Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Visione e Percezione progetto conclusivo “Human recognition : A BIOMETRICAL APPROACH ” Simone Balsanelli Adriano Cerocchi

2
Perché l’approccio Biometrico PCA vs Biometria Biometria privilegia le features invarianti Attraverso la biometria è possibile scegliere le features e successivamente raffinare l’algoritmo per la loro ricerca Il risultato migliore si ha da una sinergia dei due metodi

3
Assunzioni Le foto scattate contengono l’intero volto Il volto è posto pressoché perpendicolare al piano della coppia di camere Non sono state fatte altre assunzioni...

4
La piattaforma di acquisizione

5
Caratteristiche tecniche Immagini max 640x480 Distanza circa 30 cm Si è cercato di avere gli epipoli all’infinito Buona per acquisizioni a distanza di circa 80/100 cm molto realistico

6
La calibrazione 1/2

7
La calibrazione 2/2

8
Errore di stima

9
Calcolo della distanza

11
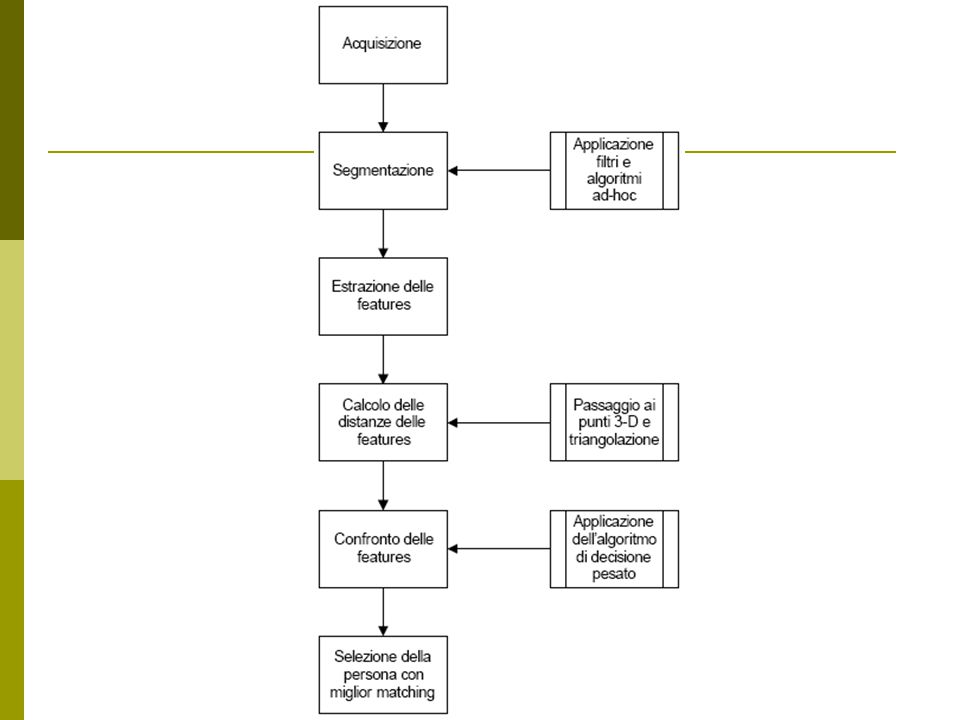
Segmentazione1/7 L’operazione di segmentazione consiste nel riconoscere feature del volto e quindi restituirne le coordinate Non sono state fatte assunzioni sulla rotazione del volto L’elemento principale dell’algoritmo è la ricerca degli occhi

12
Segmentazione2/7

13
Segmentazione 3/7 il filtro logfilt

14
Segmentazione 4/7

15
Segmentazione5/7 algoritmo di breselike

16
Segmentazione6/7

17
Segmentazione 7/7

18
Affidabilità della segmentazione Isolamento volto: 0.8 Ricerca iride: 0.45 (0.7 senza correzione) Ricerca bocca: 0.8 Ricerca naso: 0.4 Totale = 0.115 = 11.5% / 2 = 5,75% Ma senza assunzioni…e periferiche di acquisizione di bassa qualità
 Ricerca bocca: 0.8 Ricerca naso: 0.4 Totale = = 11.5% / 2 = 5,75% Ma senza assunzioni…e periferiche di acquisizione di bassa qualità")
19
Triangolazione e passaggio al modello 3D

20
Riconoscimento 1/2 Distanza interpupillare Distanza punto medio occhi – bocca Rapporto tra distanza interpupillare/distanza bocca (rapporto T) Profondità del naso stimata come differenza delle z dei punti (stima più realistica della distanza reale)
 Profondità del naso stimata come differenza delle z dei punti (stima più realistica della distanza reale)")
21
Riconoscimento 2/2 Pesi associati alle misurazioni: Distanza interpupillare: 0.4 Distanza bocca: 0.3 Rapporto tra i due: 0.2 Profondità naso: 0.1 Affidabilità dell’algoritmo = 0.7

22
Possibili evoluzioni1 Migliorare i dispositivi di acquisizione

23
Possibili evoluzioni2 Warping (rettificazione)
")
24
Possibili evoluzioni3 Assunzioni più stringenti Posizione della persona Illuminazione Sfondo fisso Video anziché foto

25
Conclusioni Affidabilità bassa? Fattore relativo! Maggior discriminante: le telecamere Il sistema è molto veloce già all’interno di Matlab: tra i 5 e i 10 secondi per riconoscere Il sistema ha complessità temporale invariante alle migliorie Il sistema ha parametri che evidenziano la correttezza del riconoscimento: sistema robusto! Sistema flessibile per rielaborazioni

26
Any questions

27
“The mere formulation of a problem is far more often essential than its solution, which may be merely a metter or mathematical or experimental skill”

Presentazioni simili







: variabili non deterministiche sottoposte a errore di misura. Es. coordinate.>")









 Studenti: Damaggio Elettra Firmani Donatella.>")

