INGRESSI E USCITE
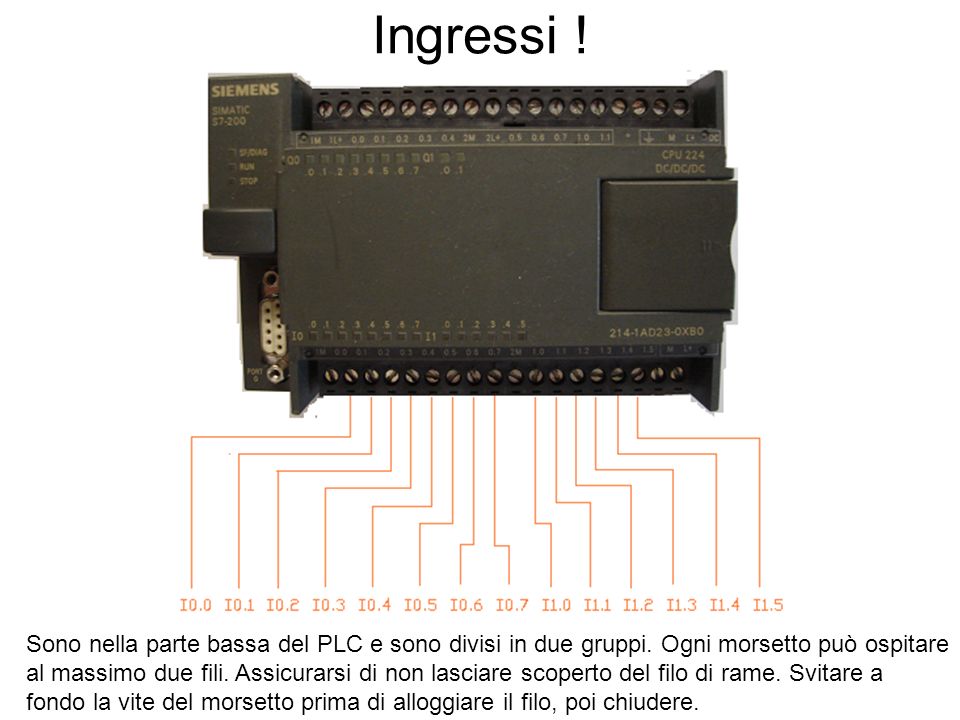
Ingressi ! Sono nella parte bassa del PLC e sono divisi in due gruppi. Ogni morsetto può ospitare al massimo due fili. Assicurarsi di non lasciare scoperto del filo di rame. Svitare a fondo la vite del morsetto prima di alloggiare il filo, poi chiudere.
Schema elettrico degli ingressi ! Internamente al PLC, ogni ingresso è optoisolato. La polarità del circuito d’ingresso è indifferente (non in tutti i modelli di PLC). Possono essere di tipo NPN cioè con il comune degli ingressi (1M) positivo, mentre sono PNP se il comune è negativo.
Cos’è l’optoisolatore ? L’optoisolatore serve per isolare elettricamente la delicata circuiteria elettronica del PLC dall’impianto di comando (che normalmente funziona a 24V). E’ fatto con un led che eccita un fototransistor, quindi l’isolamento è di tipo ottico. Essendo un componente elettronico è piuttosto delicato e non sostituibile. E’ abbastanza sensibile ai disturbi elettrici. Quindi è consigliabile effettuare collegamenti corti e lontano dai cavi di alimentazione e del circuito d’uscita (che comanda i carichi).
Il comune degli ingressi ! Normalmente i PLC hanno un comune per gli ingressi (questo modello un comune per gli ingressi da I0.0 a I0.7 ed uno per gli ingressi da I1.0 a I1.5). L’alimentazione degli ingressi deve essere tra 21V e 28V in corrente continua, può provenire da una sorgente esterna oppure si possono usare gli appositi terminali M e L+ (alimentazione per sensori).
Il nostro circuito d’ingresso ! Il circuito d’ingresso è alimentato dallo stesso PLC, tramite i terminali di servizio a 24V in corrente continua (max 1.5A). Infatti è importante sfruttare questa soluzione, in quanto garantisce una corretta tempistica di alimentazione (prima della lettura degli ingressi) e protezione da disturbi.
L’impianto di comando ! Prestare attenzione al collegamento comune dell’impianto di comando. Nel nostro caso con i 24V dello stesso PLC. Plancia del PLC Morsettiera Fare collegamenti corti e lontani da quelli di alimentazione e delle uscite
Importante ! Non superare i 28 V per comandare gli ingressi Segnale d’ingresso riconosciuto attivo se > 15.0V, non attivo se < 5.0 V. Evitare disturbi elettrici (fili corti, schermati, lontano da altri cavi, ecc.) Non sovraccaricare o cortocircuitare l’alimentazione 24V del PLC usata per alimentare gli ingressi (max 1.5A). Alimentare l’impianto di comando (collegato agli ingressi) prima del PLC stesso (oppure sfruttare la sua alimentazione 24V) per evitare false attivazioni.
Uscite ! Sono nella parte alta del PLC e sono divisi in gruppi (di solito multipli di due). Ogni morsetto può ospitare al massimo due fili. Assicurarsi di non lasciare scoperto del filo di rame. Svitare a fondo la vite del morsetto prima di alloggiare il filo, poi chiudere.
Schema elettrico delle uscite ! Le uscite nei PLC sono a transistor o a relè. Le uscite a transistor possono essere NPN cioè ricevono corrente (comune negativo) oppure PNP cioè emettono corrente (comune positivo). Non sono protette (quindi attenzione a scintillamenti per forti carichi o frequenti commutazioni) e non sono sostituibili. Possono sopportare al massimo 0.75A (24v) ognuna e hanno tempi di commutazioni di circa 10µsec (per quelle a relè 2A a 250v con tempi dell’ordine dei 10 msec).
Il comune delle uscite ! In questo PLC le alimentazioni delle uscite sono divise in due gruppi. L’alimentazione delle uscite deve essere distinta da quella degli ingressi. Con i relè può essere anche in corrente alternata.
Il nostro circuito d’uscita ! Le alimentazioni delle uscite sono state “ponticellate” assieme e portati alla alimentazione del PLC medesimo. Usare preferibilmente la 24V = e non superare i carichi max (0.75A).
Impianto dei carichi ! Alimentare i carichi elevati (motori,ecc.) separatamente, interfacciando le uscite con relè. Usare una alimentazione separata per le uscite (24V ~) collegando il neutro al comune dei relè d’interfaccia e la fase ai vari apparecchi. Evitare frequenti commutazioni, sovraccarichi e di collegare direttamente carichi fortemente induttivi (motori) Plancia del PLC
Importante ! Riconoscere le uscite se a relè o a transistor, in quanto cambia l’alimentazione del comune (negativa per NPN, positiva per PNP, indifferente per i relè). Alimentare separatamente l’impianto dei carichi (uscite) da quello di comando (ingressi). Non superare i limiti delle uscite (quelle a transistor 0.75A, quelle a relè 2A ). Ricordarsi dei lunghi tempi di commutazione (>10 msec) dei relè, quindi per controlli di potenza (PWM, Inverter) e posizionamenti (PTO. Step motor) usare uscite a transistor. Evitare frequenti commutazioni e scintillamenti dovuti a carichi elevati (per le uscite a relè, mentre per quelle a transistor è indifferente). Interfacciare le uscite con relè (se possibile) anche nel caso di PLC con uscite a relè, perchè non sono protetti e non sostituibili.
Layout degli ingressi e delle uscite! Rappresentazione schematica degli ingressi (in basso) e delle uscite (in alto). I terminali di alimentazione del PLC sono normalmente a 24V=, in alcuni casi a 220V~ I terminali di alimentazione di servizio (24V=) servono per espansioni, pannelli di comando, altri dispositivi e/o per l’impianto di comando collegato agli ingressi (sensori, pulsanti, fine corsa).
Tenere conto ! Del ciclo di scansione del PLC (cioè del fatto che prima legge gli ingressi, poi processa le istruzioni del programma, poi esegue un procedura di comunicazione e di autodiagnosi e solamente alla fine aggiorna le uscite. Durata tra 10 msec e 100 msec). Che impulsi in ingresso più brevi del ciclo di scansione verrebbero normalmente ignorati (se necessario usare le opportune funzioni). Che le uscite sono comandate simultaneamente e dopo la lettura del programma (attenzione alle uscite ripetute, cioè la stessa uscita utilizzata più volte nel programma, perché conterebbe solo l’ultimo stato di attivazione). Che ogni volta che si alimenta il PLC lui aggiorna la memoria EEPROM (che ha vita media di 100000 cicli). Quindi evitare frequenti accensioni e se necessario fermare l’impianto, non spegnere il PLC ma metterlo in STOP.
Riassumendo !
L’ indirizzamento ! L’ identificatore per l’area di memoria degli ingressi è la lettera “I”. Ogni singola uscita (detta canale) viene individuata con un preciso indirizzo, composto da una cifra, un punto e una seconda cifra (compresa tra 0 e 7). La prima cifra indica il byte (cioè una serie di 8 ingressi), la seconda il bit (cioè nella serie di 8 quale in specifico tra la prima la 0 e l’ultima la 7).
Esempio ! Il primo ingresso, corrispondente al primo morsetto del gruppo degli ingressi è “ I 0.0 “. Poiché costituito dal byte 0, bit 0. Il secondo ingresso sarà “ I 0.1 “, il terzo “ I 0.2”, cosi via, fino all’ottavo “ I 0.7”. Da qui si ricomincia con il byte successivo, cioè “ I 1.0”, “ I 1.2” , ecc.. Questo indirizzamento vale anche per le uscite, dove però il simbolo è la “Q”.
Attenzione ! Quando sono presenti delle espansioni, l’ indirizzamento ricomincia sempre dal byte successivo ad ogni modulo collegato.
Concludendo ! Gli ingressi sono indicati con la lettera “ I “ (registro d’immagine degli ingressi) e le uscite con la lettera “ Q “ (registro d’immagine delle uscite). Vengono individuati con un indirizzamento conforme alle direttive IEC 61131-6, cioè : lettera dell’area di memoria ( es: “I” per gli ingressi, “Q” per le uscite) seguito dal numero del byte, poi un punto e infine il numero del bit corrispondente nel byte.