Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici SLAM Simultanea localizzazione e mappatura di veicoli autonomi in ambiente non strutturato

2
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Strutturato: -Ingegnerizzazione dell’ambiente -Bassa flessibilità -Conoscenza a priori della mappa Non strutturato: -Non necessita di infrastrutture -Alta flessibilità -Costruzione mappa in tempo reale Passi fondamentali per interagire con ambiente non-strutturato: - navigazione e propagazione incertezza mediante sistemi di misura autocontenuti - autolocalizzazione mediante landmark naturali - fusione tra navigazione incrementale e quella riferita all’ambiente - mappatura dell’ambiente stesso Ambiente in cui il robot opera

3
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici - Veicolo a guida differenziale - Sistema di acquisizione PXI LabView RTOS ParametroIncertezzaRange distanze5 cm7-50 m angoli0.1 °0-180 ° - Laser a scansione IR [SICK PLS-101] : Tempo di volo Risoluzione angolare max: 0.5° Campo di scansione: (0°,180°) Distanza massima: 50 m Accuratezza = f(orientazione relativa,materiali) - 2 Encoder incrementali : n o :4000 n o :4000 Veicolo e strumentazione
 Distanza massima: 50 m Accuratezza = f(orientazione relativa,materiali) - 2 Encoder incrementali : n o :4000 n o :4000 Veicolo e strumentazione.")
4
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici ParametroValore Nominale µ Deviazione standard σR 89.50 mm0.14 mm RLRL 89.50 mm0.14 mm L89.50 mm0.5 mm b89.50 mm0.5 mm Equazione cinematica di ricorrenza: Equazione cinematica di ricorrenza(PLS): Covarianza della posa: Propagazione incertezza: [x,y,δ] δ PLS R ΔLS b θ LS α i,j RLRL Parametri incerti: Propagazione incertezza odometrica
: Covarianza della posa: Propagazione incertezza: [x,y,δ] δ PLS R ΔLS b θ LS α i,j RLRL Parametri incerti: Propagazione incertezza odometrica.")
5
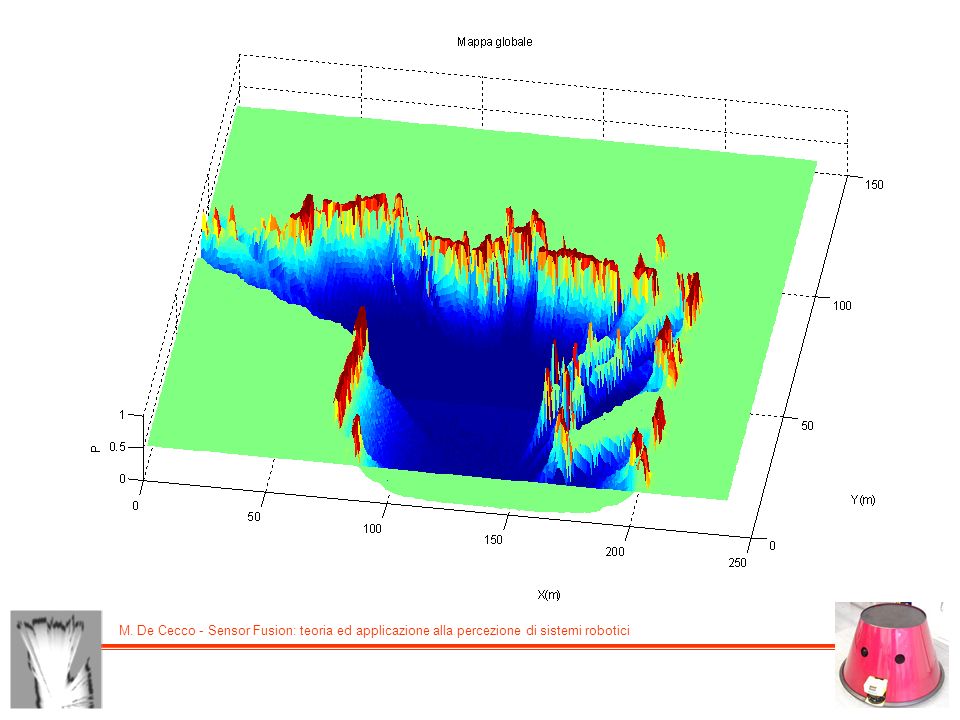
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Mappatura

6
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Modello rappresentativo dell’ambiente in cui il robot stesso si trova immerso: Occupancy Grids - Suddivisione ambiente in celle disposte a griglia - Ogni cella ha probabilità di essere occupata o non-occupata - Costruzione del modello del sensore Mappatura – caso monodimensionale Caso laser: σ r = 5 cm z = misura x = distanza reale s = stato di occupazione Distribuzione probabilistica O/E: 1 Occupazione 0.5 Nessuna informazione 0 Non occupazione

7
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Modello rappresentativo dell’ambiente in cui il robot stesso si trova immerso -Occupancy Grids -Suddivisione ambiente in griglia area 10x10 m cella 5x5 cm - Ogni cella ha probabilità di essere occupata o non-occupata - Costruzione del modello del sensore Estensione al caso 2D: σ r =5cm σ θ =0.5° Ambiente realeAmbiente mappato Distribuzione O/E Mappatura – caso bidimensionale Distribuzione probabilistica O/E OPPOSTA: 0 Occupazione 0.5 Nessuna informazione 1 Non occupazione

8
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Mappatura – singolo raggio laser z : l’angolo misurato

9
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici La O, ovvero occupied region viene definita nell’intervallo: Linea continua blu: Mappatura – singolo raggio laser

10
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici La E, ovvero empty region viene definita nell’intervallo: Linea tratto-punto blu: Mappatura – singolo raggio laser Linea continua blu:

11
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Distribuzione probabilistica O/E: 1 Occupazione 0.5 Nessuna informazione 0 Non occupazione Rappresentazione mediante livelli di grigio Mappatura – modello bidimensionale polare

12
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici PUNTI SCANSIONATIMAPPA LOCALE MAPPA CON INCERTEZZA Filtraggio gaussiano: Mappatura Fusione Bayesiana: (ricorsiva tra le mappe date dai singoli raggi laser)
.")
13
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Mappatura – Fusione Bayesiana Dove: - mappa o singola cella - posa del veicolo - misure laser dalla 1a alla t-esima - mappa data dalla t-esima scansione - mappa data dalle 1:t-1 scansioni precedenti - conoscenza a priori sulla mappa

14
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Mappatura – associazione mappe singoli raggi

15
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Mappatura – associazione mappe scansioni

16
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici

18
Mappatura – associazione mappe singoli raggi

19
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Mappatura e localizzazione – Algoritmo completo

20
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici 1. Rototraslazione - secondo misura encoder 2. Associazione - nell’intorno incertezza encoder (dominio cartesiano) si cercano features corrispondenti 3. Determinazione correzione di posa – considerando solo le features associate si minimizza la somma delle distanze pesate funzione della correzione di posa 4. Fusione tra posa odometrica e correzione ricavata Localizzazione – passi dell’algoritmo
 si cercano features corrispondenti 3. Determinazione correzione di posa – considerando solo le features associate si minimizza la somma delle distanze pesate funzione della correzione di posa 4. Fusione tra posa odometrica e correzione ricavata Localizzazione – passi dell’algoritmo.")
21
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici - Estrazione segmenti - Segmentazione punti - Determino parametri e incertezza Aggiungi al cluster Nuovo cluster Localizzazione - clusterizzazione

22
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Presenza di punti occlusi - Estrazione angoli: segmenti adiacenti con differenza di orienzazione a 90° - Estrazione spigoli: estremi di segmenti non occlusi - Estrazione punti isolati (foreground point): punti che non appartengono a segmenti - Inizio di parti occluse: - Punti solo apparentemente isolati Localizzazione – estrazione Features
: punti che non appartengono a segmenti - Inizio di parti occluse: - Punti solo apparentemente isolati Localizzazione – estrazione Features.")
23
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Vantaggi: riduzione informazioni da elaborare considera solo le caratteristiche rilevanti Svantaggi: l’estrazione è influenzata dalla tecnologia del sensore (clock counter per le zebrature) Localizzazione – estrazione Features Esempio di ‘zebrature’
 Localizzazione – estrazione Features Esempio di ‘zebrature’.")
24
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici - Stima Rototraslazione relativa - Funzione per il cambio di prospettiva - Data association: - definito un certo livello di tolleranza lateralmente di solito non si hanno associazioni Localizzazione – associazione features Weighting functions:

25
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Iterating Closest Point Localizzazione a partire da insiemi di features di Fb: Si determinano i Closest Point su Fa Si calcola R e T Si applica la trasformazione a Fb Se l ’ errore quadratico medio pesato è inferiore ad una certa soglia Localizzazione – metodo ICP

26
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici L’algoritmo ICP può essere schematizzato nel seguente modo: 1. Per ogni feature appartenente all’insieme Fb, si calcola quella più vicina della stessa categoria appartenente all’insieme Fa; 2. Con le corrispondenze calcolate nello step 1, calcola la trasformazione di rototraslazione [R t] 3. Si applica la trasformazione [R t] all’insieme Fb; 4. Se l’errore quadratico medio è minore di una certa soglia, l’algoritmo termina, altrimenti si ricomincia dallo step 1. NOTA: - ad ogni iterazione ciò che varia è il set di associazioni (in caso negativo si è giunti in un minimo locale) - L’algoritmo ICP converge sempre monotonicamente al minimo locale rispetto alla distanza quadratica media della funzione oggetto, che è quindi oggetto di valutazione e scelta accurata Localizzazione – metodo ICP
 - L’algoritmo ICP converge sempre monotonicamente al minimo locale rispetto alla distanza quadratica media della funzione oggetto, che è quindi oggetto di valutazione e scelta accurata Localizzazione – metodo ICP.")
27
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici - Determinazione incertezza localizzazione - Raggio spettrale matrice Cov - Viene ad essere determinata l’incertezza a partire dal numero di features che partecipano al marching Taratura Rototraslazioni in ambienti reali noti mediante guida prismatica ed encoder - Prove eseguite con differenti ambienti reali, caratterizzati da diversi tipi e numero di punti invarianti

28
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici - Fusione Bayesiana: si combina l’informazione precedente (Encoder) con l’informazione del sensore (ICP) in modo da calcolare la distribuzione posteriore: Osservazioni: - in presenza di rotazioni repentine del veicolo gli encoder sovrastimano - si nota l’accumulo di deriva del solo metodo odometrico Fusione
 con l’informazione del sensore (ICP) in modo da calcolare la distribuzione posteriore: Osservazioni: - in presenza di rotazioni repentine del veicolo gli encoder sovrastimano - si nota l’accumulo di deriva del solo metodo odometrico Fusione.")
29
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Sono stati fatti compiere al veicolo 2 giri del laboratorio per verificare i metodi sviluppati

30
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Mappa da encoderMappa da fusione Vetrate Incongruenze dovuta alla deriva

31
M. De Cecco - Sensor Fusion: teoria ed applicazione alla percezione di sistemi robotici Mappa da encoder Mappa da fusione Esempio di mappatura con forte deriva

Presentazioni simili






 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")



 A.A. 99/00 B. Modulo di Robotica>")








 connessi in cascata tramite coppie cinematiche (giunti) a formare una catena cinematica.>")