Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
MATLAB-SIMULINK Simulink Ing. Alessandro Pisano pisano@diee.unica.it
Bergamo, 17-19/11/2009

2
Indice 3 7 9 11 16 20 27 28 31 37 40 43 44 59 63 68 73 81 85 90 99 109 112 123 133 Introduzione Librerie e blocchi elementari (1) Realizzazione di un modello Esempio: costruzione e visualizzazione di una sinusoide Scelta del solutore Modifica delle impostazioni predefinite Utilizzo di variabili dal workspace Librerie e blocchi elementari (2) Esportazione dati verso il Workspace e su file esterno Esempio: filtro passa basso Integratore Esecuzione automatizzata di test Analisi spettrali (FFT) Filtraggio digitale Esempio: sistema termico ad 1 e 2 gradi di libertà Utilizzo di blocchi Trasnfer function Esempio: Simulazione di un sistema di regolazione di temperatura Creazione di sottosistemi Mask Esempio Distribuzione di temperatura nel rotore di una turbina Realizzazione di sistemi MIMO LTI Variabili popup e checkbox Esempio: sistema di frenatura con ABS Embedded Matlab Function Toolbox avanzati. SimMechanics e SimDriveline
 Realizzazione di un modello. Esempio: costruzione e visualizzazione di una sinusoide. Scelta del solutore. Modifica delle impostazioni predefinite. Utilizzo di variabili dal workspace. Librerie e blocchi elementari (2) Esportazione dati verso il Workspace e su file esterno. Esempio: filtro passa basso. Integratore. Esecuzione automatizzata di test. Analisi spettrali (FFT) Filtraggio digitale. Esempio: sistema termico ad 1 e 2 gradi di libertà. Utilizzo di blocchi Trasnfer function. Esempio: Simulazione di un sistema di regolazione di temperatura. Creazione di sottosistemi. Mask. Esempio Distribuzione di temperatura nel rotore di una turbina. Realizzazione di sistemi MIMO LTI. Variabili popup e checkbox. Esempio: sistema di frenatura con ABS. Embedded Matlab Function. Toolbox avanzati. SimMechanics e SimDriveline.")
3
Finestra di avvio (v. 7.8.0) Editor M-files Avvio SIMULINK
Cartella corrente

4
Programmazione dei modelli di simulazione per via grafica

5
Possibilità di suddividere il modello complessivo in sottosistemi paralleli o embricati (un sottosistema può essere importato direttamente in un modello di simulazione differente) Possibilità di definire finestre di parametrizzazione (Masks) Esportazione nel workspace Matlab dei risultati della simulazione Esecuzione automatizzata di test Toolbox avanzati: SimDrivelline e SimMechanics
 Esportazione nel workspace Matlab dei risultati della simulazione. Esecuzione automatizzata di test. Toolbox avanzati: SimDrivelline e SimMechanics.")
6
Avvio SIMULINK New Librerie principali

7
Libreria “Commonly used blocks”

8
Libreria “Sinks” Libreria “Sources”

9
Realizzazione di un modello Simulink
Pagina di lavoro

10
Realizzazione di un modello Simulink
3 fasi 1. Importare nella pagina di lavoro i blocchi elementari Simulink necessari, trascinandoli con il mouse dalla rispettiva libreria (drag-and-drop) 2. Parametrizzare i blocchi Simulink nelle rispettive finestre di parametrizzazione, alle quali si accede dalla pagina di lavoro facendo doppio click con il mouse sopra il blocco stesso. 3. Collegare tra loro i blocchi Simulink tracciando le opportune linee di interconnessione in modo da realizzare le funzionalità desiderate
 2. Parametrizzare i blocchi Simulink nelle rispettive finestre di parametrizzazione, alle quali si accede dalla pagina di lavoro facendo doppio click con il mouse sopra il blocco stesso. 3. Collegare tra loro i blocchi Simulink tracciando le opportune linee di interconnessione in modo da realizzare le funzionalità desiderate.")
11
Esempio introduttivo: costruzione e visualizzazione di un segnale sinusoidale
Sono sufficienti due blocchi elementari: un blocco che generi il segnale desiderato, ed un blocco che ne permetta la visualizzazione. Il primo blocco lo troveremo nella libreria “Sources” (blocco Sine Wave), Il secondo blocco (blocco Scope), si trova nella libreria “Sinks”. I blocchi necessari vanno importati nella pagina di lavoro Untitled trascinando con il mouse (drag-and-drop) l’icona del blocco all’interno della pagina di lavoro. Il risultato di tale procedura è mostrato in Figura. Salvare il modello e attribuire un nome al file con estensione .mdl
, Il secondo blocco (blocco Scope), si trova nella libreria Sinks . I blocchi necessari vanno importati nella pagina di lavoro Untitled trascinando con il mouse (drag-and-drop) l’icona del blocco all’interno della pagina di lavoro. Il risultato di tale procedura è mostrato in Figura. Salvare il modello e attribuire un nome al file con estensione .mdl.")
12
Si deve ora collegare l’uscita del generatore di funzione “Sine Wave” con l’ingresso del blocco di visualizzazione “Scope”. Per effettuare un collegamento tra due blocchi vi è una procedura rapida. Si deve selezionare il blocco di origine (cliccandovi sopra), e si deve successivamente selezionare il blocco di destinazione con il tasto ctrl premuto. Un collegamento correttamente eseguito viene indicato come in Figura In alternativa, si può portare la freccia del mouse nel punto di origine del collegamento e quindi “tracciarlo” tenendo premuto il tasto sinistro del mouse, portandosi fino al punto di destinazione.
, e si deve successivamente selezionare il blocco di destinazione con il tasto ctrl premuto. Un collegamento correttamente eseguito viene indicato come in Figura. In alternativa, si può portare la freccia del mouse nel punto di origine del collegamento e quindi tracciarlo tenendo premuto il tasto sinistro del mouse, portandosi fino al punto di destinazione.")
13
Devono ora essere impostati i parametri di ampiezza, frequenza e sfasamento che definiscono la particolare sinusoide che si desidera generare. A tal fine è necessario fare doppio click sul blocco “Sine Wave”, e come risultato si apre una finestra di dialogo all’interno della quale vanno impostati i parametri di funzionamento. Ampiezza Bias Frequenza Sfasamento Tasto OK

14
Si deve ora impostare la durata (cioè l’intervallo temporale) della simulazione.
La durata si può impostare direttamente dai menù della pagina di lavoro Tasto RUN Durata (valore di default 10.0) Cliccando sul tasto RUN viene eseguita la simulazione. Dopo che è stata eseguita la simulazione si può visualizzare il segnale generato cliccando sul blocco Scope.
 Cliccando sul tasto RUN viene eseguita la simulazione. Dopo che è stata eseguita la simulazione si può visualizzare il segnale generato cliccando sul blocco Scope.")
15
Ora si aumenti la frequenza della sinusoide da 1 rad/s a 2 rad/s
Si ripeta la simulazione. Si ri-aggiorni il grafico della finestra grafica Scope cliccando sul pulsante nella barra dei menu della finestra Scope Grafico “spigoloso” Si deve andare a modificare il “metodo di integrazione”, che definisce il passo di discretizzazione temporale che viene impiegato nella simulazione del modello.

16
Il metodo di integrazione (Solver) si imposta selezionando il menu della pagina di lavoro Simulation->Configuration Parameters
 si imposta selezionando il menu della pagina di lavoro Simulation->Configuration Parameters")
17
La scelta del solutore con il quale di risolvono numericamente le equazioni differenziali del modello è ovviamente irrilevante per il semplice esempio in esame che non coinvolge alcun legame differenziale. Il motivo della spigolosità del grafico sta nel fatto che il metodo proposto di default (ode45 a passo variabile) ha “scelto” dei passi di discretizzazione temporale piuttosto elevati, e sono stati quindi generati “pochi campioni” del segnale In modelli di simulazione complessi, la scelta del solutore numerico (Runge-Kutta, Dormand-Prince, Eulero,…) e delle relative caratteristiche (passo fisso/variabile, etc) va fatta con criterio.
 ha scelto dei passi di discretizzazione temporale piuttosto elevati, e sono stati quindi generati pochi campioni del segnale. In modelli di simulazione complessi, la scelta del solutore numerico (Runge-Kutta, Dormand-Prince, Eulero,…) e delle relative caratteristiche (passo fisso/variabile, etc) va fatta con criterio.")
18
Runge-Kutta e Dormand-Prince sono degli ottimi solutori “general-purpose”.
Per simulazioni “multi-domain” con la copresenza di costanti di tempo molto differenti tra loro sono consigliati i metodi a passo variabile dedicati ai problemi Stiff (es. ode15s/stiff). Per simulazioni con elementi discontinui (non-smooth dynamics) i metodi a passo variabile talvolta forniscono risposte non veritiere. Il solutore Eulero a passo fisso, con un passo sufficientemente piccolo, è ritenuto affidabile per sistemi non-smooth. Si scelga il solutore ode1 (Eulero) a passo fisso, e se ne imposti il Fixed-Step size a 0.001
. Per simulazioni con elementi discontinui (non-smooth dynamics) i metodi a passo variabile talvolta forniscono risposte non veritiere. Il solutore Eulero a passo fisso, con un passo sufficientemente piccolo, è ritenuto affidabile per sistemi non-smooth. Si scelga il solutore ode1 (Eulero) a passo fisso, e se ne imposti il Fixed-Step size a")
19
Considerazioni aggiuntive
Una scelta ottimale per il solutore bilancia, per il problema in esame, la precisione della soluzione e la mole di calcoli richiesta, che influenza il tempo di simulazione. Per identificare un solutore adeguato serve esperienza. Il passo di campionamento deve essere commisurato alla rapidità di variazione dei segnali in gioco. Quando si sceglie un solutore a passo variabile si può pensare di introdurre un limite massimo per il passo adattativo. Quando il modello non contiene stati continui (non vi sono cioe blocchi “dinamici” come Integratori, blocchi Transfer Fcn, etc.) Simulink usa il solutore “discrete” anche se viene specificato un solutore differente,.
 Simulink usa il solutore discrete anche se viene specificato un solutore differente,.")
20
Modifica delle impostazione predefinite per i files Simulink all’apertura

21
Modificare le Solver Options come in figura

22
Modificare le Data Import/Export Options come in figura

23
Si ripeta la simulazione e si riaggiorni il grafico
Il grafico della sinusoide è ora correttamente rappresentato. In base alla scelta fatta per il passo fisso del solutore, vengono ora generati, e interpolati dal grafico, 1000 campioni per ogni secondo di evoluzione del segnale. La sinusoide viene però mostrata a partire dall’istante t=5. Sono stati “persi” i campioni precedenti. Il motivo è che, al fine di non saturare rapidamente la memoria del programma, vige in Simulink una impostazione di default in base alla quale nei blocchi di tipo Scope vengono visualizzati e mantenuti in memoria solo gli ultimi 5000 campioni del segnale.

24
Per modificare tale impostazione per uno specifico blocco si deve cliccare sul pulsante Parameters nella finestra del blocco Scope La finestra “Scope Parameters” ha due sottomenu: “General” e “Data History”. Dal sottomenu Data History si deve disselezionare la check-box “Limit data points to last ..”

25
Ora ripetendo la simulazione e riaggiornando il grafico la sinusoide viene visualizzata per intero
Per visualizzare un segnale costituito dalla somma di tre sinusoidi importiamo nella pagina di lavoro due nuove istanze del blocco elementare Sine Wave, ed importiamo anche un blocco che rappresenti un nodo sommatore (blocco Sum dalla libreria dei Commonly Used Blocks)
")
26
Il blocco Sum deve essere preliminarmente parametrizzato specificando il numero di segnali in ingresso, ed il segno con il quale concorrono alla sommatoria, per mezzo di una stringa (es. +++ +) Scegliamo +++ L’aspetto del blocco diventa Dopo aver cancellato la linea di collegamento preesistente tra il primo blocco Sine Wave ed il blocco Scope, si realizzi la connessione riportata in Figura.

27
Ora si possono assegnare i parametri di ampiezza, frequenza, bias e sfasamento, delle tre sinusoidi, rieseguire la simulazione e visualizzare il grafico prodotto dal blocco Scope . Tutte le variabili definite nel workspace di Matlab sono disponibili e accessibili da parte dei blocchi Simulink. I parametri di un modello possono essere espressi utilizzando delle variabili (es. A1,f1,b1, …) alle quali si può assegnare un valore con un file script Matlab da eseguirsi prima della esecuzione della simulazione. A1=1; f1=1; b1=5; phi1=0; A2=4; f2=pi; b2=2; phi2=pi/2; A3=1; f3=4*pi; b3=2; phi3=0; Il modello può essere in questo modo riparametrizzato con estrema facilità.
 alle quali si può assegnare un valore con un file script Matlab da eseguirsi prima della esecuzione della simulazione. A1=1; f1=1; b1=5; phi1=0; A2=4; f2=pi; b2=2; phi2=pi/2; A3=1; f3=4*pi; b3=2; phi3=0; Il modello può essere in questo modo riparametrizzato con estrema facilità.")
28
Libreria “Continuous”
Libreria “Discontinuities” Libreria “Discrete”

29
Libreria “Lookup Tables”
Libreria “Math operations”

30
Libreria “Model Verification”
Libreria “Signal routing”

31
Vediamo come esportare in Matlab i dati prodotti eseguendo i modelli Simulink.
Serve il blocco To Workspace dalla libreria Sinks Il blocco To Workspace riceve in ingresso il segnale (scalare o vettoriale) che salva nel workspace. Il blocco si interconnette agli altri come in Figura. Per tracciare un collegamento a partire da un collegamento preesistente si deve portare il mouse nel punto di diramazione, premere il tasto destro, e poi allontanarsi e tracciare il collegamento tenendo il tasto destro premuto, fino a giungere al punto di destinazione del collegamento
 che salva nel workspace. Il blocco si interconnette agli altri come in Figura. Per tracciare un collegamento a partire da un collegamento preesistente si deve portare il mouse nel punto di diramazione, premere il tasto destro, e poi allontanarsi e tracciare il collegamento tenendo il tasto destro premuto, fino a giungere al punto di destinazione del collegamento.")
32
Si mantenga il valore unitario di default.
Il blocco To Workspace va parametrizzato specificando il nome della variabile che verrà creata nel workspace di Matlab (scegliere y) ed il formato di salvataggio (è opportuno modificare il formato di default Structure e selezionare invece Array) . Per ottimizzare l’impiego della memoria del programma si può anche impostare un fattore intero di decimazione (es. con decimation = 10 i dati vengono salvati nel workspace con uno step temporale 10 volte superiore, quindi si avranno meno elementi nel vettore y). Si mantenga il valore unitario di default. Il vettore dei tempi viene salvato di default sotto forma di array con il nome tout. Bisogna però disabilitare una impostazione che limita a 1000 il numero massimo di elementi per tout. Si deve andare ne Simulation->Configuration Parameters, e nel menu Data Import/Export disselezionare la check-box Limit Data Points to Last box
 ed il formato di salvataggio (è opportuno modificare il formato di default Structure e selezionare invece Array) . Per ottimizzare l’impiego della memoria del programma si può anche impostare un fattore intero di decimazione (es. con decimation = 10 i dati vengono salvati nel workspace con uno step temporale 10 volte superiore, quindi si avranno meno elementi nel vettore y). Si mantenga il valore unitario di default. Il vettore dei tempi viene salvato di default sotto forma di array con il nome tout. Bisogna però disabilitare una impostazione che limita a 1000 il numero massimo di elementi per tout. Si deve andare ne Simulation->Configuration Parameters, e nel menu Data Import/Export disselezionare la check-box Limit Data Points to Last. box.")
33
Lanciando la simulazione vengono creati nel workspace di Matlab gli array y e tout.
Verificarlo digitando il comando whos Si può visualizzare in Matlab il grafico del segnale con il comando plot(tout,y),grid
,grid.")
34
Esportazione su file dei dati prodotti da modelli Simulink.
Se si desidera che i dati siano non solo esportati nel workspace di Matlab ma anche salvati in modo permanente su un file, si può generare un file dati nel formato binario .mat con il blocco To File, dalla libreria Sinks I files con estensione mat sono detti mat-files. Il blocco deve essere parametrizzato specificando nella apposita finestra di configurazione: Il nome (comprensivo dell’estensione) del mat-file che verrà creato (es. y_test1.mat). Il nome che verrà assegnato alla variabile quando il mat-file sarà successivamente aperto in Matlab (scegliere y) E’ possibile impostare una decimazione dei dati. Se si sceglie una “Decimation” > 1 è bene generare anche un vettore dei tempi “sincrono” con la variabile sottocampionata
 del mat-file. che verrà creato (es. y_test1.mat). Il nome che verrà assegnato alla variabile. quando il mat-file sarà successivamente. aperto in Matlab (scegliere y) E’ possibile impostare una decimazione dei dati. Se si sceglie una Decimation > 1 è bene generare anche un vettore dei tempi sincrono con la variabile sottocampionata.")
35
Lanciare la simulazione, e verificare come nella cartella di lavoro sia ora presente il file y_test1.mat Possono essere esportati segnali vettoriali. Per mezzo del blocco Mux (libreria Commonly Used Blocks) si possono “aggregare” i tre segnali sinusoidali in un unico segnale vettoriale con tre componenti.
 si possono aggregare i tre segnali sinusoidali in un unico segnale vettoriale con tre componenti.")
36
La struttura interna dei mat-files prevede la memorizzazione dei dati in una struttura rettangolare
I mat-files possono essere aperti successivamente in Matlab con il comando load. >> load y_test1 Viene generata nel workspace di Matlab una variabile matriciale avente il nome specificato nella finestra di configurazione del blocco To File e la struttura rettangolare riportata sopra.

37
Filtro passabasso + Vin Vout Consideriamo un filtro passa-basso RC
Equazione differenziale Equazione differenziale esplicitata rispetto alla derivata di ordine più elevato Posso realizzare uno schema di simulazione utilizzando un blocco Integrator, un blocco Sum e un blocco Gain, oltre che ovviamente un generatore di segnale per costruire la tensione di ingresso ed un blocco Scope per visualizzare la tensione di uscita.

38
R=1e4; % 10k Ohm C=1e-5; % 10 pF Modello Simulink.
Grazie al blocco Mux è possibile visualizzare i segnali Vin e Vout nel medesimo blocco Scope. Inseriamo anche un blocco “To Workspace” (nome variabile vout, tipo array) Assegniamo un valore ai parametri scrivendo un semplice script R=1e4; % 10k Ohm C=1e-5; % 10 pF La costante di tempo del filtro vale RC=0.1 s
 Assegniamo un valore ai parametri scrivendo un semplice script. R=1e4; % 10k Ohm. C=1e-5; % 10 pF. La costante di tempo del filtro vale RC=0.1 s.")
39
Finestra di parametrizzazione del Signal Generator.
4 tipologie di segnali disponibili (sinusoidale, onda quadra, dente di sega, random) Il filtro può essere implementato in forma più compatta mediante un blocco Transfer Function Rappresentazioni equivalenti Si devono specificare i coefficienti dei polinomi a numeratore e denominatore della FdT utilizzando la notazione Matlab per la rappresentazione dei polinomi
 Il filtro può essere implementato in forma più compatta mediante un blocco Transfer Function. Rappresentazioni equivalenti. Si devono specificare i coefficienti dei polinomi a numeratore e denominatore della FdT utilizzando la notazione Matlab per la rappresentazione dei polinomi.")
40
Integratore Nella finestra di parametrizzazione dell’integratore il parametro piu importante da settare è la condizione iniziale (Initial Condition), che di default viene impostata pari a zero Se l’integratore riceve in ingresso un segnale vettoriale, genera in uscita un vettore di pari dimensione che contiene l’integrale delle diverse componenti del vettore di ingresso Possono essere introdotte saturazioni inferiori e/o superiori sulle uscite dell’integratore. Può essere anche applicato un reset sull’uscita del’integratore. Il reset riporta l’uscita dell’integratore al valore della condizione iniziale
, che di default viene impostata pari a zero. Se l’integratore riceve in ingresso un segnale vettoriale, genera in uscita un vettore di pari dimensione che contiene l’integrale delle diverse componenti del vettore di ingresso. Possono essere introdotte saturazioni inferiori e/o superiori sulle uscite dell’integratore. Può essere anche applicato un reset sull’uscita del’integratore. Il reset riporta l’uscita dell’integratore al valore della condizione iniziale.")
41
Integratore con ingresso vettoriale
Condizioni iniziali diverse per le uscite

42
Integratore con saturazione superiore

43
Esecuzione automatica di test
Il seguente codice lancia in sequenza due simulazioni con valori diversi dei parametri R e C, memorizza la Vout nelle due prove nei vettori y1 ed y2, e traccia dei grafici delle varie soluzioni in tre finestre grafiche distinte % VERIFICA CHE IL MODELLO SIA APERTO, E IN CASO CONTRARIO LO APRE if isempty(find_system('Name','filtropassabasso')) open_system('filtropassabasso') end R=1e4; % 10k Ohm C=1e-5; % 10 pF sim('filtropassabasso'); y1=vout; figure(1) plot(tout,vout) C=2e-5; % 20 pF y2=vout; figure(2) figure(3) plot(tout,y1,tout,y2) IMP. Utilizzo della funzione sim(‘model’)
) open_system( filtropassabasso ) end. R=1e4; % 10k Ohm. C=1e-5; % 10 pF. sim( filtropassabasso ); y1=vout; figure(1) plot(tout,vout) C=2e-5; % 20 pF. y2=vout; figure(2) figure(3) plot(tout,y1,tout,y2) IMP. Utilizzo della funzione sim(‘model’)")
44
Risposte in frequenza e analisi spettrali
Impariamo ora a visualizzare la risposta in frequenza di filtri lineari, e a visualizzare lo spettro di frequenza di un segnale campionato. Per il filtro considerato Le seguenti istruzioni richiedono all’utente l’inserimento da tastiera dei parametri R e C R=input('Inserire il valore di R [Ohm] (valore consigliato: R=1e4): \n'); C=input('Inserire il valore di C [Farad] (valore consigliato C=1e-5): \n'); Con i valori consigliati per R e C, la pulsazione di taglio è pari a 1/RC = 10 rad/sec ft=1.6 Hz omega_t=1/(R*C); disp(['La frequenza di taglio è: ', num2str(omega_t/(2*pi)),‘ rad/sec']);
: \n ); C=input( Inserire il valore di C [Farad] (valore consigliato C=1e-5): \n ); Con i valori consigliati per R e C, la pulsazione di taglio è pari a 1/RC = 10 rad/sec ft=1.6 Hz. omega_t=1/(R*C); disp([ La frequenza di taglio è: , num2str(omega_t/(2*pi)),‘ rad/sec ]);")
45
Posso definire in Matlab un oggetto di tipo “Transfer Function”
e visualizzarne quindi la sua risposta in frequenza (più precisamente: i diagrammi semilogaritmici del modulo in dB e della fase della Funzione di Risposta Armonica F(jw) in funzione della pulsazione w) con il comando Bode bode(F),grid; Cambiamo il valore della costante di tempo RC, e ritracciamo i diagrammi
 in funzione della pulsazione w) con il comando Bode. bode(F),grid; Cambiamo il valore della costante di tempo RC, e ritracciamo i diagrammi.")
46
Ora riferiamoci allo schema modificato
Il generatore di segnali è sostituito da un blocco Fcn (libreria User-Defined Functions) che riceve in ingresso il segnale prodotto dal blocco Clock (libreria Sources) , cioè il tempo corrente. Il blocco To Workspace scrive la variabile out, di tipo array. Il blocco Fcn puo implementare una qualunque funzione statica, e si parametrizza compilando, nella apposita finestra di configurazione del blocco, una casella di testo in linguaggio Matlab, con la variabile standard “u” che denota la variabile in ingresso al blocco Il codice A1*sin(omega1*u)+A2*sin(omega2*u) definisce un segnale somma di due sinusoidi con ampiezza e pulsazione parametrizzate dai coefficienti A1, omega1, A2, omega2. Il blocco Fcn consente di implementare facilmente segnali con una espressione analitica anche complessa, che potrebbero richiedere un elevato numero di blocchi elementari.
 che riceve in ingresso il segnale prodotto dal blocco Clock (libreria Sources) , cioè il tempo corrente. Il blocco To Workspace scrive la variabile out, di tipo array. Il blocco Fcn puo implementare una qualunque funzione statica, e si parametrizza compilando, nella apposita finestra di configurazione del blocco, una casella di testo in linguaggio Matlab, con la variabile standard u che denota la variabile in ingresso al blocco. Il codice A1*sin(omega1*u)+A2*sin(omega2*u) definisce un segnale somma di due sinusoidi con ampiezza e pulsazione parametrizzate dai coefficienti A1, omega1, A2, omega2. Il blocco Fcn consente di implementare facilmente segnali con una espressione analitica anche complessa, che potrebbero richiedere un elevato numero di blocchi elementari.")
47
Assegniamo un valore alle costanti.
omega1=1.6*(2*pi); %rad/s (pari alla pulsazione di taglio) A2=0; omega2=0; Vogliamo visualizzare l’ingresso e l’uscita del filtro, ed i relativi spettri di potenza figure(1) plot(tout,out(:,1),'k',tout,out(:,2),'k--'),grid, title('Segnale di ingresso V_{in} e segnale di uscita V_{out}'), xlabel('Tempo [s]'), legend('V_{in}','V_{out}') axis([ ]) ZOOM
; %rad/s (pari alla pulsazione di taglio) A2=0; omega2=0; Vogliamo visualizzare l’ingresso e l’uscita del filtro, ed i relativi spettri di potenza. figure(1) plot(tout,out(:,1), k ,tout,out(:,2), k-- ),grid, title( Segnale di ingresso V_{in} e segnale di uscita V_{out} ), xlabel( Tempo [s] ), legend( V_{in} , V_{out} ) axis([ ]) ZOOM.")
48
Si salvi nella cartella di lavoro il seguente codice nel file spettro
Si salvi nella cartella di lavoro il seguente codice nel file spettro.m function spettro(t,x,n) % calcolo del vettore delle frequenze f=0:1/t(length(t)):1/t(2); f=f'; % calcolo della Fast Fourier Transform Y=fft(x); % calcolo dello densità spettrale di potenza normalizzato % che permette di ottenere un'ampiezza unitaria dello spettro % per una sinusoide di ampiezza unitaria P=2*abs(Y)/length(Y); % creazione grafico nella finestra n-esima figure(n), plot(f(1:ceil(length(f)/2)),P(1:ceil(length(P)/2))) xlabel('Frequenza [Hz]') ylabel('X(j2 \pi f)') title('Spettro di potenza normalizzato') La funzione spettro riceve come argomenti, nell’ordine: il vettore dei tempi, il vettore del segnale, ed il numero della finestra nella quale tracciare il diagramma
 % calcolo del vettore delle frequenze. f=0:1/t(length(t)):1/t(2); f=f ; % calcolo della Fast Fourier Transform. Y=fft(x); % calcolo dello densità spettrale di potenza normalizzato. % che permette di ottenere un ampiezza unitaria dello spettro. % per una sinusoide di ampiezza unitaria. P=2*abs(Y)/length(Y); % creazione grafico nella finestra n-esima. figure(n), plot(f(1:ceil(length(f)/2)),P(1:ceil(length(P)/2))) xlabel( Frequenza [Hz] ) ylabel( X(j2 \pi f) ) title( Spettro di potenza normalizzato ) La funzione spettro riceve come argomenti, nell’ordine: il vettore dei tempi, il vettore del segnale, ed il numero della finestra nella quale tracciare il diagramma.")
49
Ora si può utilizzare la funzione spettro() per produrre i grafici desiderati
>>spettro(tout,out(:,1),1), axis([ ]) >>spettro(tout,out(:,2),2), axis([ ]) Vin Vout
,1), axis([ ]) >>spettro(tout,out(:,2),2), axis([ ]) Vin. Vout.")
50
Per ottenere uno spettro maggiormente fedele a quello, ideale, a larghezza nulla, si deve aumentare il tempo di simulazione. Vin Vout Tsim=100 Vin Vout Tsim=10

51
Si salvi nella cartella di lavoro il seguente codice nel file spettro2
Si salvi nella cartella di lavoro il seguente codice nel file spettro2.m function [freq data]=spettro2(t,x) % calcolo del vettore delle frequenze f=0:1/t(length(t)):1/t(2); f=f'; % calcolo della Fast Fourier Transform Y=fft(x); % calcolo dello densità spettrale di potenza normalizzato % che permette di ottenere un'ampiezza unitaria dello spettro % per una sinusoide di ampiezza unitaria P=2*abs(Y)/length(Y); freq=f(1:ceil(length(f)/2)); data=P(1:ceil(length(P)/2)); Rispetto alla funzione spettro, la funzione spettro2 non produce il grafico, ma restituisce all’esterno i due vettori che consentono di produrre il grafico successivamente (ad esempio, all’interno di una struttura subpplot)
 % calcolo del vettore delle frequenze. f=0:1/t(length(t)):1/t(2); f=f ; % calcolo della Fast Fourier Transform. Y=fft(x); % calcolo dello densità spettrale di potenza normalizzato. % che permette di ottenere un ampiezza unitaria dello spettro. % per una sinusoide di ampiezza unitaria. P=2*abs(Y)/length(Y); freq=f(1:ceil(length(f)/2)); data=P(1:ceil(length(P)/2)); Rispetto alla funzione spettro, la funzione spettro2 non produce il grafico, ma restituisce all’esterno i due vettori che consentono di produrre il grafico successivamente (ad esempio, all’interno di una struttura subpplot)")
52
Analizziamo il seguente codice
[F,X]=spettro2(tout,out(:,1)); figure(4), subplot(2,1,1), plot(tout,out(:,1)),title('Segnale di ingresso'), xlabel(‘Tempo[s]') grid,axis([ ]) subplot(2,1,2) plot(F,X),grid xlabel('Frequenza [Hz]') ylabel('X(j2 \pi f)') title('Spettro di potenza normalizzato') axis([ ]) [F,X]=spettro2(tout,out(:,2)); figure(5), plot(tout,out(:,2)),title('Segnale di uscita'), xlabel(‘Tempo[s]')
); figure(4), subplot(2,1,1), plot(tout,out(:,1)),title( Segnale di ingresso ), xlabel(‘Tempo[s] ) grid,axis([ ]) subplot(2,1,2) plot(F,X),grid. xlabel( Frequenza [Hz] ) ylabel( X(j2 \pi f) ) title( Spettro di potenza normalizzato ) axis([ ]) [F,X]=spettro2(tout,out(:,2)); figure(5), plot(tout,out(:,2)),title( Segnale di uscita ), xlabel(‘Tempo[s] )")
53
L’output del precedente codice è il seguente
Concludiamo questo esempio puntualizzando come il modello possa essere reso completamente parametrizzabile e gestibile da script avendo cura di specificare le grandezze come la durata della simulazione, le condizioni iniziali degli integratori, il passo di discretizzazione, etc, per mezzo di costanti simboliche. Definiamo la variabile Tsim

54
Analizziamo il seguente codice
% VERIFICA CHE IL MODELLO SIA APERTO, E IN CASO CONTRARIO LO APRE if isempty(find_system('Name','filtropassabasso2')) open_system('filtropassabasso2') end A1=1; omega1=1.6*(2*pi); A2=0; omega2=0; Tsim=20; sim('filtropassabasso2'); [F,X]=spettro2(tout,out(:,1)); figure(6), subplot(4,1,1), plot(tout,out(:,1)),title('Segnale di ingresso'), xlabel('Tempo[s]') grid,axis([ ]) subplot(4,1,2) plot(F,X),grid xlabel('Frequenza [Hz]') ylabel('X(j2 \pi f)') title('Spettro di potenza normalizzato') axis([ ]) [F,X]=spettro2(tout,out(:,2)); subplot(4,1,3), plot(tout,out(:,2)),title('Segnale di uscita'), xlabel('Tempo[s]') subplot(4,1,4)
) open_system( filtropassabasso2 ) end. A1=1; omega1=1.6*(2*pi); A2=0; omega2=0; Tsim=20; sim( filtropassabasso2 ); [F,X]=spettro2(tout,out(:,1)); figure(6), subplot(4,1,1), plot(tout,out(:,1)),title( Segnale di ingresso ), xlabel( Tempo[s] ) grid,axis([ ]) subplot(4,1,2) plot(F,X),grid. xlabel( Frequenza [Hz] ) ylabel( X(j2 \pi f) ) title( Spettro di potenza normalizzato ) axis([ ]) [F,X]=spettro2(tout,out(:,2)); subplot(4,1,3), plot(tout,out(:,2)),title( Segnale di uscita ), xlabel( Tempo[s] ) subplot(4,1,4)")
55
Analizziamo il seguente codice (cont.)
omega1=3*(2*pi); A2=0; omega2=0; Tsim=20; sim('filtropassabasso2'); [F,X]=spettro2(tout,out(:,1)); figure(7), subplot(4,1,1), plot(tout,out(:,1)),title('Segnale di ingresso'), xlabel('Tempo[s]') grid,axis([ ]) subplot(4,1,2) plot(F,X),grid xlabel('Frequenza [Hz]') ylabel('X(j2 \pi f)') title('Spettro di potenza normalizzato') axis([ ]) [F,X]=spettro2(tout,out(:,2)); subplot(4,1,3), plot(tout,out(:,2)),title('Segnale di uscita'), xlabel('Tempo[s]') subplot(4,1,4)
; A2=0; omega2=0; Tsim=20; sim( filtropassabasso2 ); [F,X]=spettro2(tout,out(:,1)); figure(7), subplot(4,1,1), plot(tout,out(:,1)),title( Segnale di ingresso ), xlabel( Tempo[s] ) grid,axis([ ]) subplot(4,1,2) plot(F,X),grid. xlabel( Frequenza [Hz] ) ylabel( X(j2 \pi f) ) title( Spettro di potenza normalizzato ) axis([ ]) [F,X]=spettro2(tout,out(:,2)); subplot(4,1,3), plot(tout,out(:,2)),title( Segnale di uscita ), xlabel( Tempo[s] ) subplot(4,1,4)")
56
L’output del precedente codice è il seguente

57
% VERIFICA CHE IL MODELLO SIA APERTO, E IN CASO CONTRARIO LO APRE
if isempty(find_system('Name','filtropassabasso2')) open_system('filtropassabasso2') end R=1e4; % 10k Ohm C=1e-5; % 10 pF A1=1; omega1=1.6*(2*pi); A2=2; omega2=10*(2*pi); Tsim=20; sim('filtropassabasso2'); [F,X]=spettro2(tout,out(:,1)); figure(8), subplot(4,1,1), plot(tout,out(:,1)),title('Segnale di ingresso'), xlabel('Tempo[s]') grid,axis([ ]) subplot(4,1,2) plot(F,X),grid xlabel('Frequenza [Hz]') ylabel('X(j2 \pi f)') title('Spettro di potenza normalizzato') axis([ ]) [F,X]=spettro2(tout,out(:,2)); subplot(4,1,3), plot(tout,out(:,2)),title('Segnale di uscita'), xlabel('Tempo[s]') subplot(4,1,4) 2 armoniche distinte
) open_system( filtropassabasso2 ) end. R=1e4; % 10k Ohm. C=1e-5; % 10 pF. A1=1; omega1=1.6*(2*pi); A2=2; omega2=10*(2*pi); Tsim=20; sim( filtropassabasso2 ); [F,X]=spettro2(tout,out(:,1)); figure(8), subplot(4,1,1), plot(tout,out(:,1)),title( Segnale di ingresso ), xlabel( Tempo[s] ) grid,axis([ ]) subplot(4,1,2) plot(F,X),grid. xlabel( Frequenza [Hz] ) ylabel( X(j2 \pi f) ) title( Spettro di potenza normalizzato ) axis([ ]) [F,X]=spettro2(tout,out(:,2)); subplot(4,1,3), plot(tout,out(:,2)),title( Segnale di uscita ), xlabel( Tempo[s] ) subplot(4,1,4) 2 armoniche distinte.")
58
L’output del precedente codice è il seguente

59
Filtraggio digitale Molto importante nei sistemi di acquisizione dati
Es. Un filtro digitale del primo ordine rappresenta una implementazione discreta del filtro passa-basso studiato nell’esempio precedente = costante di tempo del filtro Ts = passo di campionamento della sequenza di input

60
Schema SIMULINK A1=1; omega1=2*(2*pi); Tc=0.01; tau=0.1; a1=exp(-Tc/tau) b0=1-exp(-Tc/tau) Per ruotare di 90° un blocco lo si deve selezionare e si devono premere successivamente i tasti CTRL + R Blocco UNIT DELAY (libreria discrete)
")
61
A1=1; omega1=2*(2*pi); Tc=0.01; tau=0.1; a1=exp(-Tc/tau) b0=1-exp(-Tc/tau)
; Tc=0.01; tau=0.1; a1=exp(-Tc/tau) b0=1-exp(-Tc/tau)")
62
Implementazione del filtraggio digitale in Matlab
clear all close all clc Tc=0.01; tau=0.1; a1=exp(-Tc/tau);a2=0; b0=1-exp(-Tc/tau);b1=0; ordine=2; t=0:0.01:20; y=sin(t); rum=0.1*rand(1,length(t)); y_rum=y+rum; figure(1) plot(t,y); grid,title('segnale senza rumore') figure(2) plot(t,rum); grid,title('rumore') figure(3) plot(t,y_rum); grid,title('segnale rumoroso') yf=zeros(1,length(t)); for i=(ordine+1):length(t) yf(i)=a1*yf(i-1)+a2*yf(i-2)+b0*y_rum(i)+b1*y_rum(i-1)+; end figure(4) plot(t,yf); grid,title('segnale FILTRATO ') Implementazione del filtraggio digitale in Matlab
;a2=0; b0=1-exp(-Tc/tau);b1=0; ordine=2; t=0:0.01:20; y=sin(t); rum=0.1*rand(1,length(t)); y_rum=y+rum; figure(1) plot(t,y); grid,title( segnale senza rumore ) figure(2) plot(t,rum); grid,title( rumore ) figure(3) plot(t,y_rum); grid,title( segnale rumoroso ) yf=zeros(1,length(t)); for i=(ordine+1):length(t) yf(i)=a1*yf(i-1)+a2*yf(i-2)+b0*y_rum(i)+b1*y_rum(i-1)+; end. figure(4) plot(t,yf); grid,title( segnale FILTRATO ) Implementazione del filtraggio digitale in Matlab.")
63
Ora simuliamo un sistema termico
Consideriamo un sistema termico rappresentato da un volume V circondato da una parete e contenente un gas Sia Te(t) [K] la temperatura esterna alla parete, Tf(t) [K] la temperatura del gas interno al volume, e q(t) [J/s] una sorgente di calore interna al volume. Sia Cf [J/K] la capacita termica del fluido, e sia Kie (J/K s) il coefficiente di scambio termico tra interno ed esterno.
 [K] la temperatura esterna alla parete, Tf(t) [K] la temperatura del gas interno al volume, e q(t) [J/s] una sorgente di calore interna al volume. Sia Cf [J/K] la capacita termica del fluido, e sia Kie (J/K s) il coefficiente di scambio termico tra interno ed esterno.")
64
Per tradurre una equazione differenziale in termini di una combinazione tra blocchi Simulink si deve esplicitare l’equazione differenziale rispetto alle derivate di ordine piu elevato. Con un blocco integratore (Integrator) e con dei blocchi “Constant” e “Gain” si può realizzare il seguente modello di simulazione che ipotizza dei valori costanti per q e Te Si noti come all’ingresso dell’integratore, punto cui corrisponde il segnale dTf/dt, venga “costruita” elemento per elemento la formula
 e con dei blocchi Constant e Gain si può realizzare il seguente modello di simulazione che ipotizza dei valori costanti per q e Te. Si noti come all’ingresso dell’integratore, punto cui corrisponde il segnale dTf/dt, venga. costruita elemento per elemento la formula.")
65
Per eseguire la simulazione bisogna assegnare un valore ai parametri Cf [J/K] e Kfe [J/Ks], alla condizione iniziale Tf(0), ed al valore costante dei segnali Te e q. La condizione iniziale dell’integratore si specifica nella relativa finestra di dialogo Script di parametrizzazione Tf_zero=298.16; %[K], pari a 25°C q=2000; % J/s Te=323.16; %[K], pari a 50°C; Cf=2e3; % J/K Kie=1e2; % J / K s
![Per eseguire la simulazione bisogna assegnare un valore ai parametri Cf [J/K] e Kfe [J/Ks], alla condizione iniziale Tf(0), ed al valore costante dei segnali Te e q.](http://slideplayer.it/slide/2466358/8/images/65/Per+eseguire+la+simulazione+bisogna+assegnare+un+valore+ai+parametri+Cf+%5BJ%2FK%5D+e+Kfe+%5BJ%2FKs%5D%2C+alla+condizione+iniziale+Tf%280%29%2C+ed+al+valore+costante+dei+segnali+Te+e+q..jpg "La condizione iniziale dell’integratore si specifica nella relativa finestra di dialogo. Script di parametrizzazione. Tf_zero=298.16; %[K], pari a 25°C. q=2000; % J/s. Te=323.16; %[K], pari a 50°C; Cf=2e3; % J/K. Kie=1e2; % J / K s.")
66
Si desidera visualizzare Tf sia in gradi Kelvin che in gradi centigradi in 2 finestre Scope separate. La conversione da °K a °C può essere realizzata con il blocco Fcn (libreria User Defined Functions Il blocco Fcn consente di realizzare una funzione statica tra un parametro di ingresso (scalare o vettoriale) e un parametro di uscita scalare. Si deve scrivere l’espressione della funzione, denotando con u (parola riservata) la variabile in ingresso al blocco Si desidera anche modificare il profilo di q(t) Si può utilizzare il blocco Step, libreria Sources. t q q(t) 100
 e un parametro di uscita scalare. Si deve scrivere l’espressione della funzione, denotando con u (parola riservata) la variabile in ingresso al blocco. Si desidera anche modificare il profilo di q(t) Si può utilizzare il blocco Step, libreria Sources. t. q. q(t) 100.")
67
Si realizzi lo schema seguente
Grafico della temperatura Tf in gradi centigradi

68
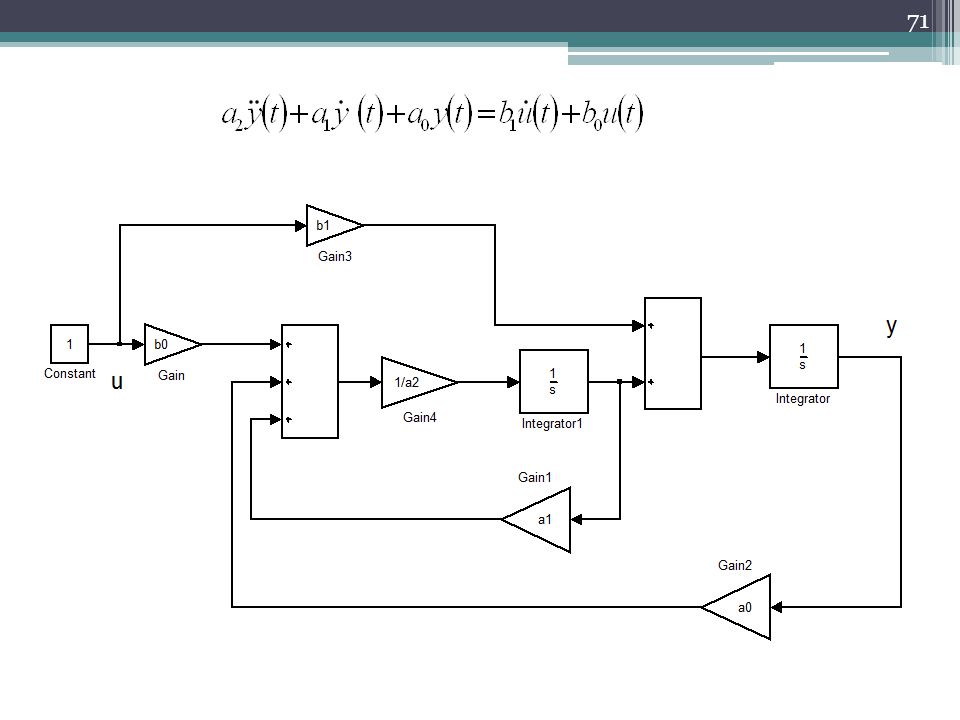
Realizziamo lo stesso modello in maniera più compatta, utilizzando il blocco “Transfer Function” (libreria Continuous). Trasformiamo secondo Laplace l’equazione differenziale Notazione impropria, ma chiara Schema a blocchi Schema Simulink compatto + + q(t)
")
69
Parametrizzazione del blocco Transfer Function
Il blocco deve rappresentare la Funz. di Trasf. Si devono specificare i coefficienti dei polinomi a numeratore e denominatore della FdT utilizzando la notazione Matlab per la rappresentazione dei polinomi (un vettore che contiene i coefficienti dl polinomio in ordine decrescente rispetto alle potenze di s) Si può “aggirare” la trasformazione secondo Laplace ragionando sui coefficienti della equazione differenziali
 Si può aggirare la trasformazione secondo Laplace ragionando sui coefficienti della equazione differenziali.")
70
FdT del secondo ordine

72
Obbiettivi aggiuntivi
Far variare nel tempo la temperatura esterna ed osservare le corrispondenti fluttuazioni della temperatura interna Nell’ipotesi che q(t) possa assumere solo due valori (il valore nullo q=0, ed un valore costante q=Q* ) realizzare un sistema di controllo ON-OFF per regolare ad un valore desiderato la temperatura del fluido interno al volume Confrontare i risultati ottenuti impiegando come controllore un rele’ con e senza isteresi
 possa assumere solo due valori (il valore nullo q=0, ed un valore costante q=Q* ) realizzare un sistema di controllo ON-OFF per regolare ad un valore desiderato la temperatura del fluido interno al volume. Confrontare i risultati ottenuti impiegando come controllore un rele’ con e senza isteresi.")
73
FILE: termico1dof_feedback.mdl
Schema SIMULINK FILE: termico1dof_feedback.mdl Tf_zero=298; %[K], pari a 25°C q=2000; % J/s Te=323; %[K], pari a 50°C; Cf=2e3; % J/K Kie=1e2; % J / K s

74
Sistema a ciclo aperto

75
Ampiezza isteresi = 4°C Ampiezza isteresi = 2°C

76
Complichiamo il modello
Trattiamo in maniera distinta gli accumuli termici nel volume e nella parte di contorno. Definiamo quindi un modello più complesso che mi fornisca anche l’evoluzione temporale della temperatura della parete Tp(t). temperatura della parete Cf [J/K] è la capacita termica del gas interno al volume Cp [J/K] è la capacita termica del materiale che costituisce la parete Kip [J/K s] è il coefficiente di scambio termico tra l’interno del volume e la parete. Kpe [J/K s] è il coefficiente di scambio termico tra la parete e l’esterno.
. temperatura della parete. Cf [J/K] è la capacita termica del gas interno al volume. Cp [J/K] è la capacita termica del materiale che costituisce la parete. Kip [J/K s] è il coefficiente di scambio termico tra l’interno del volume e la parete. Kpe [J/K s] è il coefficiente di scambio termico tra la parete e l’esterno.")
77
Esplicitiamo il sistema di equazioni rispetto alle derivate di ordine più elevato
Importiamo nella pagina di lavoro un ulteriore blocco integratore la cui uscita sarà la temperatura Tp della parete. Utilizziamo anche un visualizzatore a Display (libreria Sinks) Lo schema può essere realizzato come segue
 Lo schema può essere realizzato come segue.")
78
Script di configurazione dei parametri
Tf_zero= ; %[K], pari a 25°C Tp_zero= ; %[K], pari a 10°C Cf=2e3; % J/K Cp=10e3; % J/K Kip=1e2; % J/K s Kpe=1e2; % J/K s q=2000; % J/s Te= %[K], pari a 20°C; Risultati della simulazione

79
File “dati_problema.dat”
Si desidera acquisire il segnale q(t) da un file esterno. Il segnale q(t) sia disponibile nella forma di un file dati di tipo ASCII File “dati_problema.dat” La prima riga riporta i tempi e la seconda riporta il valore del segnale Bisogna creare un mat-file (lo chiamiamo dati_mat.mat) che contenga tali informazioni. %clear all load dati_problema.dat M=dati_problema; tempi=M(1,:); %non utilizzato segnale=M(2,:); %non utilizzato save dati_mat M %si puo’ fare direttamente >> save dati_mat dati_problema Tf_zero=298.16; %[K], pari a 25°C Tp_zero= ; %[K], pari a 10°C Cf=2e3; % J/K Cp=10e3; % J/K Kip=1e2; % J/K s Kpe=1e2; % J/K s q=2000; % J/s Te= ; %[K], pari a 20°C;
 da un file esterno. Il segnale q(t) sia disponibile nella forma di un file dati di tipo ASCII. File dati_problema.dat La prima riga riporta i tempi e la seconda riporta il valore del segnale. Bisogna creare un mat-file (lo chiamiamo dati_mat.mat) che contenga tali informazioni. %clear all. load dati_problema.dat. M=dati_problema; tempi=M(1,:); %non utilizzato. segnale=M(2,:); %non utilizzato. save dati_mat M %si puo’ fare direttamente >> save dati_mat dati_problema. Tf_zero=298.16; %[K], pari a 25°C. Tp_zero= ; %[K], pari a 10°C. Cf=2e3; % J/K. Cp=10e3; % J/K. Kip=1e2; % J/K s. Kpe=1e2; % J/K s. q=2000; % J/s. Te= ; %[K], pari a 20°C;")
80
Per importare il segnale si può utilizzare il blocco Simulink “From File”, dalla libreria Sources
Schema Simulink In accordo con i dati acquisiti, la durata della simulazione deve essere posta pari a 2.

81
Creazione di sottosistemi
Si vuole rendere più compatta la rappresentazione del modello attraverso la definizione di un macroblocco come in figura Simulink consente di definire dei macroblocchi (sottosistemi) che rappresentano una particolare interconnessione tra altri blocchi, alla quale si accede esplorando il contenuto del sottosistema.
 che rappresentano una particolare interconnessione tra altri blocchi, alla quale si accede esplorando il contenuto del sottosistema.")
82
Creazione di sottosistemi
Si dispongano i blocchi del modello come in figura, in modo che sia possibile tracciare un rettangolo nel quale entrano i segnali di input del sottosistema e dal quale escono i segnali di output.

83
Con il mouse si deve “tracciare” nella pagina di lavoro un rettangolo come quello nella slide precedente. Poi, dal menu Edit della pagina di lavoro Simulink, si deve selezionare il comando Create Subsystem Ridisponendo i blocchi dello schema si puo realizzare la seguente configurazione Cliccando sul blocco Subsystem si accede al suo contenuto. Si notino i blocchi “In1”, “In2” , “Out1” ed “Out2”

84
Rinominando i blocchi “In1”, “In2”, “Out1” ed “Out2” si può fare in modo che nelle porte di input e di Output del Subsystem compaia il nome della grandezza associata La parametrizzazione del modello è attualmente effettuata per mezzo del file di script precedentemente illustrato, che assegna una valore alle costanti simboliche usate nel modello Simulink definendo opportune variabili omologhe nel workspace di Matlab. Tale m-file di script deve sempre accompagnare il file Simulink (che ha estensione .mdl) e deve essere lanciato prima di quest’ultimo Può essere conveniente disporre di una maschera di parametrizzazione interna al modello Simulink. In questo modo tutte le informazioni associate al modello sono contenute in un unico file (il file .mdl) e la riparametrizzazione del modello avviene in maniera più semplice, senza dovere ogni volta rilanciare il file script con estensione .m
 e deve essere lanciato prima di quest’ultimo. Può essere conveniente disporre di una maschera di parametrizzazione interna al modello Simulink. In questo modo tutte le informazioni associate al modello sono contenute in un unico file (il file .mdl) e la riparametrizzazione del modello avviene in maniera più semplice, senza dovere ogni volta rilanciare il file script con estensione .m.")
85
Creazione di MASK Bisogna portarsi con il mouse sul Subsystem “Camera di Combustione”, premere il tasto destro del mouse, e selezionare Mask Subsystem dal menu che compare

86
Dopo avere selezionato Mask Subsystem si deve nuovamente portarsi con il mouse sul Subsystem “Camera di Combustione”, premere il tasto destro del mouse, e selezionare stavolta Edit Mask dal menu che compare. Finestra di configurazione della mask Andare nel sottomenù: Parameters

87
Nel sottomenù Parameters completare le voci “Dialog Parameters” come in Figura, creando una riga per ognuno dei 6 parametri da settare . Pulsante “Add” Aggiunge una riga. Per ciascun parametro , oltre al nome della relativa variabile (Cf, Cp, …) si può riportare una frase descrittiva che comparirà nella maschera di configurazione, che riportiamo nella slide seguente.
 si può riportare una frase descrittiva che comparirà nella maschera di configurazione, che riportiamo nella slide seguente.")
88
FILE: termico_2dof_matfile_mask01.mdl
Maschera di parametrizzazione del Subsystem Viene visualizzata facendo doppio click sul blocco Simulink del Sottosistema E’ possibile inserire manualmente il valore dei parametri nelle opportune caselle di testo. I valori inseriti vengono memorizzati al salvataggio del file, e riproposti alla sua riapertura. Per accedere al contenuto del blocco “mascherato” premere il tasto destro del mouse e poi selezionare “Look Under Mask” Script semplificato %clear all load dati_problema.dat M=dati_problema; tempi=M(1,:); %non utilizzato segnale=M(2,:); %non utilizzato save dati_mat M q=2000; % J/s Te= ; %[K], pari a 20°C; FILE: termico_2dof_matfile_mask01.mdl
; %non utilizzato. segnale=M(2,:); %non utilizzato. save dati_mat M. q=2000; % J/s. Te= ; %[K], pari a 20°C; FILE: termico_2dof_matfile_mask01.mdl.")
89
FILE: termico_2dof_matfile_mask02.mdl
Si inserisca una ulteriore mask che consenta l’impostazione manuale di q e Te FILE: termico_2dof_matfile_mask02.mdl Script %clear all load dati_problema.dat M=dati_problema; tempi=M(1,:); %non utilizzato segnale=M(2,:); %non utilizzato save dati_mat M
; %non utilizzato. segnale=M(2,:); %non utilizzato. save dati_mat M.")
90
r Un processo termico a parametri distribuiti statore rotore
Cilindro cavo. Parti grigie in acciaio. Parte bianca: volume con vapore ad alta temperatura. Parte nera: piccolo volume interno statore r rotore Coordinata radiale Es. Sezione di una turbina a vapore

91
Es. Sezione di una turbina a vapore

92
Ipotesi: simmetria angolare della distribuzione di temperatura
Si desidera calcolare la distribuzione di temperatura nel rotore (in uno dei suoi raggi) Mediante misure acquisite in una turbina in esercizio, si suppone nota la temperatura nella “parte bianca” (regione del vapore in alta temperatura) In una modellazione più dettagliata, si potrebbe essere interessati a valutare la distribuzione di temperatura nella superficie delle pale di rotore, onde valutare gli stress termici sui materiali. Problema complesso (anche nella formulazione semplificata sotto esame) perche il modello matematico è una equazione alle derivate parziali (sistema a parametri distribuiti, sistema infinito-dimensionale)
 Mediante misure acquisite in una turbina in esercizio, si suppone nota la temperatura nella parte bianca (regione del vapore in alta temperatura) In una modellazione più dettagliata, si potrebbe essere interessati a valutare la distribuzione di temperatura nella superficie delle pale di rotore, onde valutare gli stress termici sui materiali. Problema complesso (anche nella formulazione semplificata sotto esame) perche il modello matematico è una equazione alle derivate parziali (sistema a parametri distribuiti, sistema infinito-dimensionale)")
93
Eq. di diffusione (Equazione del calore) monodimensionale in coord
Eq. di diffusione (Equazione del calore) monodimensionale in coord. cilindriche , con unica variabile spaziale la coordinata cilindrica radiale r è il coefficiente di diffusione [m2/s] è la capacita termica a pressione costante per unita di massa [J/gK] è la conduttività termica [J/K s m] è la densità [g /m3 ]
 monodimensionale in coord. cilindriche , con unica variabile spaziale la coordinata cilindrica radiale r. è il coefficiente di diffusione [m2/s] è la capacita termica a pressione costante per unita di massa [J/gK] è la conduttività termica [J/K s m] è la densità [g /m3 ]")
94
r =0

95
Approssimazione delle derivate spaziali mediante differenze finite
Sistema di ODE

96
Sistema di ODE … Boundary conditions

97
Condizioni iniziali

98
Modello Simulink FILES TurbinaVapore01.mdl T_centrorotore.mat T_vapor.mat Esportazione dati verso il Workspace Contenuto del Subsystem “Modello termico Rotore” Due diverse modalità di specificare i due segnali di input. Linee spesse che rappresentano segnali multidimensionali

99
Sistema LTI (Linear Time Invariant) MIMO (multi-input-multi-output)
Uso di Matrix Gain Integratore saturato

100
Parametrizzazione del modello
Utilizziamo una mask

101
Costruzione della maschera di parametrizzazione

102
Calcolo delle Matrici A e B

103
Codice copiabile ed seguibile Matrici A e B (per n = 6) n=40;
r_min=0.05; r_max=0.392; rho=7900; C=0.45; k=73; T_in=80; h=(r_max-r_min)/n; K=k/(rho*C*1e3)/h^2; A=zeros(n,n);B=zeros(n,2); for i=1:n, A(i,i)=-(2+h/(r_min+i*h)); end for j=1:n-1, A(j,j+1)=1+h/(r_min+j*h); A(j+1,j)=1; B(1,1)=1;B(n,2)=1+h/r_max; A=K*A; B=K*B;
/n; K=k/(rho*C*1e3)/h^2; A=zeros(n,n);B=zeros(n,2); for i=1:n, A(i,i)=-(2+h/(r_min+i*h)); end. for j=1:n-1, A(j,j+1)=1+h/(r_min+j*h); A(j+1,j)=1; B(1,1)=1;B(n,2)=1+h/r_max; A=K*A; B=K*B;")
104
Documentation - descrizione della MASK

105
Analisi dei risultati Impostiamo preliminarmente due valori costanti per le temperature al contorno Profili temporali degli elementi del vettore T Uscita del blocco Scope “T”

106
Profilo di temperatura al nodo 40

107
Con dei profili differenti per le boundary conditions, l’evoluzione del profilo di temperatura è differente. Ora processiamo in Matlab i risultati della simulazione, creando dei grafici 3D. r_min=0.05; r_max=0.392; n=40; [X,Y] = meshgrid(linspace(r_min,r_max,n),tout); h=mesh(X,Y,Trot) title('Distribuzione temperatura rotore.') xlabel('Coordinata radiale r [m] ','FontName','times','FontSize',14) ylabel('Tempo [s]','FontName','times','FontSize',14) zlabel('T(r,t)','FontName','times','FontSize',14) set(gca,'FontSize',14,'FontName','Times')
,tout); h=mesh(X,Y,Trot) title( Distribuzione temperatura rotore. ) xlabel( Coordinata radiale r [m] , FontName , times , FontSize ,14) ylabel( Tempo [s] , FontName , times , FontSize ,14) zlabel( T(r,t) , FontName , times , FontSize ,14) set(gca, FontSize ,14, FontName , Times )")
108
Invertiamo la direzione dell’asse dei tempi

109
Completiamo questo esempio mostrando l’impiego, nella Mask, di variabili di configurazione tipo “popup” o “checkbox” e un loro possibile impiego. Si apportino le seguenti modifiche alla lista dei Parameters

110
Si apportino le seguenti modifiche alle istruzioni di Initialization

111
Si apportino le seguenti modifiche allo schema Simulink
Ora si esegua il modello con diverse scelte per le variabili pop up e checkbox, e si analizzino i risultati. FILES: TurbinaVapore02.mdl T_centrorotore.mat T_vapor.mat

112
Anti-lock bracking system (ABS)
Simulazione di un sistema di frenatura con ABS Modello quarto di veicolo = velocità ruota Rr = raggio ruota I = inerzia ruota = forza da interazione pneumatico/strada = coppia frenante s = scorrimento Sistema dinamico NON LINEARE, del secondo ordine Caratteristica -s nota in forma tabellare

113
Modello SIMULINK Lookup Table
Blocco Fcn per il calcolo dello scorrimento clear all g = 9.81; v0 = 40; % velocita iniziale (m/s) Rr = 0.6; % raggio m = 200; % massa J = 5; % inerzia % Curva mu-slip slip = 0:.05:1.0; mu = [ ]; Stop a veicolo fermo
 Rr = 0.6; % raggio. m = 200; % massa. J = 5; % inerzia. % Curva mu-slip. slip = 0:.05:1.0; mu = [ ]; Stop a veicolo fermo.")
114
Interrompe la simulazione quando il veicolo si ferma
Lookup Table (libreria Lookup Tables) La caratteristica viene disegnata sulla maschera del blocco Blocco Stop Simulation (libreria Sinks ) Interrompe la simulazione quando il veicolo si ferma Integratori saturati
 La caratteristica viene disegnata sulla maschera del blocco. Blocco Stop Simulation. (libreria Sinks ) Interrompe la simulazione quando il veicolo si ferma. Integratori saturati.")
115
Dettaglio sulla parte che interrompe la simulazione

116
Integratori saturati Soluzione semplificata per interrompere la simulazione quando il veicolo si ferma

117
Ora modelliamo l’ABS La dinamica del sistema di frenatura idraulico è approssimata da un filtro del primo ordine (dinamica cassetti distributori) e da un integratore saturato (pressurizzazione). Il controllo è un relè (controllo bang-bang). L’apposito blocco Relay si trova nella libreria Discontinuities Kf = 3; %guadagno PBmax = 1500; % saturazione TB = 0.01; %costante di tempo
 e da un integratore saturato (pressurizzazione). Il controllo è un relè (controllo bang-bang). L’apposito blocco Relay si trova nella libreria Discontinuities. Kf = 3; %guadagno. PBmax = 1500; % saturazione. TB = 0.01; %costante di tempo.")
118
FILES: ABS_OpenClosedLoop.mdl ABS_OpenClosedLoop_DATI.m Modello complessivo E’ stato aggiunto un blocco “Manual Switch” (libreria Signal Routing) per poter simulare una frenatura non controllata (Tf=-1000). Eseguiamo una simulazione, e visualizziamo i risultati nei blocchi Scope
 per poter simulare una frenatura non controllata (Tf=-1000). Eseguiamo una simulazione, e visualizziamo i risultati nei blocchi Scope.")
119
Frenatura non controllata (ABS disattivato)
Il pneumatico si blocca dopo 1.5 secondi circa, mentre la marcia del veicolo continua per altri 4 secondi. Lo scorrimento diventa unitario quando il pneumatico si blocca

120
Frenatura con ABS attivato
Il pneumatico ora si blocca solo nell’ultima parte della frenata. Il bloccaggio del pneumatico avviene quando ormai la velocita di marcia del veicolo è prossima a zero, la marcia del veicolo si arresta infatti dopo pochi decimi di secondo. Lo scorrimento viene regolato attorno al set point desiderato 0.2. diventando unitario solo a frenata ormai conclusa. Nella prossima slide si confrontano due diversi test del sistema ABS con una diversa velocita di marcia iniziale V0.

121
Con ABS v0 = 40 m/s 145 km/h Con ABS v0 = 70 m/s 250 km/h

122
Variare il controllo sul FUEL (Subsystem Control)
Osservare la velocità dell’albero motore in RPM, e correlarne le variazioni ai corrispondenti incrementi e decrementi del fuel rate

123
Embedded Matlab Function block
Consideriamo nuovamente il sistema termico del secondo ordine temperatura della parete

124
FILE: termico_2dof_matfile_mask01_EMF.mdl
Realizziamo il modello SIMULINK in maniera differente, generando i segnali q e Te con dei blocchi Signal Builder (libreria Sources) ….. FILE: termico_2dof_matfile_mask01_EMF.mdl
 ….. FILE: termico_2dof_matfile_mask01_EMF.mdl.")
125
….. e realizzando le equazioni per mezzo di un blocco Emdebbed MATLAB Function (EMF)
Integratore “vettoriale” (bidimensionale) y = uscite u = ingressi p = parametri
 y = uscite. u = ingressi. p = parametri.")
126
Il blocco Camera di Combustione conserva la medesima maschera della implementazione precedente

127
Codice analogo a quello di un Function file
Codice del blocco EMF function ydot = fcn(y,u,p) Cf=p(1); Cp=p(2); Kip=p(3); Kpe=p(4); q=u(1); Te=u(2); Tf=y(1); Tp=y(2); Tfdot=q/Cf+(Kip/Cf)*(Tp-Tf); Tpdot=(Kpe/Cp)*(Te-Tp)-(Kip/Cp)*(Tp-Tf); ydot=[Tfdot Tpdot]; Variabili globali non concesse all’interno di blocchi EMF. I parametri della mask non sono direttamente accessibili da parte della EMF Codice analogo a quello di un Function file
 Cf=p(1); Cp=p(2); Kip=p(3); Kpe=p(4); q=u(1); Te=u(2); Tf=y(1); Tp=y(2); Tfdot=q/Cf+(Kip/Cf)*(Tp-Tf); Tpdot=(Kpe/Cp)*(Te-Tp)-(Kip/Cp)*(Tp-Tf); ydot=[Tfdot Tpdot]; Variabili globali non concesse. all’interno di blocchi EMF. I parametri della mask non sono direttamente accessibili da parte della EMF. Codice analogo a quello di un Function file.")
128
Parametrizzazione dei Signal Builder
Target

129
Zoom on T Spostiamo verso sinistra questa linea (dopppio click su di essa)
")
130
Spostiamo verso destra questa linea con modalita analoghe
Spostiamo verso l’alto questa linea con modalita analoghe

131
Profilo completo q(t) Profilo più complicato per q(t) Proflo piu complicato per T(t)
 Profilo più complicato per q(t) Proflo piu complicato per T(t)")
132
Non serve piu un file script in abbinamento
Risultati della simulazione

133
Modellazione di sistemi meccanici multi-body
Toolbox avanzati SimMechanics Modellazione di sistemi meccanici multi-body

134
Modello 3D

135
Vista differente

136
Toolbox avanzati SimDriveline Animazione 3D Componenti e modelli
area automotive Animazione 3D

Presentazioni simili




>")







>")






