Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
E SISTEMI DI RIFERIMENTO
MECCANICA CLASSICA E SISTEMI DI RIFERIMENTO

2
MECCANICA CLASSICA Cinematica Dinamica Statica

3
Dinamica relazione alle forze esercitate su di esso.
E’ lo studio del moto di un corpo in relazione alle forze esercitate su di esso.

4
il moto può essere traslatorio , rotatorio, rototraslatorio
d’ora in poi con il termine “moto” intenderemo il moto traslatorio

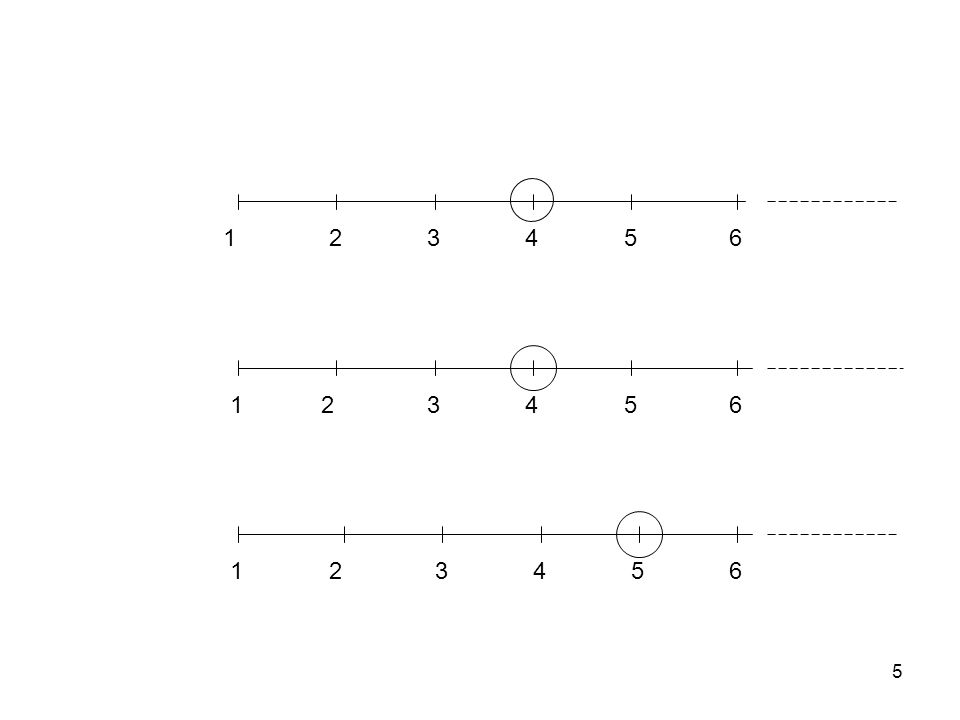
5
1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6
6
sistema di riferimento
z X = 3 Y = 4 Z = 2 2 4 y 3 x

7
il moto è relativo al sistema di riferimento

8
PRIMA LEGGE DELLA DINAMICA
(legge d’inerzia) Se la risultante delle forze applicate ad un corpo è nulla, il corpo mantiene costante la sua velocità.
 Se la risultante delle forze applicate ad un. corpo è nulla, il corpo mantiene costante. la sua velocità.")
9
Sistemi di riferimento inerziali
Sono i sistemi di riferimento dove vale la legge d’inerzia

10
Accelerazione Nel moto uniformemente accelerato
l’accelerazione è la variazione di velocità nell’unità di tempo. a = 3 m/s2 (moto rettilineo) t (s) v(m/s) 1 3 2 6 9
 t (s) v(m/s)")
11
SECONDA LEGGE DELLA DINAMICA
Se la risultante delle forze applicate ad un corpo non è nulla, il corpo si muove di moto accelerato. Forza ed accelerazione sono fra loro direttamente proporzionali. F = ma

12
Terza legge della dinamica
Se un corpo A esercita una forza su di un corpo B, il corpo B a sua volta esercita sul corpo A una forza con la stessa intensità, con la stessa direzione e con verso opposto.

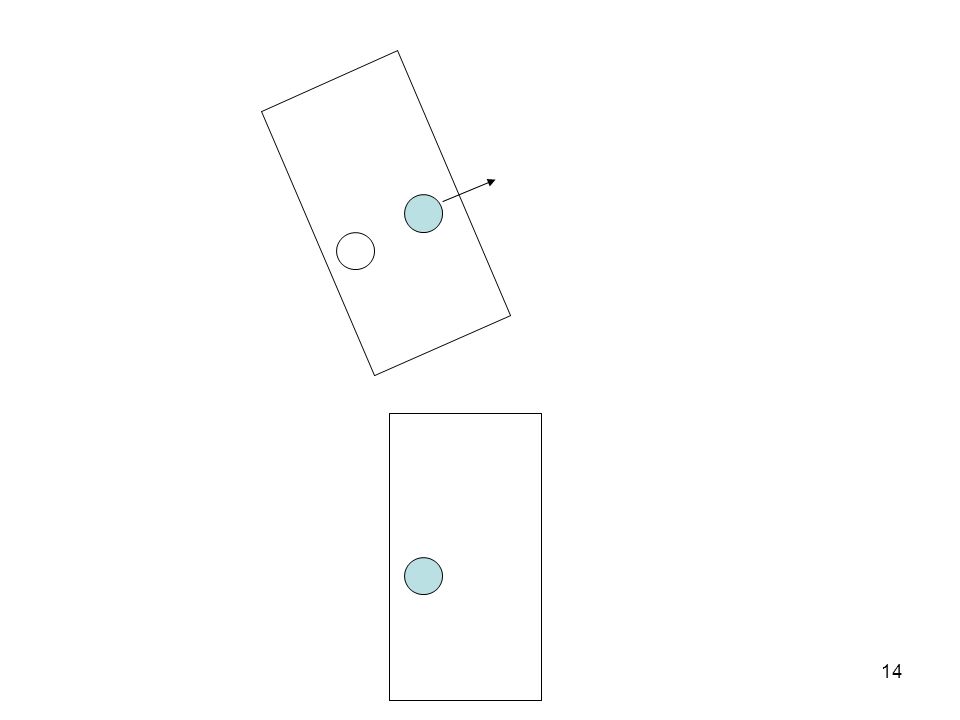
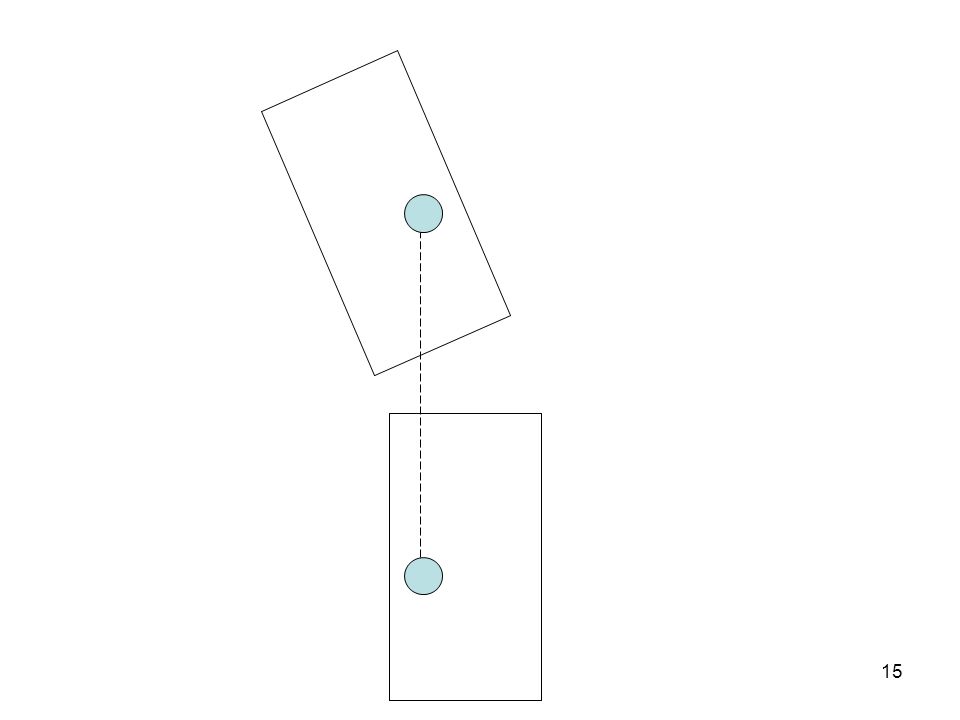
13
Forze apparenti 1 - Forza centrifuga

16
Sistemi di riferimento non inerziali
Sono sistemi di riferimento dove non vale la legge d’inerzia Un sistema di riferimento accelerato rispetto ad un sistema di riferimento inerziale è un sistema di riferimento non inerziale

17
Esempi di sistemi di riferimento non inerziali
Veicolo in curva (accelerazione centripeta) Veicolo in partenza (accelerazione positiva) Veicolo in frenata (accelerazione negativa) Piattaforma rotante (accelerazione centripeta)
 Veicolo in partenza (accelerazione positiva) Veicolo in frenata (accelerazione negativa) Piattaforma rotante (accelerazione centripeta)")
18
Accelerazione centripeta: variazione di velocità in direzione

19
Forze apparenti 2 - Introducendo la forza centrifuga
in un sistema di riferimento rotante (che non è inerziale), possiamo applicare in esso le leggi della dinamica come se fosse un sistema di riferimento inerziale
, possiamo. applicare in esso le leggi della. dinamica come se fosse un sistema. di riferimento inerziale.")
20
Forze apparenti 3 - Introducendo le forze d’inerzia
in un sistema di riferimento non inerziale possiamo applicare in esso le leggi della dinamica come se fosse un sistema di riferimento inerziale

21
Legge di gravitazione universale
Ogni corpo esercita una forza di attrazione gravitazionale su ogni altro corpo. Questa forza è direttamente proporzionale al prodotto delle masse dei due corpi considerati ed inversamente proporzionale al quadrato della loro distanza. m1m2 F = G r2

22
La velocità di un corpo è relativa al sistema di riferimento
v = v1 + v2 v1 = 10 km/h; v2 = 2 km/h v = 12 km/h

Presentazioni simili








 copre aree uguali in tempi uguali. http://www.gpmeneghin.com/schede/fisica/keplero.htm.>")











