Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

2
Modellistica e Simulazione dei Sistemi Meccanici
Meccatronica e Modellistica? Mechatronics is centered on mechanics, electronics, computing, control engineering. …material engineering… which, combined, make possible the generation of simpler, more economical, reliable and versatile systems. The portmanteau "mechatronics" was coined by Tetsuro Mori, the senior engineer of the Japanese company Yaskawa in 1969

3
Modellistica e Simulazione dei Sistemi Meccanici
Un Sistema Meccatronico è costituito da: una parte meccanica, formata in genere da più corpi (rigidi o flessibili) connessi tra loro in modo da consentire moti relativi (sist. Multicorpo) azionamenti (elettrici, pneumatici etc.) sensori controllore Il modello di tale sistema deve comprendere questi elementi
 connessi tra loro in modo da consentire moti relativi (sist. Multicorpo) azionamenti (elettrici, pneumatici etc.) sensori. controllore. Il modello di tale sistema deve comprendere questi elementi.")
4
Modellistica e Simulazione dei Sistemi Meccanici
Meccatronica e Modellistica? La progettazione meccatronica richiede la capacità di modellare e simulare il comportamento di un sistema meccanico, anche considerando l’interazione con i sistemi di controllo e gli azionamenti. Il modello virtuale del sistema consente di effettuare test veloci, di prevederne il comportamento ed individuare eventuali criticità

5
Modellistica e Simulazione dei Sistemi Meccanici
Le metodologie di modellazione possono poi essere implementate in programmi di calcolo che consentono la “sperimentazione” su prototipi virtuali con risparmio di costi e tempi rispetto a test su prototipi fisici. I pacchetti commerciali (MSC.ADAMS) “nascondono” la parte di scrittura e soluzione delle equazioni lasciando all’utente la modellazione geometrica e l’ingresso dei dati
 nascondono la parte di scrittura e soluzione delle equazioni lasciando all’utente la modellazione geometrica e l’ingresso dei dati.")
6
Modellistica e Simulazione dei Sistemi Meccanici
Sistema Multicorpo è un insieme di due o più corpi (rigidi o flessibili) collegati tra loro in modo che sia conservata la possibilità di moto relativo F M
 collegati tra loro in modo che sia conservata la possibilità di moto relativo. F. M.")
7
Modellistica e Simulazione dei Sistemi Meccanici
Esempio di sistema multicorpo (meccatronico)?
")
8
Modellistica e Simulazione dei Sistemi Meccanici
Esempio di sistema multicorpo (meccatronico)?
")
9
Modellistica e Simulazione dei Sistemi Meccanici
In ambito biomeccanico si hanno applicazioni all’ergonomia, al trattamento delle disabilità allo sviluppo di ausili per la deambulazione e la mobilità.

10
Modellistica e Simulazione dei Sistemi Meccanici
Esempi di sistemi multicorpo

11
Modellistica e Simulazione dei Sistemi Meccanici
Gough Testing machine Milling operation

12
Modellistica e Simulazione dei Sistemi Meccanici
Flexible multibody dynamics , Mechanisms dynamics , Launch Vehicle Dynamics , Deployable systems , Robotic systems , Control and mechatronics, Numerical and computational methods , Multibody Software development , Active and passive controls , Nonlinear dynamics and vibration , Multidisciplinary application

13
Modellistica e Simulazione dei Sistemi Meccanici
Automotive MB Consente di realizzare modelli e test virtuali

14
Modellistica e Simulazione dei Sistemi Meccanici
Stress in sospensione automobilistica

15
Modellistica e Simulazione dei Sistemi Meccanici
E’ possibile testare il comportamento di componenti hardware (ad es freni, sospensioni) all’interno di un sistema più complesso simulato via software: HIL (hardware in the loop)
 all’interno di un sistema più complesso simulato via software: HIL (hardware in the loop)")
16
Modellistica e Simulazione dei Sistemi Meccanici
Schema banco prova HIL

17
Modellistica e Simulazione dei Sistemi Meccanici
Banco prova ABS HIL

18
Modellistica e Simulazione dei Sistemi Meccanici
“AUTOVEICOLO….”

19
Modellistica e Simulazione dei Sistemi Meccanici
Oppure…. Un modello semplificato di veicolo è codificato nella centralina del dispositivo di controllo stabilità per stimare l’assetto del veicolo stesso

20
Modellistica e Simulazione dei Sistemi Meccanici

21
Modellistica e Simulazione dei Sistemi Meccanici

22
Modellistica e Simulazione dei Sistemi Meccanici
ABS ESP

23
Modellistica e Simulazione dei Sistemi Meccanici
Applicazioni non tradizionali Forensic mechanics (ricostruzione incidenti stradali)
")
24
Modellistica e Simulazione dei Sistemi Meccanici prof. V. Lorenzi
Coordinate Ufficio: II piano edificio B, uff Tel:035/ Orario di Ricevimento Lunedì , Mercoledì 15-17 Materiale didattico e comunicazioni

25
Modellistica e Simulazione dei Sistemi Meccanici

26
Modellistica e Simulazione dei Sistemi Meccanici
Testi di consultazione: A. Shabana, Dynamics of Multibody Systems, Wiley. G. Legnani, Robotica industriale, Casa Editrice Ambrosiana. G. Genta, Meccanica dell’autoveicolo, Levrotto & Bella, Torino, 2000 Esercitazioni Le esercitazioni consistono nella risoluzione numerica di problemi tramite Matlab e ADAMS. Modalità d’esame L’esame consiste in un colloquio orale

27
Modellistica e Simulazione dei Sistemi Meccanici
Orario: Lunedì in aula 11 informatica Venerdì aula 23 Modalità: Lezioni teoriche in aula e esercitazioni con Matlab e MSC.ADAMS in lab. Informatico Conoscenze richieste: Meccanica Razionale - Meccanica Applicata – Vibrazioni Meccaniche (?)
")
28
Modellistica e Simulazione dei Sistemi Meccanici
Cinematica del C.R. “Collegamenti” tra corpi Tipologia dei sistemi multibody Sistemi di coordinate, vincoli e gradi di libertà Classi di problemi Cenni sull’ integrazione tra FEM e multibody

29
Modellistica e Simulazione dei Sistemi Meccanici
Posizione di un corpo rigido

30
Modellistica e Simulazione dei Sistemi Meccanici
Cinematica del C.R “Collegamenti” tra corpi Tipologia dei sistemi multibody Sistemi di coordinate, vincoli e gradi di libertà Classi di problemi Cenni sull’ integrazione tra FEM e multibody

31
Giunti e gradi di libertà
I corpi sono collegati tra loro tramite giunti… I gradi di libertà corrispondono al numero di coordinate indipendenti che definiscono la posizione del sistema. Formula di Gruebler: dof=6*n_corpi-nv

32
Giunti e gradi di libertà
…si scambiano azioni tramite elementi elastici, viscosi… Alcuni vincoli legano tra loro solo le velocità (o le variazioni delle coordinate)
")
33
Modellistica e Simulazione dei Sistemi Meccanici
Cinematica del C.R “Collegamenti” tra corpi Tipologia dei sistemi multibody Sistemi di coordinate, vincoli e gradi di libertà Classi di problemi Cenni sull’ integrazione tra FEM e multibody

34
Tipologia di un sistema multicorpo
Un sistema multicorpo può essere a catena aperta – PUMA (Programmable Universal Machine for Assembly, or Programmable Universal Manipulation Arm) … o a catena chiusa
 … o a catena chiusa.")
35
Modellistica e Simulazione dei Sistemi Meccanici
Cinematica del C.R “Collegamenti” tra corpi Tipologia dei sistemi multibody Sistemi di coordinate, vincoli e gradi di libertà Classi di problemi Cenni sull’ integrazione tra FEM e multibody

36
Tipi di coordinate Per definire la posizione si puo’ usare un set di coordinate indipendenti o un set esteso di coordinate dipendenti legate da equazioni di vincolo Un programma “general purpose” utilizza il medesimo set: coordinate relative coordinate cartesiane coordinate naturali Un programma dedicato può utilizzare formulazioni miste

37
Modellistica dei Veicoli e dei Sistemi Meccatronici
Coordinate relative 3 coordinate, 1 gdl, perciò 2 equazioni di vincolo

38
Modellistica dei Veicoli e dei Sistemi Meccatronici
Coord. Cartesiane 9 coordinate, 1 gdl, perciò 8 equazioni di vincolo…

39
Coordinate relative in 3D
Molto usata la notazione di Denavit e Hartenberg, con matrici omogenee 4x4

40
Coordinate cartesiane in 3D
Nel caso 3D si usano le coordinate di un punto e l’orientamento. Per definire l’orientamento vengono usati gli angoli di Eulero, di Cardano (3 parametri indipendenti) o set di 4 coordinate dipendenti (parametri di Rodriguez-Hamilton, quaternioni, asse di rotazione finita)
 o set di 4 coordinate dipendenti (parametri di Rodriguez-Hamilton, quaternioni, asse di rotazione finita)")
41
Modellistica e Simulazione dei Sistemi Meccanici
Cinematica del C.R “Collegamenti” tra corpi Tipologia dei sistemi multibody Sistemi di coordinate, vincoli e gradi di libertà Classi di problemi Cenni sull’ integrazione tra FEM e multibody

42
Classi di problemi Analisi cinematica
Studio del movimento di un sistema multicorpo a prescindere dalle forze agenti: assemblaggio, posizione, velocità ed accelerazione Analisi dinamica Studio del movimento di un sistema multicorpo in relazione alle forze agenti Sintesi cinematica e dinamica Progetto di un sistema multicorpo che soddisfa “criteri” cinematici o dinamici

43
Modellazione Modellazione

44
Vincoli-carichi

45
Assemblaggio

46
Cinematica Analisi di posizione e simulazione cinematica
Consente di esaminare il posizionamento del meccanismo, individuare collisioni, determinare gli angoli di pressione etc.

47
Dinamica e Post-Processing

48
Modellistica e Simulazione dei Sistemi Meccanici
Cinematica del C.R “Collegamenti” tra corpi Tipologia dei sistemi multibody Sistemi di coordinate, vincoli e gradi di libertà Classi di problemi Cenni sull’ integrazione tra FEM e multibody

49
Modellistica e Simulazione dei Sistemi Meccanici
Elementi flessibili FEM MBS Stress

50
Modellistica e Simulazione dei Sistemi Meccanici
Programma in sintesi. Sistemi di riferimento, cambi di base e richiami sulle operazioni vettoriali. Orientamento di un corpo nello spazio, coordinate angolari. Velocità e accelerazione di un corpo rigido. Catena cinematica: coordinate indipendenti e dipendenti, relative (joint), cartesiane (body), naturali. Vincoli ed equazioni di vincolo. Cinematica di sistema multicorpo Dinamica del corpo rigido e di sistemi di corpi rigidi: equazioni di Lagrange e di Newton Eulero. Integrazione delle equazioni di moto. Sistemi con corpi flessibili Cosimulazione per sistema “meccatronico”
, cartesiane (body), naturali. Vincoli ed equazioni di vincolo. Cinematica di sistema multicorpo. Dinamica del corpo rigido e di sistemi di corpi rigidi: equazioni di Lagrange e di Newton Eulero. Integrazione delle equazioni di moto. Sistemi con corpi flessibili. Cosimulazione per sistema meccatronico")
51
Modellistica e Simulazione dei Sistemi Meccanici
A venerdì…. Prof. Vittorio Lorenzi

52
Modellistica e Simulazione dei Sistemi Meccanici
Ricerche in corso (dottorato di ricerca in Meccatronica) Banco prova HIL di sospensione motociclistica Modellazione di attuatori piezoelettrici
 Banco prova HIL di sospensione motociclistica. Modellazione di attuatori piezoelettrici.")
53
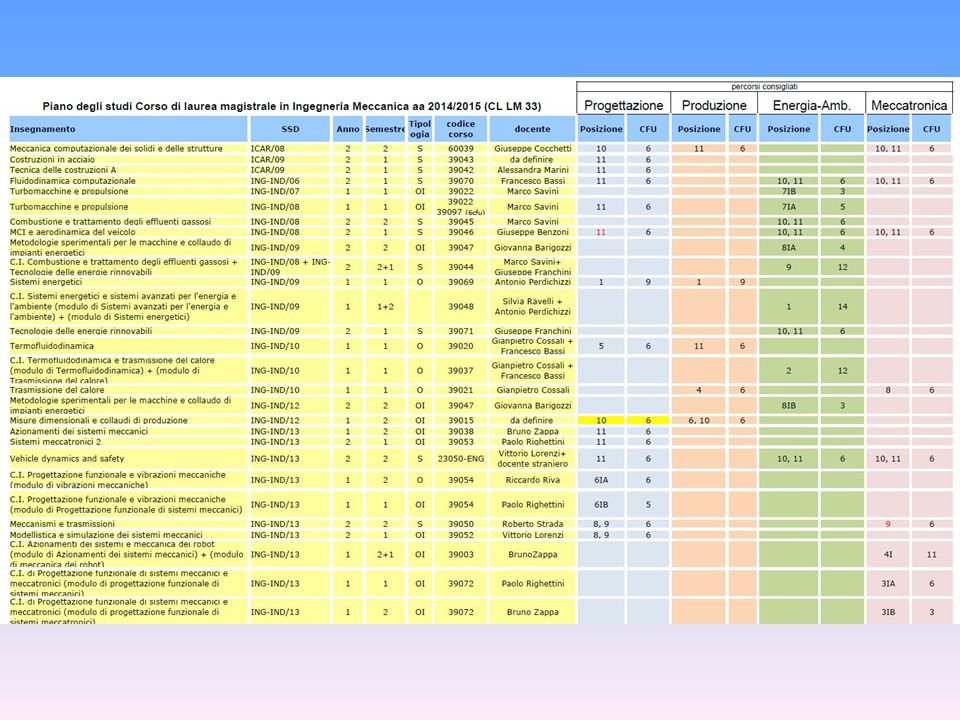
LM Ing. Meccanica

54
Modellistica e Simulazione dei Sistemi Meccanici

Presentazioni simili






 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")








 A.A. 99/00 B. Modulo di Robotica>")


 connessi in cascata tramite coppie cinematiche (giunti) a formare una catena cinematica.>")
