Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Metodi formali nel progetto dellinterazione Anna Labella

2
Due aspetti La struttura del tempo Il tipo di interazione

3
Tempo discreto Tempo continuo a gradini Tempo continuo la struttura del tempo Qual è più facile e quale più utile?

4
Handshaking Broadcasting a braccetto Controllo Rilevamento di segnale Rendez-vous ecc. Il tipo di interazione

5
Esempi tratti dallinterazione Combinazione di diversi processi Per mezzo di rendez-vous

6
Esempi tratti dallinterazione Interfacce come tipici esempi di coesistenza di diversi tipi di tempo

7
Cosa ci interessa e cosa no Eventi istantanei Eventi a distanza sempre più ravvicinata Eventi che si svolgono e/o si evolvono in un intervallo di tempo Eventi che devono aspettare input dallesterno Latenze in informatica musicale Interpretazione legata alle durate (es. doppio click)
.")
8
Il problema cruciale: linterpretazione Riconoscimento di comportamento

9
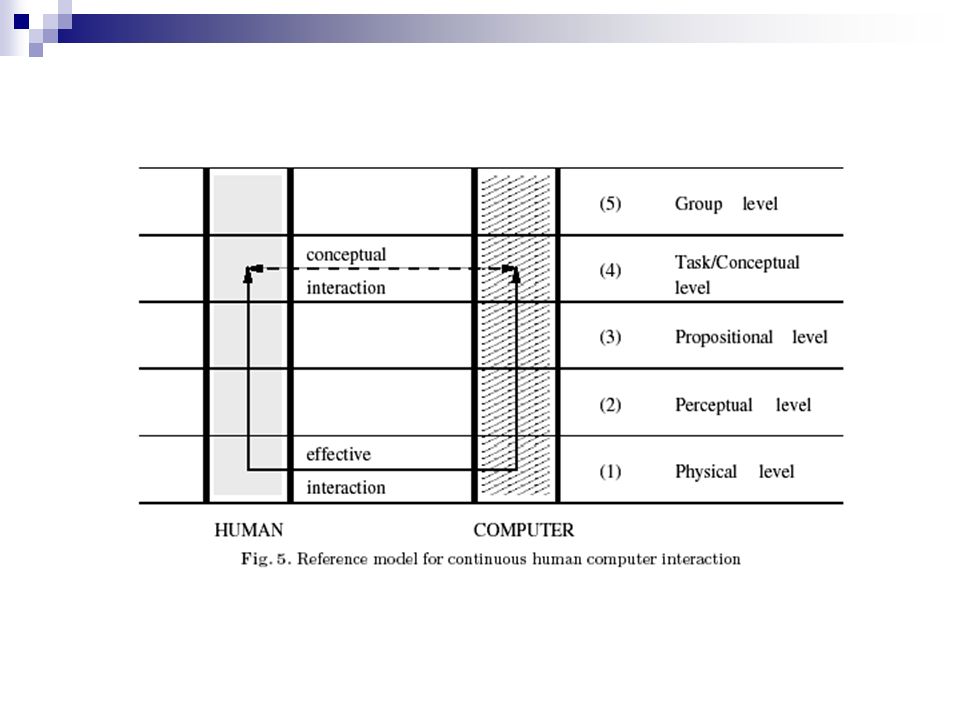
Una possibile soluzione: diversi livelli di astrazione Mieke Massink Giorgio P. Faconti, A reference framework for continuous interaction UAIS, 1 (2002) 237-251 http://www.springerlink.com/index/10.1007/s10209-002-0027-5 fisico percettivo proposizionale concettuale di gruppo Linee guida per disegnare interfacce ibride continue
 fisico percettivo proposizionale concettuale di gruppo Linee guida per disegnare interfacce ibride continue.")
11
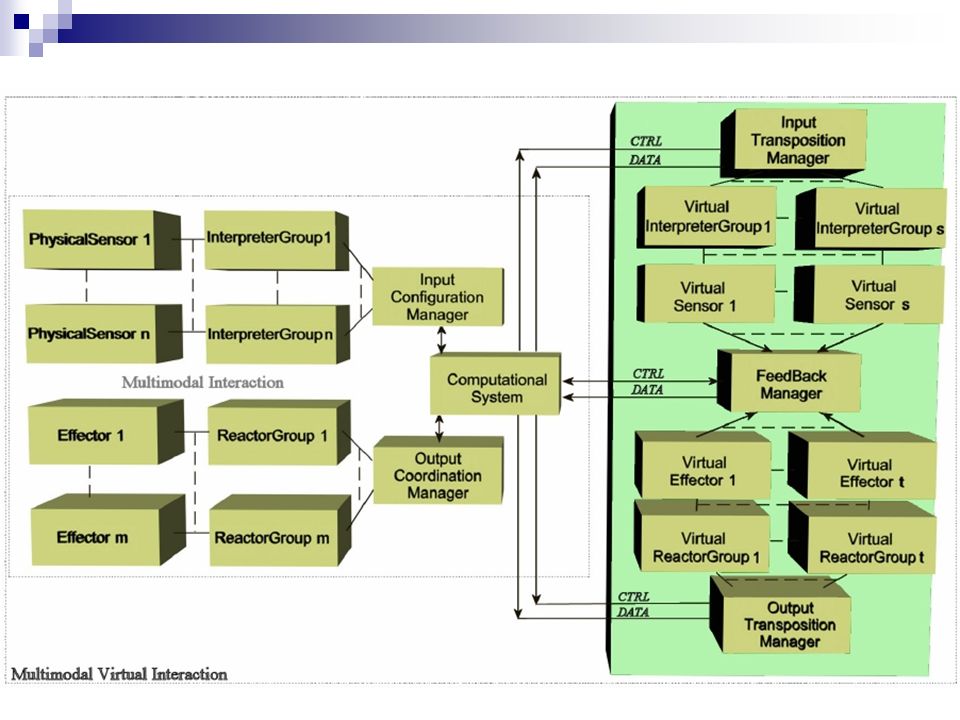
Gestire linterazione trasformando linformazione dai sensori agli effettori Philip Barnard, Jon May, David Duke, David Duce Systems, interactions, and macrotheory ACM TOCHI,7 (2000) 222--262 http://doi.acm.org/10.1145/353485.353490
")
13
Gli automi ibridi Una soluzione? Automa ibrido X n-uple di variabili reali, (V,E) grafo di controllo, modalità ed interruttori init, inv, flow condizioni che etichettano le modalità jump condizione che etichetta gli interruttori eventi Thomas A. Henzinger, The Theory of Hybrid Automata, Proc. 11th LICS Conf. (1996) 278-292
 grafo di controllo, modalità ed interruttori init, inv, flow condizioni che etichettano le modalità jump condizione che etichetta gli interruttori eventi Thomas A. Henzinger, The Theory of Hybrid Automata, Proc. 11th LICS Conf. (1996)")
14
Gli automi ibridi Una soluzione? Sistema di transizione temporizzato Q,Q 0 V Rn, (v,x) Q sse inv(v)[X:=x] vero (v,x) Q 0 sse inv(v)[X:=x] e init(v)[X:=x] veri A= R + eventi e durate :(v,x) (v,x) sse cè e E v v jump(e)[X,X:=x,x] event(e)= :(v,x) (v,x) sse cè f:[0, ] R n differenziabile f(0) = x f( ) = x inv(v) [x:= f( ) ] 0 flow(v ) [x, := f( ), f( )] veri Thomas A. Henzinger, The Theory of Hybrid Automata, Proc. 11th LICS Conf. (1996) 278-292.x.x
 Q sse inv(v)[X:=x] vero (v,x) Q 0 sse inv(v)[X:=x] e init(v)[X:=x] veri A= R + eventi e durate :(v,x) (v,x) sse cè e E v v jump(e)[X,X:=x,x] event(e)= :(v,x) (v,x) sse cè f:[0, ] R n differenziabile f(0) = x f( ) = x inv(v) [x:= f( ) ] 0 flow(v ) [x, := f( ), f( )] veri Thomas A. Henzinger, The Theory of Hybrid Automata, Proc. 11th LICS Conf. (1996) x.x.")
15
Esempio: un termostato off on = - 0,1 x = 5- 0,1 x x18 x22 x=20 x>21 x<19.x.x.x.x

16
Marionette virtuali

17
Il sistema Allesterno è un processo veramente continuo, almeno a tratti, che viene rilevato secondo certi intervalli di tempo dai sensori. Questi innescano delle procedure allinterno costanti, ma su intervalli di tempo reali (almeno in prima approssimazione). Esistono uno o più sistemi temporali sia interni che esterni.
. Esistono uno o più sistemi temporali sia interni che esterni..")
18
Descrizione del sistema interno

19
Usare soltanto durate e corrispondenze temporali Non ci domandiamo perché e come accadano certe transizioni, Ma le osserviamo

20
Osservabilità e nondeterminismo Un processo può essere descritto osservando il suo comportamento dallesterno. Non è detto che la stessa osservazione porti nello stesso stato È suggerita una struttura ad albero a bc d a bc

21
La nozione di processo a.P a P P i a Q i P 1 +P 2 a Q i ed altri operatori…..

22
Il tempo discreto N 0 1 3 2 4 A = {a,b,c,d,…} aacb

23
Alberi discreti N 0 1 3 2 Set

24
Il tempo continuo a gradini A = {a,b,c,d,…} (a,r 1 ) (a,r 2 - r 1 ) (c, r 3 - r 2 ) (b, r 4 - r 3 ) R+R+ 0 r1r1 r2r2 r3r3 r4r4
 (a,r 2 - r 1 ) (c, r 3 - r 2 ) (b, r 4 - r 3 ) R+R+ 0 r1r1 r2r2 r3r3 r4r4")
25
Il tempo continuo F = {f,g,h,k,…} (f |r 1 ) (f |r 2 - r 1 ) (h |r 3 - r 2 ) (g |r 4 - r 3 ) R+R+ 0 r1r1 r2r2 r3r3 r4r4
 (f |r 2 - r 1 ) (h |r 3 - r 2 ) (g |r 4 - r 3 ) R+R+ 0 r1r1 r2r2 r3r3 r4r4")
26
Alberi continui Set R+R+ 0 r1r1 r2r2 r3r3 r4r4

27
Le categorie di alberi Un albero è un insieme di cammini etichettati ed incollati lungo unetichetta che è un prefisso comune. Questo significa che, a sua volta un albero è una categoria arricchita su una 2-categoria localmente posetale L Un morfismo di L-alberi è un L-funtore: una funzione tra cammini che rispetta strettamente letichettatura e può far crescere lincollamento, cioè una simulazione che tende a diminuire il non determinismo

28
Esempi di 2-categorie di base: le strutture temporali A* monoide libero sullalfabeto A, funzioni parziali da N ad A CA funzioni parziali costanti a gradino da R + ad A CF funzioni parziali continue a tratti TA monoide a tracce, ecc. In generale: L monoide che sia anche un inf-semireticolo Più in generale sistemi di tracce con rendez-vous (vedremo più avanti)
.")
29
t = (X, e, d) : i. un insieme di cammini: X ii. una funzione etichettatura e: X L, ii. una funzione incollamento d : X X L t.c. per ogni x, y, z in X, - d (x, x) = e(x) - d(x, y) e (x) e (y) - d(x, y) d(y, z) d(x, z) - d (x, y) = d (y, x) Gli alberi su L
 = e(x) - d(x, y) e (x) e (y) - d(x, y) d(y, z) d(x, z) - d (x, y) = d (y, x) Gli alberi su L.")
30
Un morfismof : t 1 t 2 è una funzione f : X 1 X 2 tale che i. e 2 (f(x)) = e 1 (x) ii. d 1 (x, y) d 2 (f(x), f(y))
) = e 1 (x) ii. d 1 (x, y) d 2 (f(x), f(y)).")
31
a c bc b b a a bc c b a a Il caso L=A* Si etichetta con A* e si incolla per prefisso

32
Operazioni tra alberi Somma: t 1 + t 2 =, dove - X = X 1 X 2 - e (x 1 ) = e 1 (x 1 ) - e (x 2 ) = e 2 (x 2 ) d i (x, y) se x, y X i - d ( x, y) = altrimenti 0 = è lunità
 = e 1 (x 1 ) - e (x 2 ) = e 2 (x 2 ) d i (x, y) se x, y X i - d ( x, y) = altrimenti 0 = è lunità")
33
Esempio

34
Operazioni tra alberi Concatenazione: t 1 t 2 =, dove - X = X 1 X 2 - e ( ) = e 1 (x 1 ). e 2 (x 2 ) d 1 (x 1, y 1 ).d 2 (x 2, y 2 ) se x 1 = y 1 - d (, ) = d 1 (x 1, y 1 ) altrimenti 1 = is lelemento neutro Tree(A) monoidale chiusa a destra La concatenazione distribuisce a destra sulla somma
 d 1 (x 1, y 1 ).d 2 (x 2, y 2 ) se x 1 = y 1 - d (, ) = d 1 (x 1, y 1 ) altrimenti 1 = is lelemento neutro Tree(A) monoidale chiusa a destra La concatenazione distribuisce a destra sulla somma.")
35
Esempio

36
Etichettatura con funzioni a gradino Si incolla per prefisso Il tempo continuo CA

37
Etichettatura con tracce di Mazurkiewicz: A*/I Parole con possibilità di invertire certe lettere [a,b] Il tempo non completamente ordinato c b [a,b] c
![Etichettatura con tracce di Mazurkiewicz: A*/I Parole con possibilità di invertire certe lettere [a,b] Il tempo non completamente ordinato c b [a,b] c](http://images.slideplayer.it/1/570378/slides/slide_37.jpg "Etichettatura con tracce di Mazurkiewicz: A*/I Parole con possibilità di invertire certe lettere [a,b] Il tempo non completamente ordinato c b [a,b] c")
38
Sincronizzazione e fusione Tempo globale: Sincronizzazione Tempi relativi: Rendez-vous

39
Sincronizzazione Definiamo una tabella di sincronizzazione per coppie di mosse contemporanee e costruiamo lalbero che viene etichettato con i risultati. La sicronizzazione può essere: handshaking, a braccetto, ecc. t 1 t 2 =, dove - X X 1 X 2 - e ( ) = e 1 (x 1 ) * e 2 (x 2 ) - d (, ) = (e 1 (x 1 ) * e 2 (x 2 )) (e 1 (y 1 ) * e 2 (y 2 )) Tagliato eventualmente alla lunghezza minima tra d 1 (x 1, y 1 ) e d 2 (x 2, y 2 ) altrimenti
 = e 1 (x 1 ) * e 2 (x 2 ) - d (, ) = (e 1 (x 1 ) * e 2 (x 2 )) (e 1 (y 1 ) * e 2 (y 2 )) Tagliato eventualmente alla lunghezza minima tra d 1 (x 1, y 1 ) e d 2 (x 2, y 2 ) altrimenti.")
40
Esempio d b a a a a b c d d a b a

41
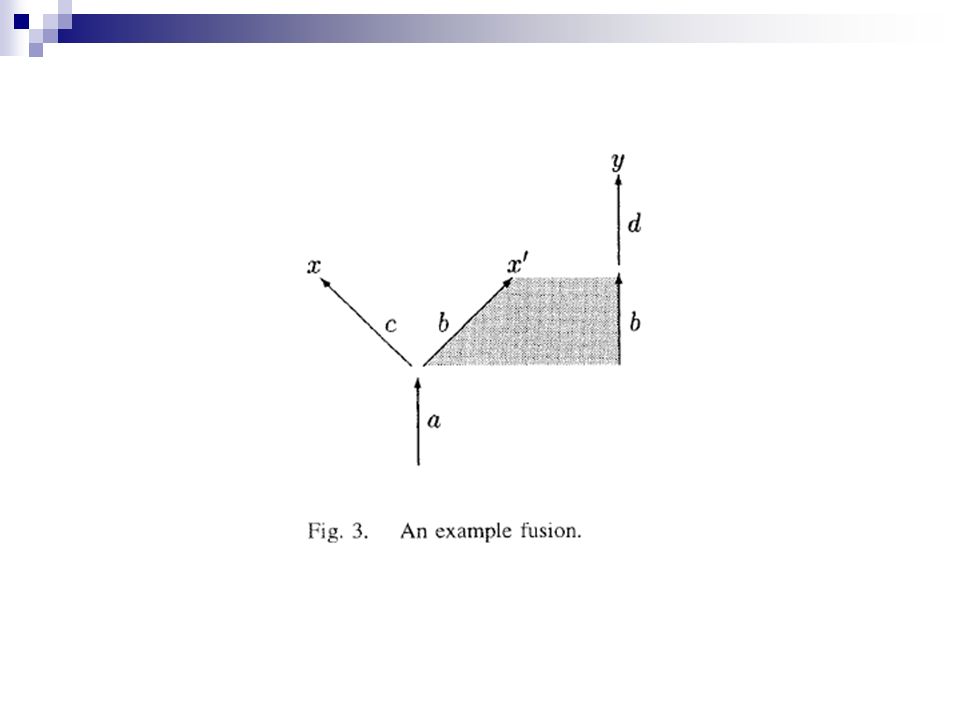
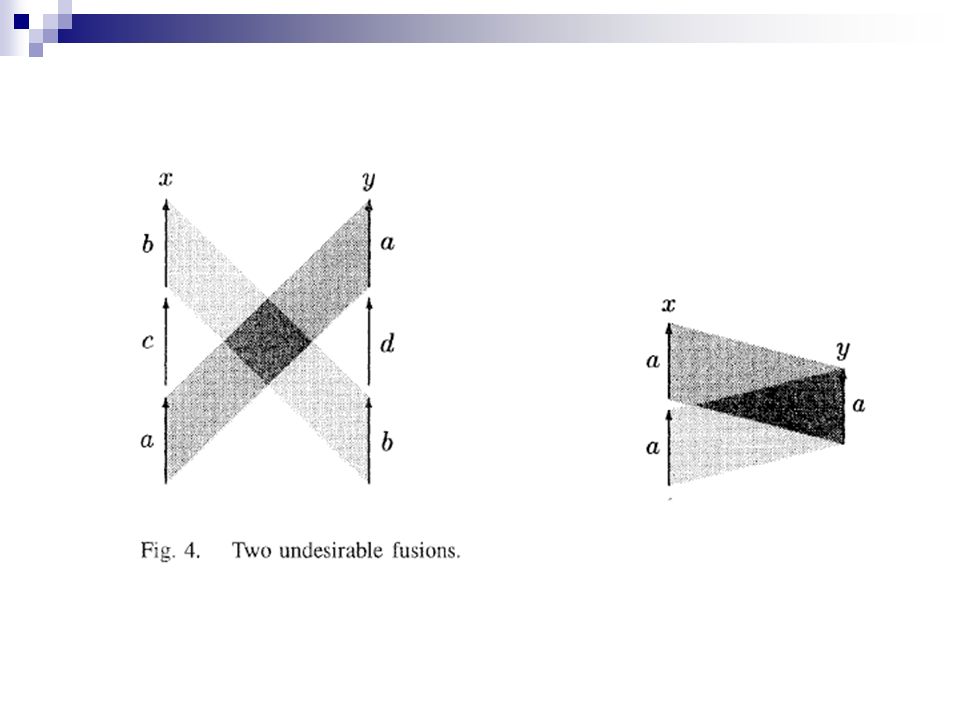
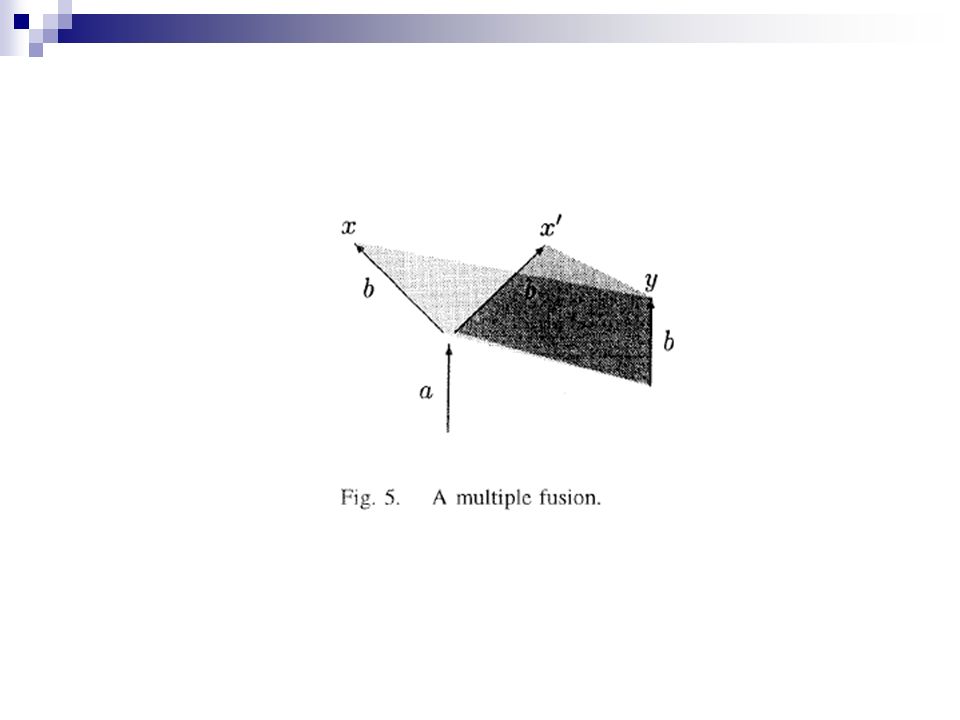
Fusione Etichettatura sui prefissi, ma incollamento su opportuni sottoinsiemi: Ogni sottoprocesso ha il suo tempo

42
Una nuova struttura di base A N Si etichetta ancora con le parole di A*, ma non si incolla per prefisso

43
Due cammini x e y e(x) = abac, cioè {(1,a),(2,b),(3,a),(4,c) } e(y) = cbabb, cioè {(1,c),(2,b),(3,a),(4,b),(5,b)} a(x,y) = {(3,a)}. Thread o dendroide

44
(X, e, d) (X, e, d) : i. un insieme di cammini: X X ii. una funzione etichettatura e e: X X A *, NN ii. una funzione incollamento : X X A NN t.c. per ogni x, y in X, x, y in X - (x,x) s.i. consistente di e(x) e di e(x) - d (y, x) (x,x) (y,x) - (x,x) d(x, y) (x,y) - (x, x) = (x, x) Fusione tra alberi (caso discreto)
 s.i. consistente di e(x) e di e(x) - d (y, x) (x,x) (y,x) - (x,x) d(x, y) (x,y) - (x, x) = (x, x) Fusione tra alberi (caso discreto).")
45
Notare lanalogia con la nozione di albero In realtà sono cambiate soltanto le frecce della categoria di base: Gli oggetti continuano ad essere prefissi, le frecce sono soltanto insiemi consistenti x y e(x)e(y) a(x,y)
e(y) a(x,y)")
49
Arricchimenti doppi Coesistenza di due tipi di tempo Loro sincronizzazione per prefisso

50
Caso di comportamento ibrido t = (X, e, d) : i. un insieme di cammini: X ii. una funzione etichettatura e: X CF CA, cioè e - : X CF ed e + : X CA iii. per ogni x, y in X una funzione incollamento monotona d x,y : [e - (x), e - (y) ] [e + (x), e + (y) ] t.c. per ogni x, y, z in X, -d x,x [e - (x), e - (x) ] [e + (x), e + (x) ] rispetta il massimo - d(x, y) e (x) e (y) - d x,y d y,z d x,z - d x,y = d y,x
, e - (y) ] [e + (x), e + (y) ] t.c. per ogni x, y, z in X, -d x,x [e - (x), e - (x) ] [e + (x), e + (x) ] rispetta il massimo - d(x, y) e (x) e (y) - d x,y d y,z d x,z - d x,y = d y,x.")
51
Attenzione! la situazione non è simmetrica rispetto alle due etichettature Da una parte dobbiamo prendere tutti i prefissi comuni, dallaltra no: questo vuol dire che abbiamo nondeterminismo soltanto a destra. Si potrebbe generalizzare prendendo relazioni al posto di funzioni

52
Esempio x d x,x [e - (x), e - (x) ] [e + (x), e + (x) ] potrebbe essere indotta dalla funzione sugli istanti di tempo {r i } {s i }, così d x,y [e - (x), e - (y) ] [e + (x), e + (y) ] e - (x) = (f |r 1 ) (f |r 2 - r 1 ) (h |r 3 - r 2 ) (g |r 4 - r 3 ) e + (x) = (a,s 1 ) (a,s 2 - s 1 ) (c, s 3 - s 2 ) (b, s 4 - s 3 ) e - (x) e + (x) e - (y) = (f |r 1 ) (f |r 2 - r 1 ) (h |r 3 - r 2 ) (k |r 4 - r 3 ) e + (y) = (a,s 1 ) (a,s 2 - s 1 ) (c, s 3 - s 2 ) (d, s 4 - s 3 ) y e - (y) e + (y)
![Esempio x d x,x [e - (x), e - (x) ] [e + (x), e + (x) ] potrebbe essere indotta dalla funzione sugli istanti di tempo {r i } {s i }, così d x,y [e - (x), e - (y) ] [e + (x), e + (y) ] e - (x) = (f |r 1 ) (f |r 2 - r 1 ) (h |r 3 - r 2 ) (g |r 4 - r 3 ) e + (x) = (a,s 1 ) (a,s 2 - s 1 ) (c, s 3 - s 2 ) (b, s 4 - s 3 ) e - (x) e + (x) e - (y) = (f |r 1 ) (f |r 2 - r 1 ) (h |r 3 - r 2 ) (k |r 4 - r 3 ) e + (y) = (a,s 1 ) (a,s 2 - s 1 ) (c, s 3 - s 2 ) (d, s 4 - s 3 ) y e - (y) e + (y)](http://images.slideplayer.it/1/570378/slides/slide_52.jpg "Esempio x d x,x [e - (x), e - (x) ] [e + (x), e + (x) ] potrebbe essere indotta dalla funzione sugli istanti di tempo {r i } {s i }, così d x,y [e - (x), e - (y) ] [e + (x), e + (y) ] e - (x) = (f |r 1 ) (f |r 2 - r 1 ) (h |r 3 - r 2 ) (g |r 4 - r 3 ) e + (x) = (a,s 1 ) (a,s 2 - s 1 ) (c, s 3 - s 2 ) (b, s 4 - s 3 ) e - (x) e + (x) e - (y) = (f |r 1 ) (f |r 2 - r 1 ) (h |r 3 - r 2 ) (k |r 4 - r 3 ) e + (y) = (a,s 1 ) (a,s 2 - s 1 ) (c, s 3 - s 2 ) (d, s 4 - s 3 ) y e - (y) e + (y)")
53
La nozione di stato La logica associata Ulteriori possibilità del modello

54
Il caso degli alberi a bc c b a a Ogni nodo è uno stato

55
Il caso dei dendroidi Non ogni nodo è uno stato

56
A che servono i metodi formali?

57
Servono a capire

58
Vengono prima o dopo la pratica? Si intercalano

Presentazioni simili










 11/6/2008.>")








