Scaricare la presentazione
1
Controllo ottimo delle superfici di commutazione nei sistemi ibridi autonomi Mauro Boccadoro *, Magnus Egerstedt y e Yorai Wardi y *DIEI - Università di Perugia y ECE - Georgia Institute of Technology, Atlanta (GA) USA
 USA")
2
Sommario 1.Controllo ottimo di sistemi ibridi 2.Controllo tramite superfici di commutazione parametrizzate 3.Aspetti implementativi 4.Applicazioni 5.Conclusioni

3
Sistemi ibridi Dinamica: Siano t i, x i gli istanti e gli stati di commutazione

4
Controllo ottimo di sistemi ibridi Caso f i =f i (x) s=s(i,t) controllo in ciclo aperto s=s(i,x) controllo in feedback Dinamica: Funzione costo: Problema: trovare ingressi continui u(.), sequenza e istanti di commutazione che minimizzino J
 s=s(i,t) controllo in ciclo aperto s=s(i,x) controllo in feedback Dinamica: Funzione costo: Problema: trovare ingressi continui u(.), sequenza e istanti di commutazione che minimizzino J")
5
tramite la “progettazione” di superfici di commutazione parametrizzate, i.e., Superfici di commutazione ottime Controllo ottimo di un sistema ibrido autonomo Trovare i valori dei parametri a i che minimizzano J

6
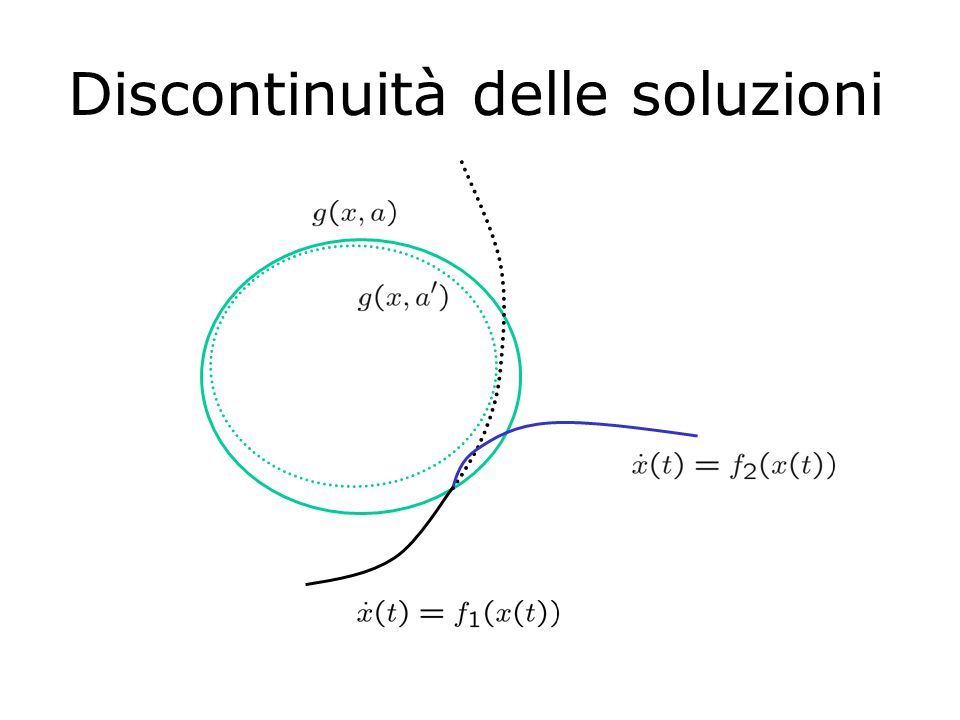
L(x) differenziabile modi f i Lipschitz in R n g i differenziabili, con #h parametri Raggiungimento delle superfici di commutazione in maniera trasversale (implica “continuità” delle esecuzioni del sistema), i.e., detti t i e x i gli i-esimi istanti di commutazione e corrispettivi stati dove Ipotesi
 differenziabile modi f i Lipschitz in R n g i differenziabili, con #h parametri Raggiungimento delle superfici di commutazione in maniera trasversale (implica continuità delle esecuzioni del sistema), i.e., detti t i e x i gli i-esimi istanti di commutazione e corrispettivi stati dove Ipotesi")
7
Dinamica variazionale dei sistemi ibridi

8
La dinamica variazionale di sistemi “ordinari” è data da dove sta per la matrice di transizione di stato del sistema linearizzato Dinamica variazionale dei sistemi ibridi (2) Per sistemi ibridi con commutazioni dipendenti dallo stato con superfici parametrizzate, dove Dinamica autonoma Termini forzanti
 Per sistemi ibridi con commutazioni dipendenti dallo stato con superfici parametrizzate, dove Dinamica autonoma Termini forzanti")
9
Approccio alla soluzione 1) Calcolare il gradiente dJ/da, a={a 1,a 2,…}
 Calcolare il gradiente dJ/da, a={a 1,a 2,…}")
10
Approccio alla soluzione (2) 2)Applicare algoritmi numerici a discesa del gradiente (soluzioni ottime locali) Complessità del calcolo del gradiente: Sono necessarie due integrazioni: una in avanti per i termini R k e L k T, una all'indietro per p(t k + ) Si noti che le traiettorie devono continuare ad essere trasversali durante l’ottimizzazione: ciò implica continuità delle esecuzioni (quindi, continuità di J in a) applicabilità dei metodi a discesa del gradiente
 2)Applicare algoritmi numerici a discesa del gradiente (soluzioni ottime locali) Complessità del calcolo del gradiente: Sono necessarie due integrazioni: una in avanti per i termini R k e L k T, una all indietro per p(t k + ) Si noti che le traiettorie devono continuare ad essere trasversali durante l’ottimizzazione: ciò implica continuità delle esecuzioni (quindi, continuità di J in a) applicabilità dei metodi a discesa del gradiente")
11
1.Controllo ottimo di sistemi ibridi 2.Controllo tramite superfici di commutazione parametrizzate 3.Aspetti implementativi 4.Applicazioni 5.Conclusioni

12
Continuità delle soluzioni

13
Discontinuità delle soluzioni

15
Algoritmo di Armijo Consente di trovare il passo ottimale nella discesa del gradiente tramite un controllo della funzione obiettivo J J continua J discontinua Possibilità di estendere l’algoritmo per l’ottimizzazione di funzioni discontinue

16
Sommario 1.Controllo ottimo di sistemi ibridi 2.Controllo tramite superfici di commutazione parametrizzate 3.Aspetti implementativi 4.Applicazioni 5.Conclusioni

17
Applicazione (1): Stabilizzazione
: Stabilizzazione")
18
Stabilizzazione tramite ottimizzazione delle superfici di commutazione

19
Intro: paradigma “reattivo” e “deliberativo” nella robotica mobile –Paradigma reattivo: il robot commuta tra differenti comportamenti quando vengono percepiti variazioni ambientali progettazione modulare (modi di comportamento concepiti per compiti specifici) –Paradigma deliberativo: possono essere elaborati cammini ottimali alta complessità computazionale Applicazione (2): distanze di sicurezza per robot mobili
 –Paradigma deliberativo: possono essere elaborati cammini ottimali alta complessità computazionale Applicazione (2): distanze di sicurezza per robot mobili")
20
Dato un set di comportamenti, progettare le leggi di commutazione ottime e.g., missione di raggiungere una destinazione evitando un ostacolo Dati i comportamenti: vai-a-destinazione e fuggi- dall’ostacolo, identificare le superfici di commutazione ottime attorno all’ostacolo Ottimalità per sistemi di navigazione reattivi Nei lavori correlati: viene stabilita una distanza di sicurezza dall’ostacolo Qual’è il suo ottimo? La forma circolare di tale superficie di commutazione è ottima?

21
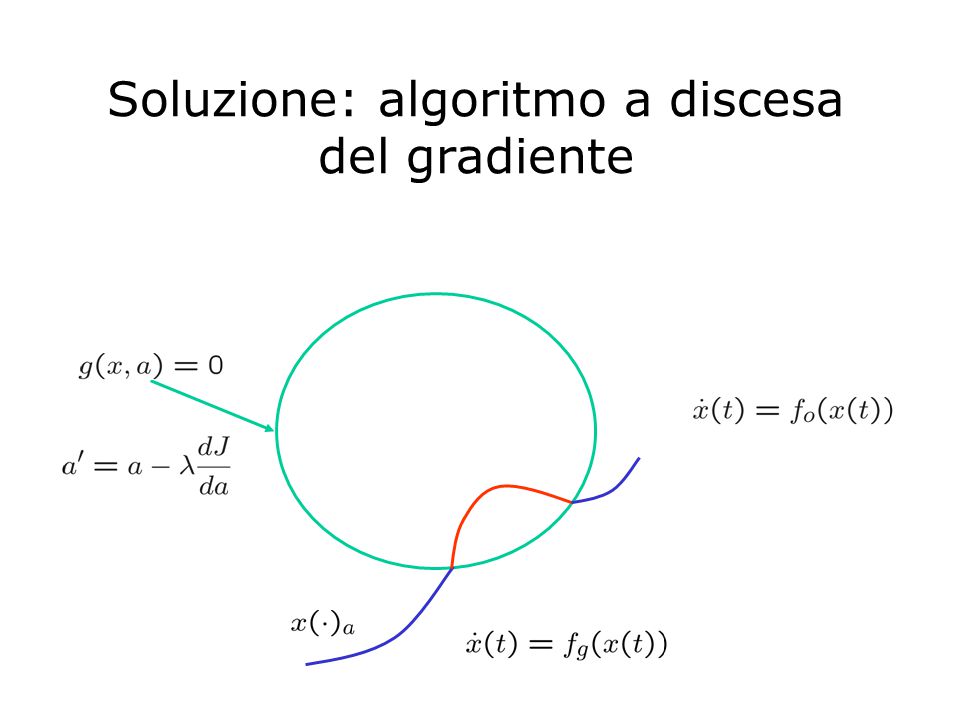
dinamica modi costo Due superfici di commutazione circolari centrate nell’ostacolo xgxg xoxo x0x0 Ottimalità per sistemi di navigazione reattivi

22
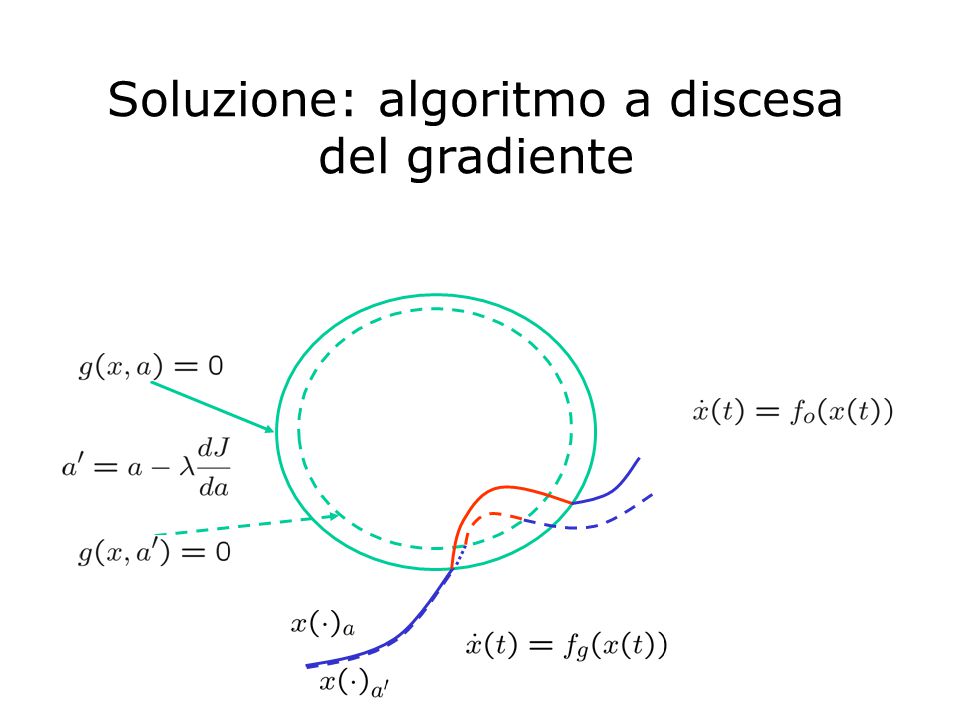
Soluzione: algoritmo a discesa del gradiente

25
Risultati (1) Le due superfici tendono a collassare, per diverse scelte dei parametri del sistema Utilizzare una singola superficie di commutazione
 Le due superfici tendono a collassare, per diverse scelte dei parametri del sistema Utilizzare una singola superficie di commutazione")
26
Ottimizzazione per una singola superficie di commutazione distanza di sicurezza Scelta di superfici non circolari, e.g. ellittiche risultano degli ottimi locali migliori degli ottimi globali per superfici circolari Risultati (2)
.")
27
Conclusioni Controllo ottimo dei sistemi ibridi autonomi tramite superfici di commutazione parametrizzate –Stabilizzazione –Applicazione alla robotica mobile –Per lo studio delle politiche ottime di sistemi manifatturieri ? (dinamiche ibride, superfici di commutazione correlate ai livelli delle scorte...) Problemi aperti –Discontinuità delle traiettorie –Algoritmi di ottimizzazione per funzioni discontinue –Dipendenza dalle condizioni iniziali
 Problemi aperti –Discontinuità delle traiettorie –Algoritmi di ottimizzazione per funzioni discontinue –Dipendenza dalle condizioni iniziali.")














 connessi in cascata tramite coppie cinematiche (giunti) a formare una catena cinematica.>")

 Problemi e algoritmi Anno Accademico 2009/2010.>")



