Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

2
Moto Curvilineo : Posizione, Velocità ed Accellerazione
Oggi Lunedi (2h) Moto rettilineo : posizione, velocità accellerazione Moto uniforme v=cost Moto uniformemente accelerato a=cost problema 1 problema 2 problema 3 Moto Curvilineo : Posizione, Velocità ed Accellerazione Derivate di Vettoridipendenti dal tempo Componenti Rettangolari della velocità ed Accellerazione Moto Relativo ad un sistema in traslazione Componenti Normali e Tangenziali Problema 4 Problema 5 rappresentazioni grafiche della cinematica del moto rettilineo + 1h di esercizi alla lavagna
 Moto rettilineo : posizione, velocità accellerazione. Moto uniforme v=cost. Moto uniformemente accelerato a=cost. problema 1. problema 2. problema 3. Moto Curvilineo : Posizione, Velocità ed Accellerazione. Derivate di Vettoridipendenti dal tempo. Componenti Rettangolari della velocità ed Accellerazione. Moto Relativo ad un sistema in traslazione. Componenti Normali e Tangenziali. Problema 4. Problema 5. rappresentazioni grafiche della cinematica del moto rettilineo. + 1h di esercizi alla lavagna.")
3
Cinematica: studio della geometria del moto
Cinematica: studio della geometria del moto. La cinematica viene utilizzata per collegare spostamento, velocità, accelerazione, e il tempo senza far riferimento alla causa del moto. Dinamica: studio delle relazioni esistenti tra le forze agenti su un corpo, la massa del corpo, e il moto del corpo. La dinamica è usata per predire il movimento causato dalla proposta forze o per determinare le forze necessarie per produrre un dato movimento. Moto rettilineo: posizione, velocità e accelerazione di una particella che si muove lungo una linea retta. Movimento curvilineo: posizione, velocità e accelerazione di una particella che si muove lungo una linea curva in due o tre dimensioni.

4
Movimento Rettilineo (1D) : posizione, velocità ed accelerazione
Una particella in movimento lungo una linea retta si dice che è in moto rettilineo. La coordinata x della posizione di una particella è definita dalla misura della sua distanza da un'origine fissa sulla linea. La coordinata x della posizione può essere sia positiva che negativa ed in un grafico x vs. t. Il moto di una particella è noto se la sua coordinata di posizione x(t) è nota ad ogni valore del tempo t. Il moto della particella può essere espresso nella forma di una funzione del tempo, ad esempio,
 è nota ad ogni valore del tempo t. Il moto della particella può essere espresso nella forma di una funzione del tempo, ad esempio,")
5
Velocità, moto rettilineo
x(t1+ t) pendenza Velocità media Velocità, moto rettilineo pendenza x(t1+ t) t pendenza x(t1+ t) t pendenza x(t1+ t) t x t x(t) pendenza velocità istantanea x(t1) Tangente alla curva in P(t1,x(t1)) ed in un grafico x vs. t. ed in un grafico x vs. t. t1
 pendenza. Velocità media. Velocità, moto rettilineo. pendenza. x(t1+ t) t. pendenza. x(t1+ t) t. pendenza. x(t1+ t) t. x. t. x(t) pendenza. velocità istantanea. x(t1) Tangente alla curva in P(t1,x(t1)) ed in un grafico x vs. t. ed in un grafico x vs. t. t1.")
6
Velocità media grafico x vs. t.

7
Velocità, moto rettilineo
Consideriamo una particella che occupa la posizione P al tempo t e successivamente si trova in P’ a t+Dt, Velocità Media Velocità istantanea Queste velocità possono essere positive o negative. Il loro modulo (cioè la radice quadrata del quadrato) è sempre positivo. (speed –velocity). Dalla definizione di derivata ad esempio
 è sempre positivo. (speed –velocity). Dalla definizione di derivata. ad esempio.")
8
Accellerazione Istantanea
Consideriamo una particella con velocità v al tempo t e v’ al tempo t+Dt, Accellerazione Istantanea Accellerazione Media L’accellerazione puo’ essere : Positiva se: aumenta una velocità positiva oppure diminuisce una V negativa Negativa se: diminuisce una v positiva Oppure aumenta una v negativa Dalla definizione di derivata

9
Spazio - tempo Velocità- tempo Accellerazione - tempo t = 0, x = 0, v = 0, a = 12 m/s2 t = 2 s, x = 16 m, v = vmax = 12 m/s, a = 0 t = 4 s, x = xmax = 32 m, v = 0, a = -12 m/s2 t = 6 s, x = 0, v = -36 m/s, a = 24 m/s2

10
Rappresentazione grafica della derivata temporale in cinematica
Data una equazione oraria x(t), la curva v(t) è uguale alla pendenza della x(t). Data la curva v(t) , la curva a(t) è uguale alla pendenza della v(t).
, la curva v(t) è uguale alla pendenza della x(t). Data la curva v(t) , la curva a(t) è uguale alla pendenza della v(t).")
11
Determinazione del moto di una particella
Ricordate, il moto di una particella è noto se la sua posizione X è nota ad ogni istante di tempo t. Tipicamente, le condizioni del moto sono specificate dal tipo di accellerazione a cui è soggetta la particella. Visto le relazioni tramite le derivate temporali tra a , v , e x, la determinazione della velocità e della posizione , nota l’accellerazione, richiede due successive operazioni di integrazione nel tempo Tre classi di moto possono essere definite a seconda che si conosca: accelerazione in funzione del tempo, a = a(t) - accelerazione in funzione del posizione, a = a(x) - accellerazione in funzione della velocità, a = a(v)
 - accelerazione in funzione del posizione, a = a(x) - accellerazione in funzione della velocità, a = a(v)")
12
Interpretrazione grafica degli integrali nel tempo
DERIVATE ED INTEGRALI !! Almeno delle funzioni elementari dovete impararli a fare …SUBITO!!! Data la curva a(t), la variazione in velocità tra t1 e t2 è uguale all’area sottesa dalla curva a(t) tra t1 e t2. Data la curva v(t), la variazione in posizione tra t1 e t2 è uguale all’area sottesa dalla curva v(t) tra t1 e t2.
, la variazione in velocità tra t1 e t2 è uguale all’area sottesa dalla curva a(t) tra t1 e t2. Data la curva v(t), la variazione in posizione tra t1 e t2 è uguale all’area sottesa dalla curva v(t) tra t1 e t2.")
13
accellerazione in funzione del tempo, a = a(t)
- accellerazione in funzione della posizione, a = a(x)
")
14
accellerazione in funzione della velocità, a = a(v):
:")
15
Accellerazione nulla, velocità costante a=0, v=cost.
MOTO UNIFORME

16
Accellerazione costante, a=cost. MOTO UNIFORMEMENTE ACCELLERATO

17
accellerazione in funzione della velocità, a = f(v) ; a=cost
Se a è costante nel tempo vuol dire che è costante anche al variare della velocità !!

18
accellerazione in funzione della posizione, a = cost
Otteniamo lo stesso risultato

19
Problema Il moto della palla è un moto uniformemente accellerato, con accellerazione g=-9.81 m/s2 diretta verso il suolo. Cerchiamo il tempo t al quale la velocità è uguale a zero (tempo al quale viene raggiunta la massima altezza) e utilizziamolo per valutare la corrispondente altezza massima Una p.m. (palla) è lanciata con velocità verticale vo= 10 m/s da una finestra posta ad altezza yo = 20 m dal suolo. Determinare: velocità ed altezza rispetto al suolo al tempo t, La massima altezza raggiunta ed il tempo impiegato Il tempo di arrivo al suolo e la corrispondente velocità finale. Cerchiamo il tempo t al quale l’altezza rispetto al suolo è uguale a zero (tempo d’impatto) e utilizziamolo per calcolare la velocità al momento dell’impatto
 e utilizziamolo per valutare la corrispondente altezza massima. Una p.m. (palla) è lanciata con velocità verticale vo= 10 m/s da una finestra posta ad altezza yo = 20 m dal suolo. Determinare: velocità ed altezza rispetto al suolo al tempo t, La massima altezza raggiunta ed il tempo impiegato. Il tempo di arrivo al suolo e la corrispondente velocità finale. Cerchiamo il tempo t al quale l’altezza rispetto al suolo è uguale a zero (tempo d’impatto) e utilizziamolo per calcolare la velocità al momento dell’impatto.")
20
Integriamo, per trovare v(t) ed ancora una volta per trovare y(t).
 ed ancora una volta per trovare y(t).")
21
Troviamo t tale che, v=0 … la corrispondente altezza ymax

22
velocità al momento dell’impatto
Calcolare il tempo t tale che y(t)=0 Calcolare la corrispondente velocita velocità al momento dell’impatto
=0. Calcolare la corrispondente velocita. velocità al momento dell’impatto.")
23
Integrare a = v dv/dx = -kv
accellerazione in funzione della velocità, a = f(v) ; a=cost Alla stazione ferroviaria un “freno terminale” dei binari dei treni consiste di un pistone attaccato ad un asse, libero dimuoversi di moto rettilineo all’interno di un cilindro pieno di olio. All’urto con la locomotrice in arrivo, l’asse viene spinto verso l’interno del cilindro con velocità iniziale v0, il pistone a sua volta, muovendosi con la stessa velocità, comprime l’olio che può passare ma con difficoltà verso sinistra, attraverso dei sottili fori nel pistone consentendo l’avanzamento del cilindro ma causando una decellerazione proporzionale alla velocità Determinare v(t), x(t), e v(x). Integrare a = dv/dt = -kv per trovare v(t). Integrare v(t) = dx/dt per trovare x(t). Integrare a = v dv/dx = -kv per trovare v(x).
 ; a=cost. Alla stazione ferroviaria un freno terminale dei binari dei treni consiste di un pistone attaccato ad un asse, libero dimuoversi di moto rettilineo all’interno di un cilindro pieno di olio. All’urto con la locomotrice in arrivo, l’asse viene spinto verso l’interno del cilindro con velocità iniziale v0, il pistone a sua volta, muovendosi con la stessa velocità, comprime l’olio che può passare ma con difficoltà verso sinistra, attraverso dei sottili fori nel pistone consentendo l’avanzamento del cilindro ma causando una decellerazione proporzionale alla velocità. Determinare v(t), x(t), e v(x). Integrare a = dv/dt = -kv per trovare v(t). Integrare v(t) = dx/dt per trovare x(t). Integrare a = v dv/dx = -kv. per trovare v(x).")
24
SOLUZIONE: Integrare a = dv/dt = -kv per trovare v(t). Integrare v(t) = dx/dt per trovare x(t).
 = dx/dt per trovare x(t).")
25
Integrare a = v dv/dx = -kv
per trovare v(x). Alternativamente, con e Infine:
. Alternativamente, con. e. Infine:")
26
Moto rettilineo uniforme
v=costante a=0

27
Moto uniformemente accellerato
Un aparticella in moto rettilineo uniformemente accellerato a=costante

28
Moti di piu’ parti: moto relativo
Consideriamo due punti materiali, A e B, che si muovono di moto rettilineo lungo la stessa linea. Il tempo deve essere registrato a partire da uno stesso istante iniziale e gli spostamenti dovrebbero essere misurati dalla stessa origine usando la stessa direzione orientata per indicare il verso positivo posizione relativa di B rispetto ad A velocità relativa di B rispetto ad A accellerazione di B rispetto ad A

29
Problema SOLUZIONE: Per la palla: Sostituire la posizione x0 e la velocità v0 iniziali e l’accellerazione costante g=-9.81 m/s2 nelle equazioni generali per il moto uniformemente accellerato . Per la piattaforma : Sostituire la posizione x0 e la velocità v0 costante iniziale della pioattaforma nelle equazioni generali per il moto uniforme. Un palla è lanciata da yo=12m di altezza, con vo= 18 m/s verso l’alto, lungo il condotto di una piattaforma-ascensore. In quello stesso istante, la piattaforma si trova a 5 m di altezza dal suolo e si muove vero su con vE= 2 m/s. Determinare (a) quando e dove la palla colpisce la piattaforma e (b) la velocità relativa della palla ed elevatore al contatto Scrivere l’equazione per la posizione relativa della palla rispetto alla piattaforma e risolvere imponendo che la posizione relativa sia nulla, cioe la posizione verticale alla quale avviene l’impatto, tempo impatto tf Sostituite il tempo di impatto nelle equazioni per la posizione della piataforma e la relativa velocità della palla al momento dell’impatto
 quando e dove la palla colpisce la piattaforma e (b) la velocità relativa della palla ed elevatore al contatto. Scrivere l’equazione per la posizione relativa della palla rispetto alla piattaforma e risolvere imponendo che la posizione relativa sia nulla, cioe la posizione verticale alla quale avviene l’impatto, tempo impatto tf. Sostituite il tempo di impatto nelle equazioni per la posizione della piataforma e la relativa velocità della palla al momento dell’impatto.")
30
SOLUZIONE: Sostituire la posizione x0 e la velocità v0 iniziali e l’accellerazione costante g=-9.81 m/s2 nelle equazioni generali per il moto uniformemente accellerato . Sostituire la posizione x0 e la velocità v0 costante iniziale della pioattaforma nelle equazioni generali per il moto uniforme.

31
Scrivere l’equazione per la posizione relativa della palla rispetto alla piattaforma e risolvere imponendo che la posizione relativa sia nulla, cioe la posizione verticale alla quale avviene l’impatto, tempo impatto tf Sostituite il tempo di impatto nelle equazioni per la posizione della piataforma e la relativa velocità della palla al momento dell’impatto

32
La derivata temporale in grafici
Data una equazione oraria x(t), la curva v(t) è uguale alla pendenza della x(t). Data la curva v(t) , la curva a(t) è uguale alla pendenza della v(t).
, la curva v(t) è uguale alla pendenza della x(t). Data la curva v(t) , la curva a(t) è uguale alla pendenza della v(t).")
33
lettura grafica degli integrali nel tempo
Data la curva a(t), la variazione in velocità tra t1 e t2 è uguale all’area sottesa dalla curva a(t) tra t1 e t2. Data la curva v(t), la variazione in posizione tra t1 e t2 è uguale all’area sottesa dalla curva v(t) tra t1 e t2.
, la variazione in velocità tra t1 e t2 è uguale all’area sottesa dalla curva a(t) tra t1 e t2. Data la curva v(t), la variazione in posizione tra t1 e t2 è uguale all’area sottesa dalla curva v(t) tra t1 e t2.")
34
Sistemi di più punti materiali : Moto Reletivo
Particelle (punti materiali, p.m.) che si muovono lungo la stessa linea. Dopo aver definito un sistema di riferimento comune con la stessa origine e direzione per gli spostamenti e lo stesso istante di tempo iniziale, possiamo scrivere Posizione relativa di B rispetto ad A Velocità relativa di B rispetto ad A Accellerazione relativa di B rispetto ad A
 che si muovono lungo la stessa linea. Dopo aver definito un sistema di riferimento comune con la stessa origine e direzione per gli spostamenti e lo stesso istante di tempo iniziale, possiamo scrivere. Posizione relativa di B rispetto ad A. Velocità relativa di B rispetto ad A. Accellerazione relativa di B rispetto ad A.")
35
Sistemi di più punti materiali (o di piu’ parti)
La posizione di un p.m. può dipendere dalla posizione degli altri p.m Ad esempio la posizione del blocco B dipende dalla posizione di A. Poichè la fune ha lunghezza costante ne segue che deve essere costante la somma dei segmenti const (1 grado di libertà) la posizione dei tre bocchi è dipendente const (2 gradi di libertà) Relazioni simili valgono per le velocità e le accellerazioni
 la posizione dei tre bocchi è dipendente. const (2 gradi di libertà) Relazioni simili valgono per le velocità e le accellerazioni.")
36
Problema 5 Definire l’origine alla superficie orizzontale superiore con direzione positiva per gli spostamenti verso il basso. A ha un moto rettilineo uniformemente accellerato. Usiamolo per trovare l’accellerazione ed il tempo t* per raggiungere L. D ha un moto rettilineo uniforme; calcoliamo il cambiamento di posizione al tempo t* La puleggia D che può scorrere verticalmente lungo l’asse viene messa in movimento verso il basso con vD =3m/s a t = 0. Conseguentemente il manicotto A inizia a muoversi dalla posizione K con accellerazione costante e zero velocità iniziale. Sappiamo inoltre che la velocità di A è 12 m/s non appena passa L. Determinare il cambiamento in altezza, velocità ed accellerazione del blocco B quando A è alla posizione L. Il moto di B dipende dai moti di A e di D. Scrivere le relazioni di moto relativo per trovare lo spostamento di B al tempo t*. Diffrenziatele per trovare velocità ed accellerazione di B

37
Definire l’origine alla superficie orizzontale superiore con direzione positiva per gli spostamenti verso il basso. 8m 12m/s A ha un moto rettilineo unif. acc. Possiamo ricavare l’accellerazione ed il tempo t* per rraggiungere L.

38
Total length of cable remains constant,
La puleggia D ha un moto rettilineo uniforme, calcoliamo il cambiamento di posizione al tempo t* Block B motion is dependent on motions of collar A and pulley D. Write motion relationship and solve for change of block B position at time t. Total length of cable remains constant, 3m/s

39
Diffrenziate 2 volte per trovare rispettivamente velocità ed accellerazione di B
.

40
Moto curvilineo: posizione
Un p.m. che non si muove in linea retta si dice che si muove di moto curvilineo Il vettore posizione del p.m al tempo t è definito come il vettore tra l’origine O di un sistema fisso di riferimento e la posizione occupata dal p.m al tempo t+t il p.m. si sposta nella posizione P’, percorrendo l’arco di curva s. s=spazio percorso Sia il vettore posizione del p.m. in P’ Il vettore spostamento è definito come:

41
Moto curvilineo: velocità
Un p.m. che non si muove in linea retta si dice che si muove di moto curvilineo Il vettore posizione del p.m. al tempo t è definito come il vettore tra l’origine O di un sistema fisso di riferimento e la posizione occupata dal p.m Definiamo la velocità media (vettore) del p.m. che occupa la posizione P al tempo t e P’ a t + Dt, Velocità istantanea (vettore) Velocità istantanea (scalare)
 del p.m. che occupa la posizione P al tempo t e P’ a t + Dt, Velocità istantanea (vettore) Velocità istantanea (scalare)")
42
Moto curvilineo: accellerazione
accellerazione Istantanea (vettore) Consideriamo la velocità di un p.m al tempo t e la sua velocità a t + Dt : In generale, il vettore accelerazione non è tangente al percorso della particella e quindi non è parallelo al vettore velocità.
 Consideriamo la velocità di un p.m. al tempo t e la sua velocità a t + Dt : In generale, il vettore accelerazione non è tangente al percorso della particella e quindi non è parallelo al vettore velocità.")
43
Derivate di funzioni vettoriali
sono vettori e funzioni della variabile continua u Derivata della somma di due vettori Derivata del prodotto con uno scalare f Derivata del prodotto scalare La derivata è tangente alla curva !

44
Componenti lungo gli assi cartesiani
La posizione P di un p.m. in un riferimento cartesiano è data da: Vettore velocità , Vettore accellerazione

45
Esempio 2D il moto si puo’ scomporre in tre moti indipendenti sugli assi cartesiani (mi sapete dire quando non è possibile?) Con condizioni iniziali Integrando due volte Il moto del p.m. può essere scomposto in due moti rettilinei indipendenti Il moto nella direzione orizzontale x è uniforme Il moto nella direzione verticale y è uniformemente accellerato

46
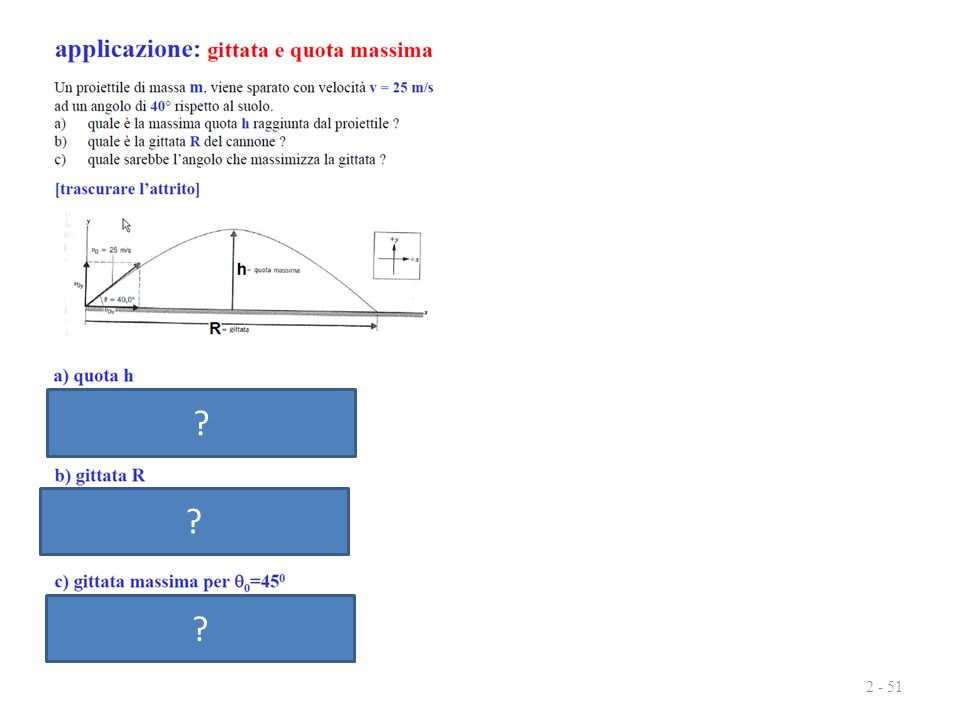
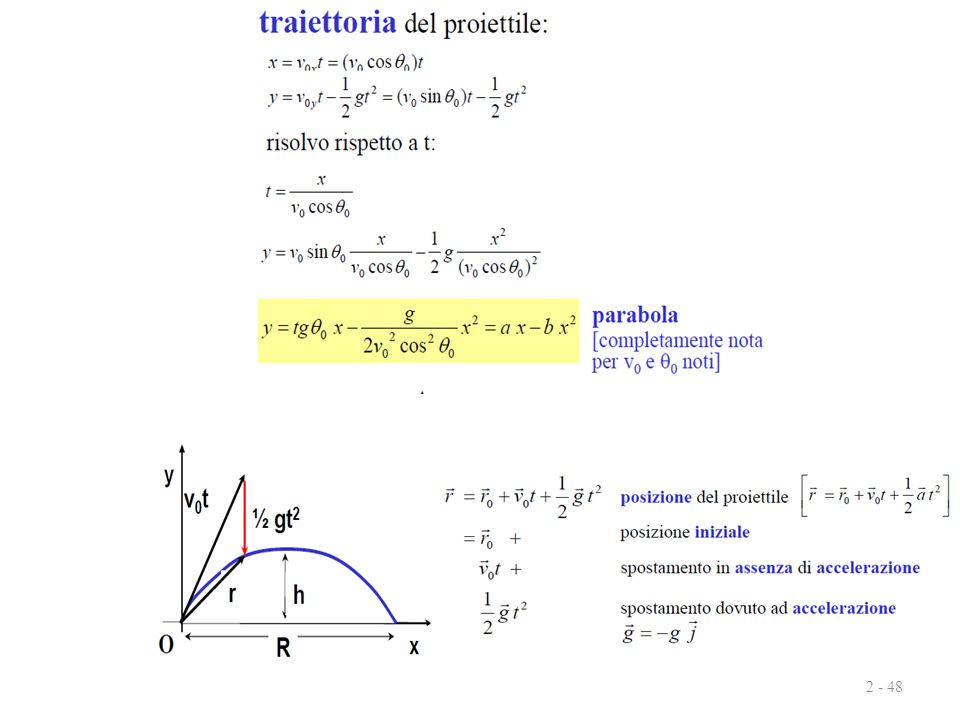
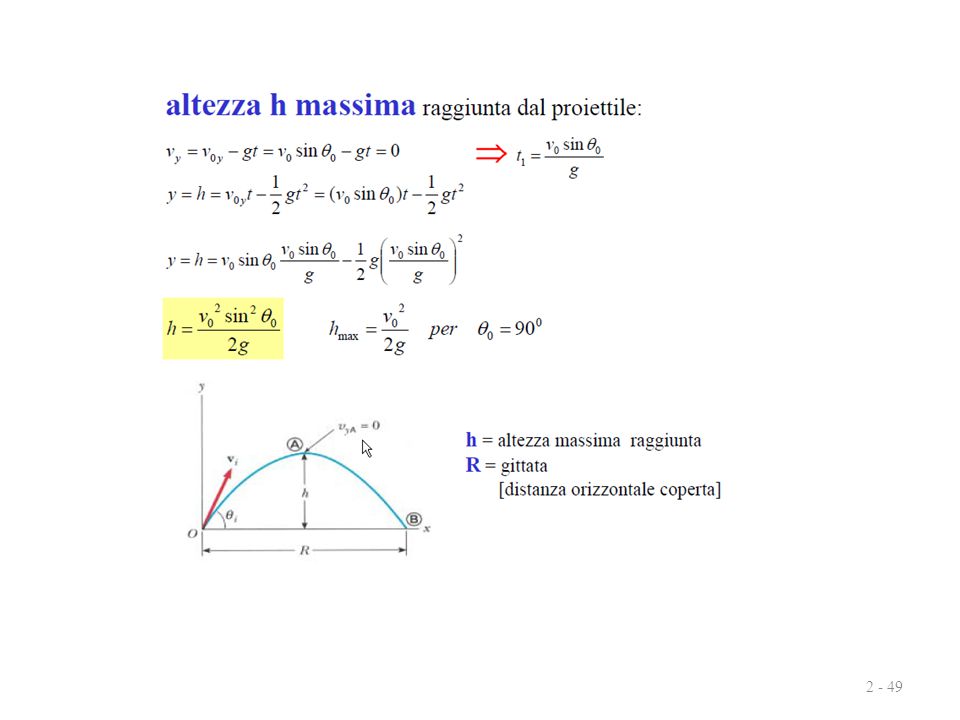
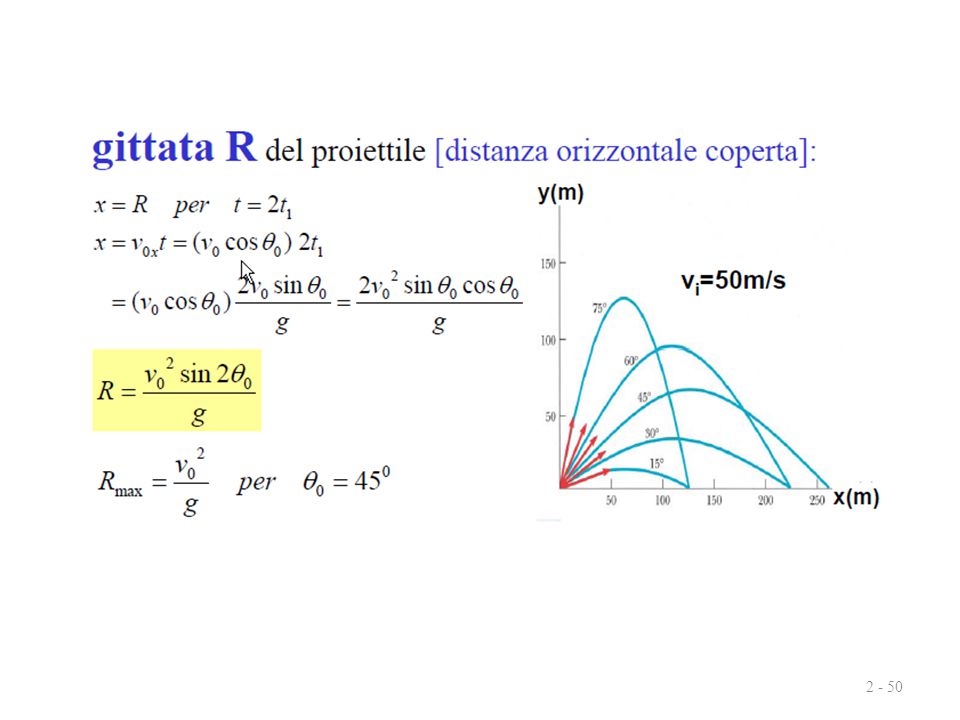
Applicazione:moto del proiettile [qualunque oggetto lanciato in aria]
Ipotesi: accelerazione di gravità g costante resistenza dell’aria trascurabile Il moto orizzontale e verticale sono indipendenti applico le equazioni della cinematica monodimensionale: moto rettilineo orizzontale (x): uniforme moto rettilineo verticale (y) : uniformenmente accellerato (caduta di un grave) la traiettoria è sempre una parabola [dimostrare] z x y
![Applicazione:moto del proiettile [qualunque oggetto lanciato in aria]](http://slideplayer.it/slide/3674539/12/images/46/Applicazione%3Amoto+del+proiettile+%5Bqualunque+oggetto+lanciato+in+aria%5D.jpg "Ipotesi: accelerazione di gravità g costante. resistenza dell’aria trascurabile. Il moto orizzontale e verticale sono indipendenti. applico le equazioni della cinematica monodimensionale: moto rettilineo orizzontale (x): uniforme. moto rettilineo verticale (y) : uniformenmente accellerato (caduta di un grave) la traiettoria è sempre una parabola [dimostrare] z. x. y.")
47
Applicazione:moto del proiettile

51
? ? ?
52
Luce stroboscopica : flash ad intervalli uguali t

53
Moto relativo ad un sistema di riferimento in movimento relativo uniforme
Consideriamo un sistema fisso di riferimento O(xyz) ed uno mobile A(x’y’z’) che al più trasla rispetto al prima con velocità costante . I vettori posizione per i p.m. A e B rispetto al sistema fisso Oxyz sono : Il vettore che unisce A e B definisce la posizione di B rispetto al sistema di riferimento mobile Ax’y’z’. Risulta: Si ottiene: Velocità di B rispetto ad A. Accellerazione di B rispetto ad A. Il moto “assoluto di B può essere ricavato combinando il moto di A con il moto relativo di B rispetto al sistema di riferimento mobile attaccato ad A.
 ed uno mobile A(x’y’z’) che al più trasla rispetto al prima con velocità costante . I vettori posizione per i p.m. A e B rispetto al sistema fisso Oxyz sono : Il vettore che unisce A e B definisce la posizione di B rispetto al sistema di riferimento mobile Ax’y’z’. Risulta: Si ottiene: Velocità di B rispetto ad A. Accellerazione di B rispetto ad A. Il moto assoluto di B può essere ricavato combinando il moto di A con il moto relativo di B rispetto al sistema di riferimento mobile attaccato ad A.")
54
Componenti tangenziale e normale
La velocità è un vettore sempre tangente alla traettoria del p.m. In genere, l’accellerazione non lo è ! E’ conveniente esprimere il vettore accellerazione in termini di componenti tangenziali e normali (ortogonali alla direzione del moto cioe’ alla tangente) Siano i versori tangenti alla traettoria in P e P’. Riportiamoli sull’origine e chimiamo l’angolo tra di loro traettoria Non fate confusione, questa non è la taettoria /2
 Siano i versori tangenti alla traettoria in P e P’. Riportiamoli sull’origine e chimiamo l’angolo tra di loro. traettoria. Non fate confusione, questa non è la taettoria. /2.")
55
s Ad esempio: Circonferenza cerchio di raggio ? + =

56
Componenti tangenziale e normale dell’accellerazione
Esprimendo la velocità come : l’accellerazione della p.m. può essere scritta come : ma La componente tangenziale dell’accellerazione riflette il cambio di intensità della velocità (velocità scalare) mente la componente normale riflette il cambio di direzione del moto. La componente tangenziale può essere positiva o negativa. La componente normale punta sempre verso il centro della curvatura. ma Sostituendo
 mente la componente normale riflette il cambio di direzione del moto. La componente tangenziale può essere positiva o negativa. La componente normale punta sempre verso il centro della curvatura. ma. Sostituendo.")
57
Problema Calcolare le componenti tangenziali e normali dell’accellerazione. 250 m vA=60 Km/h Determinare il modulo dell’accellerazione e la direzione rispetto alla tangente alla curva. Una automobile compie una curva a 60 km/h. Il guidatore frena causando una decellerazione uniforme Sapendo che dopo t = 8 s la velocità è stata ridotta a v2=45 Km/h, determinare l’accellerazione un attimo prima di frenare

58
Problema Calcolate le comp. tangenziale e normale dell’accellerazione di una p.m. 0.5 m/s2 1.1 m/s2 Determinare il modulo dell’accellerazione e la direzione rispetto alla tangente alla curva.

59
Problema Valutare t* per q = 30o.
Calcolare la posirione radiale (r) ed angolare (q), e le due derivate, prima (velocità) e seconda (accellerazine), rispetto al tempo a t=t*. Il braccio meccanico ruota attorno al punto fisso O con legge orararia q = 0.15t2 dove q è in radianti e t in secondi. Il collare B scorre lungo il braccio secondo la seguente legge orarria r = t2 dove r è espresso in metri. Dopo che il braccio ha ruotato di 30° , determinare (a) la velocità totale del collare, (b) l’accellerazione totale del collare (c) l’accellerazione relativa del collare rispetto al braccio. Calcolare la velocità ed accellerazione in coordinate cilindriche Calcolare l’accellerazione del collare rispetto al braccio
 ed angolare (q), e le due derivate, prima (velocità) e seconda (accellerazine), rispetto al tempo a t=t*. Il braccio meccanico ruota attorno al punto fisso O con legge orararia q = 0.15t2 dove q è in radianti e t in secondi. Il collare B scorre lungo il braccio secondo la seguente legge orarria r = t2 dove r è espresso in metri. Dopo che il braccio ha ruotato di 30° , determinare (a) la velocità totale del collare, (b) l’accellerazione totale del collare (c) l’accellerazione relativa del collare rispetto al braccio. Calcolare la velocità ed accellerazione in coordinate cilindriche. Calcolare l’accellerazione del collare rispetto al braccio.")
60
Valutare t* per q = 30o. Calcolare la posirione radiale (r) ed angolare (q), e le due derivate, prima (velocità) e seconda (accellerazi0ne), rispetto al tempo a t=t*.
 ed angolare (q), e le due derivate, prima (velocità) e seconda (accellerazi0ne), rispetto al tempo a t=t*.")
61
Calcolo per velocità ed accelerazione.

62
Calcolare l’accellerazione del collare rispetto al braccio

Presentazioni simili








 che determinano le variazioni dello stato di moto.>")

>")








