Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Strumenti, Fasi e tecniche
RILIEVO BATIMETRICO Strumenti, Fasi e tecniche Corso di Geofisica Marina e Trattamento dei Segnali Assistente: dott.sa Gaia Mattei Docente: prof. Francesco Giordano

2
Il SONAR Dagli anni 20 in poi si sono impiegali i SONAR (Sound Navigation And Ranging), realizzati per l'individuazione dei sommergibili per la rivelazione di branchi di pesci e per la determinazione della posizione dei fondali marini anche di migliaia di metri. Le frequenze acustiche che sono di interesse in oceanografia, sono comprese tra 1 Hz (una oscillazione al secondo) a centinaia di Kilohertz. La frequenza di oscillazione f e la velocità di propagazione dell’ onda sono legate dalla relazione: v = f x dove è la lunghezza d' onda Considerando che la velocità di propagazione del suono nell' acqua è circa 1500 m/s, abbiamo che per f =1 Hz, la lunghezza d'onda è 1500 metri, mentre per f=200KHz è 7.5mm. La maggior parte dei Sonar lavora tra i 10 ed i 100 KHz.
, realizzati per l individuazione dei sommergibili per la rivelazione di branchi di pesci e per la determinazione della posizione dei fondali marini anche di migliaia di metri. Le frequenze acustiche che sono di interesse in oceanografia, sono comprese tra 1 Hz (una oscillazione al secondo) a centinaia di Kilohertz. La frequenza di oscillazione f e la velocità di propagazione dell’ onda sono legate dalla relazione: v = f x dove è la lunghezza d onda. Considerando che la velocità di propagazione del suono nell acqua è circa 1500 m/s, abbiamo che per f =1 Hz, la lunghezza d onda è 1500 metri, mentre per f=200KHz è 7.5mm. La maggior parte dei Sonar lavora tra i 10 ed i 100 KHz.")
3
L’Ecoscandaglio L’apparato utilizzato per le operazioni di batimetria è il SONAR che rivela e misura la posizione del fondale rispetto alla posizione del suo trasduttore (che trasforma il pacchetto d'onda elettrico in una pacchetto d'onda in pressione e viceversa). Periodicamente esso invia un pacchetto d'onda verso il fondale; il segnale riflesso dal fondale stesso, è ricevuto al tempo t, per cui la profondità del fondale risulta essere: z =(v x t)/2 ove v è la velocità media di propagazione del suono nell’ acqua
. Periodicamente esso invia un pacchetto d onda verso il fondale; il segnale riflesso dal fondale stesso, è ricevuto al tempo t, per cui la profondità del fondale risulta essere: z =(v x t)/2 ove v è la velocità media di propagazione del suono nell’ acqua.")
4
L’Ecoscandaglio La velocità del suono in acqua è data da:
v =(K/r)1/2 dove K è il modulo di elasticità di volume dell'acqua di mare r la sua densità Poiché questi ultimi due parametri dipendono dalla temperatura, dalla pressione e dalla salinità anche la velocità dipende da essi, quindi V = v(t,s,p) Empiricamente la velocità del suono risulta compresa tra 1420 e Esistono formule per calcolare la velocità in funzione dei parametri di cui sopra.
1/2 dove. K è il modulo di elasticità di volume dell acqua di mare. r la sua densità. Poiché questi ultimi due parametri dipendono dalla temperatura, dalla pressione e dalla salinità anche la velocità dipende da essi, quindi. V = v(t,s,p) Empiricamente la velocità del suono risulta compresa tra 1420 e Esistono formule per calcolare la velocità in funzione dei parametri di cui sopra.")
5
L’Ecoscandaglio Il trasduttore dello scandaglio deve essere immerso in acqua Il coefficiente di riflessione r tra i due mezzi per un suono, inteso come perturbazione di pressione, proveniente dall’ aria, risulta essere pari a r = (Zacqua - Zaria)/(Zacqua + Zaria) Le Z sono le impedenze acustiche cioè il prodotto della densità per la velocità di propagazione del suono nel mezzo, acqua o aria. Quindi nel caso di un suono proveniente dall’aria abbiamo: la velocità del suono nell' aria 330 m/s ; densità dell’ aria, in condizioni normali, 1.2 Kg/m3, r = (15xl )/(15 x l ) =1 Cioè se il trasduttore è emerso il suono viene totalmente riflesso e non penetra in acqua.
/(Zacqua + Zaria) Le Z sono le impedenze acustiche cioè il prodotto della densità per la velocità di propagazione del suono nel mezzo, acqua o aria. Quindi nel caso di un suono proveniente dall’aria abbiamo: la velocità del suono nell aria 330 m/s ; densità dell’ aria, in condizioni normali, 1.2 Kg/m3, r = (15xl )/(15 x l ) =1. Cioè se il trasduttore è emerso il suono viene totalmente riflesso e non penetra in acqua.")
7
La risoluzione Per quanto attiene il potere risolutivo di questi strumenti acustici, il massimo teorico è legato alla lunghezza d'onda l, corrispondente alla frequenta di lavoro dello strumento: l = v/f In pratica il segnale emesso dagli strumenti acustici subacquei è costituito da un pacchetto d’onda contenente alcune oscillazioni sinusoidali, per cui il parametro importante per il calcolo della risoluzione è la durata di questo pacchetto. Moltiplicando la durata per la velocità di propagazione si ottiene la risoluzione radiale del sistema.

8
La precisione A = pR2 ove R = qh
L' incertezza sulla posizione del fondale e sulla sua morfologia è dovuta: all’incertezza sul valore dalla velocità v alla relazione tra l’angolo solido omega (espresso in radianti) di apertura del fascio acustico, uguale al rapporto tra la lunghezza d'onda ed il diametro del trasduttore, e l'eco riflessa dal fondale alla profondità h, che è relativa ad un’area del fondale stesso pari approssimativamente a A = pR2 ove R = qh Quindi il segnale riflesso è da intendere come risposta dovuta alla energia rinviata dall'area predetta, cioè una sorta di media areale. trasduttore omega h R
 di apertura del fascio acustico, uguale al rapporto tra la lunghezza d onda ed il diametro del trasduttore, e l eco riflessa dal fondale alla profondità h, che è relativa ad un’area del fondale stesso pari approssimativamente a. A = pR2 ove R = qh. Quindi il segnale riflesso è da intendere come risposta dovuta alla energia rinviata dall area predetta, cioè una sorta di media areale. trasduttore. omega. h. R.")
9
La precisione In sede di restituzione dei dati e di determinazione della profondità, è necessario tenere conto dell' azione combinata delle maree, delle correnti, del vento e della morfologia del fondo e della costa eventualmente presente. La determinazione della marea astronomica legata alla posizione della Luna e del Sole rispetto alla Terra, è prevedibile essendo perfettamente periodica, tramite il calcolo previsionale che utilizza le "Tavole di Marea'‘. Questa correzione è esauriente quando ci si trova in situazioni meteomarine e morfologiche estremamente favorevoli. Vero è che le operazioni batimetriche di precisione normalmente si svolgono in situazioni di questo genere, ma comunque il livello marino può essere alterato di alcuni centimetri per l’ azione di correnti, all’azione del vento ed alla morfologia della costa. E' necessario quindi, per ridurre l’indeterminazione sulla posizione del fondale, disporre di un mareografo in posizione vicina alla costa per poter registrare le variazioni di altezza della colonna d'acqua nel periodo delle operazioni.

10
Sigle beam Il sonar a fascio singolo o single beam misura il tempo di andata e ritorno di un segnale acustico tra il suo trasmettitore / ricevente, il cosiddetto trasduttore che assolve alla funzione di trasmettitore e ricevitore in tempi differenti, ed un bersaglio che è quasi sempre il fondale marino. La profondità del fondale z è pari a: Z = ½ cwt Dove t è il tempo impiegato di andata e ritorno del segnale e cw è la velocità di propagazione dello stesso nell’acqua

11
Calcolo di z Per la profondità del fondale z’ rispetto al pelo dell’ acqua è invece necessario considerare se il trasduttore, che opera da trasmettitore e da ricevente, è immerso di Dz : z’ =z+Dz Dz trasduttore Z’ Z

12
La risoluzione Il potere risolutivo di un’onda acustica, intesa come la distanza minima tra due bersagli (oggetti acusticamente riflettenti) visibili distintamente, è dell’ordine di grandezza della lunghezza d’onda. Risulta importante,quindi la scelta della frequenza di lavoro un funzione delle dimensioni degli oggetti da rilevare. Se f = 1500 Hz è la frequenta di lavoro del sonar, abbiamo, essendo c = 1500 m/s ed 1 Hz = 1 secondo -1 lunghezza d’onda = 1500m/s = 1m 1500Hz Se f = Hz , ovviamente d=3 cm e così via.
 visibili distintamente, è dell’ordine di grandezza della lunghezza d’onda. Risulta importante,quindi la scelta della frequenza di lavoro un funzione delle dimensioni degli oggetti da rilevare. Se f = 1500 Hz è la frequenta di lavoro del sonar, abbiamo, essendo c = 1500 m/s ed 1 Hz = 1 secondo -1. lunghezza d’onda = 1500m/s = 1m. 1500Hz. Se f = Hz , ovviamente d=3 cm e così via.")
13
La risoluzione Altro fattore importante per il potere risolutivo è la larghezza del fascio d’onda emesso dal sonar. Un fascio conico stretto è l’ideale per fondali bassi ed uniformi, un fascio largo tende a fornire una informazione media sull’area illuminata. Il segnale riflesso da un fondale inclinato può non essere captato dal ricevitore che coincide con il trasmettitore (a fascio stretto). Il sonar a fascio largo può captare echi laterali dovuti a bersagli non importanti.
. Il sonar a fascio largo può captare echi laterali dovuti a bersagli non importanti.")
14
Multibeam Il principio di funzionamento di un Multibeam può essere illustrato prendendo in considerazione il Seabeam della General Instruments Inc (SA), riportato nella figura seguente. Il trasmettitore è costituito da 20 sorgenti acustiche a 12KHz (12.000Hz) e trasmette impulsi di 7 millisecondi, interessando un angolo solido di 54° x 2.67° perpendicolare alla direzione della nave. Il sistema ricevente, sempre montato a carena della nave consiste di un array di 40 idrofoni che hanno la capacità di ricevere in un angolo di 2.26° con una profondità di 20° nella direzione di navigazione. (a )fascio trasmesso (b) strips di ricezione (c) intersezione tra i due precedenti, che determina l’area di fondale coperta realmente. Le strips sono estese longitudinalmente “20°”, per tenere conto del moto della nave ed evitare la perdita di segnale in ricezione.
, riportato nella figura seguente. Il trasmettitore è costituito da 20 sorgenti acustiche a 12KHz (12.000Hz) e trasmette impulsi di 7 millisecondi, interessando un angolo solido di 54° x 2.67° perpendicolare alla direzione della nave. Il sistema ricevente, sempre montato a carena della nave consiste di un array di 40 idrofoni che hanno la capacità di ricevere in un angolo di 2.26° con una profondità di 20° nella direzione di navigazione. (a )fascio trasmesso (b) strips di ricezione (c) intersezione tra i due precedenti, che determina l’area di fondale coperta realmente. Le strips sono estese longitudinalmente 20° , per tenere conto del moto della nave ed evitare la perdita di segnale in ricezione.")
15
Multibeam L' area di copertura è l'intersezione dell' area di trasmissione con quella di ricezione. Nella figura le aree sono quadrate ma nella realtà sono di forma ellittica. Il processing è tale che le due descrizioni sono equivalenti. La striscia di fondale interessata è suddivisa m 16 aree, ciascuna di esse è esplorata con cadenza di misura di 3.3 millisecondi (300 Hz). (a )fascio trasmesso (b) strips di ricezione (c) intersezione tra i due precedenti, che determina l’area di fondale coperta realmente. Le strips sono estese longitudinalmente “20°”, per tenere conto del moto della nave ed evitare la perdita di segnale in ricezione.
. (a )fascio trasmesso (b) strips di ricezione (c) intersezione tra i due precedenti, che determina l’area di fondale coperta realmente. Le strips sono estese longitudinalmente 20° , per tenere conto del moto della nave ed evitare la perdita di segnale in ricezione.")
16
Campagna batimetrica Una campagna di batimetrie si divide tipicamente in: FASE ESECUTIVA acquisizione dati di posizione e profondità FASE RESTITUTIVA con moderne metodologie e tecnologie per la ricostruzione delle carte batimetriche Strumento utilissimo durante lo svolgimento di entrambe le fasi è il GIS, per la gestione ed elaborazione dei dati.

17
Campagna batimetrica La FASE ESECUTIVA si suddivide a sua volta in Pianificazione e Realizzazione della campagna. La Pianificazione è necessaria per una razionale organizzazione della campagna, una valutazione dei costi in termini di tempo e di risorse, nonché per uno studio preliminare delle aree da indagare da un punto di vista ambientale, layers previsti: cartografia dell’area, con sistema di coordinate appropriato layer delle linee di navigazione, con sviluppo lineare della navigazione layer della base station layers relativi alle informazioni ambientali necessarie, come presenza di pontili scogli o altro La Realizzazione della campagna stessa necessita dell’utilizzo di un software di navigazione, possibilmente in grado di intergare i dati di posizione e quelli di profondità.

18
Campagna batimetrica La FASE RESTITUIVA si suddivide a sua volta in post – processing ed elaborazione dei dati. Il Post – processing, che consente di analizzare in dettaglio, nonché sovrapporre, i dati di campagna in maniera uniforme all’interno di un unico progetto GIS, layers previsti: Layer dei dati GPS di navigazione Dati batimetrici interpolati Foto dell’area, se presenti La Elaborazione, necessaria per interpretare tutti i risultati ottenuti da un punto di vista spaziale al fine di catalogare i siti di interesse archeologico, layers previsti: Grid derivanti dalle analisi spaziali dei dati geofisici Realizzazione di carte 2D e 3D

19
Pianificazione Georeferenziazione del della cartografia
Realizzazione del piano di navigazione Ricognizione del sito e Individuazione della base station

20
Post - Processing Importazione dei punti GPS e controllo della percentuale di copertura dell’area Importazione e pre - elaborazione dei dati di profondità

21
Elaborazione dati I dati batimetrici, sono elaborati in un sistema GIS, attraverso appositi strumenti di interpolazione, al fine di trasformare le misure da puntuali in continue. Gli output che si possono ottenere nel caso dei dati batimetrici sono: isolinee di uguale profondità (isobate) – tipica elaborazione utilizzata per produrre una carta batimetrica dell’area DTM del fondale marino – necessario per ricostruire un paesaggio virtuale del sito archeologico sommerso. Gli interpolatori che il GIS usa per ottenere gli output suddetti sono: IDW; Kriging; Spline.
 – tipica elaborazione utilizzata per produrre una carta batimetrica dell’area. DTM del fondale marino – necessario per ricostruire un paesaggio virtuale del sito archeologico sommerso. Gli interpolatori che il GIS usa per ottenere gli output suddetti sono: IDW; Kriging; Spline.")
23
Carta batimetrica del Parco Archeologico sommerso di Baia

24
Elaborazione dati Le misure batimetriche interpolate possono essere utilizzate per realizzare una carta batimetrica, come precedentemente detto, oppure ulteriormente analizzate per calcolare lo SLOPE ossia la massima variazione fra celle adiacenti del GRID. Questa analisi serve a valutare la variazione (percentuale o in gradi) della pendenza del fondale marino.
 della pendenza del fondale marino.")
25
Calcolo dello Slope

26
Riepilogo strumentazione principale
Strumenti Riepilogo strumentazione principale IMBARCAZIONI PRINCIPALI Imbarcazione da 25 m con sistema integrato di posizionamento e acquisizione dati Sistema Zodiac per bassi fondali con sistema integrato d’acquisizione e posizionamento Sistema integrato alta precisione con multibeam GPS+Ecoscandaglio single beam DGPS Trimble model 4700 Trimble model 4000 Trimble model Pocket Pathfinder 12 canali L1/L2 8 canali L1 ECOSCANDAGLIO DIGITALE HMEX – SonarLITE single beam 200KHz 0.30m-80 m ECOSCANDAGLIO ANALOGICO Raython DC200Z 200 KHz 0-100 m Riepilogo Dotazione software GIS ESRI ArcView 9 Countour ArcView 3D Analyst Modelli spaziali ArcView Spatial Analyst Posizionamento GPS ArcView Tracking Analysis GIS per palmare ArcPad

27
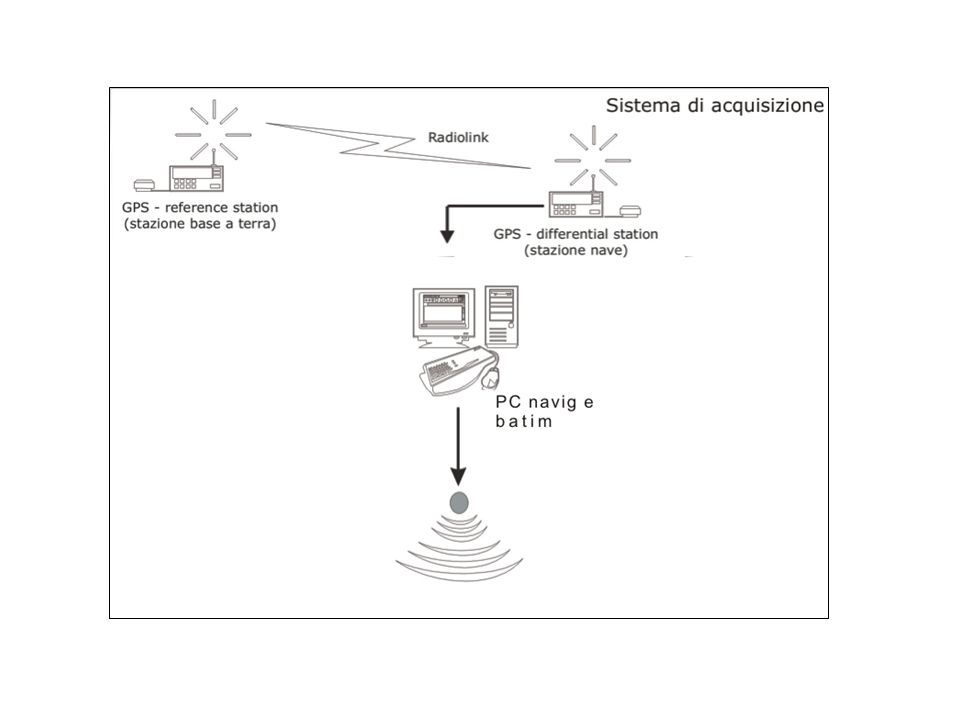
SISTEMA DI ACQUSIZIONE

28
Strumentazione e allestimento

Presentazioni simili