Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

6
Scegliendo, invece, una rappresentazione con variabili complesse si ottiene:

7
oppure

8
Quando il motore asincrono è alimentato mediante un convertitore statico, la tensione e la corrente applicate al motore presentano varie armoniche sovrapposte alla fondamentale. Con le ipotesi semplificative introdotte per ricavare il modello del motore, se si suppone che la velocità di rotazione del motore possa essere considerata rigorosamente costante e si mantiene costante anche la velocità di rotazione del sistema di riferimento, il comportamento dei circuiti elettromagnetici è lineare. Pertanto, gli andamenti delle correnti e dei flussi possono essere ricavati prendendo in considerazione separatamente le diverse armoniche.

9
La linearità non è, invece, valida per quanto concerne la coppia elettromagnetica, in quanto nella sua espressione compaiono prodotti tra variabili. Le caratteristiche statiche del motore asincrono saranno, quindi, determinate considerando dapprima l’effetto dell’armonica fondamentale della tensione di alimentazione ed esaminando, poi, l’influenza delle armoniche di ordine superiore.

10
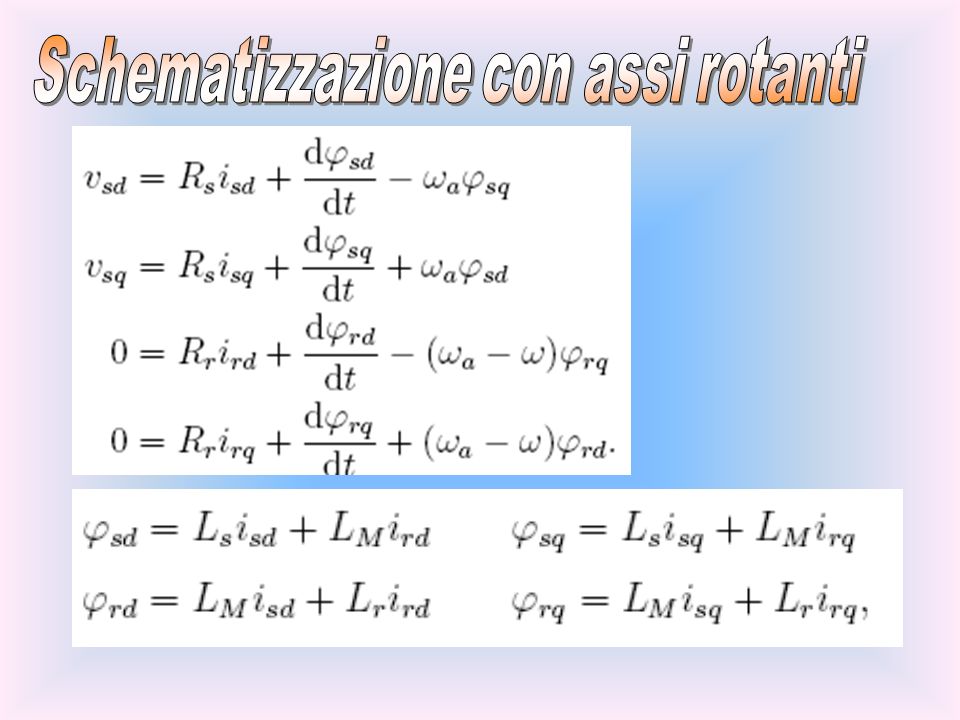
Per ricavare le caratteristiche statiche del motore asincrono alimentato con una terna simmetrica di tensioni sinusoidali, è conveniente impiegare il modello bifase della macchina, riferito a una coppia di assi ortogonali d e q rotanti con una velocità a, pari alla pulsazione delle tensioni di alimentazione. Con tale scelta, infatti, le tensioni v sd e v sq sono costanti; pertanto, a regime permanente, tutte le grandezze elettromagnetiche risulteranno costanti.

11
Partendo dalla rappresentazione con variabili complesse del modello circuitale: particolarizzando il modello del motore per il regime permanente (cioè, ponendo pari a zero le derivate dei flussi) e sostituendo le espressioni dei flussi in funzione delle correnti,
 e sostituendo le espressioni dei flussi in funzione delle correnti,")
12
in cui s rappresenta lo scorrimento relativo, definito come: si ricava:

13
Le precedenti equazioni permettono di ricavare un semplice schema equivalente monofase del motore asincrono trifase, che consente di descriverne il comportamento a regime permanente con alimentazione sinusoidale. Moltiplicando ambo i membri della equazione relativa ai circuiti rotorici per 1/s si ottiene:

14
e, quindi:

15
Le precedenti equazioni descrivono il comportamento a regime permanente del circuito rappresentato in figura che, a parte l’assenza della resistenza (in parallelo ad L M ) che tiene conto delle perdite nel ferro, coincide con il classico circuito monofase equivalente della macchina asincrona.
 che tiene conto delle perdite nel ferro, coincide con il classico circuito monofase equivalente della macchina asincrona.")
16
Per mettere in evidenza i fenomeni energetici, è conveniente suddividere la resistenza R r /s nella somma di due resistenze R r e R r (1-s)/s, Potenza trasferita da elettrica a meccanica
/s, Potenza trasferita da elettrica a meccanica")
17
Riscrivendo con variabili reali il modello del motore

18
Particolarizzando per il regime permanente x x x x

19
sostituendo alle componenti dei flussi le loro espressioni

20
e scegliendo la posizione iniziale del sistema di riferimento in modo tale che la componente diretta, V sd, sia pari al modulo V s del vettore rappresentativo della tensione statorica (componente in quadratura, V sq nulla), si ottiene il seguente sistema di quattro equazioni:
, si ottiene il seguente sistema di quattro equazioni:")
21
Risolvendo il sistema si ricava: essendo:

22
cioè:

23
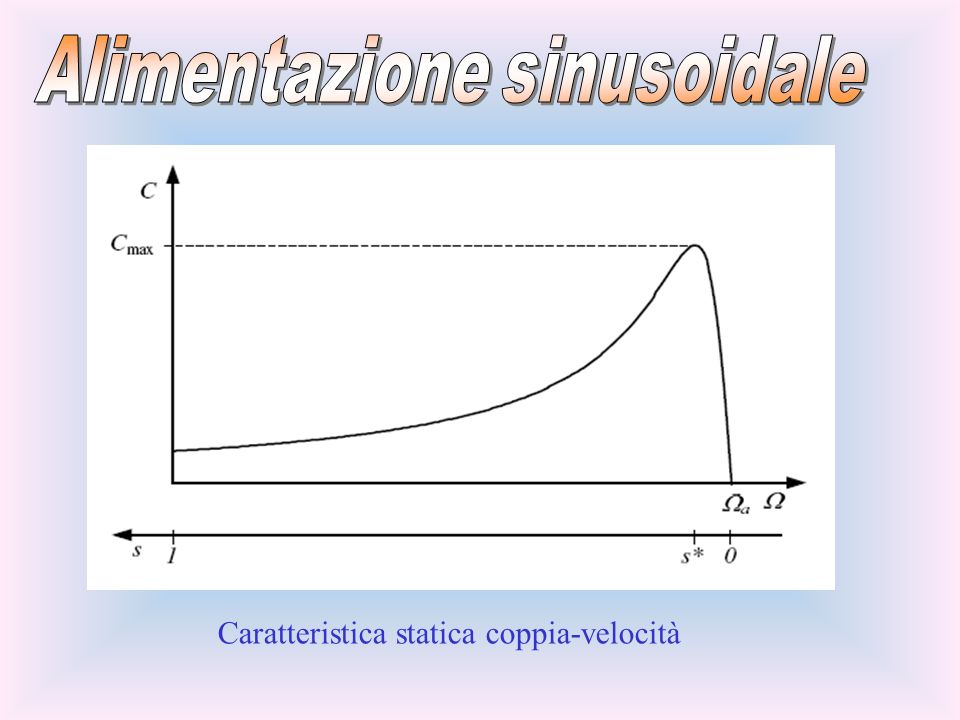
Caratteristica statica coppia-velocità

24
Scorrimento di coppia massima (o di rovesciamento): Coppia massima:
: Coppia massima:")
25
essendo: cioè: Dalle espressioni delle componenti della corrente storica si ricava il modulo

26
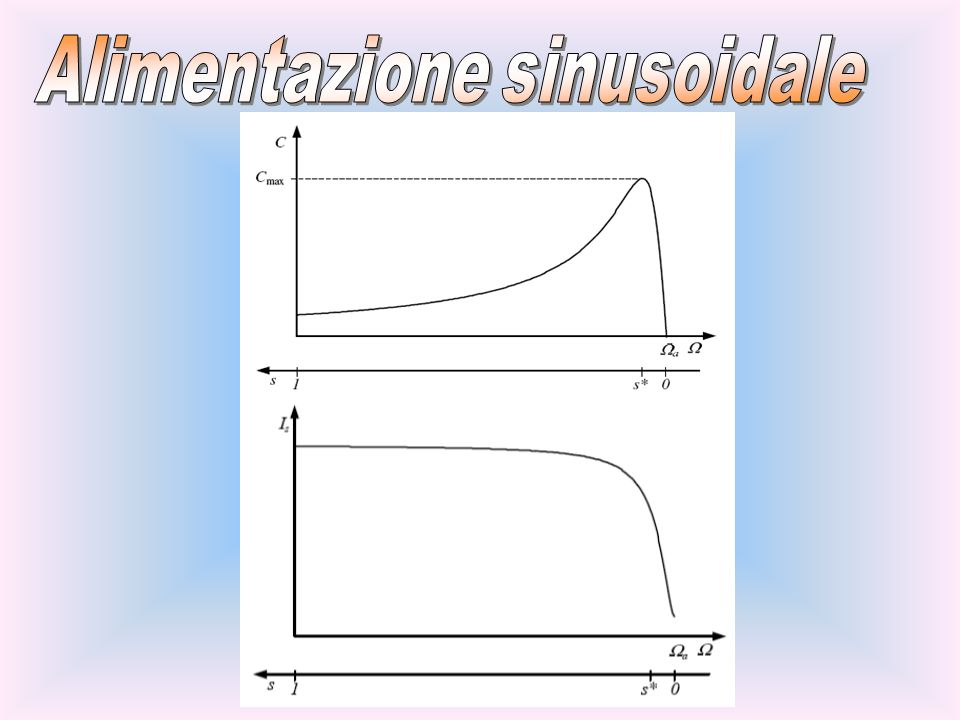
Caratteristica statica corrente-velocità

27
Osservando le due caratteristiche statiche, si può notare che, quando lo scorrimento supera il valore s*, la coppia elettromagnetica diminuisce mentre la corrente assorbita aumenta; non è, quindi, conveniente far funzionare il motore con valori dello scorrimento maggiori di s*.

28
Per quanto concerne le potenze si ha:

29
Il rendimento del motore è, quindi, paria a: Trascurando la potenza dissipata sulla resistenza statorica si ha:

30
Caratteristica statica rendimento-velocità

31
Caratteristica statica completa

32
Componenti e modulo del flusso rotorico (verranno riprese in seguito)
")
33
Legami corrente statorica - flusso rotorico Modulo Angolo tra i due vettori (corrente in anticipo)
")
34
Il modello del motore è stato ricavato considerando una macchina con rotore avvolto o con un rotore a gabbia esterna. Quando il motore è alimentato dalla rete, all’atto dell’inserzione in rete lo scorrimento è pari ad 1; in tale condizione, se si utilizzasse un motore a gabbia esterna, si otterrebbe una coppia motrice molto inferiore a quella di rovesciamento e una corrente statorica notevolmente superiore a quella nominale del motore.

36
Per ovviare a questi inconvenienti, nei motori con rotore a gabbia destinati ad una alimentazione da rete, il circuito rotorico viene realizzato in modo tale che la resistenza rotorica vari al variare dello scorrimento (rotore a gabbia profonda o a doppia gabbia)
")
37
Caratteristica statica di un motore a doppia gabbia

38
Le armoniche prodotte dal dispositivo di alimentazione del motore generano vari fenomeni indesiderati, quali perdite addizionali nel rame e nel ferro della macchina e coppie di tipo alternativo; il loro contributo sul valore medio della coppia elettromagnetica risulta, invece, del tutto trascurabile.

39
quando la frequenza di alimentazione è sufficientemente elevata si ottiene: Da

40
Caratteristica statica coppia-velocità

42
Per quanto concerne le perdite nel rame, si può osservare che, mentre il valore della resistenza del circuito statorico può essere considerato costante al variare della frequenza delle armoniche, quello del circuito rotorico aumenta all’aumentare della frequenza, in quanto l’effetto pelle è molto più pronunciato nel rotore a causa del maggiore spessore delle barre. Per quanto concerne le perdite nel ferro, la presenza delle armoniche crea sostanzialmente un incremento delle perdite dovute ai fenomeni parassiti.

43
In generale, l’alimentazione distorta comporta un incremento complessivo di perdite, rispetto alle usuali perdite connesse ad una alimentazione sinusoidale, inferiore al 10%.

44
Quando il motore è alimentato mediante un inverter a tensione impressa, per ottenere un buon comportamento della macchina, è necessario che: la forma d’onda della tensione applicata a ciascuna fase non presenti né subarmoniche né armoniche di ordine pari di ampiezza apprezzabile; le tensioni applicate alle tre fasi abbiano lo stesso andamento temporale e siano sfasate tra loro di un terzo di periodo*. * In questa situazione, le armoniche di ordine multiplo di 3 non producono alcun effetto sul motore.

45
Le altre armoniche, generano, invece, delle coppie alternative di frequenza multipla di 6 volte quella della tensione di alimentazione. Una trattazione dettagliata delle armoniche di coppia è riportata nel testo; ci si limiterà a precisare che, escluso per potenze alquanto elevate, il contenuto armonico della coppia motrice è del tutto soddisfacente quando si alimenta il motore con un inverter a tensione impressa mentre è significativo quando si alimenta il motore con un inverter a corrente impressa.

46
Andamento temporale della coppia prodotta da un motore asincrono alimentato con inverter a corrente impressa.

Presentazioni simili








 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")





>")
 Cenni di teoria dell’elasticità, sforzi e deformazioni, l’equazione delle onde elastiche.>")



 Generalità di Tipo Costruttivo>")

 Reti Elettriche Parte II Revisione aggiornata al 24 maggio 2011 (www.elettrotecnica.unina.it)>")