Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
I Motori Asincroni (ad Induzione) Generalità di Tipo Costruttivo
Le macchine asincrone sono macchine rotanti la cui velocità angolare di rotore non è rigidamente legata a quella del campo rotante. Sono dette anche “macchine ad induzione” perchè gli avvolgimenti di rotore sono sede esclusivamente di correnti indotte dal campo rotante. La coppia motrice nasce dalla interazione del campo rotante generato da un sistema di correnti che circolano negli avvolgimenti di statore (sistema induttore) con il campo magnetico generato dalle correnti di rotore (sistema indotto). Sistema induttore: è montato sullo statore ed è composto da un pacco di lamierini al FeSi, aventi forma di corona circolare, in sono state predisposte le cave per l’alloggiamento degli avvolgimenti. Lo statore delle macchine asincrone è del tutto identico allo statore delle macchine sincrone. Si rimanda a quella trattazione. Generalità di Tipo Costruttivo
 con il campo magnetico generato dalle correnti di rotore (sistema indotto). Sistema induttore: è montato sullo statore ed è composto da un pacco di lamierini al FeSi, aventi forma di corona circolare, in sono state predisposte le cave per l’alloggiamento degli avvolgimenti. Lo statore delle macchine asincrone è del tutto identico allo statore delle macchine sincrone. Si rimanda a quella trattazione. Generalità di Tipo Costruttivo.")
2
Sistema indotto: è montato sull’albero di rotore ed è composto da un pacco di lamierini magnetici sulla cui periferia sono state predisposte le cave per l’avvolgimento di rotore. I rotori si distinguono in: rotori avvolti; rotori a gabbia gabbia semplice; doppia gabbia; barre profonde. Il numero delle cave di rotore e di statore devono essere in numero non multiplo uno dell’altro per evitare che gli eventuali allineamenti tra le parti attive degli avvolgimenti provochino una mancata concatenazione tra i flussi magnetici di statore e rotore (problemi allo spunto).
.")
3
Circuito magnetico di accoppiamento: è composto dal circuito magnetico di statore e di rotore. Le due sezioni sono divise da un traferro che è sede del campo principale. Sia il rotore che lo statore sono sede di flussi variabili nel tempo. I rispettivi circuiti magnetici sono laminati per ridurre le perdite nel ferro (correnti parassite). Avvolgimenti di Rotore: I conduttori che si trovano nelle cave di rotore devono costituire, nel loro insieme, un avvolgimento polifase avente lo stesso numero di poli dell’avvolgimento di statore. Rotore avvolto con collettore ad anelli. È del tutto simile all’avvolgimento di statore, compresa la forma delle cave.
. Avvolgimenti di Rotore: I conduttori che si trovano nelle cave di rotore devono costituire, nel loro insieme, un avvolgimento polifase avente lo stesso numero di poli dell’avvolgimento di statore. Rotore avvolto con collettore ad anelli. È del tutto simile all’avvolgimento di statore, compresa la forma delle cave.")
4
Le fasi sono collegate a stella o a triangolo ed i terminali fanno capo a tre anelli su cui strisciano le spazzole che consentono la chiusura degli avvolgimenti su un circuito esterno (ad esempio, sul reostato di avviamento). In funzionamento normale, i tre anelli sono in corto circuito allo scopo di ottenere la minima resistenza di avvolgimento. Rotore a gabbia semplice è perennemente in corto circuito. È composta da un solo conduttore per cava, in rame o in alluminio, isolato solo dall’ossido superficiale, le cui estremità sono collegate ad un anello frontale dello stesso materiale.

5
Per piccole e medie potenze, le sbarre e gli anelli sono realizzati in alluminio presso-fuso.
Per grosse potenze le sbarre vengono realizzate a parte ed inserite a freddo (azoto liquido) e gli anelli vengono saldati e torniti. Dato che i conduttori sono perennemente in corto, le correnti circolanti sono piuttosto intense. Non presenta un prefissato numero di poli.
 e gli anelli vengono saldati e torniti. Dato che i conduttori sono perennemente in corto, le correnti circolanti sono piuttosto intense. Non presenta un prefissato numero di poli.")
6
Osservazioni Non viene impiegato come generatore perché non è in grado di produrre potenza reattiva e perché cambia la frequenza delle grandezze elettriche in funzione del carico. Funziona come un trasformatore con un sistema di avvolgimenti in movimento. ANELLI DI CORTO CIRCUITO PACCO MAGNETICO BARRE DELLA GABBIA PALETTE DI VENTILAZIONE Vengono realizzati per sviluppare tutti i tipi di velocità, basta variare il numero di poli o le frequenze di alimentazione.

7
Di costruzione robusta, semplice ed economica.
albero cuscinetto Supporto del circuito magnetico di statore Coperchi frontali supporti Ventola ed anello pressapacco morsettiera Anello pressapacco Avvolgimenti di statore gabbia Circuito magnetico di statore Circuito magnetico di rotore Vengono realizzati per una vastissima gamma di potenze (da pochi W fino a decine di MW). Di costruzione robusta, semplice ed economica. Sta soppiantando le altre macchine grazie alla alimentazione a frequenza variabile (PWM) soprattutto nelle applicazioni dove viene richiesta una notevole variazione di velocità (campo specifico delle macchine in cc ad eccitazione serie).
. Di costruzione robusta, semplice ed economica. Sta soppiantando le altre macchine grazie alla alimentazione a frequenza variabile (PWM) soprattutto nelle applicazioni dove viene richiesta una notevole variazione di velocità (campo specifico delle macchine in cc ad eccitazione serie).")
8
Principi di Funzionamento
Considero una macchina asincrona con il rotore avvolto. Lo statore viene collegato ad una rete a potenza infinita con tensioni concatenate simmetriche e valore efficace costante. L’avvolgimento di rotore avente un numero di poli pari a quello di statore, è collegato agli anelli di rotore ed i terminali sono, per il momento, aperti. Se si chiude l’alimentazione, negli avvolgimenti di statore circola un sistema di correnti equilibrate (per le condizioni di simmetria costruttiva della macchina), limitate dalla resistenza e dalla reattanza interna di macchina. Sia R la resistenza dei conduttori ed X la reattanza legata al flusso al traferro che si concatena con il solo avvolgimento di statore. Le correnti assorbite danno origine ad un campo magnetico rotante di statore identico a quello delle macchine sincrone.
, limitate dalla resistenza e dalla reattanza interna di macchina. Sia R la resistenza dei conduttori ed X la reattanza legata al flusso al traferro che si concatena con il solo avvolgimento di statore. Le correnti assorbite danno origine ad un campo magnetico rotante di statore identico a quello delle macchine sincrone.")
9
Ipotesi di Campo In modo del tutto identico al procedimento proposto nel caso delle macchine sincrone, possiamo formulare le ipotesi di campo: 1) permeabilità magnetica del ferro infinita (f= => Hf=0); 2) distribuzione del campo magnetico identica in tutti i piani perpendicolari all’asse di macchina (si trascurano gli effetti di bordo nelle testate); 3) andamento radiale delle linee di flusso al traferro (le componenti tangenziali del campo devono essere nulle. Si trascurano le perturbazioni di campo dovute alle cave). Tenendo conto del n°delle fasi, della distribuzione spaziale delle q cave per polo e per fase, del n° dei poli, l’andamento della f.m.m. al traferro è a scalini con valore medio nullo nello sviluppo perimetrale. Abbiamo dimostrato, con riferimento all’armonica fondamentale, che il campo magnetico rotante viene descritto dalla espressione:
 permeabilità magnetica del ferro infinita (f= => Hf=0); 2) distribuzione del campo magnetico identica in tutti i piani perpendicolari all’asse di macchina (si trascurano gli effetti di bordo nelle testate); 3) andamento radiale delle linee di flusso al traferro (le componenti tangenziali del campo devono essere nulle. Si trascurano le perturbazioni di campo dovute alle cave). Tenendo conto del n°delle fasi, della distribuzione spaziale delle q cave per polo e per fase, del n° dei poli, l’andamento della f.m.m. al traferro è a scalini con valore medio nullo nello sviluppo perimetrale. Abbiamo dimostrato, con riferimento all’armonica fondamentale, che il campo magnetico rotante viene descritto dalla espressione:")
10
Il campo rotante visto da un osservatore fisso con lo statore ed uno fisso con il rotore (fermo) è un campo variabile nel tempo con legge sinusoidale. Il profilo dell’induzione al traferro viene descritto dalla relazione: Il flusso medio per polo si calcola tenendo conto della superficie del polo Sp=pl dove p è il passo polare ed l la lunghezza del pacco magnetico. Questo flusso, concatenandosi sia con lo statore che con il rotore, induce una f.e.m. il cui andamento è sinusoidale. Se il rotore è fermo, l’analogia con il trasformatore a vuoto è completa. E’ possibile esplicitare l’espressione fasoriale delle f.e.m. indotte sullo statore e sul rotore:

11
Er è misurabile ai morsetti aperti del rotore.
Ks e Kr differiscono per il diverso coefficiente di avvolgimento. Ne segue che nello statore viene assorbita una corrente di magnetizzazione che genera il campo rotante (e sostiene le perdite nel ferro) che vale: Is0 è circa i % di In contro il 5% dei trasformatori, a causa della presenza di un largo traferro. Possiamo immaginare che Inoltre, definiamo il rapporto di trasformazione elettrico come:
 che vale: Is0 è circa i % di In contro il 5% dei trasformatori, a causa della presenza di un largo traferro. Possiamo immaginare che. Inoltre, definiamo il rapporto di trasformazione elettrico come:")
12
Rotore in Corto Se chiudiamo gli avvolgimenti di rotore in corto, le f.e.m. di rotore fanno circolare una corrente Ir nelle fasi di rotore (terna equilibrata per simmetria costruttiva). Queste correnti vengono limitate dalla resistenza degli avvolgimenti e dalle reattanza di rotore. La terna delle correnti di rotore generano, a loro volta, un campo rotante di reazione che è perfettamente sincrono con quello di induzione. Il suo n°di poli è pari a quello di statore. Se il rotore è fermo, la velocità del campo rotante è identica alla velocità angolare del campo rotante di statore (induttore). Siamo in condizione di sincronismo tra campi magnetici rotanti. Nasce quindi una coppia meccanica di spunto che tende a far muovere il motore nella direzione del campo rotante induttore.
. Queste correnti vengono limitate dalla resistenza degli avvolgimenti e dalle reattanza di rotore. La terna delle correnti di rotore generano, a loro volta, un campo rotante di reazione che è perfettamente sincrono con quello di induzione. Il suo n°di poli è pari a quello di statore. Se il rotore è fermo, la velocità del campo rotante è identica alla velocità angolare del campo rotante di statore (induttore). Siamo in condizione di sincronismo tra campi magnetici rotanti. Nasce quindi una coppia meccanica di spunto che tende a far muovere il motore nella direzione del campo rotante induttore.")
13
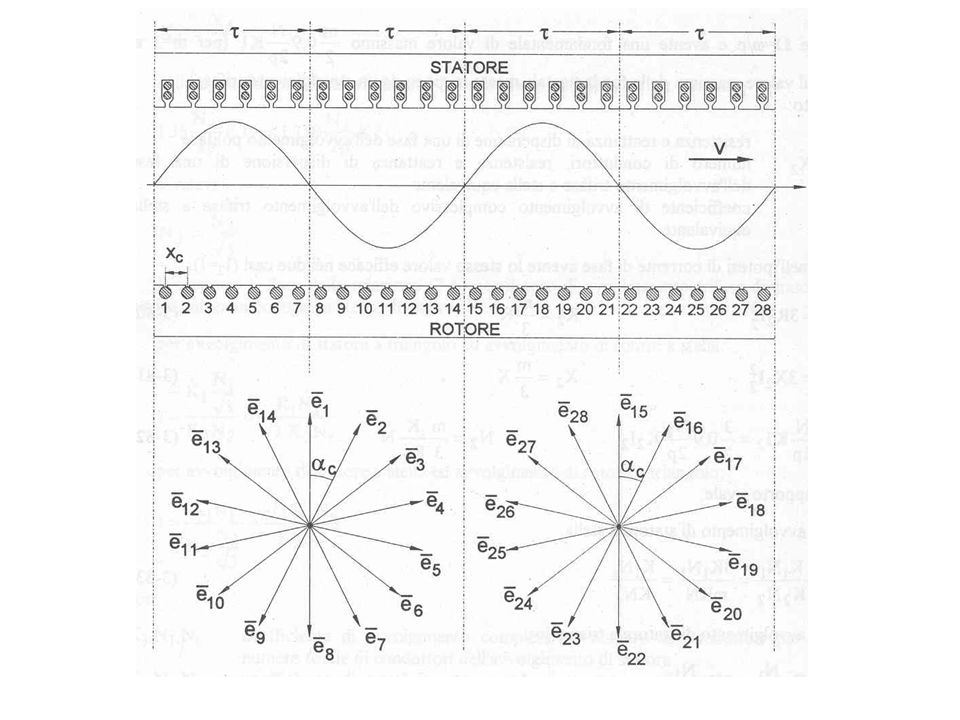
Rotori a Gabbia I rotori a gabbia non presentano un numero di poli prefissato ma “copiano” il n° di poli del campo rotante. Le singole barre vengono investite dal campo rotante ed ognuna di esse si concatena con una quota di flusso magnetico che dipende dalla posizione angolare relativa tra barra ed onda. Con riferimento alla figura (pag.seguente), le prime 7 barre si concatenano con un flusso di segno positivo dando origine a 7 f.e.m. che sono sfasati tra loro di 2R/2pZr. Sotto il polo di segno contrario, le barre sono interessate dallo stesso flusso ma di segno contrario al precedente.
, le prime 7 barre si concatenano con un flusso di segno positivo dando origine a 7 f.e.m. che sono sfasati tra loro di 2R/2pZr. Sotto il polo di segno contrario, le barre sono interessate dallo stesso flusso ma di segno contrario al precedente.")
15
Lo stesso ragionamento può essere ripetuto per le altre coppie polari.
Questo ragionamento prova sia che il n° di poli di rotore è identico a quello di statore che il n°massimo di poli è pari al n° delle barre di rotore. Le f.e.m. indotte fanno circolare le correnti di rotore con il medesimo meccanismo spiegato per il caso del rotore avvolto. Queste correnti circolano nelle barre e si chiudono negli anelli di testa (circuito in corto). La circolazione delle correnti è dettato dalle f.e.m. indotte. Si genera un sistema di correnti equilibrate, limitate dalle resistenze e dalle reattanze di barre ed anello. L’insieme delle forze che si esercitano tra conduttori di statore e di rotore determina la coppia motrice che trascina il motore in rotazione nella direzione di rotazione del campo rotante. Noto il verso di rotazione del rotore, con la regola della mano destra si determina il verso di percorrenza delle correnti nei conduttori.
. La circolazione delle correnti è dettato dalle f.e.m. indotte. Si genera un sistema di correnti equilibrate, limitate dalle resistenze e dalle reattanze di barre ed anello. L’insieme delle forze che si esercitano tra conduttori di statore e di rotore determina la coppia motrice che trascina il motore in rotazione nella direzione di rotazione del campo rotante. Noto il verso di rotazione del rotore, con la regola della mano destra si determina il verso di percorrenza delle correnti nei conduttori.")
16
Condizione di Moto Stazionario
Rotore a Poli Salienti (Macchina Anisotropa) Condizione di Moto Stazionario Durante l’avviamento, mentre il rotore accelera, diminuisce la velocità relativa tra campo rotante ed il rotore stesso. Diminuisce la velocità con cui le linee di forza del campo tagliano le barre rotoriche si modifica il regime elettrico indotto negli avvolgimenti di rotore. Per una generica velocità di rotazione per il rotore (il campo rotante di statore ruota a giri fissi determinati dalla frequenza elettrica e dal numero di poli), due osservatori, uno solidale con il rotore e l’altro con lo statore, vedranno condizioni di funzionamento diverse. Osservatore fisso sullo statore L’osservatore fisso con lo statore vede un campo magnetico dipendente dal tempo con legge (* è lo sfasamento tra la posizione dell’osservatore A ed un riferimento fisso), il cui periodo è
 Condizione di Moto Stazionario. Durante l’avviamento, mentre il rotore accelera, diminuisce la velocità relativa tra campo rotante ed il rotore stesso. Diminuisce la velocità con cui le linee di forza del campo tagliano le barre rotoriche si modifica il regime elettrico indotto negli avvolgimenti di rotore. Per una generica velocità di rotazione per il rotore (il campo rotante di statore ruota a giri fissi determinati dalla frequenza elettrica e dal numero di poli), due osservatori, uno solidale con il rotore e l’altro con lo statore, vedranno condizioni di funzionamento diverse. Osservatore fisso sullo statore. L’osservatore fisso con lo statore vede un campo magnetico dipendente dal tempo con legge. (* è lo sfasamento tra la posizione. dell’osservatore A ed un riferimento fisso), il cui periodo è.")
17
Lo stesso osservatore, A, vede il rotore ruotare con pulsazione angolare mr .
Osservatore mobile con il rotore Il rotore è in movimento con un determinato numero di giri nr [giri/min]. L’osservatore B vede l’osservatore fisso di statore A rimanere indietro con lo stesso n° di giri e verso contrario rispetto a quello indicato da A. L’osservatore B vede il campo rotante di statore superarlo con una velocità vc>vmr. Il numero di giri del campo rotante, visti dall’osservatore B di rotore, sarà nc-nmr. I conduttori di rotore tagliano le linee del campo rotante con una velocità vc-vmr => Rc-Rmr Ne segue che nel rotore si instaura un regime elettrico che dipende dalla velocità relativa (vc-vmr) del campo rotante di statore rispetto all’osservatore B di rotore.
 del campo rotante di statore rispetto all’osservatore B di rotore.")
18
L’osservatore B vede un campo rotante variabile nel tempo con legge trigonometrica di periodo Ter pari a: Definizione di scorrimento Definiamo come scorrimento il rapporto tra la velocità relativa del campo rispetto al rotore. S esprime la frazione di giro che il rotore perde ogni giro completo del campo rotante. In termini percentuali: Ed esprime il n° di giri che il rotore perde ogni 100 giri del campo rotante. S=1 se nmr=0 => il rotore è fermo S=0 se nmr=nc => il rotore ruota con il campo rotante

19
Ora, il periodo dell’onda di campo di statore vista dal rotore può essere espressa come:
ma Ne segue che Con riferimento alla frequenza, Moltiplicando ambo i membri per il n°paia poli, vediamo che l’osservatore di rotore attribuisce al campo rotante una frequenza diversa da quella vista dall’osservatore di statore. Se x’ è la distanza misurata sul rotore a partire da un riferimento fisso con il rotore, il campo rotante visto dallo statore l’espressione che per le condizioni trovate possiamo riscrivere come:

20
Osservazioni: se il rotore è fermo vr=0 => s=1 => Il campo di statore viene visto nello stesso modo sia dal rotore che dallo statore (condizione trasformatorica). Il rotore e lo statore vedono i campi muoversi con la stessa velocità. In condizioni di perfetto sincronismo tra campo rotante e rotore vr=vc => s=0 => B(x’,t) è costante nel tempo. Il rotore vede un campo rotante fermo perché si stanno muovendo con la stessa velocità. Il flusso concatenato è nullo, le f.e.m. indotte sono nulle e non circolano correnti nel rotore. Se non c’è corrente di rotore, non si crea nessun campo rotante di reazione e viene a cessare il meccanismo di generazione di coppia motrice.
. Il rotore e lo statore vedono i campi muoversi con la stessa velocità. In condizioni di perfetto sincronismo tra campo rotante e rotore vr=vc => s=0 => B(x’,t) è costante nel tempo. Il rotore vede un campo rotante fermo perché si stanno muovendo con la stessa velocità. Il flusso concatenato è nullo, le f.e.m. indotte sono nulle e non circolano correnti nel rotore. Se non c’è corrente di rotore, non si crea nessun campo rotante di reazione e viene a cessare il meccanismo di generazione di coppia motrice.")
21
Il Regime Elettrico di Rotore
La coppia resistente fa rallentare il motore, ma se la macchina rallenta s0 e quindi er(t)0 ed il rotore ridiventa sede di correnti e di coppia motrice. La macchina si porta in un punto di equilibrio in cui il ritardo del rotore sul campo rotante produce un regime di correnti tale da creare una coppia motrice che equilibra quella resistente. Il valore efficace delle f.e.m. indotte sul rotore è legato alla frequenza del campo rotante visto dal rotore ed è pari a sapendo che fer=sf => La f.e.m. di rotore Er=Er(s)=sEr(s=1) varia al variare dello scorrimento. Lo scorrimento dipende dal carico, precisamente dalla coppia resistente che esso è chiamato a vincere. A vuoto Er(s=0)=0, non ci sono f.e.m. e quindi correnti nel rotore. Il Regime Elettrico di Rotore
0 ed il rotore ridiventa sede di correnti e di coppia motrice. La macchina si porta in un punto di equilibrio in cui il ritardo del rotore sul campo rotante produce un regime di correnti tale da creare una coppia motrice che equilibra quella resistente. Il valore efficace delle f.e.m. indotte sul rotore è legato alla frequenza del campo rotante visto dal rotore ed è pari a. sapendo che fer=sf => La f.e.m. di rotore Er=Er(s)=sEr(s=1) varia al variare dello scorrimento. Lo scorrimento dipende dal carico, precisamente dalla coppia resistente che esso è chiamato a vincere. A vuoto Er(s=0)=0, non ci sono f.e.m. e quindi correnti nel rotore. Il Regime Elettrico di Rotore.")
22
Alla velocità di sincronismo, il motore funziona a vuoto
Alla velocità di sincronismo, il motore funziona a vuoto. In pratica, questa condizione non può essere mai raggiunta perchè il motore deve vincere gli attriti e sopperire alle perdite. A pieno carico s varia tra 1% ed il 5%. Se applichiamo il II°p di Kirchoff ai circuiti elettrici di rotore possiamo scrivere che Er(s) fa circolare correnti con una frequenza fer. Considerato il sistema elettrico di rotore, le correnti generano a loro volta un campo magnetico rotante di reazione che ruota, con riferimento ad un osservatore solidale con il rotore, B, con una velocità angolare pari a giri/min rispetto al rotore nel vero di rotazione del campo induttore. Il campo rotante di rotore ruota rispetto al rotore con un numero di giri paria dalla def. di scorrimento
 fa circolare correnti con una frequenza fer. Considerato il sistema elettrico di rotore, le correnti generano a loro volta un campo magnetico rotante di reazione che ruota, con riferimento ad un osservatore solidale con il rotore, B, con una velocità angolare pari a. giri/min rispetto al rotore nel vero di rotazione del campo induttore. Il campo rotante di rotore ruota rispetto al rotore con un numero di giri paria dalla def. di scorrimento.")
23
nr+(nc-nr)=nc [giri/min]
Il campo rotante di rotore si muove sul rotore che ha un numero di giri pari ad nr. Un osservatore esterno, solidale con lo statore vede un campo rotante di rotore che ruota con un numero di giri pari a nr+(nc-nr)=nc [giri/min] sincrono, cioè con il campo rotante di statore. Sistemi di riferimento Riferimento di Statore Un osservatore esterno vede il campo rotante di statore e di rotore ruotare con la stessa velocità angolare. Qualunque sia lo scorrimento del rotore, il campo che esso genera si mantiene in perfetto sincronismo con il campo rotante induttore. In condizioni di regime, i due campi mantengono invariata la loro posizione relativa reciproca. L’osservatore di statore vede un regime elettrico di rotore avente la stessa frequenza di quello di statore e vede il rotore ruotare con una pulsazione o numero di giri mr= c- sc=(1-s) c
![nr+(nc-nr)=nc [giri/min]](http://slideplayer.it/slide/577345/2/images/23/nr%2B%28nc-nr%29%3Dnc+%5Bgiri%2Fmin%5D.jpg "Il campo rotante di rotore si muove sul rotore che ha un numero di giri pari ad nr. Un osservatore esterno, solidale con lo statore vede un campo rotante di rotore che ruota con un numero di giri pari a. nr+(nc-nr)=nc [giri/min] sincrono, cioè con il campo rotante di statore. Sistemi di riferimento. Riferimento di Statore. Un osservatore esterno vede il campo rotante di statore e di rotore ruotare con la stessa velocità angolare. Qualunque sia lo scorrimento del rotore, il campo che esso genera si mantiene in perfetto sincronismo con il campo rotante induttore. In condizioni di regime, i due campi mantengono invariata la loro posizione relativa reciproca. L’osservatore di statore vede un regime elettrico di rotore avente la stessa frequenza di quello di statore e vede il rotore ruotare con una pulsazione o numero di giri mr= c- sc=(1-s) c.")
24
Riferimento di Rotore Un osservatore solidale con il rotore vede lo statore che ruota all’indietro con una pulsazione angolare mr e vede un campo rotante che lo precede con una pulsazione sc Secondo l’osservatore di rotore, il regime elettrico è caratterizzato da una frequenza di fer=sf. Riferimento sul Campo Rotante Un osservatore solidale con il campo rotante vede lo statore che si muove con pulsazione rotore vede lo statore che ruota all’indietro con una pulsazione -c nel verso opposto rispetto all’osservatore di statore e vede il rotore che si muove con pulsazione angolare sc nella direzione dello statore.

25
Equazioni Interne in Regime Dinamico
Dal punto di vista modellistico, si immagina di avere un rotore avvolto come lo statore, con i tre avvolgimenti posti in corto circuito e solidali con il rotore posto in rotazione. L’accoppiamento tra gli avvolgimenti statorici e rotorici varia con la posizione relativa tra statore e rotore. Considero un riferimento trifase solidale con lo statore ed uno solidale con il rotore. I due sono posti in relazione dall’angolo (t) che in condizioni dinamiche, si modifica nel tempo (d/dt0). Per ipotesi, ci riferiamo alle sole fondamentali delle grandezze elettriche. Nei rispettivi riferimenti, posso pensare allora di introdurre i vettori spaziali. Nel riferimento di rotore, le grandezze elettriche rotoriche non vedono il rotore in moto. is2 is1 is3 ir3 ir2 ir1
 che in condizioni dinamiche, si modifica nel tempo (d/dt0). Per ipotesi, ci riferiamo alle sole fondamentali delle grandezze elettriche. Nei rispettivi riferimenti, posso pensare allora di introdurre i vettori spaziali. Nel riferimento di rotore, le grandezze elettriche rotoriche non vedono il rotore in moto. is2. is1. is3. ir3. ir2. ir1.")
26
Nei rispettivi riferimenti, possiamo scrivere immediatamente le equazioni elettriche di statore e di rotore: Equazione di statore con riferimento sullo statore. Equazione di rotore con riferimento sul rotore. Dove s e r sono i flussi totali concatenati con gli avvolgimenti di statore e di rotore. Dobbiamo precisare meglio il legame tra correnti e flussi concatenati perché entra in gioco il moto relativo dei riferimenti. Sia nelle gabbie che nei rotori avvolti, le grandezze rotoriche non sono misurabili direttamente. Il riferimento alle sole fondamentali ci consente di ricorrere alla distribuzione di avvolgimento definito durante la discussione sui M.S.

27
Trasformazione Trifase (123) Bifase Assi Fissi ()
Dato un sistema di correnti trifase equilibrato tali che i1+i2+i3=0 è possibile ottenere un vettore spaziale i=(i1+ai2+a2i3) con a=ej2/3 In tale piano è possibile rappresentare il vettore in un sistema di due assi cartesiani mediante rappresentazione di numeri complessi mediante la trasformazione (123) => (). Questa trasformazione la posso applicare sia sullo statore che sul rotore, nei rispettivi riferimenti. In un sistema di riferimento a 2D, la macchina asincrona viene modellata da sue avvolgimenti solidali con lo statore e da due solidali col rotore. b a 1 3 2 i Á Â i i 3 2 i 123 i ab as ibs ias s ibr iar br ar
 con a=ej2/3. In tale piano è possibile rappresentare il vettore in un sistema di due assi cartesiani mediante rappresentazione di numeri complessi mediante la trasformazione (123) => (). Questa trasformazione la posso applicare sia sullo statore che sul rotore, nei rispettivi riferimenti. In un sistema di riferimento a 2D, la macchina asincrona viene modellata da sue avvolgimenti solidali con lo statore e da due solidali col rotore. b. a i. Á. Â. i i i 123. i ab. as. ibs. ias. s. ibr. iar. br. ar. ")
28
Trasformazione Assi Fissi () =>Assi Mobili (dq)
E’ necessario descrivere il concatenamento tra flussi solidali con un sistema fisso ed uno mobile. Si consideri ora un sistema di riferimento (d,q) che si muove rispetto al riferimento fisso con velocità angolare variabile r(t)=d/dt. Il sistema di riferimento è scelto in modo tale che l’asse diretto, d, coincide con l’asse fisso, , quando t=0. Sappiamo che l’operazione di trasformazione assi fissi / assi mobili si effettua utilizzando la matrice di trasformazione |A()| a b q d ia ib iq id i A(J) i ab i dq O l’operatore di rotazione e -j nel piano complesso: A()<==> e -j At()<==> e j
 che si muove rispetto al riferimento fisso con velocità angolare variabile r(t)=d/dt. Il sistema di riferimento è scelto in modo tale che l’asse diretto, d, coincide con l’asse fisso, , quando t=0. Sappiamo che l’operazione di trasformazione assi fissi / assi mobili si effettua utilizzando la matrice di trasformazione |A()| a. b. q. d. ia. ib. iq. id. i. A(J) i ab. i dq. O l’operatore di rotazione e -j nel piano complesso: A()<==> e -j At()<==> e j")
29
Nel caso del motore asincrono, gli assi di rotore sono rotanti per lo statore ma sono fissi per il rotore. Questo ragionamento ci porta a concludere che, nel caso degli asincroni, la trasformazione assi fissi/assi rotanti riguarda l’accoppiamento meccanico tra due sistemi fissi . Nel caso del M.S. è stato visto che: []=L[][i] si studia ora la espressione di L[], matrice delle auto e mutue induzioni delle macchine asincrone sapendo che [i]=[is , is , ir , ir ]t; []=[s , s , r , r ] t; J br as bs ar

30
Come dimostrato nel caso della macchina sincrona, le mutue relative alle correnti di statore ( e di rotore nel proprio riferimento rotante) sono state inglobate in L. Ne segue che, in questa rappresentazione, sono nulle. Nella relazione tra correnti e flussi dello stesso sistema, sono presenti solo coeff.di auto induzione. Le mutue compaiono per tenere conto della influenza tra correnti rotoriche e statore e tra correnti statoriche e rotore. Gli accoppiamenti di mutua tra gli avvolgimenti di statore e rotore, nei rispettivi riferimenti, tengono conto degli sfasamenti relativi: M11=M22=M33=Mcos(t); M12=M23=M31=Mcos(t+120°); M13=M21=M32=Mcos(t+240°); is2 is1 is3 ir3 ir2 ir1 Data la simmetria del circuito, i coefficienti di mutua M sono tutti uguali e si determinano con lo stesso ragionamento già discusso nel caso delle macchine sincrone.
; M12=M23=M31=Mcos(t+120°); M13=M21=M32=Mcos(t+240°); is2. is1. is3. ir3. ir2. ir1. Data la simmetria del circuito, i coefficienti di mutua M sono tutti uguali e si determinano con lo stesso ragionamento già discusso nel caso delle macchine sincrone.")
31
Dopo aver applicato la trasformazione di riferimento (123) => () dei riferimenti di statore e rotore, l’accoppiamento tra un avvolgimenti di rotore ed uno di statore dipende dallo sfasamento dei riferimenti in modo sinusoidale. J br as bs ar Quando r ed s sono allineati, l’accoppiamento è massimo e nullo tra r e s perché sfasati di 90° (e viceversa). Allo stesso modo, l’accoppiamento è massimo anche quando r è allineato con s (nullo tra r ed s).
. Allo stesso modo, l’accoppiamento è massimo anche quando r è allineato con s (nullo tra r ed s).")
32
Ricordando la definizione e le proprietà della matrice di trasformazione |A()|:
Possiamo esplicitare la relazione tra correnti e flussi concatenati come: La matrice è necessariamente simmetrica per reciprocità. I è la matrice identità Introduciamo i vettori: (matrici colonna) possiamo esplicitare meglio la relazione tra correnti e flussi
 possiamo esplicitare meglio la relazione tra correnti e flussi.")
33
Trasformazione su un riferimento generico k
Si consideri ora un sistema di riferimento generico, k, a cui riferire entrambi i sistemi simultaneamente. Tramite la matrice di trasformazione |A(k)| mi porto da un riferimento all’altro, ad esempio da riferimento di statore al riferimento k br bs ak bk Jk ar J as da riferimento di rotore al riferimento k ad esempio, se pre-moltiplico per |A(k)| la relazione di statore
| mi porto da un riferimento all’altro, ad esempio. da riferimento di statore al riferimento k. br. bs. ak. bk. Jk. ar. J. as. da riferimento di rotore al riferimento k. ad esempio, se pre-moltiplico per |A(k)| la relazione di statore.")
34
e ricordarci che Ora, quindi, Si conclude che sul riferimento k generico si perde la dipendenza delle mutue dalla posizione angolare. Lo stesso ragionamento si applica sulla equazione di flusso di rotore, in analogia con il procedimento appena svolto (basta premoltiplicare la equazione di rotore per |A(k- )|. Osservazione Importante: si ottiene un sistema indipendente da e quindi dal riferimento Equazione di statore con riferimento k generico Equazione di rotore con riferimento k generico
|. Osservazione Importante: si ottiene un sistema indipendente da e quindi dal riferimento. Equazione di statore con riferimento k generico. Equazione di rotore con riferimento k generico.")
35
Equazioni Elettriche Si devono riferire le equazioni elettriche al nuovo sistema di riferimento k. Le equazioni elettriche di statore e rotore, riferite ai rispettivi riferimenti di statore e rotore, possono essere espresse come: Sfruttiamo l’espressione fasoriale della matrice di trasformazione |A(k)| => e-jk Se, ad esempio, se voglio trasformare il flusso di statore, s dal suo riferimento nel riferimento generico k, è sufficiente effettuare la moltiplicazione Applicando questa trasformazione alla prima equazione elettrica
| => e-jk. Se, ad esempio, se voglio trasformare il flusso di statore, s dal suo riferimento nel riferimento generico k, è sufficiente effettuare la moltiplicazione. Applicando questa trasformazione alla prima equazione elettrica.")
36
l’espressione della derivata è
La inserisco nella espressione da cui deriva Nella espressione compare un termine mozionale. Se consideriamo la seconda equazione elettrica riferita al rotore e ripetiamo le stesse considerazioni sulla trasformazione dal riferimento di rotore a quello generico k otteniamo

37
l’espressione della derivata è
La inserisco nella espressione da cui deriva Anche in questo caso compaiono termini mozionali. Possiamo scrivere le equazioni dei flussi concatenati e quelle elettriche con riferimento ad un generico riferimento k nelle ipotesi di distribuzione sinusoidale delle grandezze elettriche e magnetiche; linearità magnetica. Si può omettere di usare il pendice k perché compare nella variabile k che ricorda la variazione di riferimento

38
Bilancio Energetico Riassumendo, le equazioni ricavate sono:
Legame correnti, flussi Equazione di statore Equazione di rotore Bilancio Energetico Dalle equazioni elettriche di statore e di rotore possiamo ricavare un bilancio energetico premoltiplicando entrambe le equazioni per le rispettive correnti:

39
Come al solito, si trascurano le perdite nel ferro.
Esaminando termine per termine si vede che: È la potenza elettrica che entra in macchina. È la potenza persa per effetto Joule negli avvolgimenti di statore e di rotore. Rappresentano le variazioni di energia magnetica immagazzinata dallo statore e dal rotore, rispettivamente. sono f.e.m. trasformatoriche

40
Sono termini relativi alla produzione di energia meccanica
Sono termini relativi alla produzione di energia meccanica. Le potenze sono sommabili. Ne viene che I primi due termini rappresentano la potenza che esce dallo statore ed entra nel rotore. Hanno segno discorde e la loro somma è nulla. L’ultima è la potenza elettrica equivalente meccanica prodotta dalla macchina asincrona. Ricordando che j è un operatore di rotazione di 90° Osservazione Importante: Tra tutti i possibili riferimenti, viene scelto uno solidale con la pulsazione elettrica e perché legato alla frequenza di rete che è un parametro facilmente controllabile ed è caratterizzante per il regime elettrico (e = k). Ora tutte le considerazioni fin qui svolte si riferivano ad un sistema a due poli (p=1) caratterizzato dal rispettare la condizione e = c
. Ora tutte le considerazioni fin qui svolte si riferivano ad un sistema a due poli (p=1) caratterizzato dal rispettare la condizione e = c.")
41
e dall’avere una pulsazione meccanica m =(1- s)c .
In un sistema multipolare, i ragionamenti svolti vanno ripetuti sotto ogni coppia polare. Lo scorrimento delle grandezze elettriche viene riferito ad una pulsazione elettrica equivalente meccanica che è legata alla pulsazione meccanica dal numero di coppie polari (em=pm pulsazione meccanica equivalente elettrica). Per lo scorrimento possiamo scrivere che Tornando alla espressione della coppia Si possono esplicitare anche altre espressioni equivalenti tenendo conto del legame tra flussi e correnti. Sostituendo r nella espressione della coppia con la seconda equazione del sistema si ottiene
. Per lo scorrimento possiamo scrivere che. Tornando alla espressione della coppia. Si possono esplicitare anche altre espressioni equivalenti tenendo conto del legame tra flussi e correnti. Sostituendo r nella espressione della coppia con la seconda equazione del sistema si ottiene.")
42
Nota: il prodotto vettoriale tra due vettori paralleli è nullo.
Se invece si sostituisce ir prendendolo dalla prima equazione L’espressione più utilizzata prevede la presenza delle correnti statoriche perché facilmente misurabile ed i flussi rotorici.

43
Equazioni Interne per la Dinamica su Riferimento k
Legame correnti, flussi Equazione di statore Equazione di rotore Coppia motrice (Kr è il coefficiente di accoppiamento rotorico. Equazioni Esterne per la Dinamica Alimentazione con terna di tensioni concatenate che possono essere variate a piacere [v]=f(t). Carico rappresentato da una coppia resistente, Tr(t), che varia in funzione della applicazione Tm(t)=Tr(t)+Fm (t)+Jdm (t)/dt
. Carico rappresentato da una coppia resistente, Tr(t), che varia in funzione della applicazione Tm(t)=Tr(t)+Fm (t)+Jdm (t)/dt.")
44
Equazioni Interne per lo Stato Stazionario
Con la scelta del riferimento solidale con la pulsazione elettrica del sistema di alimentazione statorica, e, e imponendo la condizione di regime stazionario dove tutte le grandezze hanno il modulo costante e le eventuali derivate nulle, è possibile riscrivere le equazioni ricavate per il regime dinamici nello stato stazionario. In particolare: Divido ambo i membri della seconda equazione per lo scorrimento s ricordando che Le relazioni correnti/flussi nelle condizioni di stazionarietà diventano:

45
Sostituendo i flussi nelle equazioni elettriche
Ponendo Si ricavano le equazioni elettriche dello stato stazionario. La seconda equazione contiene un termine Rr/s. Ora si può ipotizzare di scomporre questo termine per mettere in evidenza la resistenza di rotore. Rappresenta il carico che varia con lo scorrimento s.

46
Dalle equazioni che descrivono lo stato stazionario possiamo ricavare il circuito equivalente di macchina valido in regime sinusoidale. Infine, introducendo la distinzione tra resistenza di rotore e resistenza di carico, si perviene al modello trasformatorico della macchina asincrona. Le grandezze elettriche sono fasori sincroni tra loro di pulsazione e. ~ Vfs Is Rs Ls Lr M Rr s Ir ~ Vfs Is Rs Ls Lr M (1-s)Rr s Ir Rr
Rr. s. Ir. Rr.")
47
Trasformazione Bifase =>Trifase
Il sistema di equazioni elettriche è un sistema le cui variabili sono vettori di componenti Che corrispondono a 4 equazioni scalari nei due assi. Tramite una nuova trasformazione bifase/trifase è possibile ottenere le stesse equazioni sul riferimento 123 di tempo dove sono riferite le variabili trifasi sfasate tra loro di 120°. Se ci riferiamo ad una singola fase

48
Espressione della Coppia in Regime Stazionario
Si era determinata l’espressione della coppia in regime dinamico: Se passiamo allo stato stazionario, Se riprendiamo l’equazione elettrica di rotore ed esplicitiamo il flusso Uguagliando la parte reale e la parte immaginaria dei due membri della equazione

49
Sostituendo i flussi nella espressione della coppia
I è il valore efficace della corrente Pcur potenza persa nel rotore. Questa relazione mostra che la potenza meccanica generata è pari alla potenza persa sul rotore divisa per lo scorrimento. La potenza meccanica generata viene ripartita tra rotore e carico.

50
Equazioni Interne per lo Stato Stazionario
Equazioni elettriche relative ad una singola fase di macchina Equazioni correnti/flussi in condizioni di stazionarietà diventano: Espressione per la coppia motrice Equazioni Esterne per lo Stato Stazionario Alimentazione con terna di tensioni concatenate sinusoidali. Per una singola fase, vf(t)=Vmsin(et). Carico rappresentato da una coppia resistente, Tr, costante Tm=Tr+Fm
=Vmsin(et). Carico rappresentato da una coppia resistente, Tr, costante. Tm=Tr+Fm.")
51
Caratteristica Meccanica Tm=f(n) o Tm=f(s)
Dalla espressione della coppia Tenendo conto che la corrente di rotore può essere espressa in termini di f.e.m. indotta e caratteristiche di rotore Essendo

52
Dallo studio della relazione
possiamo ricavare l’andamento grafico della caratteristica meccanica in funzione dello scorrimento Tm=f(s) Tm s Tmmax Tmn Tmsp smax sn Tm Tmmax Tmsp Tmn nrn nrsp nc Se al posto dello scorrimento s considero il n°di giri di rotore, nr=nc(1-s), sapendo che nc è costante con la frequenza, posso considerare il cambio di variabile nr=>1-s e la caratteristica cambierà forma ma non in modo significativo.
 Tm. s. Tmmax. Tmn. Tmsp. smax. sn. Tm. Tmmax. Tmsp. Tmn. nrn. nrsp. nc. Se al posto dello scorrimento s considero il n°di giri di rotore, nr=nc(1-s), sapendo che nc è costante con la frequenza, posso considerare il cambio di variabile nr=>1-s e la caratteristica cambierà forma ma non in modo significativo.")
54
Se s=0 => nr=nc;. Se s=0. 1 => nr=0. 9nc;. Se s=0. 2 => nr=0
Se s=0 => nr=nc; Se s=0.1 => nr=0.9nc; Se s=0.2 => nr=0.8nc; …………Se s=1 => nr=0; Dallo studio della funzione Tm=f(s) si ricavano informazioni utili sul funzionamento della macchina. Partendo dalla espressione ricavata, 1) Se s=0 => nr=nc => Tm=0 condizione di vuoto; 2) Se s=1 => nr=0 => Tm=Tspunto 3) Se s tende a 0 allora È una equazione di una retta che passa per l’origine con pendenza
 si ricavano informazioni utili sul funzionamento della macchina. Partendo dalla espressione ricavata, 1) Se s=0 => nr=nc => Tm=0 condizione di vuoto; 2) Se s=1 => nr=0 => Tm=Tspunto. 3) Se s tende a 0 allora. È una equazione di una retta che passa per l’origine con pendenza.")
55
4) Se s tende a 1 allora Rr<<Xr
Tm s Tmmax Tmn Tmsp smax sn 3 4 4) Se s tende a 1 allora Rr<<Xr 5) Determinazione della coppia massima
 Se s tende a 1 allora Rr<<Xr. 5) Determinazione della coppia massima.")
56
Il denominatore non può essere nullo. Possiamo annullare il numeratore
Tm s Tmmax smax Se lo inseriamo nella espressione della coppia, si determina l’espressione della coppia massima.

57
La coppia massima si ha in corrispondenza della ascissa
e vale Tmmax non dipende da Rr ma solo da Xr. Smax invece è direttamente proporzionale con Rr. Con una opportuna scelta di resistenze aggiuntive, è possibile modificare l’ascissa a cui corrisponde la coppia massima (Rc>Rb>Ra=Rr). Se Rr tende a 0, Tmmax viene raggiunta subito ma diminuisce la coppia di spunto. Man mano che Rr cresce, Tmax si sposta verso lo spunto. Se allo spunto desideriamo la coppia massima, possiamo dimensionare la resistenza aggiuntiva: Se smax=1 => Rc=Xr. Questo dato è importante per il dimensionamento del reostato di avviamento o delle sezioni delle gabbie
. Se Rr tende a 0, Tmmax viene raggiunta subito ma diminuisce la coppia di spunto. Man mano che Rr cresce, Tmax si sposta verso lo spunto. Se allo spunto desideriamo la coppia massima, possiamo dimensionare la resistenza aggiuntiva: Se smax=1 => Rc=Xr. Questo dato è importante per il dimensionamento del reostato di avviamento o delle sezioni delle gabbie.")
58
Avviamento delle Macchine Asincrone
Tm Rc Rb Ra no na nb nc=0 Tmc Tmb Tma Parimenti si può ragionare sulla caratteristica coppia funzione del numero di giri. Avviamento delle Macchine Asincrone Caso dei Rotori Avvolti Tradizionalmente, nel caso dei rotori avvolti, agli avvolgimenti di rotore venivano collegati in serie dei resistori di avviamento che venivano progressivamente disinseriti man mano che la macchina si avviava.

59
Esempio: avviamento a 3 sezioni
rotore T1 R T2 T3 Tr Tm Ta T3 T2 T1 Man mano che la macchina accelera, le resistenze vengono escluse ed il motore passa a funzionare su caratteristiche sempre più ripide. La Tm deve essere sempre Tm>Tr per accelerare la macchina e vincere la coppia di inerzia. Il disinserimento delle resistenze viene legato al numero di giri ed avviene automaticamente.

60
L’avviamento nei M.A. a gabbia
Fenomeni di addensamento di corrente Durante l’avviamento, la gabbia è investita dell’intero flusso generato dal campo rotante. Questo flusso, variabile nel tempo, induce delle f.e.m. nei conduttori di rotore. La condizione di corto fa si che circolino correnti che a loro volta generano un campo magnetico e quindi un flusso. Quest’ultimo flusso si concatena in maniera non uniforme con il conduttore di rotore. La sezione 4 si concatena con tutto il flusso mentre le sezioni 3, 2 ed 1, si concatenano con un flusso meno intenso. Ne segue che le f.e.m. indotte, e le correnti collegate, sono via via meno intense partendo dal fondo cava (4) all’inizio cava (1). Queste correnti hanno verso contrario alla causa che le generano e quindi la corrente circolante in cava si riduce in 4 rispetto ad 1 (effetto pelle).
 all’inizio cava (1). Queste correnti hanno verso contrario alla causa che le generano e quindi la corrente circolante in cava si riduce in 4 rispetto ad 1 (effetto pelle).")
61
Questo fenomeno è tanto più intenso quanto più elevata è la frequenza.
La doppia gabbia È composta da una gabbia più esterna di materiale con resistività più elevata e da una gabbia interna di materiale a bassa resistività (es. bronzo- alluminio). La doppia gabbia sfrutta questo fenomeno per far circolare più corrente nel circuito esterno, ad alta resistività. La corrente di spunto viene limitata al valore corretto per dare origine ad una buona coppia di spunto. Una volta in movimento, le frequenze delle grandezze elettriche di rotore calano, il confinamento della corrente perde di intensità, e la corrente tende a fluire nella barra a più bassa resistenza.
. La doppia gabbia sfrutta questo fenomeno per far circolare più corrente nel circuito esterno, ad alta resistività. La corrente di spunto viene limitata al valore corretto per dare origine ad una buona coppia di spunto. Una volta in movimento, le frequenze delle grandezze elettriche di rotore calano, il confinamento della corrente perde di intensità, e la corrente tende a fluire nella barra a più bassa resistenza.")
62
Gabbia a Barre Profonde
È composta da una gabbia a barra singola ma con una forma piuttosto allungata per sfruttare maggiormente l’effetto pelle ed il conseguente aumento di resistenza nei conduttori di rotore allo spunto. Nelle condizioni di regime, la frequenza ridotta fa si che la corrente fluisca normalmente nell’intera sezione. Le ultime due tipologie differiscono per i costi e per l’efficienza delle singole gabbie. A questo proposito, sono state studiate diverse forme di cave che hanno lo scopo di migliorare le condizioni di spunto e di dinamica rotorica ottimizzando la distribuzione dei flussi magnetici nelle varie condizioni di funzionamento.

63
Regolazione della Velocità
La Caratteristica Meccanica E’ il risultato della composizione di due contributi di coppia, quello relativo alla gabbia esterna a maggiore resistenza e quella interna a minore resistenza. Tm Ta Regolazione della Velocità Il campo di variazione della velocità di un m.a., in funzionamento normale, non è molto esteso (s%=> 1…6%). Se ho necessità di avere campi di variazione più estesi posso utilizzare diversi metodi, che presentano vantaggi e svantaggi, alcuni dei quali sono caduti in disuso. 1) Resistenze aggiuntive di rotore (rotore avvolto) Agli anelli di rotore viene collegato un reostato che permette di variare
. Se ho necessità di avere campi di variazione più estesi posso utilizzare diversi metodi, che presentano vantaggi e svantaggi, alcuni dei quali sono caduti in disuso. 1) Resistenze aggiuntive di rotore (rotore avvolto) Agli anelli di rotore viene collegato un reostato che permette di variare.")
64
Come si può notare dalla figura, la escursione rimane ancora
Con continuità la resistenza aggiuntiva di rotore da un valore nullo a quella necessaria ad ottenere la coppia di spunto massima. Variando la posizione del cursore si ottengono diverse caratteristiche che mi consentono di avere la stessa coppia di lavoro a diversi numeri di giri. Come si può notare dalla figura, la escursione rimane ancora Tm Ta Tmn limitata perché la zona di lavoro (zona di stabilità di funzionamento) presenta notevoli pendenze, limitando con ciò l’escursione. Questo metodo è stato abbandonato per le notevoli perdite Joule che si hanno sulle resistenze aggiuntive con forti cali di rendimento.
 presenta notevoli pendenze, limitando con ciò l’escursione. Questo metodo è stato abbandonato per le notevoli perdite Joule che si hanno sulle resistenze aggiuntive con forti cali di rendimento.")
65
2) Variazione del n°di poli di Statore (Rotore a Gabbia)
Se si considera l’espressione del n° di giri si vede che nr varia con p. La regolazione a gradini di nr può essere effettuata commutando le bobine che compongono l’avvolgimento per ottenere diverse configurazioni ad esempio, da quattro a due poli o viceversa. La commutazione viene effettuata in morsettiera È possibile ottenere lo stesso risultato realizzando più avvolgimenti di statore con un numero di poli molto diversi ed alimentando un avvolgimento per volta. Questa soluzione è adatta nel caso venga richiesto una variazione consistente del n°di giri.

66
Esempio di commutazione da 8 a 4 poli e viceversa
La regolazione della velocità avviene comunque a scatti e non con continuità. E’ possibile combinare le due diverse soluzioni ottenendo, ad esempio, 12 ed 8 poli, commutabili in 6 e 4. Questa tecnica viene impiegata nelle gru o nei montacarichi per movimentare carichi dal peso diversificato (pieno/vuoto), o nelle lavatrici per i diversi cicli di lavaggio e per la centrifugazione. Se si vuole regolare con continuità sia gli asincroni con rotore avvolto che quelli a gabbia, bisogna cambiare completamente strategia. 3) Variazione di Ampiezza della Tensione di Alimentazione Se riprendiamo l’espressione della coppia funzione dello scorrimento
, o nelle lavatrici per i diversi cicli di lavaggio e per la centrifugazione. Se si vuole regolare con continuità sia gli asincroni con rotore avvolto che quelli a gabbia, bisogna cambiare completamente strategia. 3) Variazione di Ampiezza della Tensione di Alimentazione. Se riprendiamo l’espressione della coppia funzione dello scorrimento.")
67
L’idea è di far variare Vf con continuità ricorrendo ad appositi dispositivi.
La velocità di sincronismo non dipende da Vf ma solo dalla frequenza; smax=Rr/Xr (indipendente da Vf ) determina la Tm max che dipende direttamente da (Vf)2 conosciamo la dipendenza di Tm sp da (Vf)2. Se s=1 allora Si può concludere che la modifica di Vf si ha una modifica dei valori della caratteristica ma non viene modificato il suo andamento al variare dello scorrimento.
 determina la Tm max. che dipende direttamente da (Vf)2. conosciamo la dipendenza di Tm sp. da (Vf)2. Se s=1 allora. Si può concludere che la modifica di Vf si ha una modifica dei valori della caratteristica ma non viene modificato il suo andamento al variare dello scorrimento.")
68
Si possono ottenere piccole variazioni di velocità sotto carico.
Si ottiene così una variazione della velocità del motore in corrispondenza di una determinata coppia resistente, Tr, costante. Si possono ottenere piccole variazioni di velocità sotto carico. Se Vf cala, s cala ed Is cresce. Tm Tmsp Tr T’msp Aumenta, cioè la corrente assorbita per uno stesso valore di Tr. Infatti, a parità di Tr e quindi di Tm, la potenza assorbita rimane costante. Se cala Vf deve aumentare Is. Is può aumentare fino al valore nominale. E’ un metodo inefficiente; funziona per variazioni del 10% del n° di giri. 4) Variazione della Frequenza di Alimentazione Se si considera di nuovo la relazione n°=f(frequenza) questa evidenzia la possibilità di variare la velocità del rotore agendo
 Variazione della Frequenza di Alimentazione. Se si considera di nuovo la relazione n°=f(frequenza) questa evidenzia la possibilità di variare la velocità del rotore agendo.")
69
Rr/s lo possiamo vedere come Rre/se e quindi (Rr/se)e (f)
sulla frequenza di alimentazione del motore. Se varia f => varia e e variano, di conseguenza, Xs ed Xr. Rr/s lo possiamo vedere come Rre/se e quindi (Rr/se)e (f) dove se è la frequenza di scorrimento che è comunque bassa e quindi risente molto meno della variazione di e. Sincronismo: variando f varia n0 (s=0) in modo lineare che è quello che si vuole. Si hanno degli effetti sugli altri parametri caratteristici, in particolare, Spunto: per s=1 e nella ipotesi che Rr<<Xr Se f cala la Tmsp cresce proporzionalmente a e viceversa.
e (f) dove se è la frequenza di scorrimento che è comunque bassa e quindi risente molto meno della variazione di e. Sincronismo: variando f varia n0 (s=0) in modo lineare che è quello che si vuole. Si hanno degli effetti sugli altri parametri caratteristici, in particolare, Spunto: per s=1 e nella ipotesi che Rr<<Xr. Se f cala la Tmsp cresce proporzionalmente a. e viceversa.")
70
Ora la espressione della coppia massima è
La condizione di coppia massima è smax= Rr/ Xr = Rr/eLr => smax= K(1/e) per cui esmax= Rr/ Lr = cost (se e cala smax cresce e viceversa). Ora la espressione della coppia massima è Curve al variare di f: Con queste informazioni è possibile tracciare la famiglia di curve al variare di f . Sia n0 il n° di giri per f=50Hz. Si consideri una diminuzione di frequenza. Ora se f cala, cala e con Vf costante. Tm
 per cui esmax= Rr/ Lr = cost (se e cala smax cresce e viceversa). Ora la espressione della coppia massima è. Curve al variare di f: Con queste informazioni è possibile tracciare la famiglia di curve al variare di f . Sia n0 il n° di giri per f=50Hz. Si consideri una diminuzione di frequenza. Ora se f cala, cala e con Vf costante. Tm.")
71
La impedenza di ingresso della macchina è
se f cala => n° di giri cala ma la corrente Is cresce in ragione di 1/e così come Pa e Tm cresce in ragione di 1/(e2). Ciò e vero fino ad un certo punto perché interviene la saturazione del circuito magnetico. In saturazione, la corrente cresce ma il flusso resta (quasi) costante, quindi la coppia resta (quasi) costante. In queste condizioni, l’abbassamento della frequenza provoca un forte assorbimento di corrente e di potenza a cui non corrisponde un eguale innalzamento di coppia.
. Ciò e vero fino ad un certo punto perché interviene la saturazione del circuito magnetico. In saturazione, la corrente cresce ma il flusso resta (quasi) costante, quindi la coppia resta (quasi) costante. In queste condizioni, l’abbassamento della frequenza provoca un forte assorbimento di corrente e di potenza a cui non corrisponde un eguale innalzamento di coppia.")
72
La macchina si scalda (aumento di perdite Joule) senza che la coppia ne risenta.
Si consideri un aumento di frequenza sopra i 50 Hz ed n0 passa a valori n0a, n0b, etc. Si nota che per n0b => Tm>Tmmax . Superato un certo valore di frequenza, veniamo a perdere coppia e quindi cala la Tr che può essere assunta come carico. La variazione della frequenza f a Vf=costante è una tecnica di regolazione poco efficace perché va bene per piccole variazioni attorno ai giri nominali, poi se si cala troppo f la macchina scalda senza produrre coppia, se f cresce, si perde rapidamente coppia. Tm

73
~ 5) Regolazione Tensione/Frequenza
Al fine di ottenere una buona regolazione, garantendo nel contempo un buon funzionamento del sistema, è opportuno che siano verificate le seguenti condizioni : A) la corrente a vuoto, e quindi il flusso al traferro, non deve superare il valore nominale per evitare la saturazione del circuito magnetico ed eccessive perdite nel ferro; B) Le correnti di statore e di rotore non devono superare i rispettivi valori nominali per evitare riscaldamenti nel motore e sovradimensionamenti del convertitore. C) Le tensioni di alimentazione non devono superare i valori nominali per i quali sono stati dimensionati gli isolamenti di macchina. Per il normale funzionamento, possiamo fare riferimento allo schema circuitale equivalente di fase (equivalente trasformatorico). ~ Vfs Is Rs Ls Lr M Rr s Ir
 la corrente a vuoto, e quindi il flusso al traferro, non deve superare il valore nominale per evitare la saturazione del circuito magnetico ed eccessive perdite nel ferro; B) Le correnti di statore e di rotore non devono superare i rispettivi valori nominali per evitare riscaldamenti nel motore e sovradimensionamenti del convertitore. C) Le tensioni di alimentazione non devono superare i valori nominali per i quali sono stati dimensionati gli isolamenti di macchina. Per il normale funzionamento, possiamo fare riferimento allo schema circuitale equivalente di fase (equivalente trasformatorico). ~ Vfs. Is. Rs. Ls. Lr. M. Rr. s. Ir.")
74
Se si riporta il secondario al primario sfruttando il rapporto di trasformazione.
~ Vfs Is Rs Ls Lrs Rrs s Nella ipotesi che Si supponga di partire dalle condizioni nominali e di voler regolare la velocità a partire da questa condizione. Sia f= f. Con >1 si indica aumento e con <1 si indica diminuzione della frequenza di alimentazione. Riduzione della velocità (<1) E’ stato già mostrato che Ef
 E’ stato già mostrato che Ef")
75
Ne segue che per avere il flusso costante la E deve variare con f
Ne segue che per avere il flusso costante la E deve variare con f. Nella ipotesi semplificativa che Vf=Es, allora la alimentazione deve essere predisposta per ottenere un rapporto Vf/f= cost per ogni valore di <1. Deve essere verificato che Le caratteristiche Tm=f(n) e Tm=f(s) si modificano come segue Scorrimento: Dalla => => s è inversamente proporzionale ad . In particolare, Al diminuire di f, s ed smax aumentano della stessa proporzione.
 e Tm=f(s) si modificano come segue. Scorrimento: Dalla => => s è inversamente proporzionale ad . In particolare, Al diminuire di f, s ed smax aumentano della stessa proporzione.")
76
Coppia Motrice: dalla sua espressione la coppia nominale è indipendente da . In particolare, la coppia massima, Tmmax Anche la coppia massima è indipendente da , solo che si ottiene per uno scorrimento

77
Numero di Giri a Vuoto: Il n° di giri varia in maniera direttamente proporzionale con . Coppia di Spunto: se Rr<<Xr Al variare di , Tmsp varia in maniera inversamente proporzionale (se cala Tmsp cresce e viceversa).
.")
78
La potenza meccanica varia in diretta proporzione con
ma La potenza meccanica varia in diretta proporzione con Riassumendo: Tm Tmmax Nella parte bassa delle caratteristiche vi è una somiglianza con le caratteristiche di regolazione dei motori cc. Tmn

79
Incremento della Velocità (>1)
Se si aumenta la frequenza di alimentazione (f=f>f ) lo si deve fare a tensione costante perché Vf non può superare la tensione nominale. Il flusso al traferro deve quindi decrescere (condizione di deflussaggio) per mantenere la f.e.m. costante (Ef). La frequenza può essere aumentata fino ad un valore limite (fl=lf ) definito dalle condizioni costruttive. Si esaminano di nuovo le caratteristiche Tm=f(n) e Tm=f(s). Scorrimento: Se è indipendente dalla frequenza. Quindi mentre rimane inversamente proporzionale ad
 lo si deve fare a tensione costante perché Vf non può superare la tensione nominale. Il flusso al traferro deve quindi decrescere (condizione di deflussaggio) per mantenere la f.e.m. costante (Ef). La frequenza può essere aumentata fino ad un valore limite (fl=lf ) definito dalle condizioni costruttive. Si esaminano di nuovo le caratteristiche Tm=f(n) e Tm=f(s). Scorrimento: Se è indipendente dalla frequenza. Quindi. mentre. rimane inversamente proporzionale ad ")
80
Coppia Motrice: dalla sua espressione Anche la coppia nominale è inversamente proporzionale ad . Per la coppia massima, Tmmax e si ottiene per uno scorrimento

81
Numero di Giri a Vuoto: Sono ancora direttamente proporzionali ad (>1). Coppia di Spunto: se Rr<<Xr Al variare di , Tmsp varia in maniera inversamente proporzionale al cubo di .

82
La potenza meccanica rimane costante al variare di . Osservazione:
al crescere della frequenza, la coppia Tm diminuisce secondo 1/ mentre la coppia massima decresce con 1/2. Ci sarà un punto in cui la coppia nominale eguaglia la coppia massima (f’= ’f). sapendo che: Tm Tmmax Tmn
. sapendo che: Tm. Tmmax. Tmn.")
83
Se si osserva il grafico, restano definite due zone di funzionamento:
’ si determina immediatamente eguagliando le espressioni della coppie. Se si osserva il grafico, restano definite due zone di funzionamento: Tm Tmmax Tmn A) 1< < ’ la coppia è inversamente proporzionale ad ; lo scorrimento relativo alla coppia nominale è indipendente da ; la potenza convertita in meccanica è indipendente da (funzionamento a potenza costante; la coppia massima, superiore a quella nominale, decresce con 1/2. B) ’<<l la coppia massima è inferiore a quella nominale e decresce sempre con 1/2. La potenza convertita, legata alla coppia nominale, non può rimanere
 1< < ’ la coppia è inversamente proporzionale ad ; lo scorrimento relativo alla coppia nominale è indipendente da ; la potenza convertita in meccanica è indipendente da (funzionamento a potenza costante; la coppia massima, superiore a quella nominale, decresce con 1/2. B) ’<<l. la coppia massima è inferiore a quella nominale e decresce sempre con 1/2. La potenza convertita, legata alla coppia nominale, non può rimanere.")
84
costante. La corrente assorbita deve calare per inseguire la diminuzione di coppia massima e lo deve fare in ragione dell’inverso di . La potenza assorbita e tramutata in meccanica risulta quindi inversamente proporzionale ad ed il motore funziona con corrente rotorica inferiore al valore nominale. Riassunto: Tm Tmmax Tmn

85
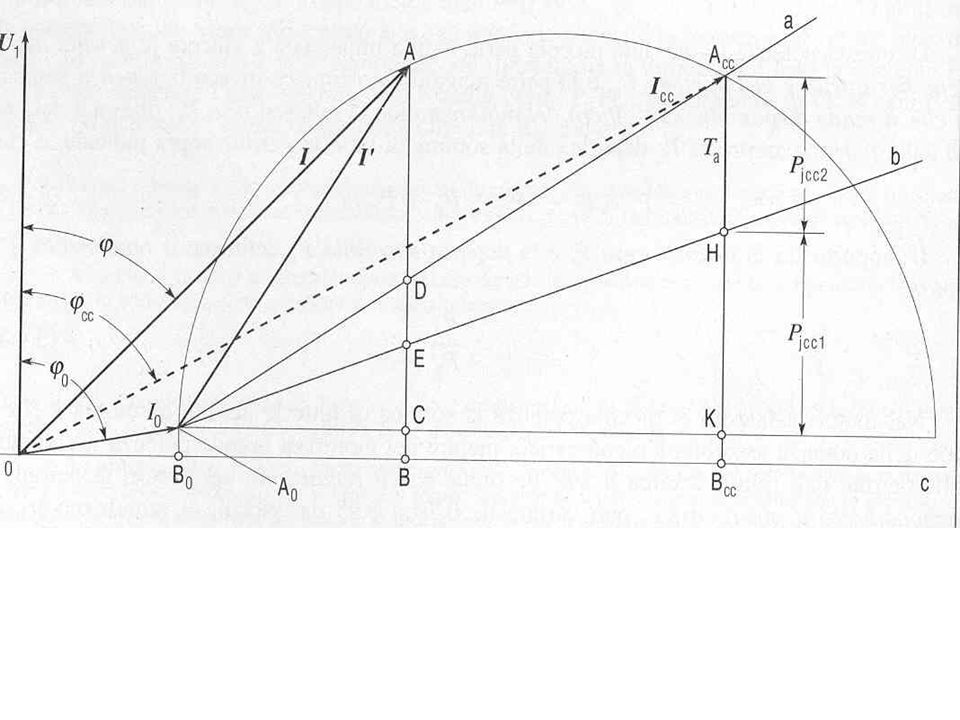
Il Diagramma Circolare
Curva caratteristica che lega le correnti di macchina allo scorrimento. È una caratteristica caduta in disuso. È ancora usata per descrivere una macchina asincrona a rotore avvolto per applicazioni a velocità praticamente costante.

87
Bilancio di Potenze e Rendimento
Perdite costanti al variare del carico: perdite a vuoto nel ferro attivo e perdite addizionali nelle altre parti metalliche. Perdite meccaniche per attrito e ventilazione Tali perdite corrispondono alle perdite a vuoto P0=Pfe+Pm Perdite variabili con il carico: perdite per effetto Joule nell’avvolgimento di statore perdite per effetto Joule nell’avvolgimento di rotore (comprese le eventuali perdite nelle spazzole e nelle resistenze aggiuntive, se previste) Perdite addizionali sotto carico: perdite dovute al carico nel ferro attivo e nelle altre parti metalliche, esclusi i conduttori perdite per correnti parassite nei conduttori degli avvolgimenti di rotore e statore
 Perdite addizionali sotto carico: perdite dovute al carico nel ferro attivo e nelle altre parti metalliche, esclusi i conduttori. perdite per correnti parassite nei conduttori degli avvolgimenti di rotore e statore.")
88
perdite dovute alle armoniche del campo rotante
Il rendimento:

89
Esempio di dimensionamento di macchina
Si vuole dimensionare un motore accoppiato ad una slitta con trasmissione a vite con ricircolo di sfere e cuscinetti assiali a rulli. Dati: Massa della slitta: ms=10 kg Massa del pezzo: mp=40 kg Passo della vite: p=5mm Lunghezza della vite: L=0.5m Diametro della vite: d=25mm Densità dell'acciaio: =7.75 kg/dm3 Rendimento della trasmissione: =60% Coefficiente di attrito acciaio-acciaio: =0.15 Il pezzo deve compiere un ciclo di lavoro ripetitivo caratterizzato dal profilo cinematico di figura. Con riferimento ai simboli utilizzati, i dati sono i seguenti:

90
Tempo di accelerazione: t1=0.167 s
Tempo di velocità costante: t2=0.167 s Tempo di decelerazione: t3=0.167 s Durata della lavorazione: T1=0.5 s Durata della pausa: T2=0.25 s Avanzamento del pezzo: S=0.15 m Calcolo dei momenti di inerzia Per il dimensionamento del servomotore è essenziale il calcolo delle coppie di carico; il primo passo è dunque la determinazione dei momenti di inerzia delle parti coinvolte, riportati all'albero motore. Massa della vite: suo momento di inerzia: Data, la rigidità della trasmissione (anelastica), si può riportare all'albero motore l'intera massa del carico mp e della slitta ms calcolando il momento di inerzia delle masse riflesse sull’albero:
, si può riportare all albero motore l intera massa del carico mp e della slitta ms calcolando il momento di inerzia delle masse riflesse sull’albero:")
91
il momento di inerzia equivalente è
Calcolo della velocità massima. Si analizza adesso il profilo di velocità richiesto dalla particolare applicazione. La velocità massima del carico (VM) si ricava considerando che i tempi di esecuzione del profilo di velocità sono imposti, come pure l'avanzamento totale del pezzo nel ciclo. Si può calcolare lo spazio percorso. Sia a la accelerazione del pezzo:
 si ricava considerando che i tempi di esecuzione del profilo di velocità sono imposti, come pure l avanzamento totale del pezzo nel ciclo. Si può calcolare lo spazio percorso. Sia a la accelerazione del pezzo:")
92
Si può ora calcolare la massima velocità angolare del motore
Si può ora calcolare la massima velocità angolare del motore. Se VM è la massima velocità lineare, VM/p è il numero di giri al secondo e la pulsazione vale: Calcolo della coppia di accelerazione. La accelerazione del motore si calcola rapidamente: Alla quale corrisponde una coppia di accelerazione del carico esterno pari a

93
Oltre alla coppia inerziale, va tenuta in conto la coppia di attrito rapportata al motore. Il coefficiente di attrito acciaio su acciaio lubrificato è riportato tra i dati iniziali. La forza d'attrito del carrello e del carico sul piano di supporto vale: Questa forza rappresenta una ulteriore coppia da vincere, considerando una efficienza del 60%, Il motore è chiamato a vincere una coppia di carico data da Dimensionamento del servomotore si sceglie un motore che abbia una coppia nominale superiore ad almeno due volte quella richiesta:

94
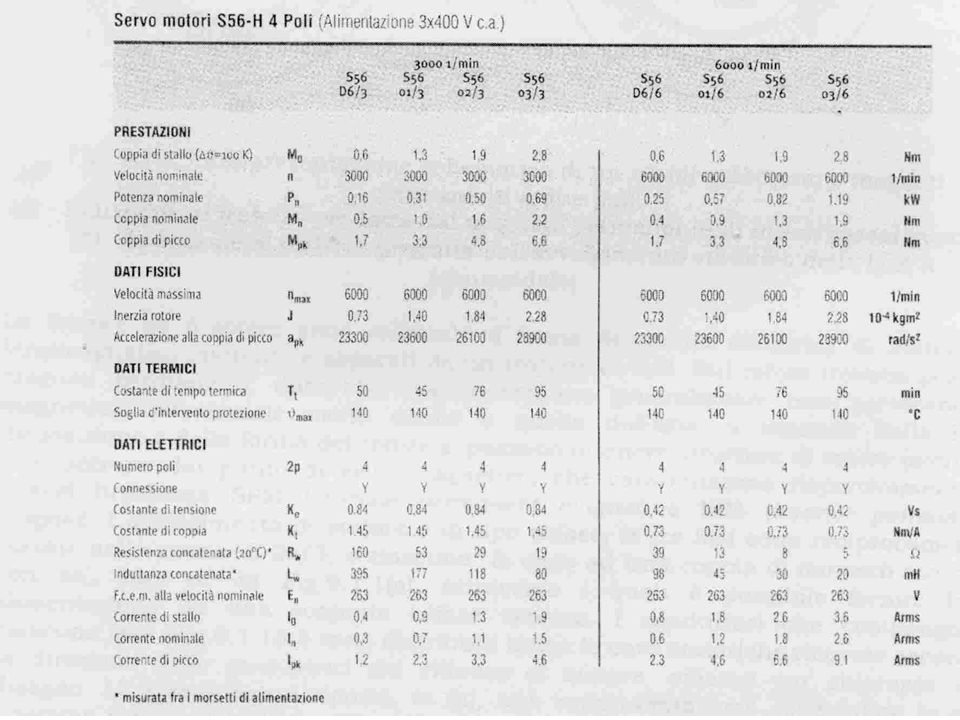
Ed una velocità nominale almeno pari a quella massima calcolata
Dal catalogo (la parte saliente è riportata nella ppt seguente), si sceglie il motore D56-03/6, che ha una coppia nominale di 1.9 Nm alla velocità nominale di 6000 rpm. Il suo momento di inerzia è di 2.28 * 10-4 kgm2 e la sua coppia massima vale 6.6 Nm. Verifica della scelta del motore Viene calcolato innanzi tutto il momento di inerzia totale: La coppia che deve erogare il motore durante la accelerazione vale: in cui si è tenuto un margine del 20% per considerare eventuali imprecisioni nella determinazione dei momenti di inerzia.
, si sceglie il motore D56-03/6, che ha una coppia nominale di 1.9 Nm alla velocità nominale di 6000 rpm. Il suo momento di inerzia è di 2.28 * 10-4 kgm2 e la sua coppia massima vale 6.6 Nm. Verifica della scelta del motore. Viene calcolato innanzi tutto il momento di inerzia totale: La coppia che deve erogare il motore durante la accelerazione vale: in cui si è tenuto un margine del 20% per considerare eventuali imprecisioni nella determinazione dei momenti di inerzia.")
96
Si può notare che essendo tale coppia inferiore non solo alla coppia massima (requisito indispensabile) ma anche alla coppia nominale, non vi saranno imposizioni nel funzionamento circa la massima durata delle accelerazioni. La coppia durante la decelerazione risulta inferiore a quella durante l'accelerazione, perché gli attriti in questo caso operano una favorevole azione frenante: Agli effetti termici, che sono quelli che determinano il dato di targa della coppia nominale, è importante valutare la coppia efficace: È una media quadratica perchè, intuitivamente, gli effetti del riscaldamento variano con il quadrato della corrente, che in un servomotore brushless è direttamente proporzionale alla coppia richiesta.

97
Il motore selezionato risulta confermato dato che vengono soddisfatte le diseguaglianze

Presentazioni simili