Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Prof. Filippo D’Ippolito
UNIVERSITA’ DEGLI STUDI DI PALERMO Anno Accademico 2013/2014 CONTROLLI AUTOMATICI (6 CFU) Prof. Filippo D’Ippolito TESTI DI RIFERIMENTO P. Bolzern, R. Scattolini, N. Schiavoni, Fondamenti di Controlli Automatici, 3ed, McGrawHill, Milano, 2008. M. Basso, L. Chisci, P. Falugi, Fondamenti di Automatica, Città Studi.
 Prof. Filippo D’Ippolito. TESTI DI RIFERIMENTO. P. Bolzern, R. Scattolini, N. Schiavoni, Fondamenti di Controlli Automatici, 3ed, McGrawHill, Milano, M. Basso, L. Chisci, P. Falugi, Fondamenti di Automatica, Città Studi.")
2
Esempi di Sistemi di Controllo
Il regolatore di WATT James Watt ( )
")
3
Esempi di Sistemi di Controllo:
Distanza automatica tra veicoli

4
Esempi di Sistemi di Controllo
Diagnosi dei guasti

5
Esempi di Sistemi di Controllo
Controllo a microprocessore

6
Teoria dei Sistemi “La teoria dei sistemi affronta lo studio delle proprietà dei modelli matematici associati ai sistemi e dei problemi connessi con la loro deduzione e utilizzazione”

7
Concetto di sistema "Un sistema è una combinazione di componenti che operano insieme per svolgere una funzione non realizzabile con nessuno di essi presi individualmente". (The IEEE Standard Dictionary of Electrical and Electronics Terms) In particolare: un sistema consiste di un insieme di componenti interagenti; ad un sistema è associata la funzione che esso deve svolgere; i componenti di un sistema non sono necessariamente oggetti fisici.
 In particolare: un sistema consiste di un insieme di componenti interagenti; ad un sistema è associata la funzione che esso deve svolgere; i componenti di un sistema non sono necessariamente oggetti fisici.")
8
Sistemi orientati Sistema orientato Modello di un sistema
Definisce gli aspetti quantitativi del sistema: descrizione matematica del suo comportamento (legami funzionali che sussistono tra le grandezze d'interesse del sistema stesso). Sistemi orientati Sistema orientato Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
. Sistemi orientati. Sistema orientato. Illustrazioni dal testo Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni) per gentile concessione degli Autori.")
9
Ingresso: tensione applicata vR(t)
Esempio 1 Ingresso: tensione applicata vR(t) Uscita: corrente elettrica i(t) legame funzionale u(t) = vR(t) e y(t) = i(t) y(t) = u(t)/R
 Uscita: corrente elettrica i(t) legame funzionale. u(t) = vR(t) e y(t) = i(t) y(t) = u(t)/R.")
10
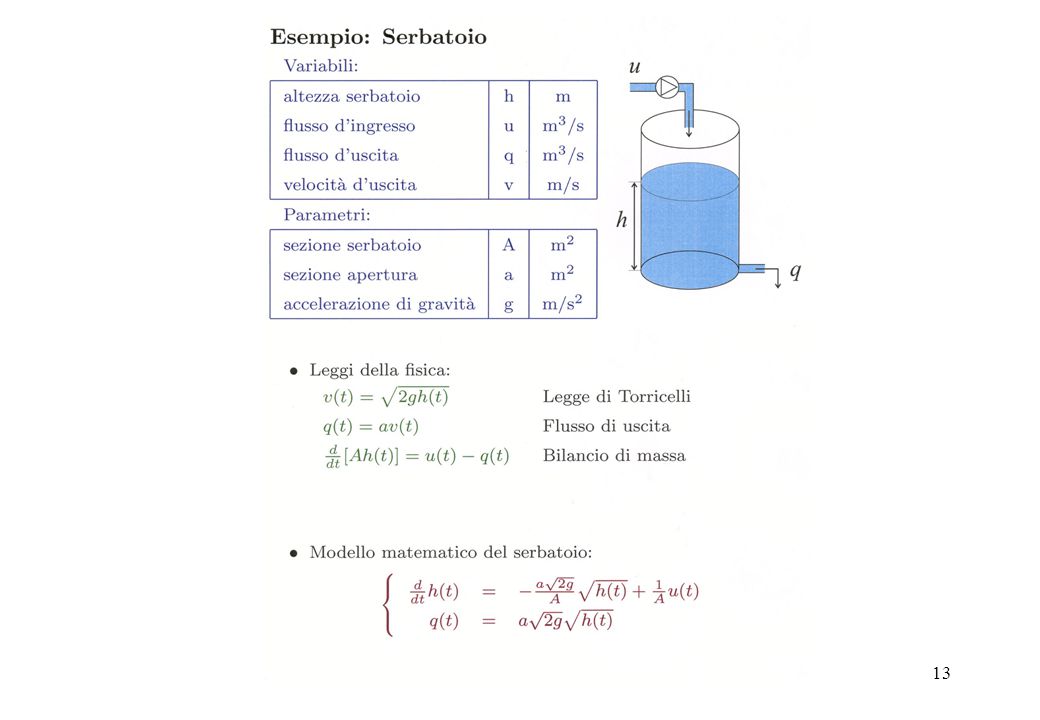
Esempio 2 Legamefunzionale
Ingresso: portata volumetrica q(t) della pompa Uscita: il livello h(t) del pelo libero Legamefunzionale S superficie di base del serbatoio
 della pompa. Uscita: il livello h(t) del pelo libero. Legamefunzionale. S superficie di base del serbatoio.")
11
Esempio 1 Esempio 2 y(t) = u(t)/R
il legame funzionale è un legame puramente algebrico: Sistema statico Esempio 2 il legame funzionale è un’equazione differenziale l'uscita in un generico istante t dipende anche dai valori passati dell'ingresso. il sistema ha memoria della sua storia passata: Sistema dinamico y(t) = u(t)/R
 = u(t)/R.")
12
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
14
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
15
Concetto di stato di un sistema
In un sistema dinamico l'uscita y(t) in un generico istante t dipende anche dai valori passati dell'ingresso Se siamo interessati a calcolare l'uscita in un dato intervallo di tempo non è sufficiente conoscere i valori dell'ingresso u(t) in tale intervallo Per risolvere il problema ci manca l'informazione sulla situazione in cui si trova il sistema all’inizio dell’intervallo di tempo considerato!!
 in un generico istante t dipende anche dai valori passati dell ingresso. Se siamo interessati a calcolare l uscita in un dato intervallo di tempo non è sufficiente conoscere i valori dell ingresso u(t) in tale intervallo. Per risolvere il problema ci manca l informazione sulla situazione in cui si trova il sistema all’inizio dell’intervallo di tempo considerato!!")
16
Definizione di stato di un sistema

17
Variabili di stato i valori in un dato istante devono tenere conto di tutta la storia passata del sistema e devono essere sufficienti per valutarne l’andamento futuro a partire dalla conoscenza degli ingressi (proprietà di separazione); i valori in un dato istante non dipendono dai valori futuri degli ingressi (proprietà di causalità).
; i valori in un dato istante non dipendono dai valori futuri degli ingressi (proprietà di causalità).")
18
Trasformazione di uscita
Transizione di stato Trasformazione di uscita la mappa di transizione di stato tiene conto di come si aggiornano le variabili di stato da un istante iniziale t0 ad uno successivo t per effetto dei valori assunti dalle stesse variabili di stato nell’istante iniziale t0 e degli andamenti delle variabili d’ingesso nell’intervallo [t0, t); la mappa di uscita (trasformazione di uscita) esprime il legame statico all’istante t tra i valori delle variabile di stato e i valori assunti dalle variabili d’ingresso allo stesso istante t.
; la mappa di uscita (trasformazione di uscita) esprime il legame statico all’istante t tra i valori delle variabile di stato e i valori assunti dalle variabili d’ingresso allo stesso istante t.")
19
n = ordine del sistema Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori.")
20
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
21
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
23
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
24
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
25
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
26
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
27
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
28
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
29
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
30
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
31
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
32
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
33
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
34
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
35
Illustrazioni dal testo “Fondamenti di Controlli Automatici (Bolzern, Scattolini, Schiavoni)” per gentile concessione degli Autori
 per gentile concessione degli Autori")
Presentazioni simili






>")












