Scaricare la presentazione
1
Progetto di un sistema di parcheggio automatizzato basato su
ISTITUTO TECNICO INDUSTRIALE STATALE “G. MARCONI” – Dalmine(Bg) Progetto di un sistema di parcheggio automatizzato basato su PLC S7-300 Bruno Matarazzo 5AET
 Progetto di un sistema di parcheggio automatizzato basato su. PLC S Bruno Matarazzo. 5AET.")
2
Problematiche urbanistiche
Il numero di autoveicoli circolanti in Italia è di oltre 22 milioni; poiché ogni veicolo necessita in media di 25 m2 per il parcheggio, la superficie complessiva destinata alle aree di parcheggio dovrebbe essere oltre 1 miliardo di metri quadrati La ripartizione del tempo tra movimento e sosta dei veicoli è fortemente sbilanciata verso la sosta Nelle zone centrali della città, poi, solo 10 autoveicoli su 100 sono in movimento

3
Parcheggio meccanizzato automatico
Il parcheggio meccanizzato automatico consiste in un contenitore/magazzino di automobili ad uno o a più piani (fuori terra o interrati), provvisto di un sistema di movimentazione e stoccaggio di autovetture totalmente meccanizzato e computerizzato
, provvisto di un sistema di movimentazione e stoccaggio di autovetture totalmente meccanizzato e computerizzato.")
4
Un maggior sfruttamento di superfici e di volumi
Vantaggi Un maggior sfruttamento di superfici e di volumi A parità di posti auto realizzabili, si richiedono scavi di volumi minori; ciò comporta minori costi di scavo e minori disturbi alla circolazione locale e alla vita di quartiere durante il periodo dei lavori. Riduzione dei complessi e costosi impianti di servizio dei parcheggi tradizionali Completa automazione anche nella gestione, senza necessità di presenza di personale Sicurezza per l’utente, per il quale trovarsi di notte in locali deserti, seppur protetti e sorvegliati, costituisce un potenziale pericolo Sicurezza per la vettura, che normalmente non è tutelata rispetto alle possibili manovre maldestre degli altri guidatori ed è anche esposta all’azione di eventuali malfattori Assenza di inquinamento nei locali di parcheggio dovuta alla movimentazione a motore spento

5
Materiali utilizzati Vmax = 24 V Imax = 0.3 A Tipologia = Motore DC
Nota aggiuntiva = Bassa coppia Vmax = 24 V Imax = 0.3 A Tipologia = Motore DC Note aggiuntive = Coppia elevata

6
Architettura logica PLC S7-300
PG: Sistema di sviluppo ed esecuzione, nel PG viene effettuata la configurazione hardware CPU: Sistema μP che esegue il ciclo di scansione pel PLC. SM: Modulo di I/O, modulo di segnale.

7
CPU LOAD MEMORY: contiene il programma, è ritentiva (è ritentiva perché devo sempre avere il mio programma anche se spengo il PLC). WORK MEMORY: zona di memoria in cui viene messo il programma in esecuzione. SISTEM MEMORY: è divisa in aree, alcune di queste sono: E : ingressi digitali, viene aggiornata alla fase IPI del ciclo di scansione; A : uscite digitali, viene aggiornata alla fase IPU del ciclo di scansione; T : temporizzatori; Z : contatori; M : merker, serve per gli stati;

8
CICLO DI SCANSIONE Il ciclo di scansione può essere definito l’insieme di tutti i task eseguiti dal sistema operativo del PLC. La struttura più semplice del ciclo di scansione è rappresentata dalla figura

9
Linguaggio di programmazione STEP 7
Struttura delle directory

10
GRAPH Il processo viene suddiviso in singoli passi con un volume di funzioni tra loro ben definite Nei singoli passi vengono stabilite le funzioni da eseguire e i passaggi sono regolati dalle transizioni (condizioni di avanzamento) I comandi sequenziali comandano il processo nell'ordine prestabilito, e in dipendenza di determinate condizioni.
 I comandi sequenziali comandano il processo nell ordine prestabilito, e in dipendenza di determinate condizioni.")
11
GRAPH Una catena lineare comincia con un passo e finisce con una transizione a cui può seguire un salto a un passo qualsiasi o un fine catena. La sequenza lineare può essere ampliata tramite: diramazioni (alternative, simultanee) salti a passi qualsiasi ulteriori catene sequenziali che vengono eseguite in dipendenza dalla prima catena o in modo completamente indipendente operazioni cicliche, disposte prima o dopo la catena sequenziale
 salti a passi qualsiasi. ulteriori catene sequenziali che vengono eseguite in dipendenza dalla prima catena o in modo completamente indipendente. operazioni cicliche, disposte prima o dopo la catena sequenziale.")
12
Azioni con funzioni standard
In questa figura si osserva che al passo “scendi” sono state associate due azioni: (1) finché il passo è attivo, il segnale di uscita down è =1 (2) finché il passo è attivo l’uscita rotate viene impostato a 1 e rimane così impostato.
 finché il passo è attivo, il segnale di uscita down è =1. (2) finché il passo è attivo l’uscita rotate viene impostato a 1 e rimane così impostato.")
13
Azioni che richiamano blocchi
(1) finché il passo è attivo, la variabile “abilita_procedura” è =1. Questa variabile è utilizzata all’interno del blocco FB2. (2) finché il passo è attivo, viene richiamato il blocco FB2 con il relativo blocco dati di istanza DB2. In questa figura viene riportato l’esempio di richiamo del blocco funzionale.(Si ricorda che il blocco funzionale può essere realizzato in qualunque linguaggio di programmazione
 finché il passo è attivo, la variabile abilita_procedura è =1. Questa variabile è utilizzata all’interno del blocco FB2. (2) finché il passo è attivo, viene richiamato il blocco FB2 con il relativo blocco dati di istanza DB2. In questa figura viene riportato l’esempio di richiamo del blocco funzionale.(Si ricorda che il blocco funzionale può essere realizzato in qualunque linguaggio di programmazione.")
14
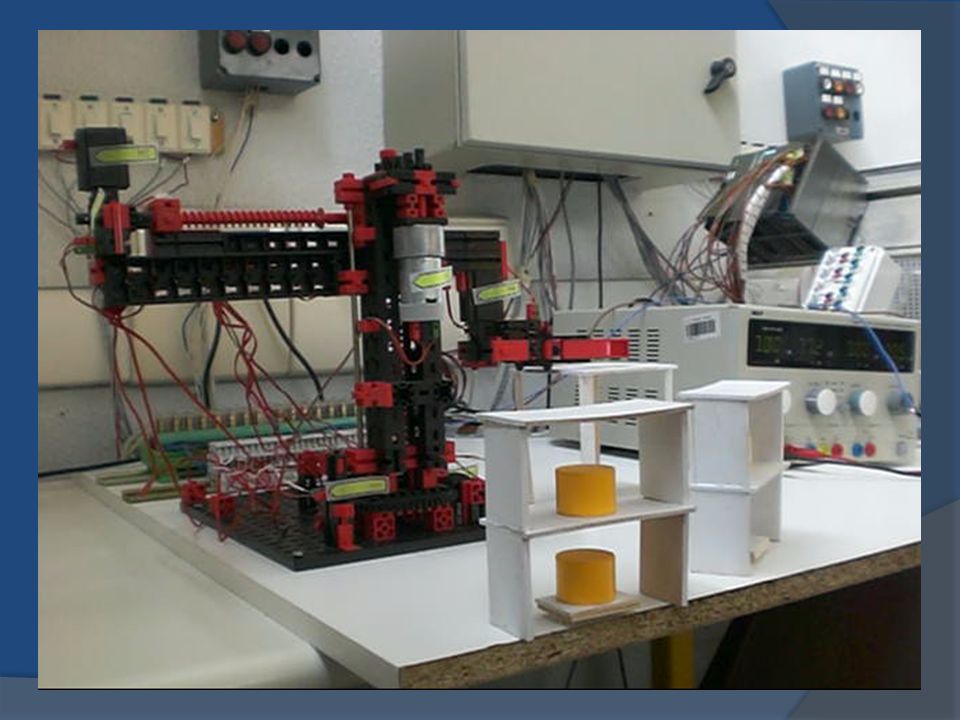
Modello robot industriale II(Fishertechnik)
Sistema finale Computer PLC simatic S7-300 Modello robot industriale II(Fishertechnik) Alimentatore Relè
 Alimentatore. Relè.")
15
codice FB1, catena del box 1

16
codice FB1, esempio di catena contatore



>")











 Il Processore (2)>")

 Lezione 4 (24 ottobre 2008) Architettura del calcolatore: la macchina di Von Neumann.>")

 Inizializzatore: preparazione.>")

 Trattamento dell'informazione. Lab.Calc. I AA 2002/03 - cap.22 Esempio Supponiamo di volere calcolare X, per uno o più possibili valori di Y, in base.>")