Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Lezione 3) Cenni di teoria dell’elasticità, sforzi e deformazioni, l’equazione delle onde elastiche
 Cenni di teoria dell’elasticità, sforzi e deformazioni, l’equazione delle onde elastiche")
7
Il tensore dello sforzo

8
Condizione di equilibrio per le forze
La condizione è verificata se si ha:

9
Condizione di equilibrio per i momenti
La condizione è verificata se si ha:

10
In assenza di equilibrio ed in presenza di forze di volume alle condizioni di equilibrio
ricavate in precedenza si dovrà aggiungere un termine inerziale ed un termine legato alle forze di volume, per la componente in direzione 1 si ottiene quindi: In assenza di forze di volume l’equazione per la componente sopra descritta si trasforma come segue: Tale equazione rappresenta l’equazione omogenea del moro e per risolverla è necessario esprimere le componenti dello stress in funzione del vettore spostamento u

11
l e m sono dette costanti di Lame’,
La legge che lega sforzo e deformazione è la legge di Hooke che stabilisce una proporzionalità diretta tra le due grandezze in campo elastico. In particolare ogni componente dello sforzo può essere legata linearmente ad ogni componente della deformazione secondo la legge seguente: Le 81 costanti possono essere ridotte a 36 utilizzando la simmetria del tensore delle deformazioni, ed ancora, a 27. Per materiali isotropi la legge si semplifica ulteriormente riducendosi alla seguente forma: l e m sono dette costanti di Lame’, m è chiamato modulo di taglio ed è nullo nei fluidi

12
Sostituendo agli sforzi la loro espressione in termini di deformazione ed alle deformazioni la loro espressione in termini di spostamento si ottiene:

13
Sostituendo nella equazione del moto si ottiene:

14
Le tre equazioni possono essere scritte in forma
vettoriale nel seguente modo:

16
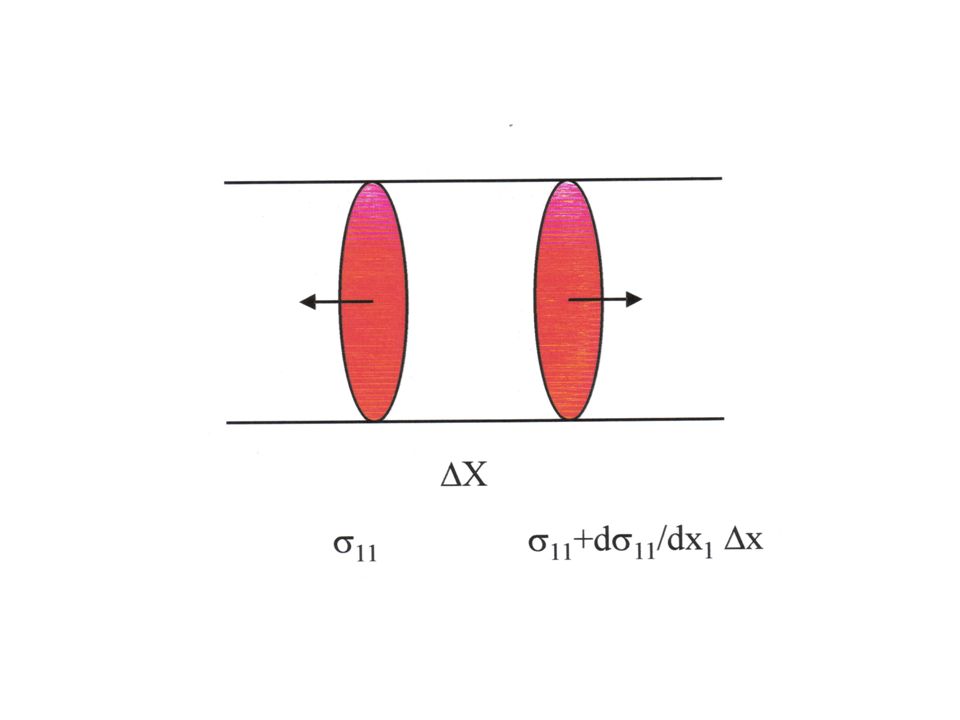
Supponiamo di avere una barra elastica lunga e sottile che oscilli in direzione della sua lunghezza sotto l’azione di forze esterne. L’equazione del moto si otterrà uguagliando i termini di inerzia al gradiente di sforzo attraverso la barra che non si troverà in condizioni di equilibrio : La soluzione generale di questa equazione è data dalla seguente funzione :

17
Cerchiamo una soluzione dell’equazione precedente nella forma :
da cui si ottiene sostituendo nell’equazione di partenza : Le equazioni precedenti ammettono soluzioni di tipo armonico per cui la soluzione finale sarà data da :

18
Si definisce gradiente di un campo scalare f il vettore:
Il gradiente punta nella direzione di massima pendenza del campo f Si definisce divergenza di un campo vettoriale La divergenza è un campo scalare che misura il flusso di un vettore attraverso un volume unitario, vale la relazione:

19
Il Laplaciano di un campo scalare è dato dalla divergenza del gradiente
Il Laplaciano di un campo vettoriale è un vettore che ha come componenti i Laplaciani delle componenti originali, e si può scrivere come: Il teorema di Helmotz dice che qualsiasi campo vettoriale u può essere rappresentato in termini di un potenziale scalare e di un potenziale vettoriale secondo la seguente relazione:

20
Utilizzando il teorema di Helmotz possiamo riscrivere l’equazione delle onde in termini di potenziali nella seguente forma: L’equazione scritta sopra è soddisfatta se si pongono uguali a zero simultaneamente i due termini, si ottiene quindi una equazione scalare ed una equazione vettoriale che danno come soluzioni onde viaggianti con velocità a (onde P) e con velocità b (onde S) espresse dalle seguenti relazioni:
 e con velocità b (onde S) espresse dalle seguenti relazioni:")
21
Che porta a quattro equazioni accoppiate, analogamente a quanto visto
In tre dimensioni andiamo a considerare lo spostamento delle onde P utilizzando la relazione tra i potenziali espressi dal teorema di Helmoltz e gli spostamenti: Cerchiamo una soluzione del tipo: Che porta a quattro equazioni accoppiate, analogamente a quanto visto nel caso monodimensionale.

22
Sostituendo nell’equazione per il potenziale si ottiene:
Che diventa:

23
Ponendo: Si ottiene: Nell’ipotesi che: Si ottengono le equazioni:

24
La soluzione dei singoli termini è data da funzioni oscillanti, per cui la soluzione generale si ottiene nella forma seguente: Che rappresenta un insieme di onde piane nello spazio. Il fatto che la soluzione sia legata ad onde piane deriva dalla dipendenza lineare del termine di fase dalle coordinate spaziali e che quindi la fase assuma valori costanti su un piano. Un discorso del tutto analogo si può ripetere per il potenziale vettore legato alle onde S per cui si otterranno soluzioni equivalenti a quelle ottenute per le onde P ma con velocità di propagazione b.

25
Il vettore k sarà ortogonale al fronte d’onda ed il suo modulo sarà proporzionale alla velocità dell’onda stessa. Infatti prendendo ad esempio la soluzione Il termine di fase rappresenta l’equazione di un piano, ad esempio per t=0 e fase nulla diventa si ottiene: Da cui si deriva che il vettore k è ortogonale al piano dell’onda e che quindi è orientato lungo la direzione di propagazione dell’onda stessa.

26
Valutiamo ora lo spostamento delle onde P a partire dal potenziale prima calcolato:
Che nel caso x2=0 diventa:

27
Facciamo ora l’ipotesi di far propagare la nostra onda piana con k nel piano x1,x3, questo è sempre possibile facendo opportune scelte di coordinate. In questo caso la seconda componente del vettore k si annulla. Imponiamo che la fase dell’onda sia costante: Che rappresenta il fronte d’onda piana nel piano x1,x3, il vettore k è perpendicolare alla retta e le sue componenti sono date da:

28
Valutiamo ora lo spostamento delle onde P a partire dal potenziale prima calcolato:
Che nel caso x2=0 diventa:

29
Da cui si vede che lo spostamento delle onde P è nel piano di propagazione dell’onda stessa. Calcoliamo ora le componenti dello spostamento delle onde P nelle due direzioni x1 e x3: Da cui si vede che lo spostamento P è lungo la direzione di propagazione.

30
Consideriamo ora lo spostamento legato alle onde S ed espresso anche stavolta
in termini del potenziale vettore del teorema di Helmoltz: Come nel caso delle onde P imponiamo che il vettore k sia nel piano x1,x3, per cui si ottiene:

31
Se associamo il piano x1,x2 con la superficie della terra e l’asse x3 con la verticale notiamo che la prima e la terza componente del moto associato alle onde S giace nel piano x1,x3 ed è chiamato moto SV, mentre la seconda componente giace nel piano ortogonale ed è chiamata SH. Il campo totale di spostamento risulta quindi dalla somma dei moti P,SV ed SH: I moti P, SV sono completamente disaccoppiati dal moto SH.

32
Per il moto SH si ha: Dove le due componenti del potenziale vettore soddisfano l’equazione delle onde: Anche in questo caso i fronti d’onda si comportano come descritto per le onde P ed il moto è ortogonale alla direzione di propagazione.

33
Per lo spostamento SV si ha:

34
Che rappresenta una retta con pendenza –k1/k3 nel piano x1x3.
Nel caso particolare Il fronte d’onda è dato da: Che rappresenta una retta con pendenza –k1/k3 nel piano x1x3. Se calcoliamo il rapporto tra le componenti del moto SV otteniamo: Che ci fa vedere come anche per le onde SV il moto è ortogonale alla direzione di propagazione.

Presentazioni simili






>")





, una sua funzione ( es. y = f(x) ) e la.>")







