Scaricare la presentazione
1
Controllare la prospettiva
Daniele Marini

2
Calcolo analitico P(x,y,z) P(xv,yv) Centro di proiezione
Piano di proiezione

3
... in sezione ... P(x,y,z) yv Centro di proiezione
Piano di proiezione y/yv = z/d yv = y/(z/d) x/xv = z/d xv = x/(z/d)
 x/xv = z/d. xv = x/(z/d)")
4
Frames Il frame è un contesto di:
sistema di riferimento e trasformazioni geometriche associate Usualmente si distinguono due frame principali: World frame, nel quale si descrivono e rappresentano gli oggetti modellati Camera frame, nel quale si definisce il sistema di riferimento necessario alla creazione della proiezione

5
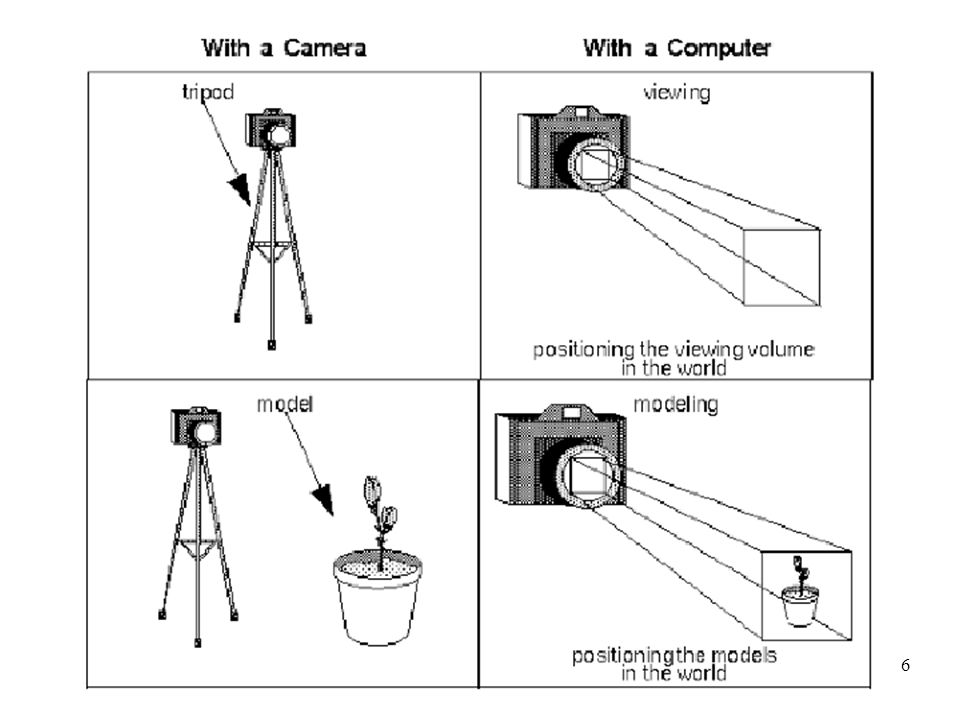
Camera frame Quasi tutti gli ambienti e le librerie adottano la metafora della macchina fotografica: la formazione dell’immagine piana a partire dal modello 3D avviene con un principio di proiezione simile a quello della fotografia L’obiettivo non è modellato (foro stenopeico) Il sistema di riferimento del camera frame si assume fisso: Origine in basso a sinistra del fotogramma X crescente a destra Y crescente in verticale Z entrante o uscente dalla macchina fotografica
 Il sistema di riferimento del camera frame si assume fisso: Origine in basso a sinistra del fotogramma. X crescente a destra. Y crescente in verticale. Z entrante o uscente dalla macchina fotografica.")
7
Prospettiva canonica Camera frame orientato come il world frame
Asse ottico coincidente con asse z, entrante nell’obiettivo Per portare una scena nella configurazione canonica è necessaria una catena di trasformazioni da applicare conoscendo i parametri principali

8
I parametri di controllo
PRP Projection Reference Point o COP Center of Projection View Plane VPN View Plane Normal VUP View UP DOP Direction of Projection (per le proiezioni parallele) VRP View Reference Point CW center of the window
 VRP View Reference Point. CW center of the window.")
9
Orientare il piano di proiezione

10
Definire la viewport e la window

11
Definire il centro di proiezione

12
Se la proiezione è parallela

13
Trasformazioni normalizzate
Dati VPN, VUP si ottiene la view orientation matrix V La forma della V è: V=TR con T traslazione nel VRP, R rotazione opportuna per orientare la view rispetto alla configurazione canonica

14
Matrice canonica di trasformazione prospettica

15
Dalle coordinate omogenee allo spazio 3D

16
Matrice canonica di proiezione parallela ortogonale

17
Funzioni di OpenGL - proiezione parallela ortogonale
glOrtho(xmin, xmax, ymin, ymax, near, far); near e far possono essere anche negativi: non c’e’ divisione per 0
; near e far possono essere anche negativi: non c’e’ divisione per 0.")
18
Trasla origine del view volume nell’origine del view volume canonico
Riscala il view volume P è la matrice di proiezione zmax = far zmin = near completata la trasformazione si può chiamare la glOrtho

19
glOrtho(xmin, xmax, ymin, ymax, near, far);
traslazione al centro del view volume scalatura

20
Proiezioni parallele oblique
q, f Angoli del fascio di proiettori con la normale al piano di proiezione y DOP x z

21
Proiezioni parallele oblique
orientare la direzione di proiezione in modo che sia parallela a z, con trasformazione di shear controllata dagli angoli q, f rinormalizzare il view volume con scala e traslazione (come sopra) proiettare con la matrice ortografica
 proiettare con la matrice ortografica.")
22
Trasformazione di shear e proiezione parallela ortogonale

23
Proiezione parallela generica
Deformare il volume con shear per condursi a ortogonale Ricondursi alla configurazione canonica: normalizzazione Convertire il volume di vista in una configurazione standard: costruzione della matrice di proiezione: opera in “window coordinates” (comprendono z) Proiettare il volume deformato Il volume canonico per la proiezione parallela è normalizzato in -1,+1
 Proiettare il volume deformato. Il volume canonico. per la proiezione parallela. è normalizzato in -1,+1.")
24
Angolo di visione e frustum

25
Funzioni di OpenGL glFrustum(xmin, xmax, ymin, ymax, near, far);
gluPerspective(fovy, aspect, near, far); Aspect = larghezza/altezza della window Fov:
; Aspect = larghezza/altezza della window. Fov:")
26
Prospettiva generica Metodo della projection normalization
Creare la matrice di normalizzazione Deformare lo spazio Proiettare in modo ortografico

27
Prospettiva generica (cont)
Si suppone di proiettare in modo canonico con la distanza del centro di proiezione d=-1 lungo l’asse z la matrice Mpersp diventa:

28
Prospettiva generica (cont)
applichiamo a un punto la matrice non singolare N (simile a Mpersp)
")
29
Prospettiva generica (cont)
dobbiamo determinare a, b assumiamo un angolo di visione di 90° quindi i piani di clipping laterali sono: x=+-z y=+-z dopo la trasformazione i piani diventano: x=+-1 y=+-1 i piani di clipping frontale e di sfondo siano: zmin<zmax<0 vogliamo imporre che siano in -1 e +1 per avere il volume canonico

30
Prospettiva generica (cont)
zmin e zmax dopo la trasformazione diventano:

31
Prospettiva generica (cont)
la matrice N viene chiamata matrice di normalizzazione prospettica

32
Prospettiva generica (cont)
se il frustum non fosse simmetrico e a 90° ci si può ricondurre a questo caso con una trasformazione di shear

33
Altri schemi Lo schema illustrato è tipico delle librerie PHIGS, GKS 3D OpenGl offre anche un altro approccio: lookAt Nei simulatori di volo si adotta lo schema “roll, pitch, yaw”

34
LookAt E’ un metodo più diretto e più naturale:
la camera è localizzata in un punto e (eypoint - o punto di vista) specificato nel world frame La camera è orientata nella direzione individuata dal vettore congiungente e con il punto a (at point - punto osservato) I punti e ed a individuano il VRP e la VPN Gli ultimi tre parametri identificano il VUP gluLookAt(eyex, eyey, eyez, aty, atx, atz, upx, upy, upz);
 specificato nel world frame. La camera è orientata nella direzione individuata dal vettore congiungente e con il punto a (at point - punto osservato) I punti e ed a individuano il VRP e la VPN. Gli ultimi tre parametri identificano il VUP. gluLookAt(eyex, eyey, eyez, aty, atx, atz, upx, upy, upz);")
36
Roll, pitch (head), yaw
, yaw")








 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")












