Scheduling in Linux (Kernel 2.6)
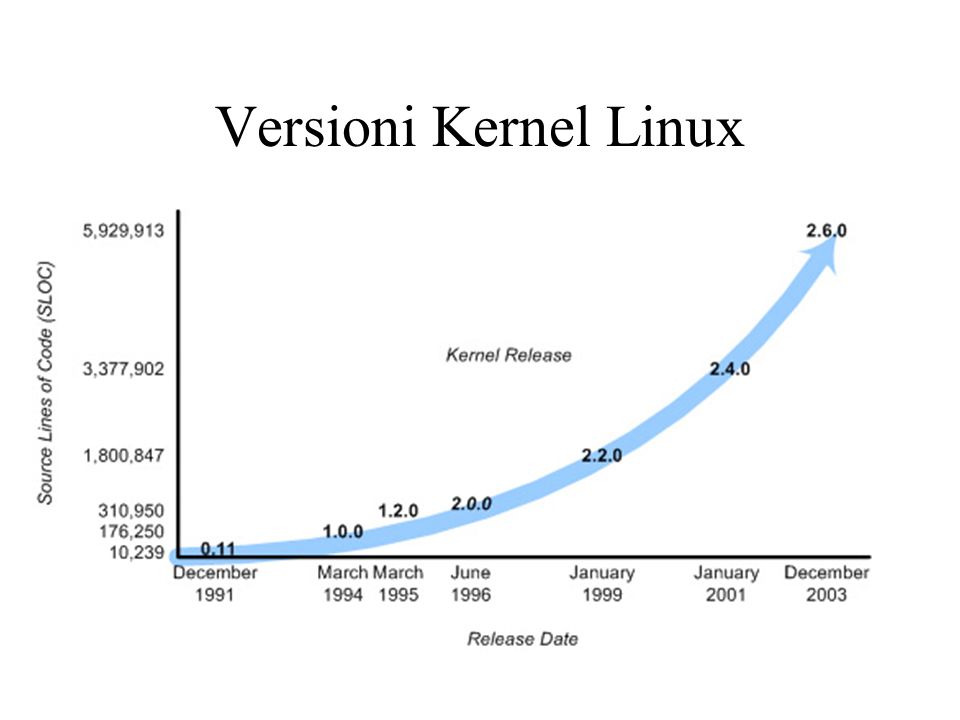
Versioni Kernel Linux
Scheduling Kernel < 2.6 Nelle versioni del kernel precedenti alla 2.6, lo scheduler aveva complessita’ O(n) dove n e’ il numero di task in competizione per la CPU Per n grande scheduler inefficiente Nei sistemi MPU, una sola runqueue per tutti i processori: una task poteva quindi essere eseguito in ogni processore: ok per load balancing, ma non per gestione delle cache dei singoli processori un solo lock sulla runqueue: durante la scelta del processo da parte di un processore, gli altri processori rimanevano idle
Scheduling Kernel < 2.6 Infine nello scheduler pre-2.6 non veniva applicata la preemption Un processo a priorita’ bassa poteva girare (fino alla scadenza del suo quanto di tempo) lasciando in attesa processi a priorita’ piu’ alta
Kernel 2.6 Il kernel Linux utilizza usa i thread come unita’ di esecuzione ed implementa un nuovo algoritmo di scheduling rispetto alle versioni precedenti Lo scheduler e’ chiamato ``O(1) scheduler’’ (scritto da I. Molnar) A differenza dello scheduler ``O(n)’’ nelle versioni precedenti infatti opera in tempo costante O(1) indipendentemente dal numero di thread in competizione per la CPU. Motivazione: supportare al meglio il multithreading nella Java Virtual Machine Inoltre supporta in modo piu naturale sistemi multiprocessore
Scheduler Kernel 2.6 Ogni CPU ha una runqueue chiamata active runqueu con 140 code di priorita` (liste) gestite FIFO Prime 100 priorita’: real time task Ultime 40: user tarsk Ogni task ha a disposizione un quanto di tempo (round robin su ogni coda di priorita’) Inoltre ogni CPU ha una expired runqueue con la stessa struttura della active runqueue Quando un processo termina il suo time-slice viene rucalcolata la priorita’ e il processo viene aggiunto in coda alla lista della nuova priorita’ nella expired runqueue Se non ci sono task da eseguire per una certa priorita’ nella active runqueue Si scambiano active ed expired (expired diventa la nuova active runqueue)
Scheduler Il compito dello scheduler e’ quindi quello di eseguire il task nella lista non vuota con maggiore priorita’ Ad ogni priorita’ viene associata una bitmask. Si possono utilizzare operazioni tipo bit-a-bit per rendere l’operazione dipendente dal numero di priorita’ (bit) invece che dal numero di processi Questa proprieta’ rende lo scheduler 2.6 un programma con complessita’ O(1).
Active ed expired runqueue
Altre caratteristiche Lo scheduler 2.6 permette la preemption dei task a minor priorita’ Il calcolo dinamico delle priorita’ (in base all’uso della CPU e di operazioni di I/O) evita starvation Ogni runqueue ha un lock separato lock per sfruttare al meglio un sistema multiprocessore (lo scheduler su una CPU non blocca lo scheduler sulle altre) Inoltre utilizza tecniche di load balancing (es. ogni 200ms controlla il carico e se necessario sposta processi dalla runqueue di un processore ad un’altra)