Scaricare la presentazione
1
Spazio dei giunti e spazio operativo
Lo spazio dei giunti (o spazio delle configurazioni) è lo spazio in cui è definito il vettore q delle variabili di giunto. La sua dimensione è indicata con N. Lo Spazio operativo (o spazio Cartesiano) è lo spazio in cui è definito il vettore x = (p, )T. La sua dimensione è indicata con M. p è il vettore delle coordinate cartesiane della posizione dell’organo terminale. In generale ha dimensione 3x1 (coordinate x,y,z). è il vettore rappresentante l’orientamento dell’organo terminale. In generale ha dimensione 3x1. Le dimensioni effettive dei vettori p e dipendono dallo spazio di lavoro e dal compito che il robot deve eseguire.
 è lo spazio in cui è definito il vettore q delle variabili di giunto. La sua dimensione è indicata con N. Lo Spazio operativo (o spazio Cartesiano) è lo spazio in cui è definito il vettore x = (p, )T. La sua dimensione è indicata con M. p è il vettore delle coordinate cartesiane della posizione dell’organo terminale. In generale ha dimensione 3x1 (coordinate x,y,z). è il vettore rappresentante l’orientamento dell’organo terminale. In generale ha dimensione 3x1. Le dimensioni effettive dei vettori p e dipendono dallo spazio di lavoro e dal compito che il robot deve eseguire.")
2
Il problema cinematico inverso
Il problema cinematico inverso riguarda la determinazione delle variabili di giunto una volta assegnati posizione e orientamento dell’organo terminale.

3
Il problema cinematico inverso
Le equazioni da risolvere sono in generale non lineari Non è sempre possibile trovare una soluzione analitica (in forma chiusa) Si possono avere soluzioni multiple. Si possono avere infinite soluzioni (manipolatori ridondanti). In funzione della struttura cinematica del braccio, possono non esistere soluzioni ammissibili. L’esistenza di una soluzione è sempre garantita se la posizione e l’orientamento desiderati appartengono allo spazio di lavoro destro del manipolatore. Il problema delle soluzioni multiple è legato non solo al numero di gradi di libertà ma anche al numero di parametri di D-H nulli.
 Si possono avere soluzioni multiple. Si possono avere infinite soluzioni (manipolatori ridondanti). In funzione della struttura cinematica del braccio, possono non esistere soluzioni ammissibili. L’esistenza di una soluzione è sempre garantita se la posizione e l’orientamento desiderati appartengono allo spazio di lavoro destro del manipolatore. Il problema delle soluzioni multiple è legato non solo al numero di gradi di libertà ma anche al numero di parametri di D-H nulli.")
4
Il problema cinematico inverso
Nei casi in cui non sia facile o non esistano soluzioni analitiche si ricorre a tecniche numeriche di soluzione Nel caso di manipolatore a sei gradi di libertà l’esistenza di una soluzione analitica è sempre garantita se ricorre almeno una delle seguenti condizioni: A) tre assi di giunti rotoidali adiacenti si intersecano (polso sferico); B) tre assi di giunti rotoidali adiacenti sono paralleli Nel caso A, si può scindere il problema in due sottoproblemi disaccoppiando la soluzione per la posizione da quella per l’orientamento.
 tre assi di giunti rotoidali adiacenti si intersecano (polso sferico); B) tre assi di giunti rotoidali adiacenti sono paralleli. Nel caso A, si può scindere il problema in due sottoproblemi disaccoppiando la soluzione per la posizione da quella per l’orientamento.")
6
Il problema cinematico inverso
Dati noti = posizione p ed orientamento R della pinza Passi della soluzione: Individuare un punto sulla struttura la cui posizione sia esprimibile in funzione delle sole variabili di giunto che determinano la posizione della struttura portante pW=p-d6a 2) Calcolare la posizione del polso in funzione delle prime tre variabili di giunto q1, q2, q3 3) Risolvere la cinematica inversa per le prime tre variabili di giunto q1, q2, q3 4) Calcolare R03 (q1, q2, q3) 5) Calcolare R36 (4, 5, 6)= (R03)TR 6) Risolvere la cinematica inversa per l’orientamento (4, 5, 6)
 Calcolare la posizione del polso in funzione delle prime tre variabili di giunto q1, q2, q3. 3) Risolvere la cinematica inversa per le prime tre variabili di giunto q1, q2, q3. 4) Calcolare R03 (q1, q2, q3) 5) Calcolare R36 (4, 5, 6)= (R03)TR. 6) Risolvere la cinematica inversa per l’orientamento (4, 5, 6)")
7
Cinematica differenziale
Determinazione della relazione tra le velocità dei giunti e le corrispondenti velocità angolari e lineari dell’organo terminale. Tali legami sono descritti da una matrice di trasformazione dipendente dalla configurazione del manipolatore.

8
Matrice Jacobiana e cinematica differenziale
Si consideri una funzione vettoriale g(x) di dimensioni (m x 1), i cui elementi gi siano dotati di derivata rispetto al vettore x di dimensioni (n x 1). Si definisce matrice Jacobiana (o Jacobiano) la matrice (m x n) Se x(t) è una funzione derivabile rispetto a t, si ha
 di dimensioni (m x 1), i cui elementi gi siano dotati di derivata rispetto al vettore x di dimensioni (n x 1). Si definisce matrice Jacobiana (o Jacobiano) la matrice (m x n) Se x(t) è una funzione derivabile rispetto a t, si ha.")
9
Cinematica differenziale
Jacobiano geometrico = matrice di trasformazione dipendente dalla configurazione corrente del braccio Jacobiano analitico = matrice delle derivate parziali della funzione di cinematica diretta rispetto alle variabili di giunto

11
Cinematica differenziale e statica
Importanza del calcolo dello Jacobiano del braccio: individuazione delle singolarità analisi della ridondanza algoritmi per l’inversione cinematica individuazione del legame tra forze applicate all’organo terminale e coppie sviluppate ai giunti (statica) derivazione equazioni di moto e sintesi degli schemi di controllo
 derivazione equazioni di moto e sintesi degli schemi di controllo.")
12
Singolarità cinematiche
Le configurazioni che causano una diminuzione di rango della matrice Jacobiana J sono dette singolarità cinematiche. In corrispondenza delle singolarità: si ha una perdita di mobilità della struttura possono esistere infinite soluzioni al problema cinematico inverso velocità ridotte nello spazio operativo possono causare velocità molto elevate nello spazio dei giunti

13
Singolarità cinematiche
Per manipolatori a polso sferico, il problema dell’individuazione delle singolarità può essere disaccoppiato: singolarità di polso, caratterizzate nello spazio dei giunti e difficilmente gestibili det(J22)=0 singolarità di struttura portante, caratterizzate nello spazio operativo (cartesiano) e facilmente evitabili. det(J11)=0
=0. singolarità di struttura portante, caratterizzate nello spazio operativo (cartesiano) e facilmente evitabili. det(J11)=0.")
14
Cinematica differenziale e statica
Obiettivo della cinematica differenziale è quello di determinare la relazione tra la velocità ai giunti e la velocità dell’organo terminale. P = Jp(q)q w = Jo(q)q V = = J(q) q J è lo Jacobiano geometrico del manipolatore p w
q w = Jo(q)q. V = = J(q) q J è lo Jacobiano geometrico del manipolatore. p. w.")
15
Cinematica differenziale e statica
Determinare le velocità ai giunti data la velocità nello spazio operativo V = = J(q) q q = J-1(q) Metodi di integrazione numerica consentono di ricavare il vettore q dal vettore delle velocità ai giunti p w p w J-1 è l’inversa dello Jacobiano
 q. q = J-1(q) Metodi di integrazione numerica consentono di ricavare il vettore q dal vettore delle velocità ai giunti. p. w. p. w. J-1 è l’inversa dello Jacobiano.")
16
Inversione della cinematica differenziale
Si ottiene per integrazione nel tempo della relazione inversa tra le velocità di giunto e le velocità dell’organo terminale. L’inversione cinematica prescinde dalla risolvibilità della struttura cinematica in quanto basata su legami differenziali. Lo Jacobiano deve essere una matrice quadrata e di rango pieno. Particolare attenzione deve essere posta nel trattare i casi di presenza di singolarità o di manipolatori ridondanti.

17
Esempi di sfruttamento della ridondanza
massimizzare la misura di manipolabilità, una funzione che si annulla in corrispondenza di una singolarità; minimizzare la distanza dai fine corsa di uno o più giunti; massimizzare la distanza da un ostacolo;

18
Statica Lo Jacobiano J lega anche le forze esplicate dall’organo terminale e le coppie applicate ai giunti: è il vettore delle coppie ai giunti è il vettore delle forze all’organo terminale

19
Pianificazione di traiettorie
OBIETTIVO: generare gli ingressi di riferimento per il sistema di controllo del moto: xstart --> xgoal PERCORSO: luogo dei punti dello spazio dei giunti o dello spazio operativo che il manipolatore deve descrivere nell’esecuzione del movimento assegnato TRAIETTORIA: percorso su cui è specificata la legge oraria di moto (velocità ed accelerazione in ogni punto)
")
21
Pianificazione di traiettorie
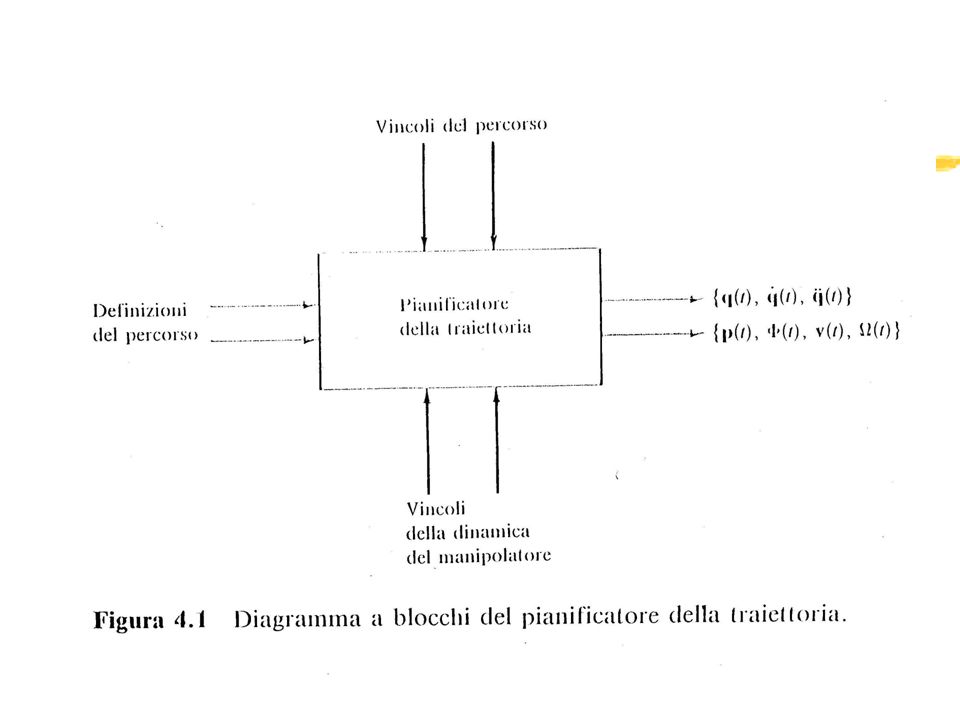
DATI IN INPUT: definizione del percorso vincoli del percorso vincoli dovuti alla dinamica del manipolatore DATI IN OUTPUT: nello spazio dei giunti: traiettorie dei vari giunti nello spazio operativo: traiettoria dell’organo terminale

22
Traiettorie nello spazio dei giunti
L’algoritmo di pianificazione genera una funzione q(t) che interpola i valori assegnati per le variabili di giunto nel rispetto dei vincoli imposti. In generale l’utente individua la posizione e l’orientamento desiderati per l’organo terminale (spazio operativo). Generare una traiettoria nello spazio dei giunti richiede un’inversione cinematica che fornisca i valori di riferimento per le variabili di giunto.
 che interpola i valori assegnati per le variabili di giunto nel rispetto dei vincoli imposti. In generale l’utente individua la posizione e l’orientamento desiderati per l’organo terminale (spazio operativo). Generare una traiettoria nello spazio dei giunti richiede un’inversione cinematica che fornisca i valori di riferimento per le variabili di giunto.")
23
Traiettorie nello spazio dei giunti
L’algoritmo di pianificazione deve in generale soddisfare i seguenti requisiti: Le traiettorie generate devono essere poco onerose dal punto di vista computazionale Le posizioni e le velocità dei giunti siano funzioni continue del tempo Siano minimizzati effetti indesiderati (e.g. traiettorie a curvatura non regolare)
")
24
Traiettorie nello spazio dei giunti
Moto punto-punto: il manipolatore deve muoversi da una configurazione iniziale delle variabili di giunto ad una finale in un intervallo di tempo fissato tf. Per imporre la legge di moto su un giunto si possono scegliere funzioni polinomiali. Polinomio cubico: consente di imporre i valori iniziale qi e finale qf delle variabili di giunto e le velocità iniziale e finale (generalmente nulle). Polinomio di quinto grado: consente di imporre i valori iniziale qi e finale qf delle variabili di giunto, le velocità iniziale e finale e il valore dell’accelerazione iniziale e finale.
. Polinomio di quinto grado: consente di imporre i valori iniziale qi e finale qf delle variabili di giunto, le velocità iniziale e finale e il valore dell’accelerazione iniziale e finale.")
25
Traiettorie nello spazio dei giunti
Polinomio cubico: (velocità parabolica) (accelerazione lineare) I coefficienti del polinomio sono determinati imponendo le 4 condizioni iniziali su posizione e velocità:
 (accelerazione lineare) I coefficienti del polinomio sono determinati imponendo le 4 condizioni iniziali su posizione e velocità:")
27
Profilo di velocità trapezoidale

28
Traiettorie nello spazio dei giunti Profilo di velocità trapezoidale
Il profilo di velocità trapezoidale è utilizzato in ambito industriale. Presenta una accelerazione costante nella fase di partenza, una velocità di crociera e una deceleraione costante nella fase di arrivo. La traiettoria corrispondente è di tipo polinomiale misto: un tratto lineare raccordato con due tratti parabolici nell’intorno delle posizioni iniziale e finale.

29
Traiettorie nello spazio operativo
L’algoritmo di pianificazione di traiettoria nello spazio operativo genera la legge di moto dell’organo terminale, secondo un percorso di caratteristiche geometriche definite nello spazio operativo. Per esprimere analiticamente il moto dell’organo terminale si fa riferimento a primitive di percorso.

30
Traiettorie nello spazio operativo
Siano p un vettore 3x1 e f() una funzione vettoriale continua nell’intervallo [i, f], p= f() definisce la rappresentazione parametrica della curva e viene detto parametro. Si chiama ascissa curvilinea s del punto p la lunghezza d’arco di di estremi p e pi se p segue pi, l’opposto di tale lunghezza se p precede pi. La relazione p= f(s) fornisce una nuova rappresentazione parametrica di
 una funzione vettoriale continua nell’intervallo [i, f], p= f() definisce la rappresentazione parametrica della curva e viene detto parametro. Si chiama ascissa curvilinea s del punto p la lunghezza d’arco di di estremi p e pi se p segue pi, l’opposto di tale lunghezza se p precede pi. La relazione p= f(s) fornisce una nuova rappresentazione parametrica di ")
31
Traiettorie nello spazio operativo
In corrispondenza del punto p sono definiti 3 versori caratteristici della curva: versore tangente versore normale versore binormale

32
Traiettorie nello spazio operativo

33
Traiettorie nello spazio operativo
Segmento nello spazio: Il segmento congiungente il punto pi con il punto pf ha rappresentazione parametrica La legge oraria lungo il percorso è descritta dalla funzione s(t)
")
34
Controllo del moto In generale, il problema del controllo di un manipolatore consiste nel determinare l’andamento delle forze o coppie che gli attuatori devono applicare ai giunti in modo da garantire l’esecuzione di operazioni comandate Il controllo del moto può essere realizzato nello spazio dei giunti o nello spazio Cartesiano.

35
Controllo nello spazio dei giunti
Il problema del controllo nello spazio dei giunti richiede la risoluzione di due problemi: Inversione cinematica per convertire le specifiche di moto espresse nello spazio operativo in specifiche di moto nello spazio dei giunti Sistema di controllo nello spazio dei giunti in grado di garantire l’inseguimento dei riferimenti ottenuti al punto 1)
")
36
Controllo nello spazio dei giunti

37
Controllo nello spazio operativo

38
Percezione del robot Sensori per la percezione dello stato interno del robot (sensori per la misura della posizione dei giunti del braccio, ad es. encoder) utilizzati per il controllo del moto del manipolatore Sensori per la percezione dello stato esterno del manipolatore (sensori di prossimità, contatto e distanza, ad es. visione) utilizzati per la pianificazione dei comportamenti del robot
 utilizzati per il controllo del moto del manipolatore. Sensori per la percezione dello stato esterno del manipolatore (sensori di prossimità, contatto e distanza, ad es. visione) utilizzati per la pianificazione dei comportamenti del robot.")
39
Encoder incrementale

40
Controllo di un manipolatore nello spazio dei giunti
Sistema di controllo PID (Proporzionale-Integrale-Derivativo):
:")
41
Controllo di un manipolatore nello spazio dei giunti
Kd Kp + Sist Attuazione V Robot +/- qd ep q Ki ∫

42
Controllo di un manipolatore nello spazio dei giunti
In ogni istante di campionamento devo passare da q(t) = qact a q(t+dt) = qnext qact -> qnext : impostare una tensione al motore per far compiere al giunto qnext – qact gradi
 = qact a q(t+dt) = qnext. qact -> qnext : impostare una tensione al motore per far compiere al giunto qnext – qact gradi.")
43
Controllo del moto Un sistema di controllo fornisce un comando in tensione o in corrente agli attuatori (motori) dei giunti. La potenza di controllo Pc associata al segnale di controllo deve essere trasformata in potenza utile Pu adatta ad attuare il movimento dei giunti

44
Controllo del moto Un sistema di attuazione è costituito da:
una sorgente di alimentazione un amplificatore di potenza un servomotore un organo di trasmissione

45
Algoritmo del controllo
q = 0; p=pi; q=qi; While t<tf J(q) q(t) = q(t-dt) + q(t-dt)dt q(t) = J-1(q(t-dt)) v(t-dt) t=t+dt End while
 q(t) = q(t-dt) + q(t-dt)dt. q(t) = J-1(q(t-dt)) v(t-dt) t=t+dt. End while.")
46
Struttura geometrica del Dexter

47
Architettura hardware del Dexter
PC CPU Controllo Tensioni di riferimento Tensioni per i motori Dexter (Attuatori e Encoder) Schede Controllo Assi Convertitore AD/DA Driver di Potenza Segnali Encoder
 Schede Controllo Assi. Convertitore AD/DA. Driver di Potenza. Segnali Encoder.")
48
Dinamica di un robot manipolatore
Il modello dinamico di un manipolatore descrive le relazioni esistenti tra le coppie di attuazione ai giunti e il moto della struttura. La conoscenza del modello dinamico è fondamentale nei problemi di simulazione del moto, di analisi di strutture di manipolazione e di determinazione degli algoritmi di controllo.

49
Dinamica di un robot manipolatore
Per un manipolatore a link rigidi, il modello dinamico nello spazio dei giunti è espresso come:

50
Dinamica di un robot manipolatore
La matrice B è di dimensioni nxn e tiene conto dei momenti di inerzia di ogni link. Il vettore è di dimensioni nx1 e tiene conto dell’effetto centrifugo e dell’effetto di Coriolis indotto a ciascun giunto e rappresentano i vettori delle coppie di attrito viscoso e di attrito statico coulombiano g(q) è il vettore di coppie gravitazionali è il vettore nx1 delle coppie ai giunti è il vettore di coppie corrispondenti alle forze esterne h agenti sull’organo terminale
 è il vettore di coppie gravitazionali. è il vettore nx1 delle coppie ai giunti. è il vettore di coppie corrispondenti alle forze esterne h agenti sull’organo terminale.")











 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")









 che determinano le variazioni dello stato di moto.>")
 A.A. 99/00 B. Modulo di Robotica>")