Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
(NAVigation Satellite Timing And Ranging Global Positioning System)
Il sistema NAVSTAR GPS (NAVigation Satellite Timing And Ranging Global Positioning System) sistema basato sulla ricezione a terra di segnali elettromagnetici emessi da una costellazione di sat artificiali, gestiti dal DOD (Department of Defence) degli USA, che offre servizi (di usi civili e militari) per la navigazione, la misura del tempo, la misura delle distanze ed il posizionamento globale. Il sistema è stato progettato in maniera da permettere la fruizione dei servizi offerti in ogni istante e in ogni luogo del nostro pianeta. 2
 sistema basato sulla ricezione a terra di segnali elettromagnetici emessi da una costellazione di sat artificiali, gestiti dal DOD (Department of Defence) degli USA, che offre servizi (di usi civili e militari) per la navigazione, la misura del tempo, la misura delle distanze ed il posizionamento globale. Il sistema è stato progettato in maniera da permettere la fruizione dei servizi offerti in ogni istante e in ogni luogo del nostro pianeta. 2.")
2
Indice - Sezione 1 Tradizionalmente
Caratteristiche generali del GPS Componenti del sistema Misura della distanza Misura della posizione Struttura del segnale GPS Determinazione della distanza dalle osservazioni di codice Determinazione della distanza dalle osservazioni di fase Disponibilità selettiva Sorgenti d’errore GPS Differenziale Ambiguità iniziale di fase La risoluzione delle ambiguità Deprezzamento della precisione 1-2 3

3
Tradizionalmente: Il GPS offre molti vantaggi rispetto alle tradizionali tecniche di rilievo Le tecniche tradizionali si basano tutte sulla visibilità tra strumento e prisma Qualora ci siano ostacoli, vanno aggirati La misura della distanza media è intorno ai 5 km Le condizioni atmosferiche possono limitare le operazioni (es.. nebbia, pioggia,...) 1-3 4
")
4
Caratteristiche del GPS
Indipendenza dalle condizioni atmosferiche Non richiede la visibilità tra i punti nei rilievi topografici È in grado di fornire un’elevata accuratezza E’ operativo giorno e notte in qualsiasi parte del mondo Veloce e richiede meno manutenzione Vantaggi economici Sistema di coordinate universale Ampie possibilità di applicazioni 5

5
Svantaggi del GPS: Il cielo della stazione deve essere libero
da ostacoli fisici

6
Svantaggi del GPS: Non devono esserci campi magnetici

7
Caratteristiche generali del GPS
Sviluppato dal Ministero della Difesa degli Stati Uniti (DoD) Fornisce: Accuratezza nella navigazione m Copertura mondiale Accesso 24 ore su 24 Sistema di coordinate universale Progettato per sostituire i sistemi di navigazione esistenti Accessibile a Civili e Militari 1-5 6
 Fornisce: Accuratezza nella navigazione m. Copertura mondiale. Accesso 24 ore su 24. Sistema di coordinate universale. Progettato per sostituire. i sistemi di navigazione esistenti. Accessibile a Civili e Militari")
8
Componenti del Sistema GPS Segmento Spaziale Segmento di controllo
NAVSTAR : NAVigation Satellite Time and Ranging 24 Satelliti 20200 Km Segmento Utenti Ricevono il segnale Segmento di controllo 1 Stazione Master 5 Stazioni di Monitoraggio ` 1-6 7

9
Segmento di Controllo La Stazione Master: 5 Stazioni di monitoraggio:
Colleziona i dati di tracciamento delle stazioni di monitoraggio Aggiorna le predizioni delle orbite dei satelliti (effemeride predette) e calcola a posteriori l’effettiva orbita compiuta da ciascun satellite (effemeride precise) Distribuisce i risultati dei calcoli alle stazioni di monitoraggio Aggiorna gli orologi dei satelliti con il Master Clock (MC) ubicato all’USNO (U.S. Naval Observatory) 5 Stazioni di monitoraggio: Sono su posizioni note con estrema precisione Misurano costantemente la distanza tra loro ed i satelliti Inviano ai satelliti i dati calcolati dalla Stazione Master Fanno eseguire ai satelliti piccole manovre di correzione delle rotte 1-7 35
 e calcola a posteriori l’effettiva orbita compiuta da ciascun satellite (effemeride precise) Distribuisce i risultati dei calcoli alle stazioni di monitoraggio. Aggiorna gli orologi dei satelliti con il Master Clock (MC) ubicato all’USNO (U.S. Naval Observatory) 5 Stazioni di monitoraggio: Sono su posizioni note con estrema precisione. Misurano costantemente la distanza tra loro ed i satelliti. Inviano ai satelliti i dati calcolati dalla Stazione Master. Fanno eseguire ai satelliti piccole manovre di correzione delle rotte")
10
Segmento Spaziale: Almeno 24 Satelliti
4 satelliti in 6 orbite piane inclinate di 55 gradi sessagesimali 20200 Km sulla superficie terrestre Orbite in 11 ore 58 secondi In vista ogni ore Durata dei satelliti 7.5 anni Tipi differenti Blocco I, II, II A, II R & II F 55 Equatore 1-8 36

11
Costruzione di un satellite
Segmento Spaziale: Costruzione di un satellite 2

12
Un satellite del blocco II R
Segmento Spaziale: Un satellite del blocco II R

13
Struttura del segnale GPS
Ciascun satellite GPS trasmette un segnale complesso Il segnale comprende 2 fasi portanti (L1 ed L2), 2 codici (C/A su L1 e P (Y) sia su L1 che su L2) ed un messaggio di navigazione Frequenza fondamentale MHz x 154 x 120 L MHz L MHz Codice C/A MHz Codice P (Y) MHz ÷ 10 50 BPS Messaggio di Navigazione (Effemeridi, almanacco, ) 1-20 17
, 2 codici (C/A su L1 e P (Y) sia su L1 che su L2) ed un messaggio di navigazione. Frequenza. fondamentale MHz. x 154. x 120. L MHz. L MHz. Codice C/A MHz. Codice P (Y) MHz. ÷ BPS. Messaggio di Navigazione. (Effemeridi, almanacco, )")
14
Modulazione del segnale GPS
I codici sono delle onde quadre formate da transizioni di valori binari (BIT) che modulano in fase le portanti L1e L2 (ogni transizione di BIT provoca uno sfasamento ; modulazione BPSK). L1 ha 2 componenti in quadratura di fase, una con il codice P e la seconda ritardata di 90° con il codice C/A; L2, invece, è modulata solo dal codice P. Modulazione di FASE Amplitude modulation of a data signal onto a carrier signal Frequency modulation of a data signal onto a carrier signal
 che modulano in fase le portanti L1e L2 (ogni transizione di BIT provoca uno sfasamento ; modulazione BPSK). L1 ha 2 componenti in quadratura di fase, una con il codice P e la seconda ritardata di 90° con il codice C/A; L2, invece, è modulata solo dal codice P. Modulazione di FASE. Amplitude modulation of a data signal onto a carrier signal. Frequency modulation of a data signal onto a carrier signal.")
15
Segmento utenti : i ricevitori
Sono strumenti di tipo passivo (ovvero non emettono ma captano i segnali) costituiti da un’antenna con preamplificatore, una sezione radiofrequenza che contiene il segnale elaborato elettronicamente in una combinazione di circuiti analogici e digitali, un microprocessore, un sistema di registrazione dati e un sistema di alimentazione. Le antenne GPS non necessitano di puntamento nella direzione della sorgente e la determinazione del centro di fase è predeterminata in modo non puntuale (non si tratta di un punto matematico ma di una superficie). 1-9 37
 costituiti da un’antenna con preamplificatore, una sezione radiofrequenza che contiene il segnale elaborato elettronicamente in una combinazione di circuiti analogici e digitali, un microprocessore, un sistema di registrazione dati e un sistema di alimentazione. Le antenne GPS non necessitano di puntamento nella direzione della sorgente e la determinazione del centro di fase è predeterminata in modo non puntuale (non si tratta di un punto matematico ma di una superficie)")
16
Principio di misura della posizione
2

17
Questo problema è simile all’intersezione inversa
Principio di misura della posizione Questo problema è simile all’intersezione inversa 1-19 16

18
Principio di misura della posizione
I satelliti sono punti trigonometrici nello spazio Le distanze a ciascun satellite vengono misurate usando i codici o le fasi I ricevitori GPS usano orologi economici che sono meno precisi di quelli a bordo dei satelliti Le onde radio viaggiano alla velocità della luce: (Distanza = Velocità della luce x Tempo impiegato) Considerando un errore dell’orologio del ricevitore di: 1/10 di secondo l’errore nella distanza sarà di Km 1/ di secondo l’errore nella distanza sarà di 300 m 15
 Considerando un errore dell’orologio del ricevitore di: 1/10 di secondo l’errore nella distanza sarà di Km. 1/ di secondo l’errore nella distanza sarà di 300 m. 15.")
19
Stato dei satelliti Denver 39 40’N 104 51’W 1787m Time : GMT -07.00
Date : 10/08/97 Window : Cut Off Angle Almanac from : 09/27/97 37

20
La misura della distanza con l’uso del codice
2

21
Determinazione della pseudodistanza con l’uso del codice
Pseudodistanze (Codice) Ciascun satellite manda un segnale che si ripete ogni millisecondo Il ricevitore confronta il segnale ricevuto con quello generato internamente Da questa correlazione si determina la differenza di tempo (dT) e quindi la pseudodistanza L’orologio del ricevitore dev’essere sincronizzato con quello del satellite Codice ricevuto dal satellite Codice generato dal ricevitore T D = V (T) 18
 Ciascun satellite manda un segnale che si ripete ogni millisecondo. Il ricevitore confronta il segnale ricevuto con quello generato internamente. Da questa correlazione si determina la differenza di tempo (dT) e quindi la pseudodistanza. L’orologio del ricevitore dev’essere sincronizzato con quello del satellite. Codice ricevuto. dal satellite. Codice. generato. dal ricevitore. T. D = V (T) 18.")
22
Principio di misura della pseudodistanza
Xll Vl Xl lll l ll lV V Vll Vlll X lX Immaginiamo che il satellite del quale dobbiamo misurare la distanza, disti da noi ,5 Km. 8

23
Per coprire questa distanza il segnale impiega:
Principio di misura della pseudodistanza Xll Vl Xl lll l ll lV V Vll Vlll X lX Per coprire questa distanza il segnale impiega: 24.001,25 Km / Km/s = 0, s 9

24
Principio di misura della pseudodistanza
Xll Vl Xl lll l ll lV V Vll Vlll X lX Se il ricevitore contenesse un cronometro ad altissima precisione sincronizzato con l’orologio atomico del satellite: 0, s x Km/s = ,25 Km 10

25
Principio della misura della pseudodistanza
Xll Vl Xl lll l ll lV V Vll Vlll X lX Distanza = Velocità x Tempo 11

26
Principio di misura della posizione
Con la misura di una sola distanza la posizione è su una sfera di raggio R1 12

27
Principio di misura della posizione
Con la misura di due distanze la posizione è sul cerchio generato dall’intersezione delle due sfere 13

28
Principio di misura della posizione
3 Sfere si intersecano in un punto. Con 3 distanze si possono calcolare: Latitudine, Longitudine e Quota 14

32
La misura di pseudo range
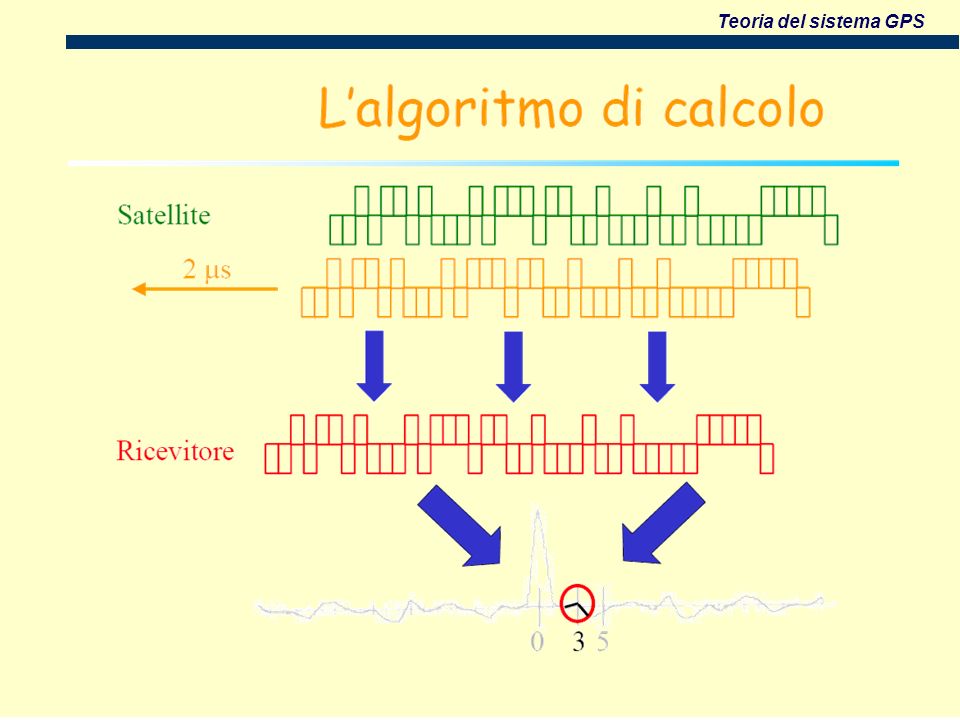
La misura di pseudo-range è una misura di distanza (range) affetta dagli errori degli orologi. La misura di pseudo-range è lo spostamento (shift) di tempo necessario per allineare una replica del codice generata nel ricevitore con quello ricevuto dal satellite moltiplicato per la velocità c della luce. Idealmente detto shift rappresenta la differenza tra il tempo di ricezione del segnale (misurato nel riferimento temporale del ricevitore) e quello di emissione (misurato nel riferimento temporale del satellite). Poiché i due riferimenti di tempo sono differenti, s’introduce un errore sistematico nelle misure dei ritardi di tempo che saranno per questo motivo, riferiti a pseudo-range. Si può allora affermare che la misura di pseudo-range è dunque il ritardo che deve essere aggiunto alle epoche nell’orologio del ricevitore per mantenere allineati (correlati) la replica del codice generato e quello ricevuto. Il ricevitore effettua una operazione di matching (centratura del segnale) tra il segnale GPS ricevuto e quello generato dal suo software. Questa operazione è espressa dalla seguente relazione: dove S(t) è il segnale ricevuto, S(t +t ) il segnale generato dal ricevitore e T il periodo scelto. La funzione di auto correlazione assume il valore unitario quando c’è una perfetta sovrapposizione fra i due segnali ed avviene l’agganciamento (lock on) dei due segnali con t intervallo di correlazione.
 affetta dagli errori degli orologi. La misura di pseudo-range è lo spostamento (shift) di tempo necessario per allineare una replica del codice generata nel ricevitore con quello ricevuto dal satellite moltiplicato per la velocità c della luce. Idealmente detto shift rappresenta la differenza tra il tempo di ricezione del segnale (misurato nel riferimento temporale del ricevitore) e quello di emissione (misurato nel riferimento temporale del satellite). Poiché i due riferimenti di tempo sono differenti, s’introduce un errore sistematico nelle misure dei ritardi di tempo che saranno per questo motivo, riferiti a pseudo-range. Si può allora affermare che la misura di pseudo-range è dunque il ritardo che deve essere aggiunto alle epoche nell’orologio del ricevitore per mantenere allineati (correlati) la replica del codice generato e quello ricevuto. Il ricevitore effettua una operazione di matching (centratura del segnale) tra il segnale GPS ricevuto e quello generato dal suo software. Questa operazione è espressa dalla seguente relazione: dove S(t) è il segnale ricevuto, S(t +t ) il segnale generato dal ricevitore e T il periodo scelto. La funzione di auto correlazione assume il valore unitario quando c’è una perfetta sovrapposizione fra i due segnali ed avviene l’agganciamento (lock on) dei due segnali con t intervallo di correlazione.")
33
Questo processo matematico fra i due segnali è illustrato nella seguente figura:
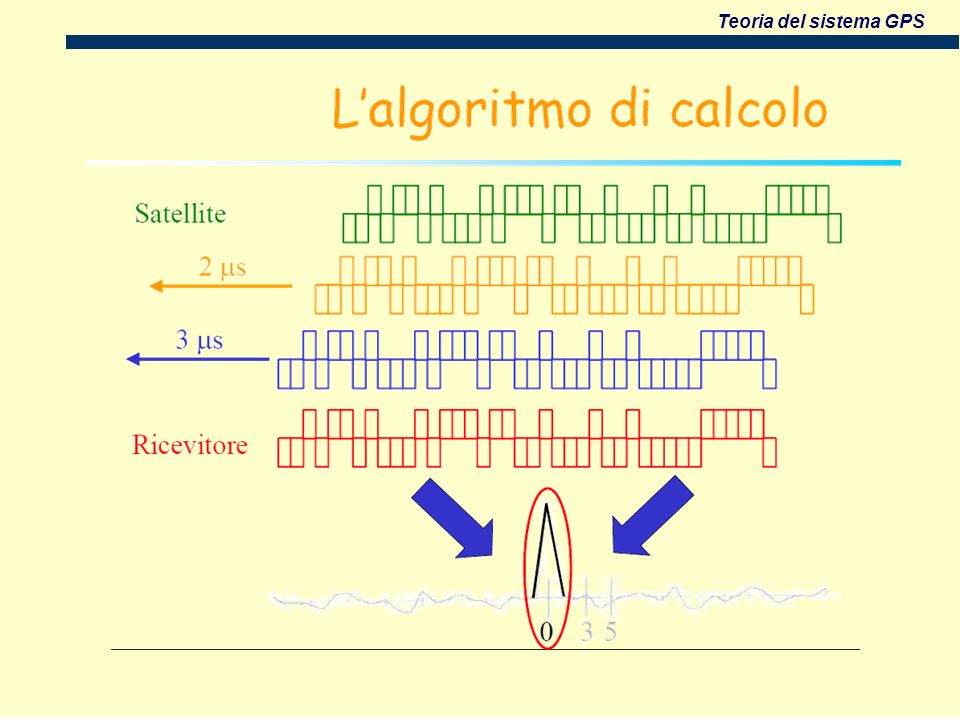
In questo caso, (t = 0), non avviene l’aggancio (lock on) dei due segnali ed il ricevitore non riceve il satellite; l’aggancio della sequenza dei due segnali avviene per t = 3 , come si può facilmente vedere nella figura:
, non avviene l’aggancio (lock on) dei due segnali ed il ricevitore non riceve il satellite; l’aggancio della sequenza dei due segnali avviene per t = 3 , come si può facilmente vedere nella figura:")
34
L’intervallo di auto correlazione rappresenta il tempo necessario al segnale GPS per raggiungere il ricevitore (tempo di propagazione); da detto intervallo si calcola la distanza fra satellite e ricevitore: pseudorang e = c × t × lunghezza chip Rimane il problema di scegliere T. T è scelto uguale al periodo della forma d’onda (per il codice C/A è un millisecondo) per il quale la funzione di auto correlazione è vera; per altri valori la funzione è falsa. Il codice C/A, come già detto, si ripete ogni millisecondo, perciò la misura di pseudorange avrà un’ambiguità di 300 km. Questo problema è risolto dando al ricevitore la posizione stimata. Dato che l’ambiguità è molto grande, l’accuratezza della posizione stimata è ovviamente molto bassa; di solito quest’ambiguità non esiste ma l’esperienza degli autori consiglia, quando si usa per la prima volta il ricevitore, di inserire nel ricevitore la posizione stimata. Per il codice P non è possibile usare la stessa tecnica perché, come già detto, il segnale si ripete ogni settimana. Il ricevitore utilizza la procedura di “lock on” del codice C/A per decodificare il messaggio di navigazione e usa la parola “handover” di sincronizzazione, contenuta nel messaggio, per passare dalla misura di pseudorange del codice C/A a quella del codice P. Il ricevitore GPS utilizza questo tipo di misura per eseguire il posizionamento in tempo reale. L’osservazione simultanea di quattro satelliti consentirà di determinare la posizione tridimensionale del ricevitore e l’errore dell’orologio, ad una data epoca. La precisione con la quale può essere mantenuto il picco di correlazione (e quindi la precisione con la quale può essere fatta una misura di pseudo-range) secondo una regola pratica viene stimata essere l’1% del periodo tra le epoche di due codici successivi. Per il codice P due epoche successive sono separate da 0.1mS , pertanto la precisione nella misura sarà di un nanosecondo (10-9) e conseguentemente una precisione nella misura della distanza di 30 cm. Per il codice C/A le precisioni sono inferiori esattamente di un decimo, pertanto la precisione nella misura delle distanze è di 3 m.
 per il quale la funzione di auto correlazione è vera; per altri valori la funzione è falsa. Il codice C/A, come già detto, si ripete ogni millisecondo, perciò la misura di pseudorange avrà un’ambiguità di 300 km. Questo problema è risolto dando al ricevitore la posizione stimata. Dato che l’ambiguità è molto grande, l’accuratezza della posizione stimata è ovviamente molto bassa; di solito quest’ambiguità non esiste ma l’esperienza degli autori consiglia, quando si usa per la prima volta il ricevitore, di inserire nel ricevitore la posizione stimata. Per il codice P non è possibile usare la stessa tecnica perché, come già detto, il segnale si ripete ogni settimana. Il ricevitore utilizza la procedura di lock on del codice C/A per decodificare il messaggio di navigazione e usa la parola handover di sincronizzazione, contenuta nel messaggio, per passare dalla misura di pseudorange del codice C/A a quella del codice P. Il ricevitore GPS utilizza questo tipo di misura per eseguire il posizionamento in tempo reale. L’osservazione simultanea di quattro satelliti consentirà di determinare la posizione tridimensionale del ricevitore e l’errore dell’orologio, ad una data epoca. La precisione con la quale può essere mantenuto il picco di correlazione (e quindi la precisione con la quale può essere fatta una misura di pseudo-range) secondo una regola pratica viene stimata essere l’1% del periodo tra le epoche di due codici successivi. Per il codice P due epoche successive sono separate da 0.1mS , pertanto la precisione nella misura sarà di un nanosecondo (10-9) e conseguentemente una precisione nella misura della distanza di 30 cm. Per il codice C/A le precisioni sono inferiori esattamente di un decimo, pertanto la precisione nella misura delle distanze è di 3 m.")
36
Posizione del punto Accuratezza m Un singolo ricevitore, se usa il codice C/A, fornisce un’accuratezza di navigazione teorica di circa m 20

37
Posizione del punto Se, invece, si usasse il codice P
Accuratezza 1,5 - 3 m Se, invece, si usasse il codice P l’accuratezza teorica potrebbe essere di 1,5 - 3 m ma 20

38
Anti-Spoofing (AS) A partire da 1990 il codice P è stato crittografato dal DoD con l’uso di un codice segreto W Il nuovo codice generato si chiama “codice Y”. Può essere decifrato solo dai militari e da pochi Enti autorizzati dal DoD Attraverso particolari tecniche l’effetto dell’AS può essere minimizzato ma non eliminato completamente AS non è sinonimo di S/A 21

39
Disponibilità Selettiva (S/A)
30m 100m In teoria l’accuratezza della posi-zione di un punto con il codice C/A è di m P Il Ministero della Difesa degli Stati Uniti (DoD) 2 maggio 2000 ha dismesso la SA (Selective Availability) +/- 100m (95%) P = Posizione Vera 22
 2 maggio 2000 ha dismesso la SA (Selective Availability) +/- 100m (95%) P = Posizione Vera. 22.")
40
Posizione di un punto Accuratezza 20 – 30 m Quindi un solo ricevitore fornisce un’accuratezza di posizione che varia da 15 a più di 30 m. Tale valore varia istante per istante. 23

41
Vantaggi : Svantaggi : Uso di un solo ricevitore
Posizione in tempo reale Svantaggi : Scarsa precisione T 18

42
La misura della distanza con l’uso della fase
2

43
Determinazione della distanza con l’uso delle fasi
Osservazione della fase La lunghezza d’onda del segnale è di 19,05 cm su L1 e di 24,45 cm su L2 Il ricevitore confronta la fase generata con quella che riceve dal satellite Il numero intero delle lunghezze d’onda non è conosciuto al momento della accen-sione del ricevitore (ambiguità iniziale) Durante il tracciamento del segnale si pos-sono osservare cambiamenti nella distan-za (l’ambiguità iniziale resta costante se non si perde il contatto con il satellite) Fase ricevuta dal satellite Fase generata dal ricevitore T D = c TN 19
 Durante il tracciamento del segnale si pos-sono osservare cambiamenti nella distan-za (l’ambiguità iniziale resta costante se non si perde il contatto con il satellite) Fase ricevuta. dal satellite. Fase. generata. dal ricevitore. T. D = c TN. 19.")
44
Ambiguità iniziale della fase
Per ottenere buoni risultati l’ambiguità iniziale della fase deve essere determinata con certezza Tempo (0) Tempo (i) Ambiguità Ambiguità Misura della fase Variazione della distanza Misura della fase 30
 Tempo (i) Ambiguità. Ambiguità. Misura della fase. Variazione della distanza. Misura della fase. 30.")
45
l’accuratezza teorica potrebbe essere di pochi cm.
Posizionamento con la fase Accuratezza pochi cm Con le fasi l’accuratezza teorica potrebbe essere di pochi cm. 1-23 20

46
Sorgenti d’errore 2

47
Sorgenti d’errore Errori del satellite: Errori del Ricevitore:
Incertezza dell’orbita Modello della deriva dell’orologio Centro di fase Errori del Ricevitore: Orologio del ricevitore Rumore del ricevitore Errori d’osservazione: Ritardo ionosferico Ritardo troposferico Errori della stazione: Coordinate ecc. appros. Percorso multiplo (Multipath) 1-27 24
")
48
Sorgenti d’errore (errori di osservazione) :
Ionosfera Troposfera 2

49
Sorgenti d’errore (errori della stazione):
Multipath 2

50
Riepilogo degli errori
400 300 Metri 200 100 Multipath Orologio sat. Rumore ric. Effemeridi Troposfera Ionosfera Orologio ric. 25

51
Diminuzione della Precisione (DOP)
In una intersezione inversa tradizionale la distribuzione dei trigonometrici influenza la precisione della posizione Nel rilievo con il GPS la cattiva distribuzione dei satelliti diminuisce la precisione della posizione Esistono vari indici di DOP: GDOP (Globale) Lat, Lon, Quota & Tempo PDOP (Posizione tridimensionale) Lat, Lon & Quota HDOP (Posizione Orizzontale) Lat & Lon VDOP (Posizione Verticale) Solo Quota 32
 Lat, Lon, Quota & Tempo. PDOP (Posizione tridimensionale) Lat, Lon & Quota. HDOP (Posizione Orizzontale) Lat & Lon. VDOP (Posizione Verticale) Solo Quota. 32.")
52
Diminuzione della Precisione (GDOP)
Tutti gli indici DOP provengono dalla navigazione Il GDOP è l’indice che meglio si adatta al topografo Il valore del GDOP varia da 1 (ideale) all’infinito Ottimo GDOP 32
 all’infinito. Ottimo GDOP. 32.")
53
Si può lavorare fino ad un valore massimo di 8
Diminuzione della Precisione (GDOP) Si può lavorare fino ad un valore massimo di 8 Pessimo GDOP 33
 Si può lavorare fino ad un valore massimo di 8. Pessimo GDOP. 33.")
54
Cosa fare per aumentare
l’accuratezza ? 26

55
Usare il GPS Differenziale.
Corso base GPS Usare il GPS Differenziale. 26

56
Vettore della linea di base
Posizionamento Differenziale Nota la posizione del ricevitore di riferimento “A” si può calcolare la posizione del ricevitore mobile “B” I satelliti devono essere tracciati simultaneamente Il posizionamento differenziale: elimina gli errori degli orologi dei satelliti e dei ricevitori minimizza i ritardi atmosferici Vettore della linea di base A B 27

57
Vettore della linea di base
Accuratezza nel posizionamento differenziale Usando il codice C/A si ha un’accuratezza di 0.5 m - 5 m Questo risultato è tipico del DGPS Vettore della linea di base A B 28

58
Vettore della linea di base
Accuratezza nel posizionamento differenziale Usando sia la fase che il codice si ha un’accuratezza di mm + 1ppm Vettore della linea di base A B 29

59
Vantaggi del differenziale:
Attenuazione degli errori Massima precisione Svantaggi : Post-elaborazione dei dati T 18

60
Riassunto sul posizionamento GPS
Con un solo ricevitore che usa il codice la posizione di un punto ha un’accuratezza di 15 m m Dipende dal valore della Disponibilità Selettiva (S/A) Può essere sufficiente anche 1 sola epoca
 Può essere sufficiente anche 1 sola epoca.")
61
Riassunto sul posizionamento GPS
Utilizzando due ricevitori che tracciano simultaneamente 4 satelliti (preferibilmente 5) si ha un’accuratezza, rispetto alla Stazione di Riferimento, che varia da 0.5 cm (fase) a 5 m (codice)
 si ha un’accuratezza, rispetto alla Stazione di Riferimento, che varia da 0.5 cm (fase) a 5 m (codice)")
62
E’ importante ricordare che se la tecnica differenziale usa:
Riassunto sul posizionamento GPS E’ importante ricordare che se la tecnica differenziale usa: il Codice si ha un’accuratezza metrica la Fase si ha un’accuratezza centimetrica

63
Wide Area Augmentation System
Geostationary WAAS satellites GPS Constellation Local Area System (LAAS) WAAS Control Station (East Coast) WAAS Control Station (West Coast) 2
 WAAS Control Station (East Coast) WAAS Control Station (West Coast) 2.")
64
Wide Area Augmentation System (WAAS)
Si basa su un sistema di correzione in tempo reale 25 stazioni di riferimento al suolo negli Stati Uniti Le Master Stations inviano le correzioni GPS La correzione differenziale viene inviata con un messaggio broadcast dai satelliti WAAS geostazionari Precisione entro i 3m nel 95% dei casi Si richiede solo WAAS enabled GPS

Presentazioni simili











 e una a Noto (Sicilia). In un futuro prossimo, entrerà a fare parte di questa rete.>")


 Un satellite.>")

 avviene su un doppino con duplexing (uplink.>")




 DIGITALE-ANALOGICI (DAC)>")