Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
“Progettazione ed implementazione di un sistema digitale di elaborazione vettoriale per trattamento dati di radar ottici a doppia modulazione di ampiezza” Candidato Andrea Roello Relatore Prof. M.Salmeri Correlatore Ing. C. Neri Correlatore Prof. S. Bertazzoni UNIVERSITA’ DEGLI STUDI DI ROMA TOR VERGATA

2
Sommario Descrizione generale del Radar Ottico e del suo principio di funzionamento Descrizione del Radar Ottico IVVS Esposizione del blocco di elaborazione dati realizzato Risultati ottenuti e sviluppi futuri del sistema

3
Descrizione del radar ottico AM Il Radar Ottico a modulazione di ampiezza (AM) è uno strumento di telerilevamento che consente di effettuare, a distanza e senza contatto, immagini bidimensionali e tridimensionali di un ambiente o di un oggetto.
 è uno strumento di telerilevamento che consente di effettuare, a distanza e senza contatto, immagini bidimensionali e tridimensionali di un ambiente o di un oggetto.")
4
Descrizione del radar ottico AM Diretta estensione a frequenze ottiche delle tecniche utilizzate per i radar ad onda continua λ compresa tra 0.7 e 3 μm Sorgente: laser a semiconduttore Risoluzione submillimetrica nelle tre direzioni spaziali su distanze dell’ordine delle decine di metri

5
Risultati ottenuti in laboratorio FotocameraRadar Ottico Immagini 2D

6
Risultati ottenuti in laboratorio FotocameraRadar Ottico Immagini 3D

7
Principio di funzionamento di un radar ottico Il principio alla base del sistema di misura del radar ottico è il “tempo di volo” t L impegato dal segnale ottico emesso dalla sorgente laser per percorrere la distanza radar-bersaglio e ritorno. Foto- rivelatore L Sorgente Target

8
Principio di funzionamento di un radar ottico Foto- rivelatore L Sorgente Target Il principio alla base del sistema di misura del radar ottico è il “tempo di volo” t L impegato dal segnale ottico emesso dalla sorgente laser per percorrere la distanza radar-bersaglio e ritorno.

9
Principio di funzionamento di un radar ottico a modulazione di ampiezza Nel R.O. a modulazione di ampiezza l’intensità della sorgente ottica viene modulata sinusoidalmente alla frequenza f m ( 79,5 MHz in IVVS ). Il segnale ottico ricevuto dopo un tempo di volo t L è ancora modulato in ampiezza alla frequenza f m e in conseguenza della propagazione presenta uno sfasamento rispetto alla sorgente pari a:
. Il segnale ottico ricevuto dopo un tempo di volo t L è ancora modulato in ampiezza alla frequenza f m e in conseguenza della propagazione presenta uno sfasamento rispetto alla sorgente pari a:.")
10
Principio di funzionamento di un radar ottico a modulazione di ampiezza Combinando le due relazioni precedenti si ricava: Perciò dalla misura dello sfasamento è possibile risalire alla distanza del bersaglio. Misurando anche l’intensità istantanea del segnale riflesso si riescono ad effettuare delle immagini fotografiche dettagliate dell’ambiente scansionato.

11
Attualmente presso l’ENEA di Frascati è in fase avanzata di test il Radar Ottico a modulazione di ampiezza IVVS. Il Radar Ottico IVVS L’elemento fondamentale di IVVS è il probe di scansione realizzato interamente con materiali RadHard e connesso all’apparato elettronico esclusivamente tramite delle fibre ottiche.

12
ITER: International Thermonuclear Experimental Reactor

13
Il Radar Ottico IVVS

14
Schema di principio del Radar Ottico a modulazione di ampiezza IVVS Fibra ottica Digital Receiver

15
f 22 f 22 Schema del Digital Receiver

16
f 22 f 22 Filtraggio e conversione A/D

17
f 22 f 22 Schema del Digital Receiver Moltiplicazione per un segnale complesso

18
f 22 f 22 Schema del Digital Receiver Filtraggio

19
f 22 f 22 Schema del Digital Receiver Prodotti incrociati

20
f 22 f 22 Schema del Digital Receiver Vettore Y

21
Conversione coordinate rettangolo polari f 22 f 22 Schema del Digital Receiver

22
f 22 f 22 FASE AMPIEZZA DISTANZA SCALA DI GRIGIO Schema del Digital Receiver

23
Algoritmo CORDIC COordinate Rotation DIgital Computer Sviluppato originariamente da Jack Volder come soluzione real-time per affrontare i problemi di navigazione Permette di realizzare il calcolo di tutte le funzioni trigonometriche tramite la rotazione vettoriale

24
Algoritmo CORDIC COordinate Rotation DIgital Computer (x 0,y 0 ) X Y X Y Il vettore in ingresso viene portato a coincidere con l’asse delle ascisse tramite una serie di iterazioni (ρ,φ) (x 0,y 0 )
 X Y X Y Il vettore in ingresso viene portato a coincidere con l’asse delle ascisse tramite una serie di iterazioni (ρ,φ) (x 0,y 0 )")
25
Algoritmo CORDIC COordinate Rotation DIgital Computer (x 0,y 0 ) X Y X Y La fase viene memorizzata in un accumulatore ad ogni passaggio, il modulo coincide con l’ascissa del vettore in uscita (ρ,φ)
 X Y X Y La fase viene memorizzata in un accumulatore ad ogni passaggio, il modulo coincide con l’ascissa del vettore in uscita (ρ,φ)")
26
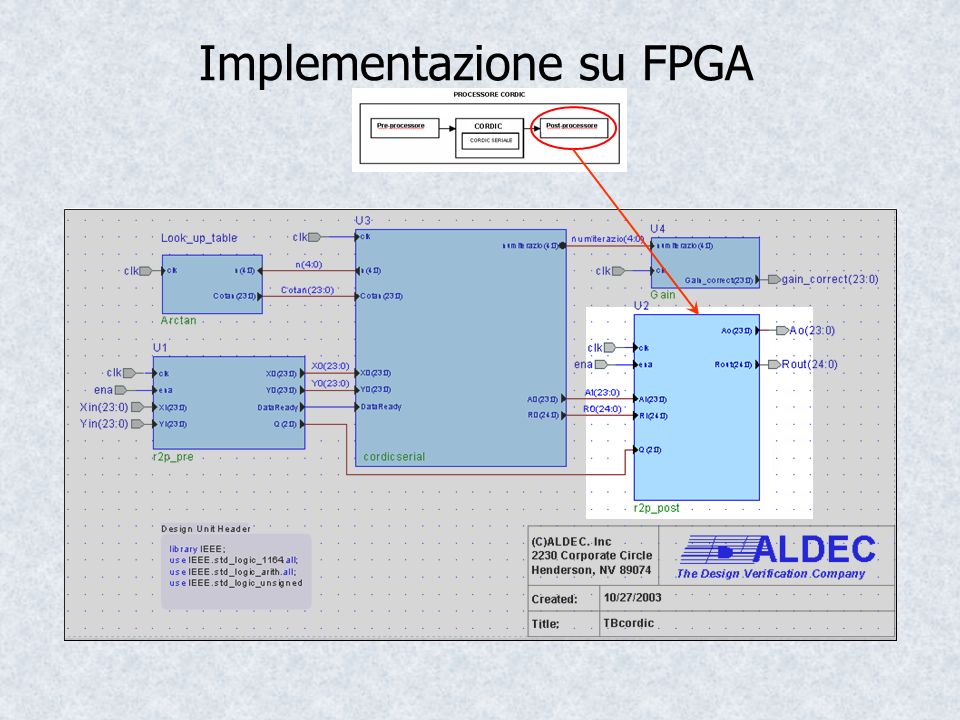
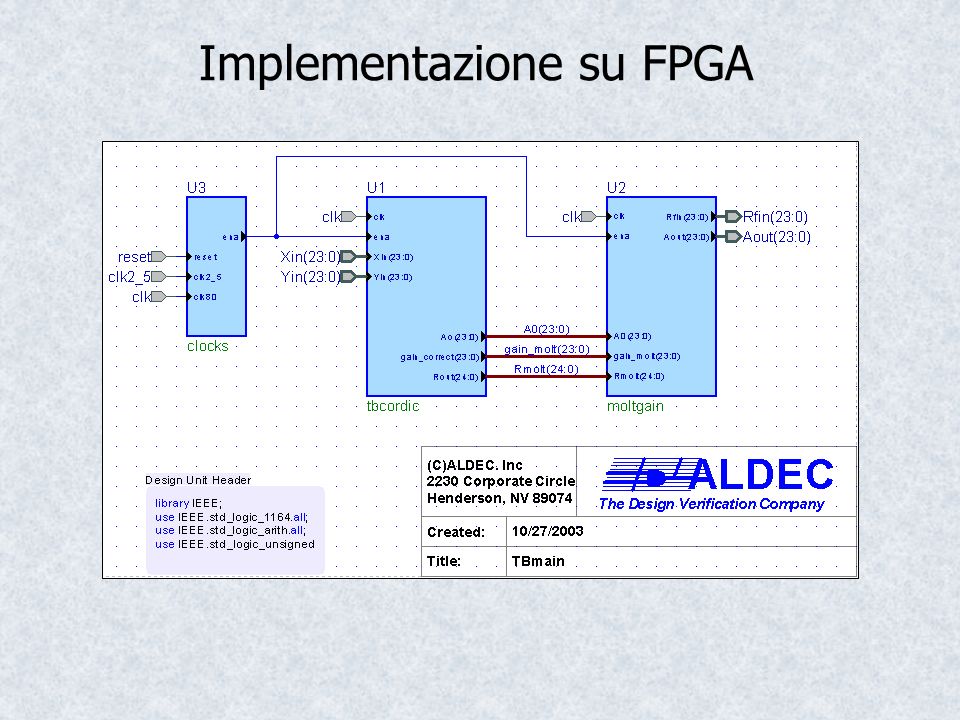
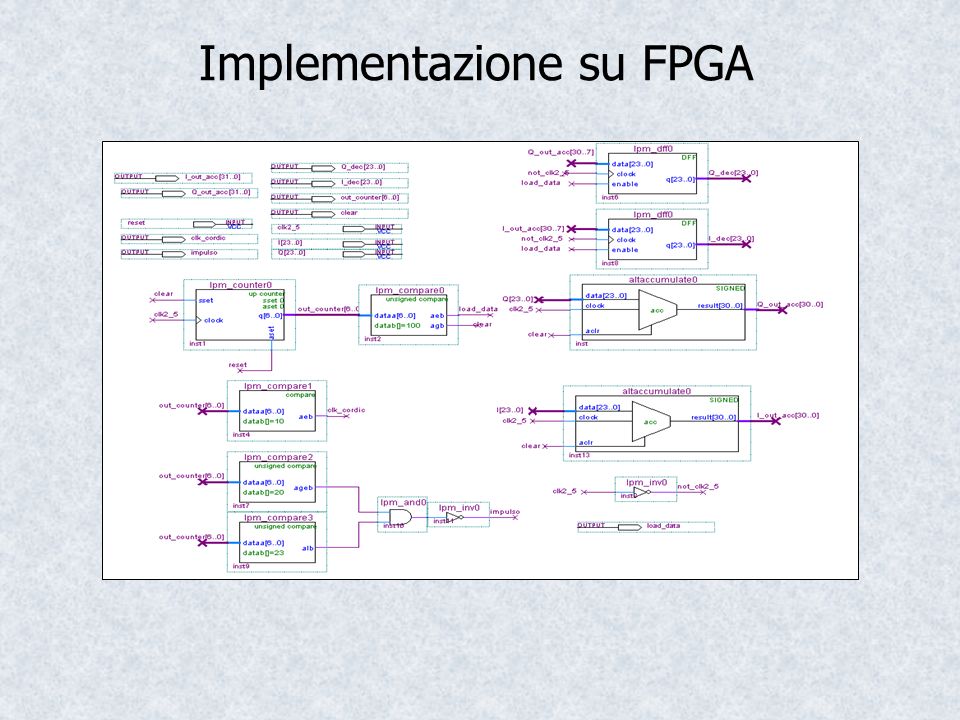
Implementazione su FPGA Due software di sviluppo utilizzati: Aldec Active HDL v.5.1 Altera Quartus II v.2.2

27
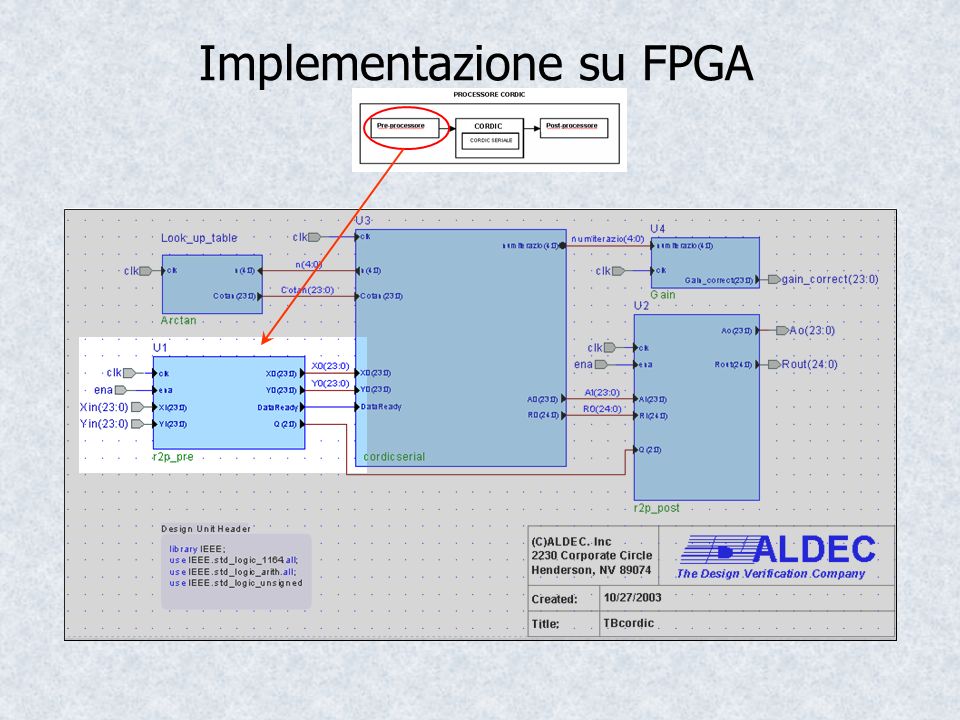
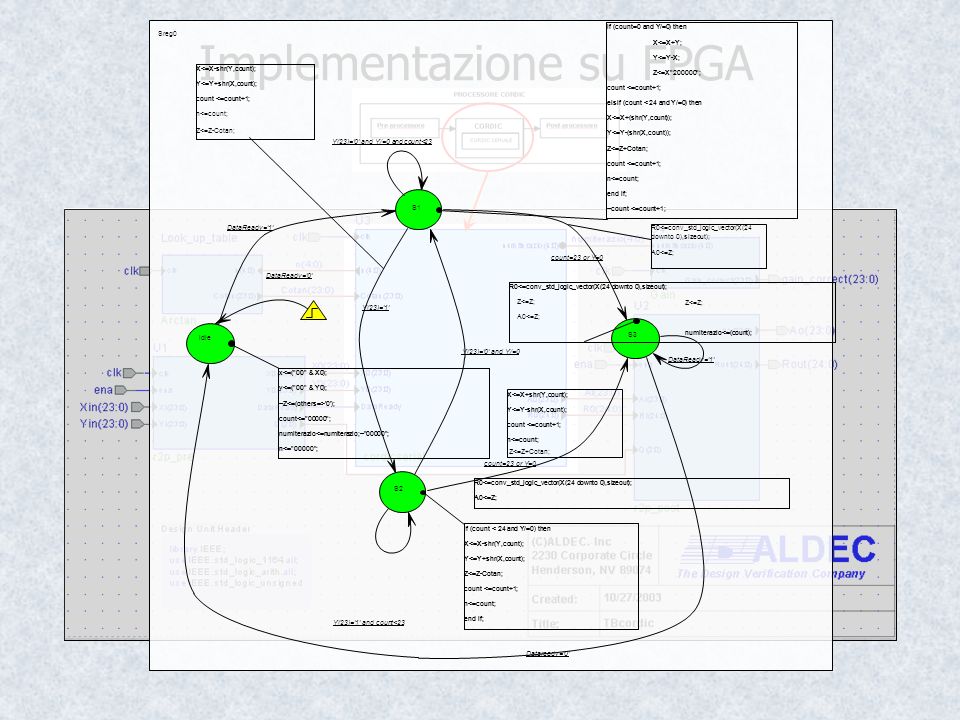
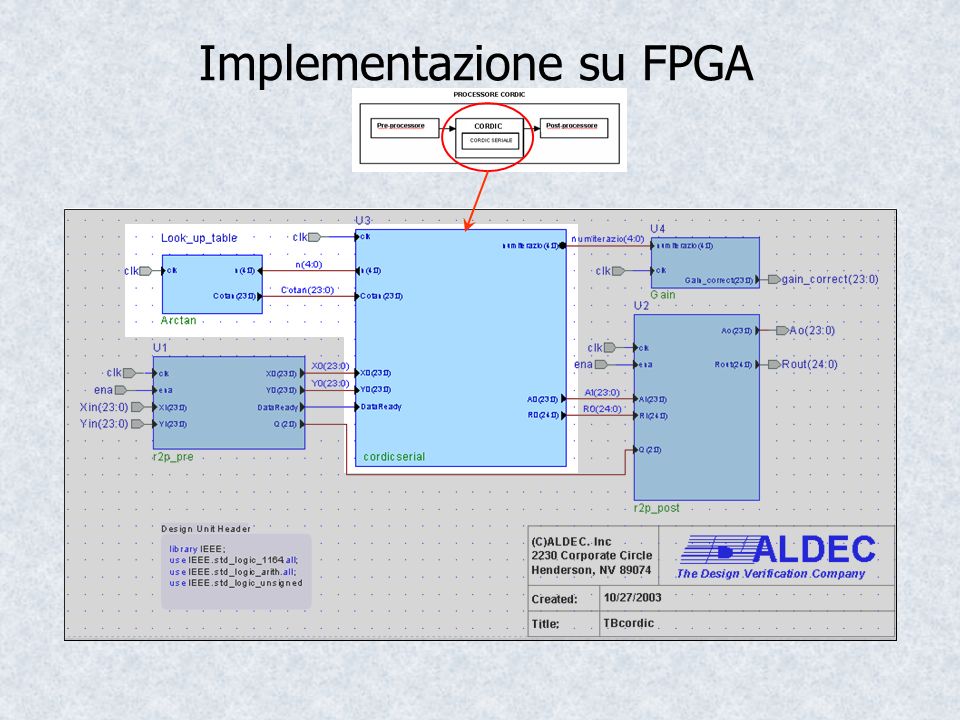
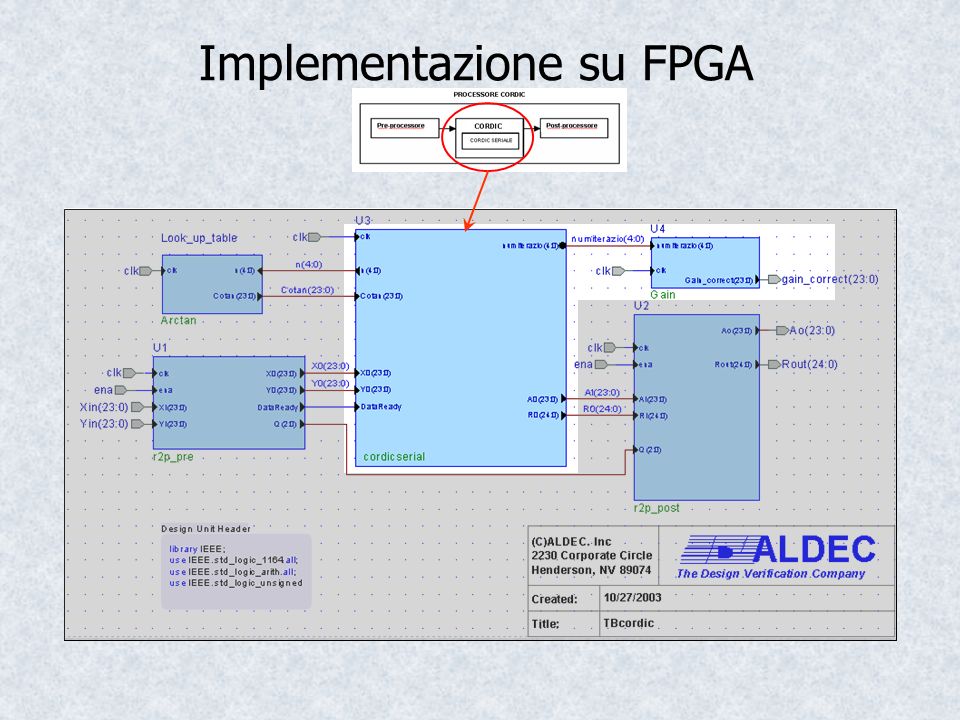
Implementazione su FPGA Processore CORDIC

28
Implementazione su FPGA Processore CORDIC (x 0,y 0 ) X Y (x ’,y ’ ) X Y Q= (Q 2 Q 1 Q 0 )
 X Y (x ’,y ’ ) X Y Q= (Q 2 Q 1 Q 0 )")
29
Implementazione su FPGA Processore CORDIC (x ’,y ’ ) X Y FASE ( Φ) AMPIEZZA (R) Q= (Q 2 Q 1 Q 0 )
 X Y FASE ( Φ) AMPIEZZA (R) Q= (Q 2 Q 1 Q 0 )")
30
Implementazione su FPGA Processore CORDIC (x ’,y ’ ) X Y FASE ( Φ) AMPIEZZA (R) Q= (Q 2 Q 1 Q 0 ) + ΔΦ
 X Y FASE ( Φ) AMPIEZZA (R) Q= (Q 2 Q 1 Q 0 ) + ΔΦ")
31
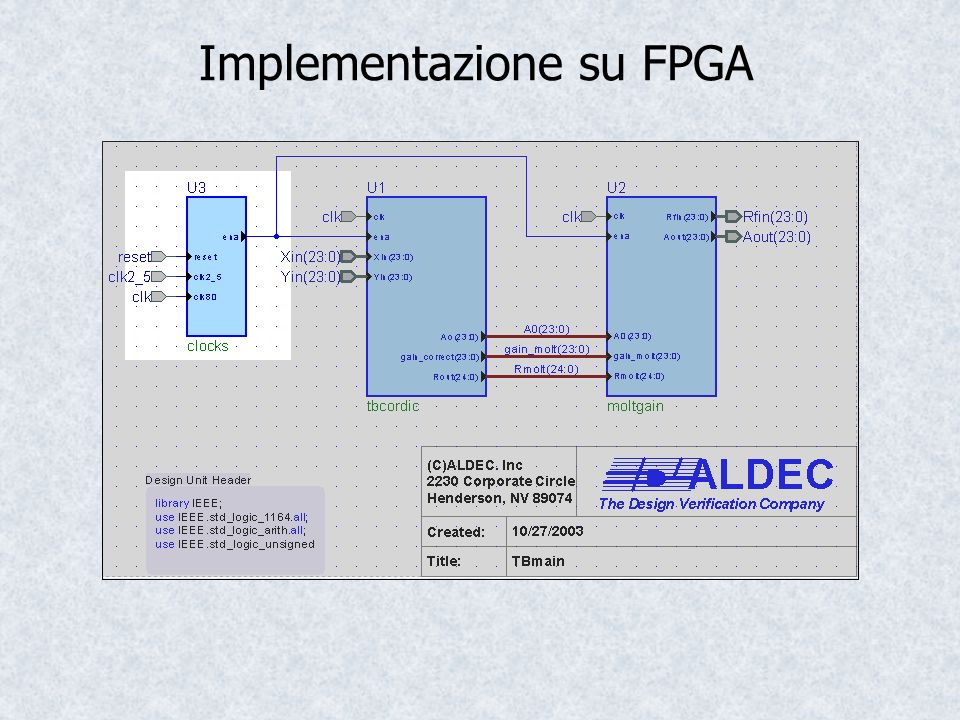
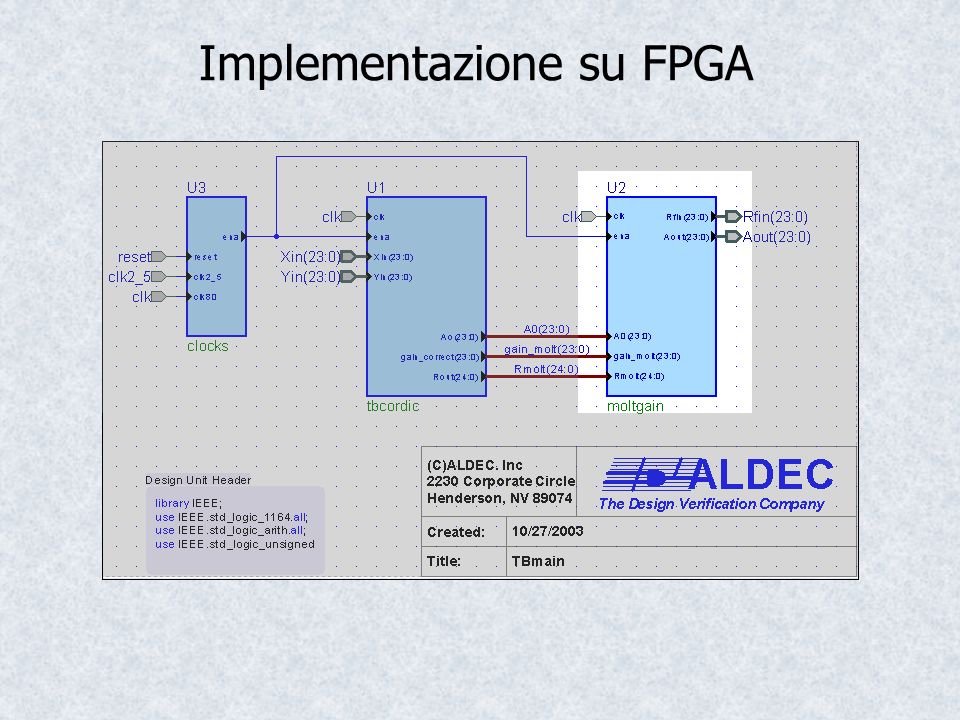
Implementazione su FPGA

41
Simulazioni software Risoluzione in fase: decimo di grado Risoluzione in ampiezza: una parte su un milione

42
Conclusioni Obiettivi raggiunti Realizzazione ed implementazione su FPGA del blocco di conversione di coordinate rettangolo-polari ed integrazione con il sistema precedentemente realizzato Sviluppi Futuri Implementazione di una doppia modulazione di ampiezza per aumentare il range di misura del sistema senza degradarne la precisione

Presentazioni simili
>")


















