Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
SENSORI NEI SISTEMI DI PRODUZIONE
Ultimo aggiornamento: 28/11/11 Prof. Gino Dini – Università di Pisa

2
Sensori Principali scopi dei sensori nei sistemi di produzione:
fornire un segnale di ritorno al controllore monitorare lo stato del sistema o dall’ambiente esterno segnalare situazioni impreviste operare in ambienti non strutturati riconoscere un oggetto determinare la posizione e l’orientamento di un oggetto

3
Sensori Sensori di contatto Sensori di forza Sensori di prossimità
Sensori di distanza Sistemi di visione

4
Sensori di contatto: microinterruttori

5
Sostituzione placchetta
Tastatore Sì Modifica correttori Usura entro i limiti ? No Sostituzione placchetta

6
Sensore tattile piezo-resistivo TekScan
numero di elementi sensibili: tipicamente per sensore densità spaziale: fino a 248 elementi per cm2 temperatura di lavoro da -9 a 60° C dimensioni elemento sensibile da 3 x 3 mm a 578 x 884 mm campi di misura della pressione da 0 a 175 MPa spessore del sensore: 0,1 mm

7
Sensore tattile

8
Sensore tattile

9
Sensori Sensori di contatto Sensori di forza Sensori di prossimità
Sensori di distanza Sistemi di visione

10
Sensore di forza F = K Dx

11
Sensore di forza (on-off)
")
12
Sensore di forza (analogico)
Polso del robot Sensore di forza Gripper

13
Sensore di forza (analogico)
")
14
Sensore di forza analogico ATI 330
Campo di lavoro: Fx, Fy ± 330 N Fz ± 660 N Tx, Ty, Tz ± 30 Nm Risoluzione: Fx, Fy, Fz 0,25 N Tx, Ty, Tz 0,015 Nm Dimensioni: 92 x 29 mm Peso: 0,81 kg Carichi massimi amissibili: Fx, Fy N Fz N Tx, Ty, Tz 340 Nm

15
Esempio di utilizzo sensore di forza
Z-axis force dFz/dt top compression ring oil ring bottom compression ring z Detection of missing parts by force sensor

16
Sensori Sensori di contatto Sensori di forza Sensori di prossimità
Sensori di distanza Sistemi di visione

17
Sensore di prossimità

18
Sensore di prossimità induttivo

19
Sensore di prossimità ad effetto Hall

20
Sensore di prossimità capacitivo

21
Sensore di prossimità capacitivo

22
Sensore di prossimità capacitivo

23
Impiego sensore di prossimità

24
Sensori Sensori di contatto Sensori di forza Sensori di prossimità
Sensori di distanza Sistemi di visione

25
Sensore a ultrasuoni

26
Sensore laser a triangolazione

27
Sensore laser a triangolazione

28
Utensile per saldatura all’arco elettrico

29
Sensore laser a slittamento di fase

30
Sensori Sensori di contatto Sensori di forza Sensori di prossimità
Sensori di distanza Sistemi di visione

31
Sistema di visione

32
Sistema di visione Acquisizione immagine Memoria di quadro
Gripper Sistema di illuminazione Elaborazione immagine Analisi immagine Telecamera Pezzo UG robot

33
Telecamera CCD

34
Sistemi di illuminazione
con luce diffusa con luce diretta in controluce con luce strutturata con luce radente

35
Illuminazione con luce diffusa

36
Illuminazione con luce diretta
4-sector optical fiber Toroidal mirror Parabolic mirror Camera lens Part Z movement

37
Illuminazione in controluce

38
Illuminazione con luce strutturata

39
Illuminazione con luce radente

40
Conversione A/D

41
Memoria di quadro 220 122 63 65 188 22 4 111 89 103 28 5 10 98 199 101 43 150 203 55 56 190 53

42
Memoria di quadro A/D

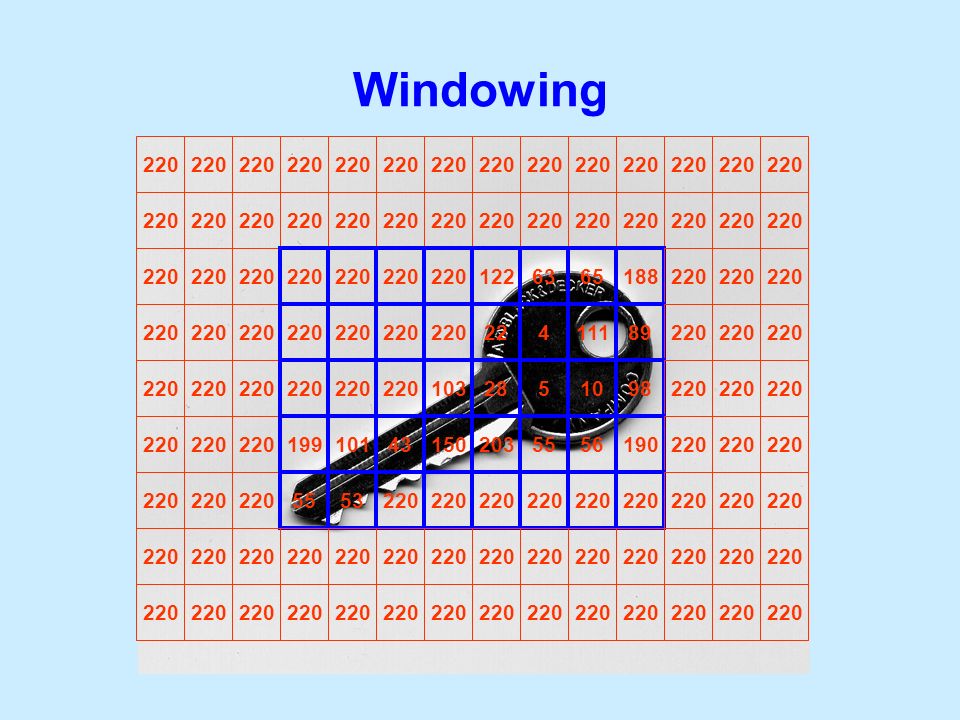
43
Windowing 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 122 63 65 188 220 220 220 220 220 220 220 220 220 220 22 4 111 89 220 220 220 220 220 220 220 220 220 103 28 5 10 98 220 220 220 220 220 220 199 101 43 150 203 55 56 190 220 220 220 220 220 220 55 53 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220
44
Binarizzazione

45
Filtraggio w1 w2 w3 w4 w5 w6 w7 w8 w9 220 w1 w2 w3 w4 w5 w6 w7 w8 w9
122 63 65 188 220 220 220 220 220 220 220 220 220 220 22 4 111 89 220 220 220 220 220 220 220 220 220 103 28 5 10 98 220 220 220 220 220 220 199 101 43 150 203 55 56 190 220 220 220 220 220 220 55 53 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220 220

46
Filtraggio

47
Feature detection Area Perimetro Diametro Centro di gravità Snellezza
Numero di fori Livello di grigio (massimo, medio o minimo) Minimo rettangolo circoscritto
 Minimo rettangolo circoscritto.")
48
Edge detection

49
Sistema di monitoraggio dello stato dell’utensile (TCM)
Cosa ? usura, integrità. Perché ? elemento più debole del sistema macchina-utensile-pezzo Scopo: monitorare il processo di taglio e lo stato dell’utensile (usura, integrità) permettere una produzione unmanned ottimizzare l’utilizzo delle risorse Definizione di tool condition monitoring
 permettere una produzione unmanned. ottimizzare l’utilizzo delle risorse. Definizione di tool condition monitoring.")
50
Sistema di monitoraggio dello stato dell’utensile (TCM)
Il TCM consta di tre fasi Permette nel suo complesso di

51
Classificazione dei sistemi TCM
Sistemi indiretti (in-process) Sistemi diretti (out-of-process) Sistemi integrati a bordo macchina Sistemi integrati nel corpo utensile
 Sistemi diretti (out-of-process) Sistemi integrati a bordo macchina. Sistemi integrati nel corpo utensile.")
52
Sistemi indiretti - Step 1: misura
Monitorare alcune caratteristiche del processo Sulla macchina Sull’utensile Sul pezzo

53
Esempio di misura a bordo macchina

54
Esempio di misura a bordo utensile

55
Sistemi indiretti - Step 2: elaborazione

56
Sistemi indiretti - Step 2: elaborazione

57
Sistemi indiretti - Step 3: decisione
limiti rottura

58
Sistemi indiretti - Step 3: decisione
pattern recognition filettatura incompleta

59
Classificazione dei sistemi TCM
Sistemi indiretti (in-process) Sistemi diretti (out-of-process) Sistemi integrati a bordo macchina Sistemi integrati nel corpo utensile
 Sistemi diretti (out-of-process) Sistemi integrati a bordo macchina. Sistemi integrati nel corpo utensile.")
60
Sistemi diretti – Integrità utensile

61
Sistemi diretti – Usura utensile

Presentazioni simili



















