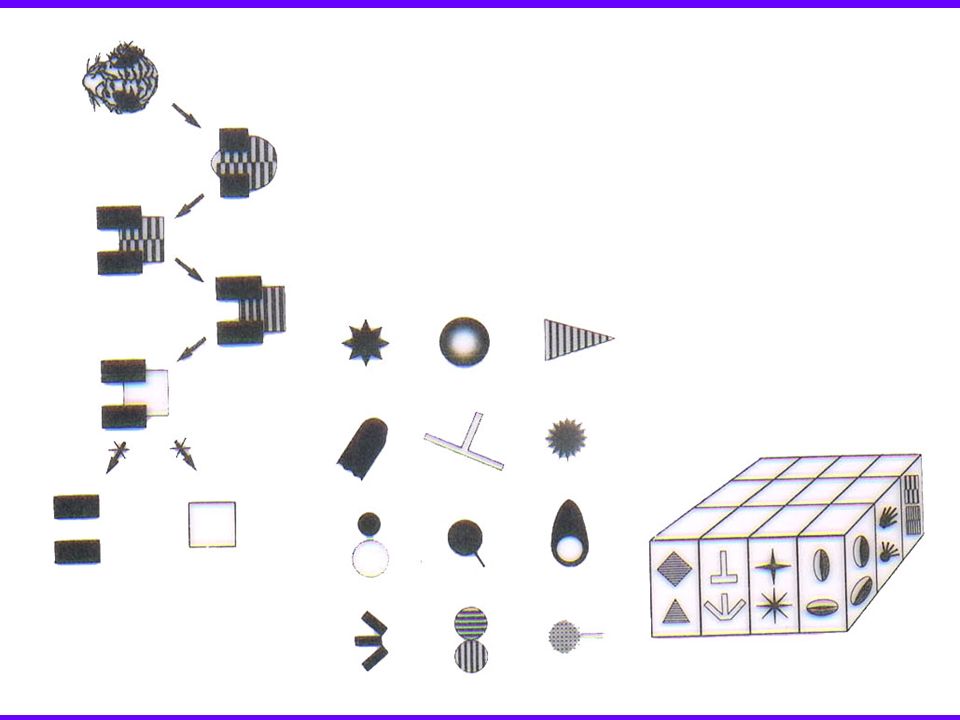
Modelli più recenti del riconoscimento degli oggetti si sono basati su limitazioni delimitanti (o ‘primitiva’) e su strategie base che il sistema visivo potrebbe usare. Marr e Nishihara hanno presentato un modello di riconoscimento ristretto ad un gruppo di oggetti che possono essere descritti come coni generalizzati Geoni (Biederman). Secondo la teoria dei geoni, oggetti complessi che sono formati dalla giustapposizione di parti basilari che li compogono (‘geons’). Approccio dell’allineamento
 e su strategie base che il sistema visivo potrebbe usare. Marr e Nishihara hanno presentato un modello di riconoscimento ristretto ad un gruppo di oggetti che possono essere descritti come coni generalizzati. Geoni (Biederman). Secondo la teoria dei geoni, oggetti complessi che sono formati dalla giustapposizione di parti basilari che li compogono (‘geons’). Approccio dell’allineamento.")
57
Marr e Nishihara Un modello di riconoscimento ristretto ad un gruppo di oggetti che possono essere descritti come generalized cones-- oggetti con un asse principale ben definito e una sezione trasversale di forma costante.

58
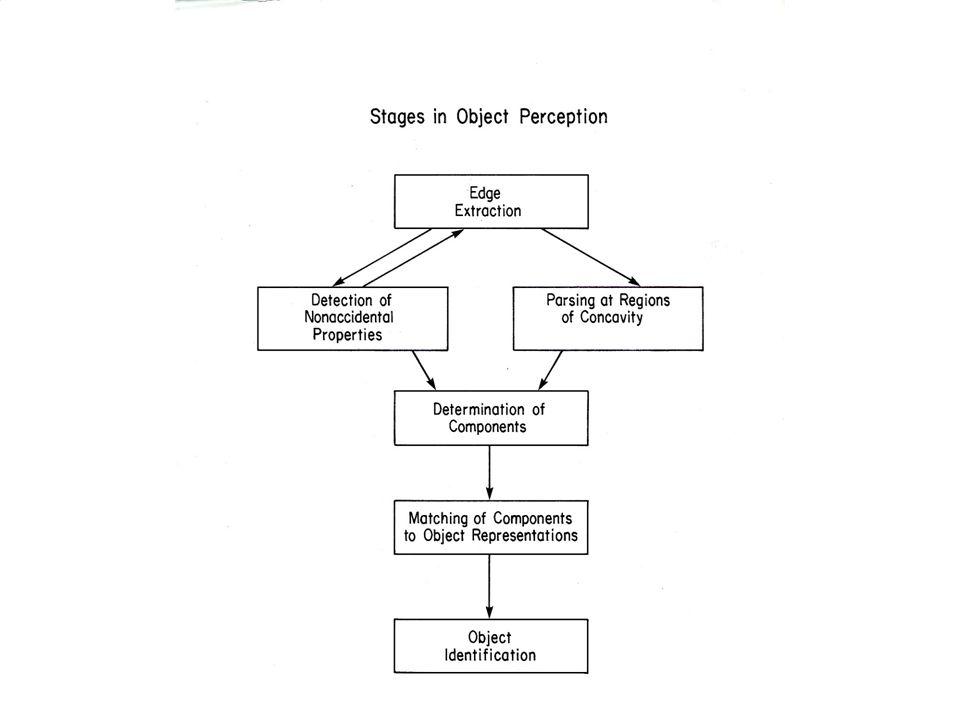
Marr e Nishihara Il riconoscimento avviene con i seguenti livelli:
Asse del modello. Il primo passo nel modello è l’identificazione dell’asse principale dell’oggetto. Assi componenti. Poi gli assi di ciascuna delle sottoporzioni più piccole dell’oggetto vengono identificati. Corrispondenza con il modello 3D. Infine la corrispondenza tra la disposizione dei componenti e una descrizione di modello 3D memorizzato viene eseguita per identificare l’oggetto.

59
Marr e Nishihara: step 1 e step 2

60
Marr e Nishihara: step 3

61
Marr e Nishihara Sebbene i confronti tra oggetti siano più veloci se l’asse principale di un oggetto è lo stesso di quello dell’oggetto con cui viene paragonato, non ci sono dati chiari che sostengono la ‘realtà psicologica del modello di Marr & Nishihara. D’altra parte, è un buon metodo per permettere ai computer di identificare gli oggetti

62
Cilindri generalizzati (Marr e Nishihara, 1978)
descrizione basata sugli assi organizzazione gerarchica parti primitive: cilindri generalizzati gli oggetti sono descritti come un gruppo di cilindri con la loro corrispondente relazione Problemi: insufficiente per caratterizzare l’oggetto molti oggetti non si decompongono naturalmente in parti

63
Riconoscimento dai componenti (Biederman, 1985)
estensione della teoria precedente 36 geoni (geometrical ions) invece dei cilindri generalizzati gli oggetti sono rappresentati dai loro geoni componenti con le relative relazioni spaziali Problemi: insufficienti a caratterizzare l’oggetto molti oggetti non si decompongono naturalmente in parti
 invece dei cilindri generalizzati. gli oggetti sono rappresentati dai loro geoni componenti con le relative relazioni spaziali. Problemi: insufficienti a caratterizzare l’oggetto. molti oggetti non si decompongono naturalmente in parti.")
64
Geoni Secondo la teoria dei geoni, gli oggetti complessi sono creati dalla giustapposizione di parti componenti di base (‘geoni’).
.")
65
Geoni Volumi primitivi semplici
Definiti intermini dicontrasti invarianti al punto di vista sezioni curve o diritte Assi principali curve o diritti Lati paralleli o non paralleli Sono riconosciuti da semplici contrasti dei bordi dell’immagine invarianti dal punto di vista

66
Geoni Qualche prova della realtà psicologica dei geoni viene da esperimentiche mostrano che il riconoscimento fallisce quando nascondiamole intersezioni tra i geoni. Comunque, l’occlusione di queste intersezioni cambia anche l’immagine in molti altri modi.

67
Geons

68
Geons

69
Geons

70
Geons

72
Riconoscimento dai componenti
Debolezza: nessuna conferma fisiologica nessuna spiegazione soddisfacente degli effetti dipendenti dal punto di vista per gli oggetti incapacità di spiegare la classificazione subordinata

73
Approccio dell’allineamento (Huttenlocker e Ullman, 1990)
recupero esplicito e rappresentazione della struttura 3D Preelaborazione di un oggetto allineandolo con il modello memorizzato prima dell’identificazione. Confronto dell’immagine allineata con la rappresentazione memorizzata

74
Combinazione di vedute (Ullman e Basri, 1991)
nessun modello 3D esplicito è necessario identificare punti corrispondenti Proiezioni ortografiche ogni vista è descritta come la combinazione lineare di altre vedute dello stesso oggetto 3 vedute sono necessarie per rappresentare trasformazioni 3D rigide

75
Riconoscimento dipendente dal punto di vista?
Una teoria alternativa del riconoscimento dichiara semplicemente che un gruppo di vedute caratteristiche (immagini mentali) vengano immagazzinate per ogni oggetto. Gli oggetti vengono riconosciuti trovando il più simile tra quelli memorizzati. Questo tipo di modello non richiede di inferire o ricostruire la forma 3D per poter identificare gli oggetti.
 vengano immagazzinate per ogni oggetto. Gli oggetti vengono riconosciuti trovando il più simile tra quelli memorizzati. Questo tipo di modello non richiede di inferire o ricostruire la forma 3D per poter identificare gli oggetti.")
76
Riconoscimento dipendente dal punto di vista?
Sebbene il riconoscimento dipendente dal punto di vista sembri troppo semplice ci sono molte evidenze sperimentali che lo supportano.Per esempio Bulthoff & Edelman hanno insegnato a delle persone a riconoscere le forme di strani oggetti che si erano inventati. Hanno poi testato queste persone sulla loro capacita ti identificare gli oggetti mostrati da (1) lo stesso punto di vista e (2) diversi punti di vista. Le prestazioni erano molto meglio nel primo caso (vedute familiari).
 lo stesso punto di vista e (2) diversi punti di vista. Le prestazioni erano molto meglio nel primo caso (vedute familiari).")
77
Un modello alternativo
Invece di ricostruire un modello 3D, si collezionano e si raggruppano immagini di un oggetto da diversi punti di vista - punti di vista multipli (Multiple-Views) Si generalizza da vedute note a quelle non note usando: Rotazione mentale Interpolazione Misure di similarità
 Si generalizza da vedute note a quelle non note usando: Rotazione mentale. Interpolazione. Misure di similarità.")
78
Dimostrazione sperimentale
Training: Insegnare ai soggetti il nome di un gruppo di oggetti nuovi Practice: far pratica denominando questi oggetti in diversi orientamenti Surprise: sorprendere i soggetti con questi stessi oggetti in orientamenti nuovi mai visti in precedenza

79
Stimoli

80
Previsioni riconoscimento iniziale delle nuove forme: Prime prove
dipendente dal punto di vista - modelli centrati sull’osservatore indipendente dal punto di vista - modelli centrati sull’oggetto prove successive indipendente dal punto di vista - entrambi i modelli lo predicono

81
Previsioni Riconoscimento di nuove forme dopo la pratica:
punti di vista familiari indipendente dal punto di vista - dovuto ad un paragone diretto o ad un paragone con un oggetto invariante alla vista punti di vista non familiari dipendente dal punto di vista - trasformazioni mentali da vedute non familiari a familiari in memoria visiva indipendente dal punto di vista - paragone indipendente dal punto di vista / centrato sull’oggetto

82
Risultati

83
Che cosa dire della 3a dimensione?
Le rotazioni bidimensionali nel piano non sono paragonabili alle rotazioni equivalenti in in profondità che cambiano la geometria dell’immagine

84
Risultati

85
Alcune conclusioni Il riconoscimento degli oggetti è tipicamente dipendente dal punto di vista Il grado di dipendenza dal punto di vista sembra variare con l’omogeneità / similarità tra oggetti Discriminazioni all’interno di una classe, e.g. rondine o passero tendono verso la dipendenza dal punto di vista Discriminazioni tra classi, e.g. uccello o macchina, tendono verso l’indipendenza dal punto di vista

86
Alcune conclusioni Ci sono due meccanismi distinti per il riconoscimento visivo degli oggetti? Uno dipendente dal punto di vista per le discriminazioni fini Uno indipendente dal punto di vista per le discriminazioni grossolane In alternativa potrebbe esistere un meccanismo singolo, flessibile modulato dalla difficoltà del compito.!!!

87
Il riconoscimento delle facce è “speciale”?
Sono state presentate ragioni sia per la specializzazione funzionale che neuroamatomica dell’elaborazione delle facce. Le prove includono: Comportamento/Sviluppo Fisiologia Lesioni cerebrali Imaging cerebrale

88
Comportamento/Sviluppo
Comportamento specifico per le facce sia per gli adulti che per i bambini

89
Schema di sviluppo I neonati preferiscono le facce
A un mese non preferiscono le facce A due mesi preferiscono le facce

90
Due sistemi per il riconoscimento delle facce
Conspec: un dispositivo innato che sottosta la preferenza dei bambini per le conspecifiche. C’è una preferenza per oggetti che hanno proprietà simili alle facce Conlern: un sistema di apprendimento coinvolto da oggetti che il bambino guarda. Gli permette di imparare come distinguere tra facce di individui diversi

91
Conclusione C’è un sistema innato che porta i bambini a guardare alle facce ma un sistema separato di apprendimento che insegna ai bambini a riconoscere le facce di individui diversi

92
Prosopagnosia Lesioni ad una particolare area del cervello causa un deficit selettivo i soggetti possono identificare la maggior parte degli oggetti ma sono completamente incapaci di riconoscere le facce Può denominare facce atraverso il tatto o le descrizioni verbali, quindi non è un problema di denominazione E’ specifico per le facce o vale per ogni identificazione difficile?

93
Due problemi di riconoscimento difficili
Facce e occhiali

94
Tendenze in prosopagnosia
Forse questi soggetti hanno le sesse difficoltà in entrambi i problemi ma pensano di essere meglio con gli oggetti che con le facce Di conseguenza essi possono provare con più convinzione a riconoscere gli oggetti. Usano più tempo. Fanno più tentativi basandosi su informazioni parziali

95
Prove di una tendenza Il paziente SM insiste di avere senza dubbio problemi con il riconoscimeto delle facce ma di essere normale nel riconoscimento degli oggetti - in realtà numerosi studi hanno rilevato che ha grossi problemi con alcune classi di oggetti

96
Prove di una tendenza Citazione da un altro prosopagnosico: “Se non riconosci le facce, in una situazione di socializzazione, o anche quando guardi la TV, le persone se ne andranno prima che tu riesca a riconoscerle. Così non lo fai mai. Nel giro di 8 secondi le persone in tua presenza che non sanno che non sei in grado di riconoscere le facce saranno offesi dalla tua incapacità di riconoscerli. E ancora prima di avere i tuoi otto secondi sarai criticato perché li fissi...”

97
Molto più difficile - più “simile alle facce”
Misurare la tendenza I soggetti dovevano riconoscere oggetti o Greebles. Si monitorava il tempo necessario per la risposta Molto più difficile - più “simile alle facce”

98
Quanto tempo impiegano?
I prosopagnosici spendono circa lo stesso tempo per gli ogetti che per i Greebles, ma utilizzano molto più tempo quando il compito è difficile Per le facce non si preoccupano neanch di provare

99
Neuroni selettivi per il riconoscimento delle facce in IT
E’ stato un risultato controverso quando fu pubblicato la prima volta. I neuroni rispondono davvero alle facce per se, o rispondono ad un gruppo complesso di caratteristiche che le facce hanno per caso? In ogni caso i neuroni in IT hanno grandi risposte alle facce: Visione frontale scimmia: grande risposta. Cancella occhi o bocca: risposta più debole. Rimescolamento random delle caratteristiche: risposta molto piccola. Cambio dell’angolo della faccia gradualmente: Le risposte calano gradatamente con l’aumentare della rotazione della testa. Faccia umana: Grande risposta.

100
Neuroni selettivi per le facce

101
Prove neurofisiologiche

102
Selettività per la faccia umana
Usando fMRI: i soggetti vedono le facce per un po’ e poi fotografie di oggetti. Un’area ('FFA') diventa più attiva durante la visione delle facce; Un’altra area ('PPA') diventa più attivo durante la visione degli oggetti.
 diventa più attiva durante la visione delle facce; Un’altra area ( PPA ) diventa più attivo durante la visione degli oggetti.")
103
Cosa mostra l’fMRI Guardare le facce in un magnete…
produce un mappa di attivazione cerebrale per percepire le facce

104
Cos’altro può riconoscere quest’area dedicata?
Noi facciamo pratica a discriminare tra facce di diversi individui per tutta la vita Hanno cercato di duplicare questa esperienza nel laboratorio in circa 10 ore! Per far questo degli autori hanno creato i Greebles - 60 oggetti simili che i soggetti dovevano imparare a discriminare

105
Il riconoscimento delle facce non è speciale

106
Cosa succede nel cervello quando impari a riconoscere i Greebles?
Dopo aver imparato l’ “area per le facce” è diventata un’area per i Greebles

107
Il riconoscimento delle facce è speciale
Prove sperimentali: I bambini mostrano di avere una tendenza a seguire facce in movimento a soli 30 minuti dopo la nascita. Agnosia per le facce senza agnosia per gli oggetti e viceversa Risultati di fMRI di riconoscimento di oggetti e facce. Effetto inversione. Soggetti normali sono meglio nel riconoscere le facce diritte che invertite. Effetto inversione. I prosopagnosici sono meglio nel riconoscere le facce invertite ch diritte.

108
Il riconoscimento delle facce non è speciale
Prove sperimentali: Nell’IT delle scimmie, colonne per le facce sono mescolate con altre colonne (oggetti/forme). I prosopagnosici spesso mostrano di avere un riconoscimento deficitario di oggetti all’interno di una categoria (P.e. uccelli, macchine, etc). Dopo aver allenato persone a riconoscere oggetti (greebles), queste mostrano riconoscimento simili alle facce (e.g., effetto inversione). Dopo questo allenamento, l’attività del cervello si sposta de un’area per gli oggetti ad un’area per le facce.
. I prosopagnosici spesso mostrano di avere un riconoscimento deficitario di oggetti all’interno di una categoria (P.e. uccelli, macchine, etc). Dopo aver allenato persone a riconoscere oggetti (greebles), queste mostrano riconoscimento simili alle facce (e.g., effetto inversione). Dopo questo allenamento, l’attività del cervello si sposta de un’area per gli oggetti ad un’area per le facce.")
Presentazioni simili

 Conoscenze: assimilazione delle informazioni attraverso l’apprendimento. l’insieme.>")

















