Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
LA TRIANGOLAZIONE FOTOGRAMMETRICA
La triangolazione fotogrammetrica libera la fotogrammetria dalla necessità di disporre di almeno tre punti di appoggio per ciascun modello stereoscopico, da rilevarsi con metodi topografici terrestri e/o satellitari. Questa tecnica consente infatti la determinazione simultanea dei parametri di orientamento esterno di un blocco di fotogrammi, l’eventuale determinazione di parametri di orientamento interno incogniti (nel caso di utilizzo del modello a stelle proiettive) e in genere la determinazione delle coordinate di una serie discreta di punti. Tali punti possono essere punti pre-segnalizzati, naturali o artificiali secondo quanto visto in precedenza. Nel seguito ci occuperemo in particolare delle applicazioni di questa tecnica a un blocco di fotogrammi aerei.
 e in genere la determinazione delle coordinate di una serie discreta di punti. Tali punti possono essere punti pre-segnalizzati, naturali o artificiali secondo quanto visto in precedenza. Nel seguito ci occuperemo in particolare delle applicazioni di questa tecnica a un blocco di fotogrammi aerei.")
2
La triangolazione fotogrammetrica può essere eseguita secondo due tecniche diverse:
compensazione del blocco con il metodo delle stelle proiettive basato sull’uso diretto delle equazioni di collinearità: questo metodo consente di raggiungere le massime precisioni possibili ed è l’unico che consente di utilizzare fotogrammi di natura diversa (metrici, semimetrici e non metrici) permettendo la determinazione dei parametri di orientamento interno incogniti; compensazione del blocco a modelli indipendenti basato sull’orientamento assoluto analitico partendo dall’ipotesi che tutti i modelli stereoscopici costituenti il blocco siano già stati formati. In entrambi i casi occorre procedere a una opportuna preparazione del materiale prima di iniziare le operazioni di misura. Tale operazione è identica per le due metodologie, differendo esse solo per il modello matematico applicato ma non per gli scopi raggiungibili.
 permettendo la determinazione dei parametri di orientamento interno incogniti; compensazione del blocco a modelli indipendenti basato sull’orientamento assoluto analitico partendo dall’ipotesi che tutti i modelli stereoscopici costituenti il blocco siano già stati formati. In entrambi i casi occorre procedere a una opportuna preparazione del materiale prima di iniziare le operazioni di misura. Tale operazione è identica per le due metodologie, differendo esse solo per il modello matematico applicato ma non per gli scopi raggiungibili.")
3
PREPARAZIONE DEI FOTOGRAMMI

5
COMPENSAZIONE DEL BLOCCO A MODELLI INDIPENDENTI
Supponiamo che il blocco sia costituito da fotogrammi con ricoprimento longitudinale del 60% circa e trasversale di circa il 25%. La compensazione a modelli indipendenti parte dalle coordinate modello, ottenute dopo che si è effettuato l’orientamento relativo e si è formato ciascun modello. Nel corso della compensazione del blocco, ogni modello verrà connesso agli altri in un unico blocco e, contemporaneamente, trasformato nel sistema di riferimento terreno: le unità elementari della triangolazione fotogrammetrica a modelli indipendenti sono i singoli modelli stereoscopici. A puro scopo didattico parliamo prima della compensazione puramente planimetrica: si vogliono determinare le coordinate X, Y di punti incogniti osservati sui modelli. Di tali punti sono note le coordinate modello: in particolare di ogni punto si avranno a disposizione un numero di coppie di coordinate pari al numero di modelli all’interno dei quali si trova il punto in oggetto. Considerando lo schema di individuazione dei punti ogni punto di legame si troverà su almeno due modelli, mentre ogni punto di appoggio si potrà trovare anche su un solo modello.

6
I parametri di orientamento esterno dei due fotogrammi 11 e 12 possono essere ricavati dai punti d’appoggio completi 1 e 2 e dal punto altimetrico 3. A questo punto si effettua l’orientamento relativo asimmetrico del fotogramma 13 lasciando immutata la posizione del fotogramma 12: si ottiene un modello orientato assolutamente pur senza ricorrere a punti di appoggio ulteriori. Si può procedere allo stesso modo anche per i modelli successivi

7
Le coordinate modello sono riferite a sistemi locali distinti indipendenti e propri di ciascun modello. Ciascuno di questi sistemi viene rototraslato rispetto al sistema terreno ed ha una scala arbitraria. Per concatenare fra loro i singoli modelli in un unico blocco riferito al sistema terreno fra i dati iniziali abbiamo da un lato i punti di legame (punti che appartengono a più modelli) 5,6,7,8,9 di cui si conoscono solo le coordinate modello e dall’altro i punti di appoggio 1,2,3,4 di cui oltre alle coordinate modello si conoscono anche le coordinate terreno.
 5,6,7,8,9 di cui si conoscono solo le coordinate modello e dall’altro i punti di appoggio 1,2,3,4 di cui oltre alle coordinate modello si conoscono anche le coordinate terreno..")
8
La compensazione consisterà nel trasformare i modelli mediante:
traslazioni rotazione dimensionamento in modo che: i punti di legame risultino il più possibile coincidenti gli scarti residui sui punti di appoggio siano i più piccoli possibile. Le relazioni matematiche fra sistema modello e sistema terreno possono essere espresse dalle equazioni di un trasformazione conforme nel piano: La non linearità nelle incognite m e K si può eliminare sostituendo:

9
X = Xu + a x - b y Y = Yu + a y + b x
Si ottengono così le equazioni lineari: X = Xu + a x - b y Y = Yu + a y + b x L’estensione del sistema di equazioni a un blocco di fotogrammi è detta trasformazione conforme concatenata nel piano. Per ogni punto di appoggio le equazioni assumeranno la forma: vx = Xu a x - b y - X vy = Yu + a y + b x - Y mentre per ogni punto di legame avremo: vx = Xu a x - b y – X vy = Yu + a y + b x - Y Nell’esempio della figura vista prima abbiamo: 4 x 4 = 16 parametri di trasformazione Xu, Yu, a, b 5 x 2 = 10 coordinate X, Y dei punti di legame per un totale di 26 incognite 4 x 4 x 2 = 32 coordinate modello x, y per un totale di 32 equazioni Il grado di esuberanza risulta uguale a 6.

11
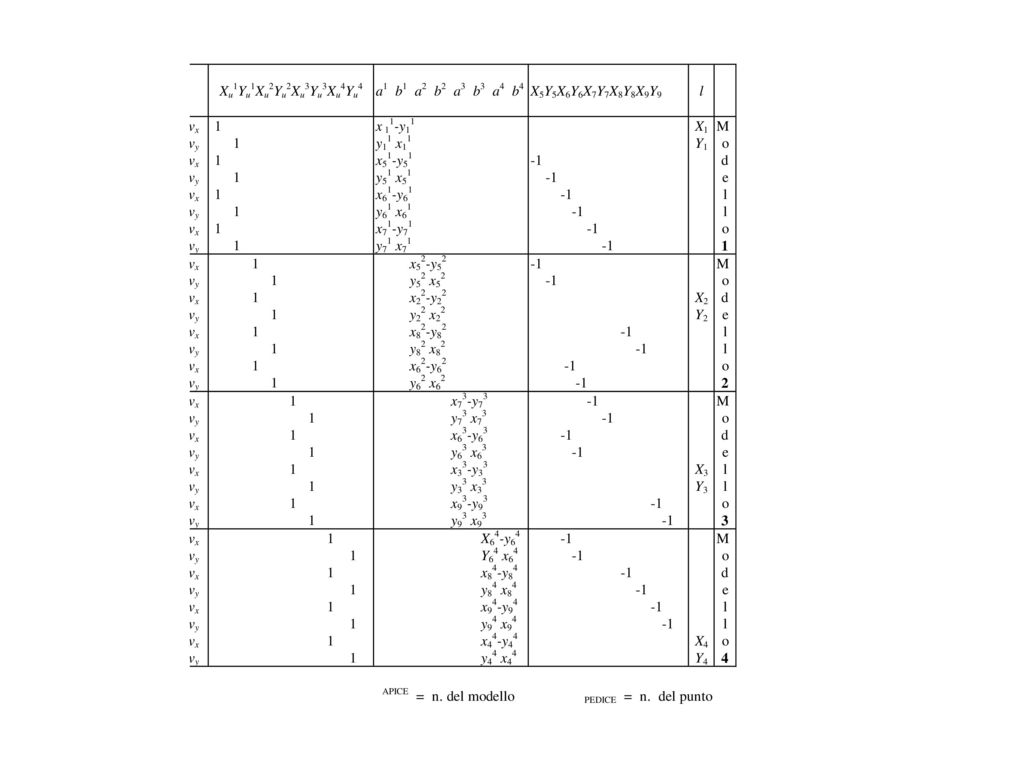
Riferiamo adesso le coordinate modello, in ciascun modello, al suo baricentro, determinando le coordinate baricentriche x e y e supponiamo che tutte le osservazioni abbiano tutte lo stesso peso. Si ottiene così il sistema normale la cui matrice dei coefficienti risulta:

12
Come si nota, il sistema normale relativo alla compensazione planimetrica di un blocco ha una struttura molto particolare che può essere espressa in forma matriciale nel seguente modo: dove: x1 sono i parametri di trasformazione incogniti x2 le coordinate incognite dei punti di legame D1, D2 matrici diagonali NT, N sub-matrici sparse n1 vettore dei coefficienti delle incognite x1 (il corrispondente vettore per le incognite x2 è nullo)
")
13
Poiché nel sistema normale compaiono delle sub-matrici diagonali, è possibile eliminare le incognite x1, oppure le incognite x2, prima di risolvere il sistema. 1° CASO: eliminazione delle incognite x1 Metodo adottato quando si è in presenza di un gran numero di modelli e di pochi punti di legame 2° CASO: eliminazione delle incognite x2 Metodo adottato quando si è in presenza di pochi modelli e un gran numero di punti di legame

14
Torniamo ora al caso comune di compensazione spaziale del blocco
Torniamo ora al caso comune di compensazione spaziale del blocco. In questo caso si calcolano le coordinate X, Y, Z dei punti nel sistema terreno. I dati di partenza sono le coordinate x, y, z di punti appartenenti a modelli stereoscopici formati con operazioni di orientamento relativo. Oltre alle coordinate modello dei punti di legame e di appoggio, si considerano anche quelle dei centri di presa

15
I centri di proiezione vincolano le quote lungo la strisciata
I centri di proiezione vincolano le quote lungo la strisciata. Poiché non esiste un analogo irrigidimento trasversale, è necessario disporre di una rete di punti disposti perpendicolarmente agli assi delle strisciate. In alternativa occorre prevedere un ricoprimento trasversale del 60%.

16
La compensazione spaziale del blocco avviene in questo modo:
i punti di ciascun modello sono definiti in un sistema di riferimento tridimensionale indipendente, che si può trasformare nel sistema terreno mediante i sette parametri dell’orientamento assoluto. Per determinare l’orientamento assoluto simultaneo di tutti i modelli del blocco, abbiamo da un lato le coordinate modello dei punti di legame (compresi i centri di proiezione) e dall’altro le coordinate modello e terreno dei punti di appoggio; ogni modello viene traslato, orientato e dimensionato in modo che i punti di legame compresi i centri di presa risultino il più possibile coincidenti e che gli scarti residui sui punti di appoggio siano i più piccoli possibile (CONCATENAMENTO); a questo punto tutti i modelli sono riferiti al sistema di riferimento nel quale è stato calcolato l’orientamento relativo del primo modello della prima strisciata formando un unico modello stereoscopico all’interno del quale esistono i punti di appoggio di cui sono note sia le coordinate modello sia quelle terreno; si determinano i 7 parametri che trasformano le coordinate modello dei punti di appoggio in coordinate terreno e applicando tali parametri alle coordinate modello dei punti di legame e dei centri di presa si determinano le coordinate terreno di tutti i punti coinvolti nell’operazione di triangolazione.
 e dall’altro le coordinate modello e terreno dei punti di appoggio; ogni modello viene traslato, orientato e dimensionato in modo che i punti di legame compresi i centri di presa risultino il più possibile coincidenti e che gli scarti residui sui punti di appoggio siano i più piccoli possibile (CONCATENAMENTO); a questo punto tutti i modelli sono riferiti al sistema di riferimento nel quale è stato calcolato l’orientamento relativo del primo modello della prima strisciata formando un unico modello stereoscopico all’interno del quale esistono i punti di appoggio di cui sono note sia le coordinate modello sia quelle terreno; si determinano i 7 parametri che trasformano le coordinate modello dei punti di appoggio in coordinate terreno e applicando tali parametri alle coordinate modello dei punti di legame e dei centri di presa si determinano le coordinate terreno di tutti i punti coinvolti nell’operazione di triangolazione.")
17
PRECISIONE PLANO-ALTIMETRICA
NELLA COMPENSAZIONE A MODELLI INDIPENDENTI La riduzione del numero di punti di appoggio rilevati a terra porta in generale a una diminuzione della precisione in confronto all’orientamento assoluto di ogni singolo modello appoggiato su punti rilevati a terra. Nella compensazione tridimensionale del blocco, la precisione planimetrica risultante non è influenzata dalla precisione delle quote modello, né dalla disposizione dei punti di appoggio in quota. Analogamente la precisione altimetrica è indipendente da quella delle coordinate modello x, y e dalla disposizione dei punti di appoggio planimetrici.

18
PRECISIONE PLANIMETRICA
La precisione delle coordinate X, Y di un punto di legame, in seguito alla compensazione del blocco è esprimibile dalla seguente relazione: ESEMPIO: un blocco (fotogrammi a scala media 1:6000) costituito da 32 modelli e dotato di quattro punti di appoggio presegnalizzati (caso d1). Risulta sBL = 6.7 cm La precisione cala fortemente al crescere della dimensione del blocco Lo s.q.m. massimo si ha nella mezzeria dei lati del blocco. sML è la precisione di collimazione che tiene conto dell’errore di collimazione e della materializzazione del punto.
 costituito da 32 modelli e dotato di quattro punti di appoggio presegnalizzati (caso d1). Risulta sBL = 6.7 cm. La precisione cala fortemente al crescere della dimensione del blocco. Lo s.q.m. massimo si ha nella mezzeria dei lati del blocco. sML è la precisione di collimazione che tiene conto dell’errore di collimazione e della materializzazione del punto.")
19
Se si vuole aumentare la precisione occorre predisporre una serie fitta di punti di appoggio lungo i bordi del blocco. Analizzando la figura a lato, si nota che in queste ipotesi: la precisione è quasi indipendente dalle dimensioni del blocco ed è simile a quella del singolo modello

20
Ulteriori punti di appoggio interni al blocco non portano ad aumenti significativi di precisione

22
Le regole per la determinazione della precisione viste fino ad ora sono applicabili anche a blocchi rettangolari, ma non valgono nel caso limite di strisciata singola; di questo caso parleremo in seguito. La quasi uguaglianza tra la precisione del blocco e quella del singolo modello, nel caso di appoggio fitto lungo i bordi, vale anche se i bordi del blocco sono irregolari. La precisione per i punti isolati, cioè appartenenti a un solo modello risulta inferiore di circa il 33% rispetto a quella dei punti di legame. Alcune esperienze pratiche hanno dimostrato che anche aumentando il numero di punti di legame la precisione dei punti isolati non subisce sensibili miglioramenti (considerando 60 punti di legame per ogni modello la precisione dei punti isolati aumento solo del 25%). Diverse sono le indicazioni per consentire di eliminare eventuali errori grossolani all’interno del campione di misure. In questo caso l’esperienza consiglio di usare almeno 8 punti di legame per ciascun modello e coppie di punti di appoggio anziché punti di appoggio isolati.
. Diverse sono le indicazioni per consentire di eliminare eventuali errori grossolani all’interno del campione di misure. In questo caso l’esperienza consiglio di usare almeno 8 punti di legame per ciascun modello e coppie di punti di appoggio anziché punti di appoggio isolati.")
23
PRECISIONE ALTIMETRICA
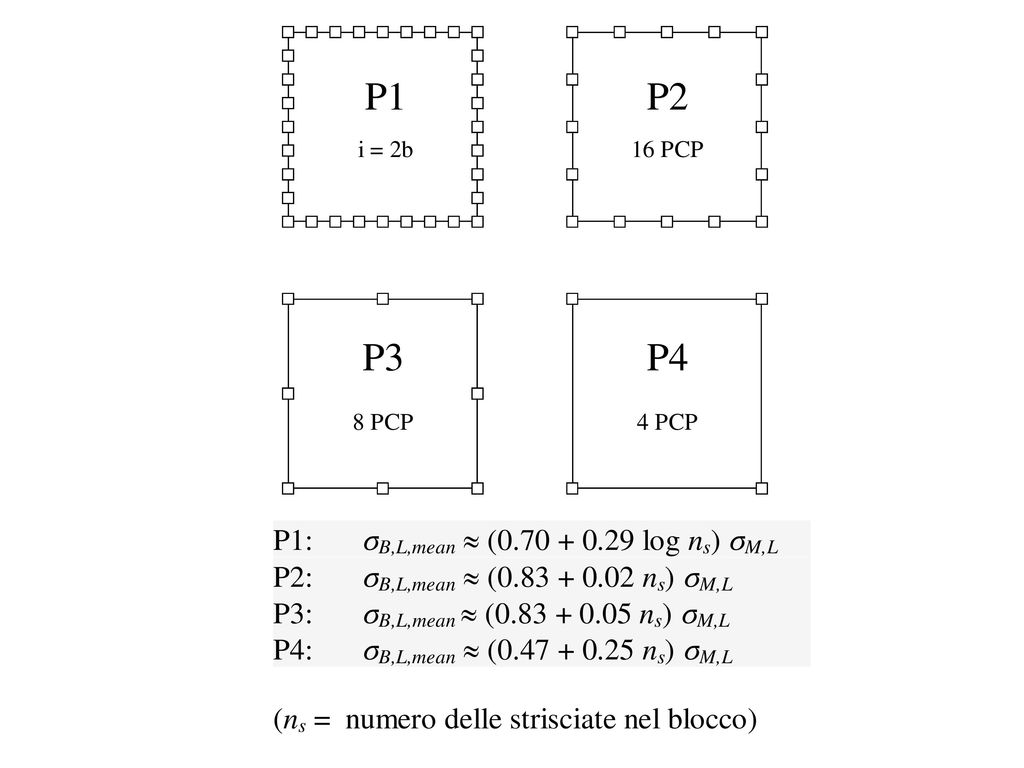
La precisione altimetrica in seguito alla compensazione di un blocco a modelli indipendenti può essere espressa dalla seguente relazione: La precisione in quota dipende in primo luogo dal numero di modelli tra due serie di punti d’appoggio altimetrici (disposti perpendicolarmente all’asse delle strisciate). Per aumentare ulteriormente la precisione è buona norma introdurre punti di appoggio altimetrico a intervalli di i/2 modelli. La configurazione migliore della rete di appoggio in quota è quella illustrata in figura.
. Per aumentare ulteriormente la precisione è buona norma introdurre punti di appoggio altimetrico a intervalli di i/2 modelli. La configurazione migliore della rete di appoggio in quota è quella illustrata in figura.")
24
Questo grafico mostra la relazione tra la precisione in quota dei punti agli spigoli dei modelli e il numero i di modelli compresi fra due linee di punti di appoggio. Si nota la media degli s.q.m. dell’intero blocco e il valore massimo di s.q.m. nella posizione più sfavorevole. In formule: Facendo il paragone con le considerazioni svolte nei riguardi della precisione planimetrica, si nota che la precisione altimetrica è sensibilmente meno favorevole. Se si vuole contenere al massimo il decadimento di precisione è necessario disporre linee di punti di appoggio altimetrico ogni tre modelli. Tale accorgimento provoca un eccessivo costo per cui, come vedremo analizzando alcuni capitolati, si usano file di punti altimetrici ogni quattro modelli.

25
PRECISIONE PLANO-ALTIMETRICA DI STRISCIATE SINGOLE
La precisione dei punti ricavati per triangolazione a modelli indipendenti in una strisciata, dipende principalmente dal numero dei modelli compresi fra punti di appoggio successivi. Il grafico riportato a lato, rappresenta l’andamento degli s.q.m. medi e massimi sia in planimetria che in quota. La riduzione di precisione causata dall’aumento del numero di modelli intermedi ai pnti di appoggio è sensibilmente inferiore all’aumento di precisione derivante dalla maggior scala dei fotogrammi.

26
TRIANGOLAZIONE FOTOGRAMMETRICA A STELLE PROIETTIVE
Nel metodo di compensazione a stelle proiettive (bundle adjustment), di una strisciata o di un blocco di fotogrammi con ricoprimenti minimi del 60% (longitudinale) e 20% (trasversale) si calcolano direttamente le relazioni tra coordinate immagine e coordinate oggetto, senza introdurre le coordinate modelli quale passaggio intermedio. Con questo metodo l’entità elementare del blocco è costituita dal fotogramma.
, di una strisciata o di un blocco di fotogrammi con ricoprimenti minimi del 60% (longitudinale) e 20% (trasversale) si calcolano direttamente le relazioni tra coordinate immagine e coordinate oggetto, senza introdurre le coordinate modelli quale passaggio intermedio. Con questo metodo l’entità elementare del blocco è costituita dal fotogramma.")
27
I punti immagine e il centro di presa di ciascun fotogramma definiscono una stella di raggi nello spazio. I parametri di orientamento esterno di tutte le stelle del blocco, ossia tutti i fotogrammi, vengono calcolati simultaneamente. I dati di partenza sono le coordinate immagine dei punti di legame (punti presenti in più di un fotogramma) e le coordinate immagine e oggetto dei punti di appoggio. PRINCIPIO DELLA COMPENSAZIONE Le stelle proiettive vengono traslate e ruotate in modo che i raggi si intersechino al meglio in corrispondenza dei punti di legame e passino il più possibile per i punti di appoggio. EQUAZIONI ALLE MISURE Le equazioni risolutrici sono rappresentate dalle equazioni di collinearità, le quali devono quindi essere linearizzate come abbiamo già visto all’inizio del corso. Ogni punto immagine dà origine a due equazioni. Ogni fotogramma metrico introduce 6 incognite. Ogni fotogramma non metrico ne introduce 9. Ogni punto di legame introduce 3 incognite aggiuntive.

28
La necessità di linearizzare le equazioni di collinearità richiede la conoscenza di valori approssimati di tutte le incognite del sistema. A questo scopo si può operare in due modi differenti: si esegue dapprima una compensazione a modelli indipendenti le cui soluzioni vengono utilizzate come valori approssimati nella compensazione a stelle proiettive si determinano dei valori di prima approssimazione risolvendo un sistema basato sulle equazioni DLT (Direct Linear Transformation): Queste equazioni sono una semplice riscrittura delle equazioni di collinearità. I parametri L sono funzioni note dei parametri di orientamento interno ed esterno.
: Queste equazioni sono una semplice riscrittura delle equazioni di collinearità. I parametri L sono funzioni note dei parametri di orientamento interno ed esterno.")
29
PRECISIONI DELLA TRIANGOLAZIONE A STELLE PROIETTIVE
Pur avendo utilizzato un diverso modello matematico, la stima delle precisioni di una compensazione a stelle proiettive segue con buona approssimazione le stesse regole già viste per la compensazione a modelli indipendenti. Poiché non si utilizzano le coordinate modello dei punti di legame e di appoggio, affette anche dagli errori dell’orientamento relativo, nell’applicazione delle formule utilizzate per la stima delle precisioni plano-altimetriche dei blocchi, si dimezzano i valori di sM VANTAGGI è il metodo più preciso consente di usare fotogrammi qualunque consente di usare fotogrammi anche molto convergenti fornisce direttamente i parametri di orientamento esterno di tutti i fotogrammi SVANTAGGI il problema non è lineare occorrono calcolatori potenti il problema è sempre 3D

Presentazioni simili



 · B(x) > 0 è soddisfatta dai valori di per i quali i due fattori A(x) e B(x) hanno.>")


 STATIS = Structuration des Tableaux A Trois IndiceS Tecnica esplorativa.>")












