Scaricare la presentazione
1
Controllo del Moto Controllo nello spazio dei giunti

2
Controllo del Moto Controllo nello spazio operativo

3
Controllo nello spazio dei giunti
Determinare le n componenti di forza generalizzate tali che risulti : A causa degli organi di trasmissione : Matrice diagonale e costante

4
Controllo nello spazio dei giunti
Sostituendo otteniamo : Dove : Attrito viscoso riportato all’asse del motore Disturbo = Contributo dipendente dalla configurazione

6
Controllo indipendente ai giunti
il coefficiente d’attrito viscoso trascurabile rispetto al coefficiente d’attrito elettrico

7
Controllo indipendente ai giunti
costante di guadagno velocità – tensione costante di tempo caratteristica del motore

8
Controllo in retroazione

9
Controllo in retroazione
Un’efficiente riduzione degli effetti del disturbo d sull’uscita è assicurata da: · Un elevato guadagno degli amplificatori a monte del punto d’applicazione del disturbo; · La presenza, nel controllore, di un’azione integrale al fine di annullare, a regime ( costante), l’effetto della componente gravitazionale sull’uscita. PI = Proporzionale Integrale
, l’effetto della componente gravitazionale sull’uscita. PI = Proporzionale Integrale.")
10
Retroazione di posizione

11
Retroazione di posizione
Blocco interno Ramo di azione diretta : Ramo di retroazione : H(s) = kTP
 = kTP.")
12
il sistema risulta stabile
il sistema risulta intrinsecamente instabile il sistema risulta stabile

13
il sistema migliora notevolmente le sue caratteristiche di prontezza.
Fdt a ciclo chiuso

14
Fdt disturbo-uscita Da essa si osserva che conviene aumentare KP in modo da ridurre l’influenza del disturbo sull’uscita durante il transitorio. Conviene tuttavia scegliere KP con valori non molto elevati, per evitare che al sistema di controllo siano assegnate caratteristiche di risonanza poco accettabili. Osserviamo, inoltre, che lo zero all’origine dovuto al controllore PI consente di annullare, quando è costante, gli effetti della gravità sulla posizione.

15
Retroazione di posizione e velocità

16
ponendo TV = Tm lo zero del controllore cancella gli effetti del
riportando l’anello di retroazione in velocità in parallelo all’anello di retroazione in posizione Fdt ramo diretto Fdt ramo in retroazione ponendo TV = Tm lo zero del controllore cancella gli effetti del polo reale del motore

18
Quindi, fissate le costanti di trasduzione kTP e kTV, si trova KV dalla prima eq. e successivamente KP dalla seconda equazione

19
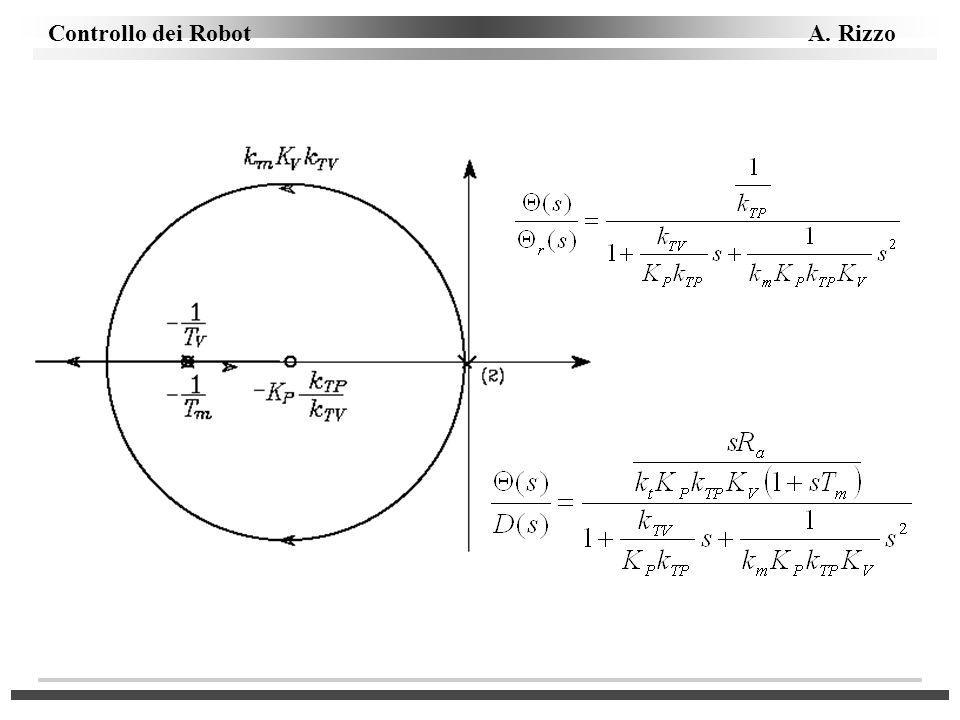
Retroazione di posizione velocità e accelerazione

20
Fdt ramo di azione diretta :
Fdt ramo in retroazione :

21
Scelta dello zero : Oppure :

22
Stavolta le specifiche e il fattore di riduzione degli effetti indotti dal disturbo
possono essere fissati indipendentemente.

23
Stima dell’accelerazione

24
Compensazione in avanti decentralizzata

25
Coppia precalcolata

26
Hardware per sistemi di controllo assi
DSP per motion control (HCTL1100,LM628/9) Microcontrollori (MPC555, etc.) Schede controllo assi (GALIL,PMD, etc.)
 Microcontrollori (MPC555, etc.) Schede controllo assi (GALIL,PMD, etc.)")
27
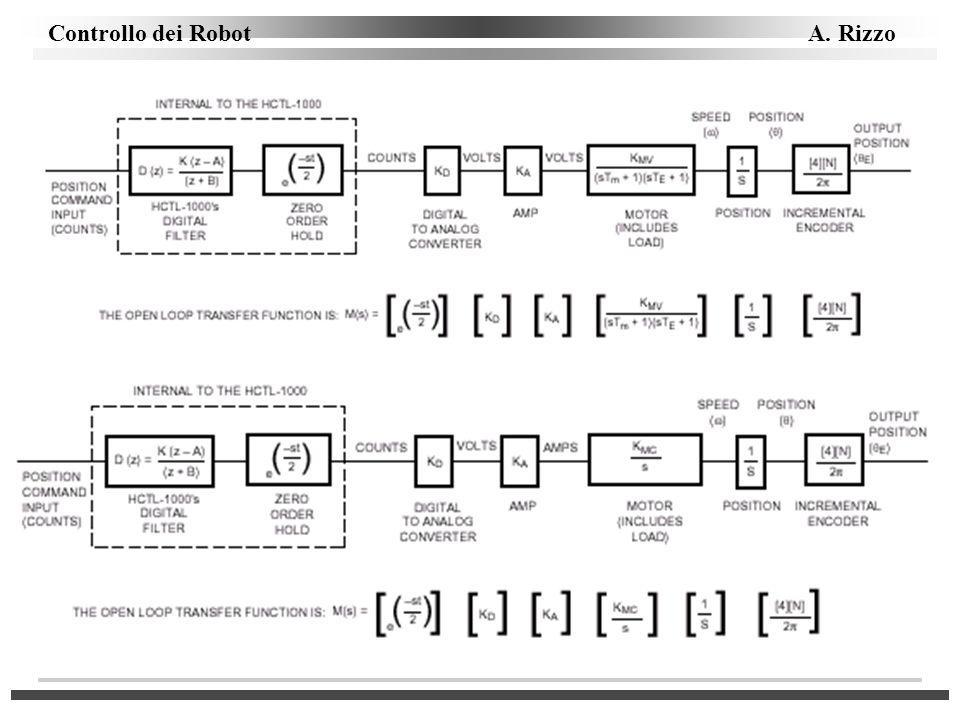
HCTL1100 Agilent (Ex HP)
")
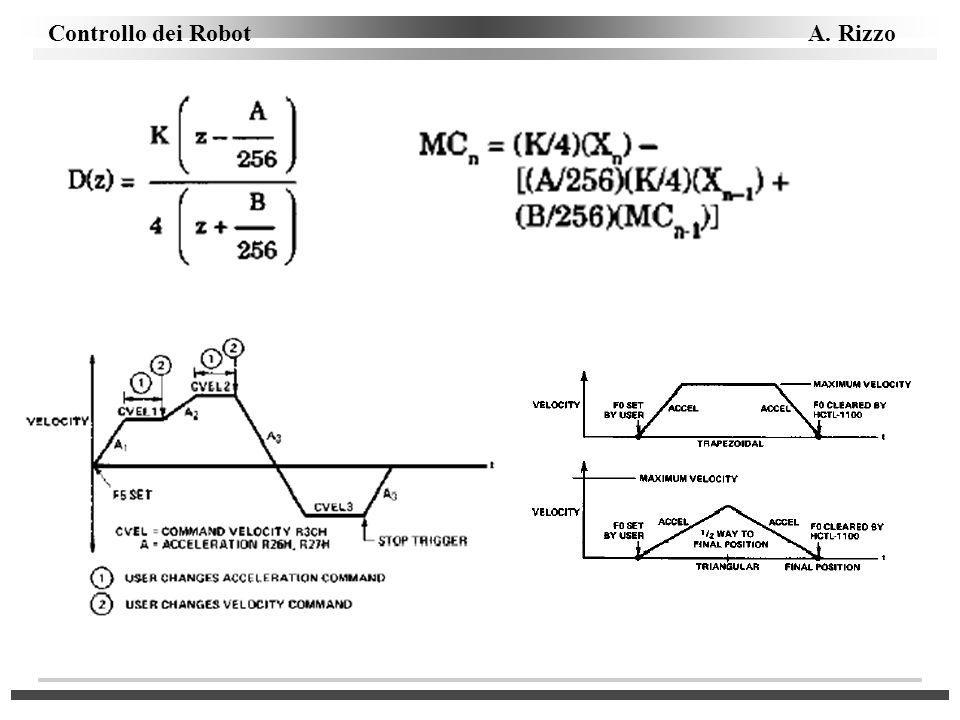
31
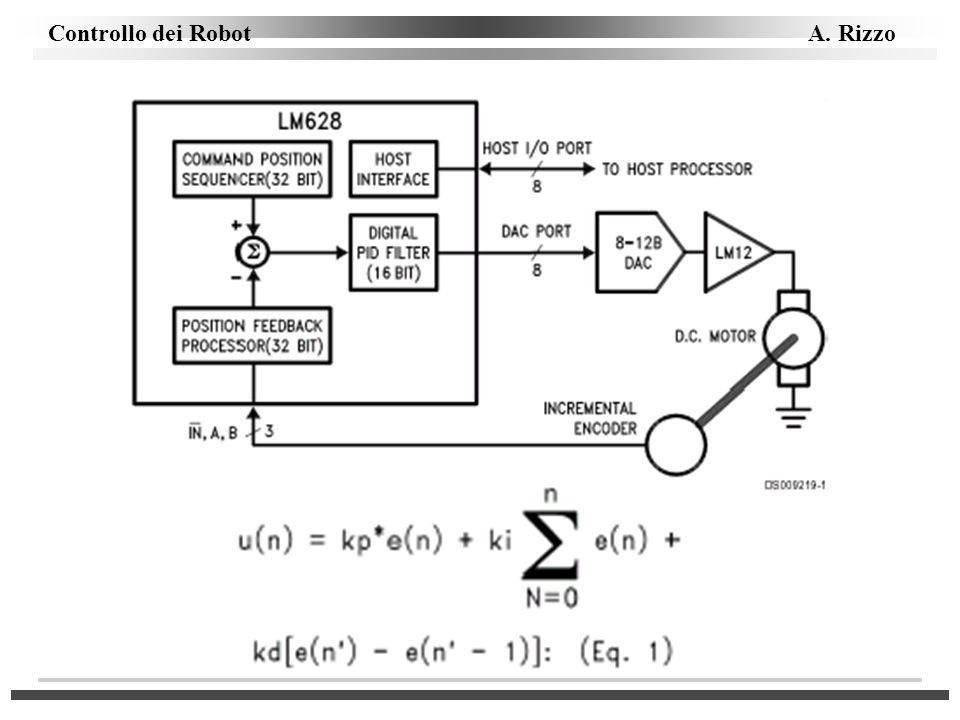
LM628/9 National

34
Microcontrollori MPC555

35
Schede controllo assi

39
CONTROLLO CENTRALIZZATO
Trasmissioni : Krq = qm Attuatori :

40
Sistema controllato in tensione
Attrito viscoso meccanico e elettrico (matrice diagonale) Ingresso di controllo del sistema
 Ingresso di controllo del sistema.")
41
Sistema controllato in coppia
F = Fv u = KrKtGivc = ;

42
Controllo di sistemi non lineari
Esempio : robot Scegliamo come variabili di stato :

43
Punto di equilibrio Esempio: Robot

44
Stabilità dell’equilibrio
Un punto di equilibrio xe è stabile nel senso di Lyapunov se partendo abbastanza vicino a xe all’istante iniziale, lo stato vi resterà vicino negli istanti successivi. Asintotica stabilità : Globale asintotica stabilità : In tal caso può esserci un solo stato di equilibrio Uniforme stabilità : Indipendente da t (tempo invariante)
")
45
Stabile Instabile

46
Asintotica stabilità Globale asintotica stabilità

47
Teorema di Lyapunov Assumiamo che l’origine x=0 è un punto di equilibrio : Intorno dell’origine L’origine è un punto di equilibrio STABILE se

48
Asintoticamente stabile se
TEOREMA DI LASALLE Asintoticamente stabile se Ed inoltre solo per x=0

49
Esempio Sistema lineare Data una P>0 soluzione di Con Q>0
E’ una funzione di Lyapunov, infatti

50
Controllo PD con compensazione di gravità
Stato del sistema errore Funzione candidata di Lyapunov: Energia cinetica Energia potenziale elastica virtuale

51
Derivando Da Si ricava Sostituendo : Scegliendo : Nullo ! Proprietà di

52
Azione proporzionale-derivativa
Postura di equilibrio : All’equilibrio :

53
Controllo PD con compensazione di gravità
Tramite questa tecnica di controllo qualunque postura di equilibrio risulta globalmente asintoticamente stabile La componente gravitazionale va compensata in maniera perfetta (affinché il risultato sia garantito matematicamente)
")
54
Feedback Linearization
controllo Se utilizziamo :

55
Controllo a dinamica inversa di un manipolatore (momento calcolato, feedback linearization)
Posto : Scelta la legge di controllo :

57
Attraverso la scelta delle matrici KP e KD diagonali si ottiene un sistema disaccoppiato: la componente del riferimento ri influenza la sola variabile di giunto qi con una relazione i/o del secondo ordine caratterizzata da una pulsazione naturale wni e da un coeff. di smorz. xi

58
Cancellazione dinamica
PD

59
Controllo nello Spazio Operativo
Controllo con inversa dello Jacobiano

60
Controllo nello Spazio Operativo
Controllo con trasposta dello Jacobiano

61
Controllo PD con compensazione di gravità
Errore nello spazio dei giunti Funzione candidata di Lyapunov Simmetrica e difinita positiva Derivando

62
Scegliendo come legge di controllo :
Definita positiva

63
Postura di equilibrio All’equilibrio : Se lo Jacobiano è a rango pieno :

64
Controllo PD con compensazione di gravità
Tale schema di controllo rivela un’analogia con quello basato sulla trasposta dello Jacobiano

65
Controllo a dinamica inversa
Derivando una volta la relazione della cinematica differenziale Per un manipolatore non ridondante scegliendo : Matrici diagonali definite positive

67
Controllo a dinamica inversa

68
Considerazioni conclusive
Il controllo nello spazio dei giunti è in genere più complesso del controllo nello spazio operativo In presenza di singolarità e/o ridondanza: Negli schemi con trasposta di J se l’errore entra nel nullo di J il manipolatore si ferma in una configurazione diversa da quella desiderata Negli schemi con inversa di J si devono trovare accorgimenti numerici (es. inversa ai valori singolari smorzati) Il controllo dei giunti è in un certo senso trasparente a tali problemi, in quanto ridondanze e singolarità vengono affrontate a monte, durante l’inversione cinematica, mentre in questo caso devono essere gestite all’interno dell’anello di controllo Se, come in questi casi, si usa lo Jacobiano analitico bisogna rifarsi a rappresentazioni minime dell’orientamento. Per utilizzare lo Jacobiano geometrico (più semplice da determinare) bisogna scegliere rappresentazioni più complesse (es. asse/angolo o quaternione unitario)
 Il controllo dei giunti è in un certo senso trasparente a tali problemi, in quanto ridondanze e singolarità vengono affrontate a monte, durante l’inversione cinematica, mentre in questo caso devono essere gestite all’interno dell’anello di controllo. Se, come in questi casi, si usa lo Jacobiano analitico bisogna rifarsi a rappresentazioni minime dell’orientamento. Per utilizzare lo Jacobiano geometrico (più semplice da determinare) bisogna scegliere rappresentazioni più complesse (es. asse/angolo o quaternione unitario)")
69
Controllo dell’interazione
Controllo di cedevolezza Utilizziamo una legge di controllo PD con compensazione di gravità nello spazio operativo All’equilibrio stavolta, con : Vettore equivalente delle forze di contatto

70
J = TA()JA (Esempio manipolatore in singolarità di spalla)
Dipende dalla configurazione (Esempio manipolatore in singolarità di spalla)
")
71
( ) Modello semplice ma significativo del contatto:
Ambiente elasticamente cedevole e disaccoppiato K semi-definita positiva ( ) Posizione di equilibrio dell’ambiente non deformato
 Posizione di equilibrio. dell’ambiente non deformato.")
72
La matrice Ka definisce la rigidezza dell’ambiente
La matrice Ka definisce la rigidezza dell’ambiente. Ove è possibile definire la sua inversa, essa rappresenta la cedevolezza dell’ambiente. E’ detta cedevolezza passiva perché descrive una caratteristica intrinseca dell’ambiente nello spazio operativo Ricordando che essa è semidefinita positiva ne consegue che il conceto di cedevolezza non è caratterizzato, a livello globale, su tutto lo spazio operativo, ma ca opportunamente specificato per quelle direzioni (l’immagine di Ka) lungo le quali il moto dell’organi terminale è vincolato dall’ambiente Invece la matrice Kp-1 rappresenta una cedevolezza attiva poiché è il risultato dell’applicazione di una opportuna legge di controllo di posizione
 lungo le quali il moto dell’organi terminale è vincolato dall’ambiente. Invece la matrice Kp-1 rappresenta una cedevolezza attiva poiché è il risultato dell’applicazione di una opportuna legge di controllo di posizione.")
73
Con il modello di ambiente
La relazione Diventa

74
All’equilibrio :

75
La posizione di equilibrio dipende dalla posizione di riposo per l’ambiente e dalla posizione desiderata imposta dal sistema di controllo del manipolatore L’interazione dei due sistemi (ambiente e manipolatore) è influenzata dal peso associato alle rispettive caratteristiche di cedevolezza E’ possibile agire sulla cedevolezza attiva in maniera tale da far dominare il manipolatore sull’ambiente o viceversa Tale dominanza può essere selettiva rispetto alle direzioni (valori elevati degli elementi di Kp corrispondenti alle direzioni in cui si desidera che l’ambiente ceda, e viceversa)
 è influenzata dal peso associato alle rispettive caratteristiche di cedevolezza. E’ possibile agire sulla cedevolezza attiva in maniera tale da far dominare il manipolatore sull’ambiente o viceversa. Tale dominanza può essere selettiva rispetto alle direzioni (valori elevati degli elementi di Kp corrispondenti alle direzioni in cui si desidera che l’ambiente ceda, e viceversa)")
76
Considerando adesso l’espressione della forza di contatto all’equilibrio si riconosce l’opportunità di accordare le caratteristiche di cedevolezza del manipolatore a quelle dell’ambiente, che può presentare caratteristiche differenti lungo direzioni diverse dello spazio operativo Lungo direzioni in cui l’ambiente presenta rigidezza elevata è opportuno rendere il manipolatore cedevole affidando allo stesso il compito di graduare l’intensità dell’interazione mediante una scelta opportuna della posizione desiderata e viceversa

77
Ambiente rigido e manipolatore cedevole: x(inf)=xe, il manipolatore genera una forza dipendente da Kp che può essere specificata mediante la scelta della componente di (xd-xe) lungo la direzione di interesse Ambiente cedevole e manipolatore rigido: x(inf)=xd, è l’ambiente a generare una forza elastica lungo le direzioni di interesse
=xd, è l’ambiente a generare una forza elastica lungo le direzioni di interesse.")
78
Esempio All’equilibrio :

79
Il manipolatore domina sull’ambiente
(cedevolezza passiva) L’ambiente domina sul manipolatore (cedevolezza attiva)
 L’ambiente domina sul manipolatore. (cedevolezza attiva)")











 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")












