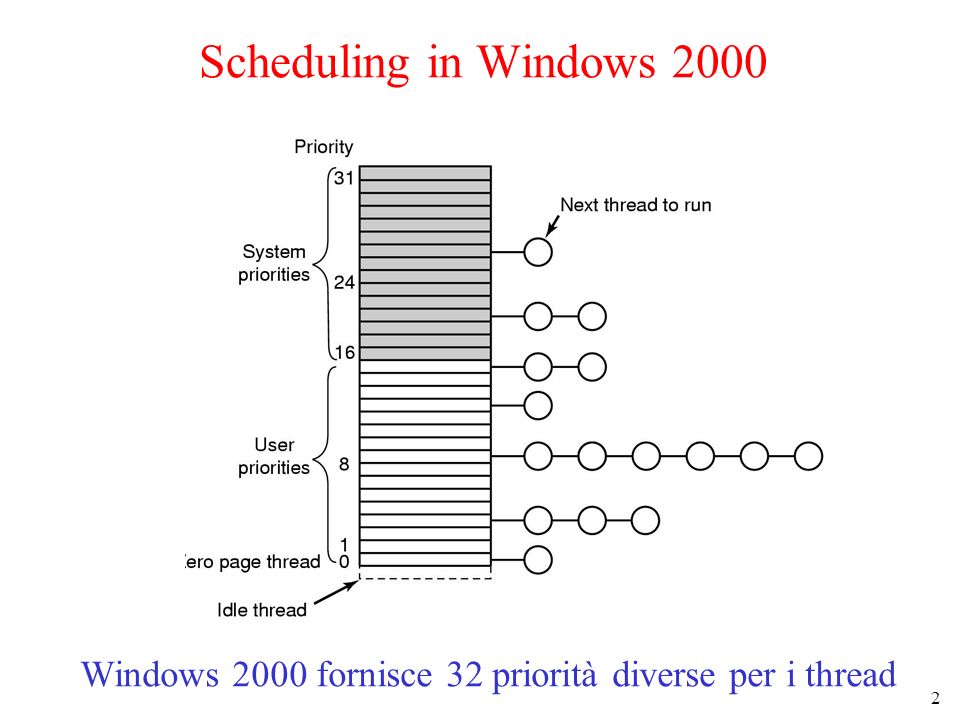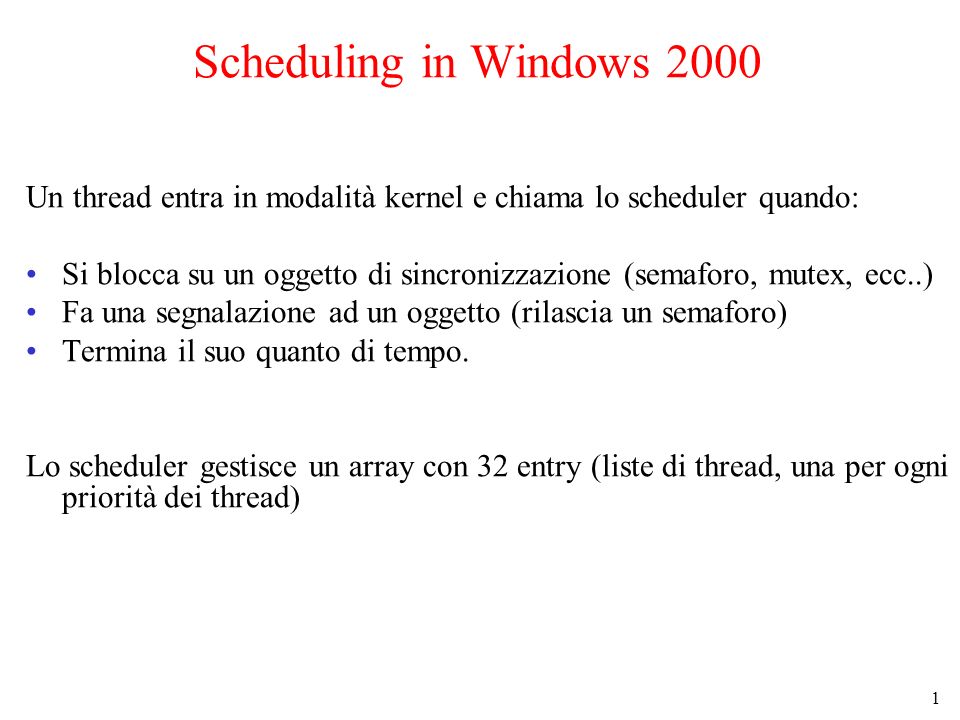
1 Scheduling in Windows 2000 Un thread entra in modalità kernel e chiama lo scheduler quando: Si blocca su un oggetto di sincronizzazione (semaforo, mutex, ecc..) Fa una segnalazione ad un oggetto (rilascia un semaforo) Termina il suo quanto di tempo. Lo scheduler gestisce un array con 32 entry (liste di thread, una per ogni priorità dei thread)
2 Scheduling in Windows 2000 Windows 2000 fornisce 32 priorità diverse per i thread
3 Scheduling in Windows 2000 Win32 permette allutente di specificare : –priorità di un processo (6 livelli diversi) –priorità di un thread allinterno di un processo (7 livelli diversi) Attraverso le API SetPriorityClass e SetThreadPriority Windows 2000 mappa le 42 combinazioni possibili su 32 livelli di priorità
4 Scheduling in Windows 2000 Corrispondenza fra le priorità di Win32 e quelle di Windows 2000
5 Scheduling in Windows 2000 Algoritmo di scheduling : Si esegue il primo thread della prima coda non vuota per massimo 1 quanto (20ms--120ms) Scheduling round robin fra thread con la stessa priorità Come variano le priorità nel tempo : –i thread tipicamente entrano a priorità 8 –la priorità viene elevata se: viene completata una operazione di I/O (+1 disco, +2 linea seriale, +6 tastiera, +8 scheda audio …) termina lattesa su un semaforo, mutex linput nella finestra di dialogo associata al thread è pronto
6 Scheduling in Windows 2000 Algoritmo di scheduling : Come variano le priorità nel tempo –la priorità viene abbassata se: un thread usa tutto il suo quanto (-1) –se un thread non ha girato per un tempo maggiore di una soglia fissata, allora passa per 2 quanti a priorità 15 (serve a gestire potenziali inversioni di priorità)
7 Lo scheduler di Linux Vengono schedulati i thread, non i processi Tre classi di thread : real-time FIFO, real-time Round Robin, Timesharing Ogni thread ha –una priorità nellintervallo [0, +40], generalmente allinizio la priorità di default è 20 (può essere variata con la system call nice(valore) : nuova_priorità = 20 – valore) –un quanto (misurato in jiffy o tick = 10ms) Lo scheduler calcola la goodness (gdn) di ogni thread come if (class == real-time) gdn = priority if (class == timeshar && quantum > 0) gdn = quantum + priority if (class == timeshar && quantum == 0) gdn = 0
8 Lo scheduler di Linux Algoritmo di scheduling : Ogni volta viene selezionato il thread con goodness maggiore Ogni volta che arriva un tick (segnale del clock) il quanto del processo in esecuzione viene decrementato Un thread viene de-schedulato se si verifica una delle seguenti condizioni –il quanto diventa 0 –il thread si blocca su semafori, mutex, ecc.. –diventa ready un thread con una goodness maggiore
9 Lo scheduler di Linux Algoritmo di scheduling: Quando tutti i quanti dei processi ready sono andati a 0, lo scheduler ricalcola il quanto di ogni processo (anche se blocked) come segue : quantum = quantum / 2 + priority Perche i processi bloccati avranno del quantum rimanente.
10 LINUX: struttura generale The layers of a UNIX system. User Interface
11 Processi in LINUX Ogni processo nasce con un solo thread Un processo gira in modalità utente; quando effettua una system call passa in modalità kernel e può operare sulle risorse del sistema. Il kernel possiede due strutture per ogni processo: –process table e user structure
12 Gestione dei Processi Process table : risiede sempre in RAM Contiene: parametri per lo scheduling (priorità, tempo consumato, ecc.) immagine di memoria (punatori alle aree di memoria e al disco). informazioni sui segnali (quali segnali gestire, ignorare, ecc.) Stato del processo PID, PID del padre user e group id.
13 Gestione dei Processi User structure risiede su disco se il processo è swapped Contiene informazioni non necessarie quando il processo non è in esecuzione: –Registri macchina –tabella dei descrittori di file aperti –stato della system call corrente (parametri) –kernel stack –informazioni di accounting (tempo CPU, limiti, ecc.)
14 Creazione di Processi int pid = fork() –crea una copia esatta del processo invocante –restituisce 0 al figlio ed il PID del figlio al padre –duplica i dati e lo stack del padre nel figlio in unarea di memoria differente –i file aperti dal padre sono condivisi al figlio –Il figlio eseguirà lo stesso codice del padre
15 Creazione di Processi execl (nome_con_path, nome, argv) –Fa eseguire a un processo un codice diverso, con diversi parametri –Nome_con_path = nome delleseguibile compreso di path –nome = nome delleseguibile –Argv = lista di parametri deleseguibile separati da virgola, terminati da NULL Esempio di processo che lancia ls -l execv (/bin/ls, ls, -l, NULL); Esistono altre chiamate con differenti argomenti: execv, execve, execle, ecc..
16 Terminazione di processi wait(&status) –attende la terminazione di un processo figlio –dopo lesecuzione di wait, status contiene lesito della computazione del processo figlio (il codice di uscita del figlio e altre informazioni) exit(status) –termina il processo e restituisce il valore di status al padre (nella variabile status restituita da wait)
17 Terminazione di processi Processi zombie –processi terminati il cui padre non ha (ancora) eseguito la wait() –attendono di restituire il codice di terminazione e svanire, altrimenti rimangono zombie e sono eliminati da uno speciale processo detto init
18 Comunicazione fra processi Pipe : file speciali utilizzati per connettere due processi con un canale unidirezionale di comunicazione Se B cerca di leggere da una pipe vuota si blocca Se A scrive su una pipe piena, viene bloccato fino a che non viene letto qualcosa Lampiezza della pipe dipende dal sistema
19 Comunicazione fra processi Una pipe si crea con listruzione: int pd[2]; pipe(pd); Si legge da pd[0] e si scrive su pd[1] Per leggere: read (pd[0], buffer, lung); Per scrivere: write (pd[1], buffer, lung); Dove buffer è unarray di caratteri e lung è la lunghezza del messaggio.
20 Comunicazione fra processi Segnali (interruzioni software) –comunicano al processo il verificarsi di una certo evento –possono essere inviati solo ai membri del proprio gruppo (antenati, discendenti) –generalmente possono essere ignorati, catturati o possono terminare il processo (default per molti segnali) –per i segnali catturabili si può specificare un signal handler che viene mandato in esecuzione appena il segnale viene rilevato
21 Comunicazione fra processi Segnali (cont.) –particolari combinazioni di tasti inviano dei segnali al processo in foregroud Control-C corrisponde a SIGINT Control-Z corresponde a SIGTSTP –i segnali servono anche al SO per a comunicare al processo il verificarsi di particolari eventi (es. SIGFPE, errore floating-point)
22 I segnali previsti da POSIX
23 Chiamate di sistema relative ai processi s è un codice di errore pid è il codice di identificazione di un processo