Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
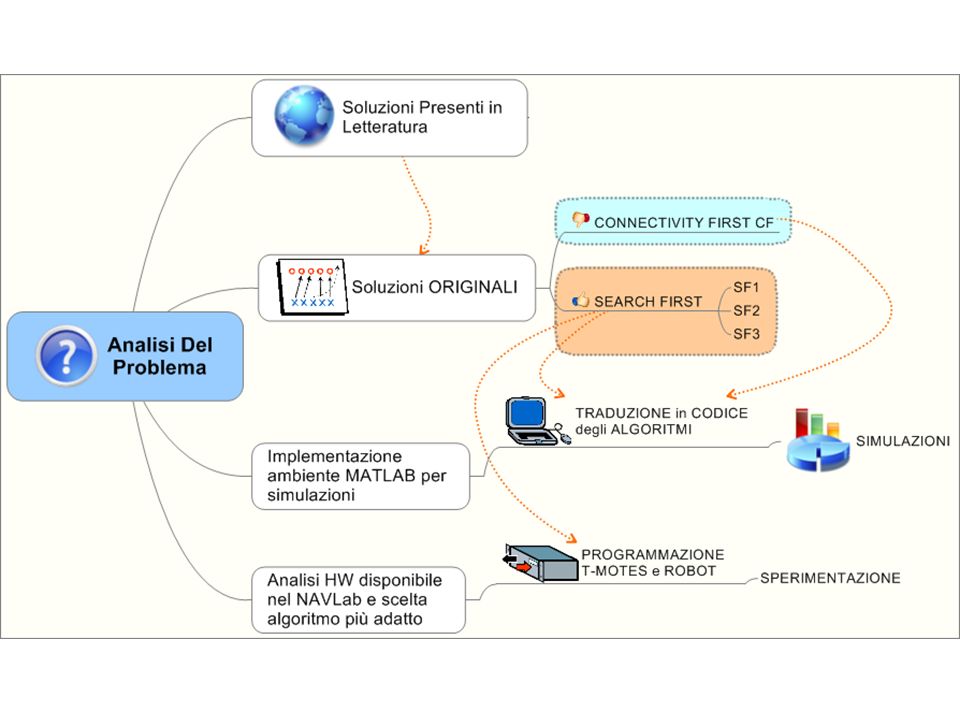
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Localizzazione di sorgenti di segnale ed istituzione di ponti di comunicazione con agenti mobili Massimiliano Lungaro Enrico Maran Gian Antonio Susto CORSO DI PROGETTAZIONE DEI SISTEMI DI CONTROLLO A.A 2007 \ 2008 STESORI: Prof. Luca Schenato 31 marzo2008

2
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Introduzione Gruppo di agenti robotici a disposizione Ricerca Segnale di collocazione ignota e istituzione di un canale comunicativo Nessun Gps Nodo e-puck

4
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Algoritmo CF: Connectivity-First Connettività mantenuta ad ogni passo: movimento sincronizzato degli agenti Idee principali: - esplorare le zone limitrofe - circonferenze sempre maggiori istituendo CATENE

5
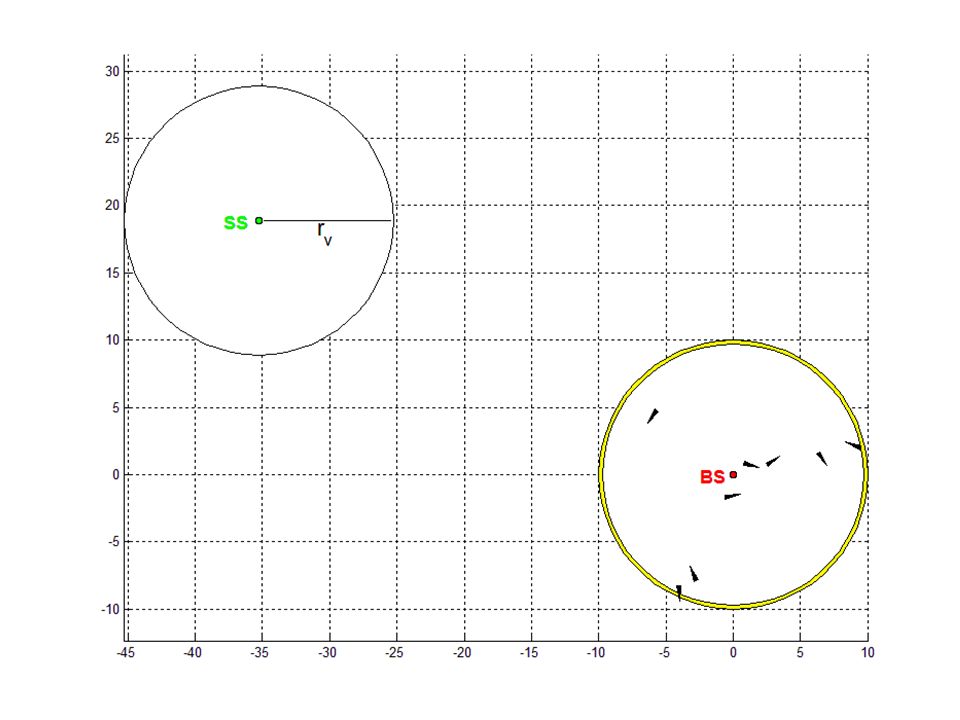
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Ambiente Simulativo la Stazione Base BS N agenti robotici: SCALABILITA’ la Sorgente di Segnale SS di collocazione ignota

7
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Ipotesi iniziali principali Segnali isotropi Agenti puntiformi Nodi identici Sincronismo Odometro Analisi bidimensionale Segnali della stessa ampiezza Distanza deducibile dall’intensità segnale

8
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Mappa Stati dell’alg. CF Assenza di controllo centralizzato Controllo distribuito in base input locali Movimento singolo agente determinato da iterazioni con network visibile

9
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Condizioni iniziali N veicoli disposti casualmente all’interno del raggio di visibilità di BS Raggio sicurezza

10
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Fase iniziale

11
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Calcolo del gradiente Rappresentazione schematica del processo

12
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

13
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Movimento Circolare

14
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Movimento Circolare Continue correzioni: zona correzioni in verde Controllore P

15
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

16
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due Nodi

17
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due Nodi

18
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due nodi Creazione della più semplice catena Lessico ‘familiare’

19
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Adozione fra due Nodi

20
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Adozione fra due Nodi Istituzione catena allineata

21
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Adozione fra due Nodi: fase 3 Stima gradiente BS

22
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Adozione fra due Nodi: fase 4 Mov. rettilineo verso Z

23
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Catena di due Nodi

24
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

25
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scalamento del mov. Circolare

26
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due Catene

27
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due Catene

28
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due Catene

29
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due Catene

30
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due Catene

31
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due Catene

32
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Scontro fra due Catene

33
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Movimento Circolare Catena

34
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

35
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio CF: Critiche Perdita’ connettività a causa: – errato posizionamento iniziale sulla circonferenza –allineamento impreciso nel procedimento di adozione

36
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Implementazione Alternativa Hardware in grado di approssimare funzioni trigonometriche: calcolo grad.

37
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Implementazione Alternativa

38
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Implementazione Alternativa Allineamento perfetto

39
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio CF: Punti di forza Scansione ORDINATA dello spazio –SS vicine trovate in tempi brevi –Piano esplorato in ogni punto Capacità del network sfruttate a pieno: massima esplorazione possibile e tutti i sempre impegnati nella ricerca

40
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Tipologia di algoritmi SF Search First: 1.Ricerca del segnale sorgente 2.Realizzazione del ponte radio Tre diverse implementazioni: SF1 – SF2 – SF3

41
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Tipologia di algoritmi SF SF1 SF2 SF3 si distinguono l’uno dall’altro per la procedura di realizzazione del ponte utilizzata. La fase di ricerca del segnale è uguale per tutti.

42
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Fase di ricerca Posizione iniziale e fase di allontanamento verso limit:

43
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Fase di ricerca Rientro alla base:

44
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Fase di ricerca Reiterazione e visita di una nuova porzione dello spazio:

45
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Fase di ricerca Insieme delle rette percorse dai robot in fase di esplorazione:

46
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Realizzazione del ponte nell’implementazione SF1 Metodo di ripetizione del segnale: Un segnale trasmesso da più sorgenti è più facile da rintracciare rispetto al caso in cui sia trasmesso da una sola sorgente.

47
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

48
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Svantaggi nell’utilizzo dell’SF1 Mancanza di un gerarchia tra le componenti del ponte → alta probabilità di distribuzione disordinata dei veicoli → sovrabbondanza di unità costituenti il ponte. Realizzazione di ponti di lunghezza ridotta rispetto al caso CF → restringimento dello spazio di esplorazione imponibile. Tempi di esecuzione notevolmente crescenti all’aumentare della distanza della SS.

49
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Vantaggi nell’utilizzo dell’SF1 Vantaggi: Rilassamento dell’ipotesi di isotropia dei segnali → semplicità di realizzazione. Operazioni semplici e limitate → complessità computazionale non elevata.

50
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Realizzazione del ponte nell’implementazione SF2 Metodo delle ricerche di taglia decrescente: Semplificazione della ricerca in termini di riduzione del limite entro cui cercare la sorgente di segnale.

51
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

52
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Vantaggi nell’utilizzo dell’ SF2 Istituzione di un ordine gerarchico → ampliamento dell’insieme di casistiche risolvibili rispetto al precedente SF1. Rilassamento dell’ipotesi di isotropia dei segnali → semplicità di realizzazione.

53
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Svantaggi nell’utilizzo dell’ SF2 Aumento della complessità computazionale. Tempi di esecuzione notevolmente crescenti all’aumentare della distanza della SS.

54
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Risultati simulativi: SF1 vs SF2 N = numero di robot distSS min = posizione della SS nei pressi della base (a parità di N) distSS max = posizionamento della SS al limite massimo ammissibile (a parità di N)
 distSS max = posizionamento della SS al limite massimo ammissibile (a parità di N)")
55
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Realizzazione del ponte nell’implementazione SF3 Metodo di aggiunta ed avanzamento: Ci si distacca dalla filosofia di ripetizione del segnale: Realizzazione sistematica del ponte. Mantenimento della connettività tramite movimento coordinato dei veicoli.

56
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Leader Il primo tra i robot che trova la sorgente di segnale. Rientra in base posizionandosi al limite di sicurezza. Detiene la direzione lungo la quale si espanderà il collegamento.

57
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Anelli: procedura di aggiunta alla catena Si ‘accodano’ al leader e provocano l’estensione della catena di una distanza pari ad rs.

58
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Anelli: procedura di aggiunta alla catena

59
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Problema: imprecisioni a fine movimento 2 Gli anelli designati non si posizionano perfettamente dietro al padre. Il calcolo del gradiente non è perfetto.

60
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

61
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Controllo del movimento del k-esimo anello Condizioni: 1.dist1 < rs: se non verificata → blocco immediato del robot 2.dist2 < rs: se non verificata → correzione orientamento

62
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

63
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

64
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio FASE SPERIMENTALE Tmote Sky e-Puck robot Principalmente i dispositivi con cui ricreare il sistema per gli algoritmi di multi-robot search sono stati: IDEAZIONE DELLE SOLUZIONI IMPLEMENTAZIONE NUMERICA E SIMULAZIONE REALIZZAZIONE SPERIMENTALE

65
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Tmote Sky CARATTERISTICHE PRINCIPALI: scheda dotata di memoria Flash e microcontrollore sensori di luce, umidità, temperatura comunicazione via radio trasmettitore ricevitore rivelatore digitale di intensità di segnale in ricezione porte di comunicazione seriali programmazione in nC sistema operativo TinyOS

66
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio e-Puck robot CARATTERISTICHE PRINCIPALI: robot di forma cilindrica in grado di compiere movimenti onnidirezionali due ruote governate da altrettanti motori microprocessore e memoria telecamera, sensori di suono e velocità anello di sensori di prossimità, ciascuno piazzato in corrispondenza di un Led porte di comunicazione seriali Bluetooth programmazione in C software d’appoggio MPLAB

67
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Sviluppo Riscalamento delle potenzialità radio dei Tmotes Selezione dell’algoritmo risolutivo da proporre Analisi delle strutture disponibili nel laboratorio NAVLAB SF2SF1

68
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Aggiustamento della sensibilità di ricezione Effetto di un ostacolo fisico per la comunicazione

69
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio L’interfaccia Tmote basetta e-Puck Agente di ricerca PROBLEMATICHE: software hardware accorgimenti e soluzioni alternative

70
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Considerazioni Riscalamento del problema Impossibilità dell’impiego di acknowledgements Problemi per i calcoli di gradiente Incostanza del segnale trasmesso e anisotropia dell’antenna

71
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Routine mozionale di ricerca Problema: calcolo di gradiente Soluzione: geometria prestabilita per l’istante iniziale Soluzione alternativa Fasi del moto: perlustrazione rettilinea rientro alla base rotazione in senso orario di gradi 360 n lati

72
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio Risultato finale Ponte di comunicazione base - target Base Station Target Tmote Led rosso (intermittenza) comunicazione in corso Led verde Led blu dato inviato all’e-Puck comuncazione stabilizzata
 comunicazione in corso Led verde Led blu dato inviato all’e-Puck comuncazione stabilizzata")
73
LOCALIZZAZIONE DI SORGENTI DI SEGNALE ED ISTITUZIONE DI PONTI DI COMUNICAZIONE CON AGENTI MOBILI Lungaro Massimiliano, Maran Enrico, Susto Gian Antonio

Presentazioni simili



>")








 gli ordini impartiti ad un collaboratore provengono dal suo diretto superiore (unità di comando)>")






