Scaricare la presentazione
1
DETERMINAZIONE SPERIMENTALE DELLA PRONTEZZA

2
Taratura dinamica: I step: Identificazione (t, wn, h) II step: Taratura per confronto (riferibilità)
 II step: Taratura per confronto (riferibilità)")
3
Si studia la risposta degli strumenti ad ingressi semplici.
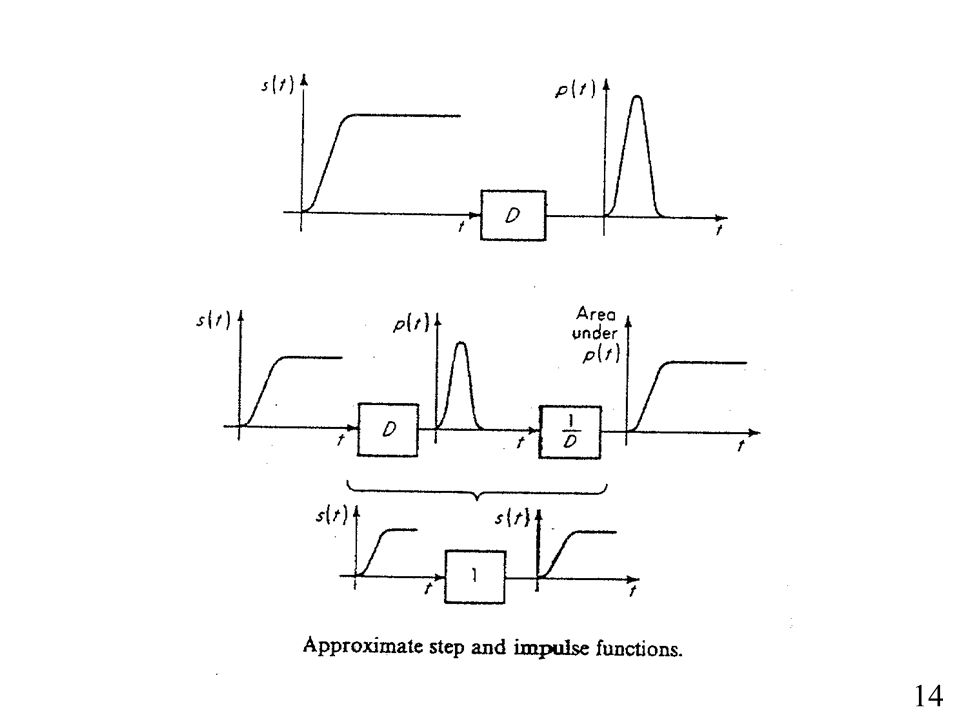
Tali ingressi semplici sono quelli già citati, ossia l’impulso, il gradino, la rampa, la sinusoide… La scelta del tipo di segnale da impiegare è dettata per lo più dalla comodità e dalla semplicità operativa: talvolta si è impossibilitati a fornire certi segnali semplici (ad es. l’impulso) perché potrebbero danneggiare lo strumento. Va inoltre ricordato che per certi segnali, ossia gradino e rampa, la situazione reale è sempre diversa da quella ideale: sarebbe infatti richiesta energia infinita per poter fornire un impulso o un gradino ideali. Dal momento che sin qui si è privilegiata l’analisi armonica, si fornisce qualche elemento in più sui citati segnali semplici
 perché potrebbero danneggiare lo strumento. Va inoltre ricordato che per certi segnali, ossia gradino e rampa, la situazione reale è sempre diversa da quella ideale: sarebbe infatti richiesta energia infinita per poter fornire un impulso o un gradino ideali. Dal momento che sin qui si è privilegiata l’analisi armonica, si fornisce qualche elemento in più sui citati segnali semplici.")
4
Sinusoide: tutta l’energia a disposizione viene fornita ad una sola frequenza.
0.058 0.062 0.066 0.07 0.074 0.078 -1 -0.5 0.5 1 500 1000 1500 2000 2500 0.2 0.4 0.6 0.8 Hz s

5
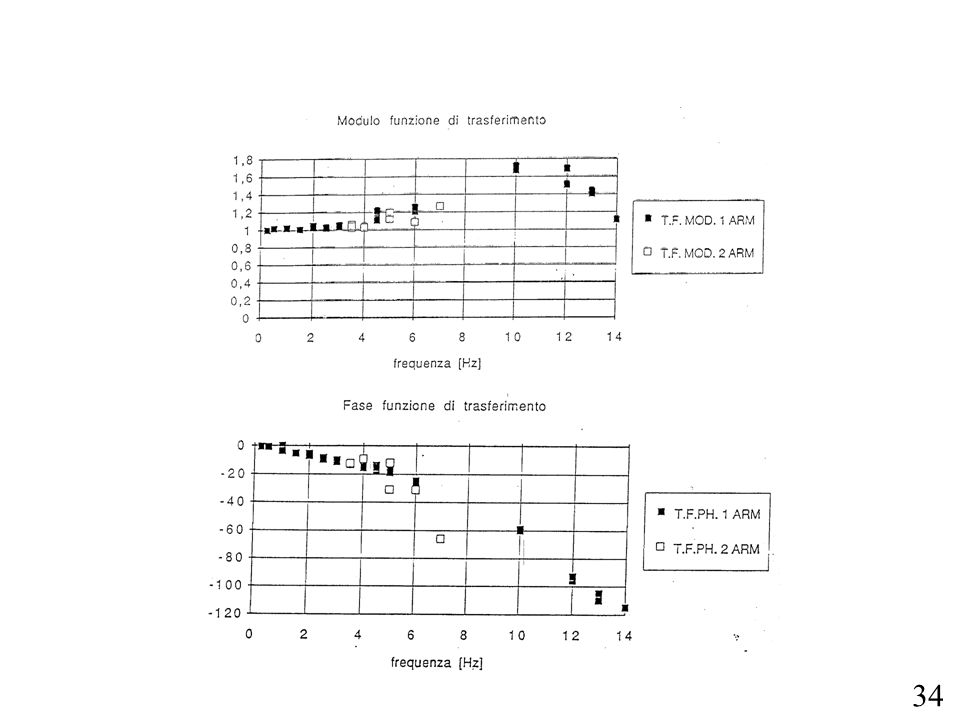
Valutare la risposta in frequenza significa dunque in questo caso fornire un ingresso sinusoidale di ampiezza nota e frequenza variabile pure nota e costruire per punti la funzione di trasferimento armonica Diverse prove 40 80 120 160 200 0.2 0.4 0.6 0.8 100 TF Mod Hz TF Pha Hz

6
Storia temporale Spettro
Impulso ideale: l’energia viene ripartita in UGUALE MANIERA su tutte le frequenze da f=0 a f=+. Ovviamente l’energia distribuita su ciascuna frequenza è minore rispetto al caso della sinusoide 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0.4 0.6 0.8 1 500 1000 1500 2000 2500 3000 0.5 2 1.5 4 x 10 -3 Storia temporale s Spettro Hz

7
L’impulso ideale ha un grosso pregio: consente infatti di valutare molto rapidamente la risposta in frequenza consentendo in breve tempo di sondare il comportamento dello strumento in un ampio campo di frequenze. Teoricamente poi, siccome l’energia in ingresso è equamente ripartita su tutte le frequenze, sarebbe in teoria possibile valutare la prontezza dello strumento semplicemente guardando la risposta, senza la necessità di valutare la funzione di trasferimento. Perché la prova abbia un senso è necessario mediare più risposte all’impulso, in modo da mantenere la parte deterministica di segnale abbattendo il rumore aleatorio. Un limite all’impiego dell’impulso è la bassa energia fornita in corrispondenza di ciascuna frequenza

8
L’impulso ideale tuttavia non è il solo tipo di segnale a presentare uno spettro con ampiezza costante al variare della frequenza; un altro segnale con questo spettro (e quindi con gli stessi pregi) è il rumore bianco, ossia un segnale assolutamente casuale: in un determinato istante t non è possibile fare alcuna previsione sull’andamento del segnale all’istante t +Dt. Tuttavia è necessario mediare più spettri di rumore per avere realmente uno spettro “piatto” al variare della frequenza.

9
Rumore bianco Storia temporale Spettro s Hz 0.5 1 1.5 2 2.5 -0.5 20 40
0.5 1 1.5 2 2.5 -0.5 20 40 60 80 100 0.01 0.02 0.03 0.04 Storia temporale s Spettro Hz

10
Rumore bianco: effetto di 128 medie
20 40 60 80 100 0.01 0.02 0.03 0.04 1 spettro s 128 medie Hz

11
Il caso reale però è diverso, in quanto mentre è possibile realizzare qualcosa di simile ad un rumore bianco almeno in una certa banda di frequenze, più difficile è produrre un impulso che si avvicini al reale: le strutture reali si comportano da “filtro” cancellando di fatto i contributi a più alta frequenza Sono forniti i diagrammi relativi a due impulsi reali, uno elettrico ed uno meccanico, prodotto da un martello dotato di testa in grado di misurare la forza scambiata tra martello e struttura (martello dinamometrico)
")
12
Storia temporale Spettro
Impulso elettrico: eccitazione nella banda Hz 0.04 0.08 0.12 0.16 0.2 -0.5 0.5 1 1.5 500 1000 1500 2000 2500 0.005 0.01 Storia temporale s Spettro Hz

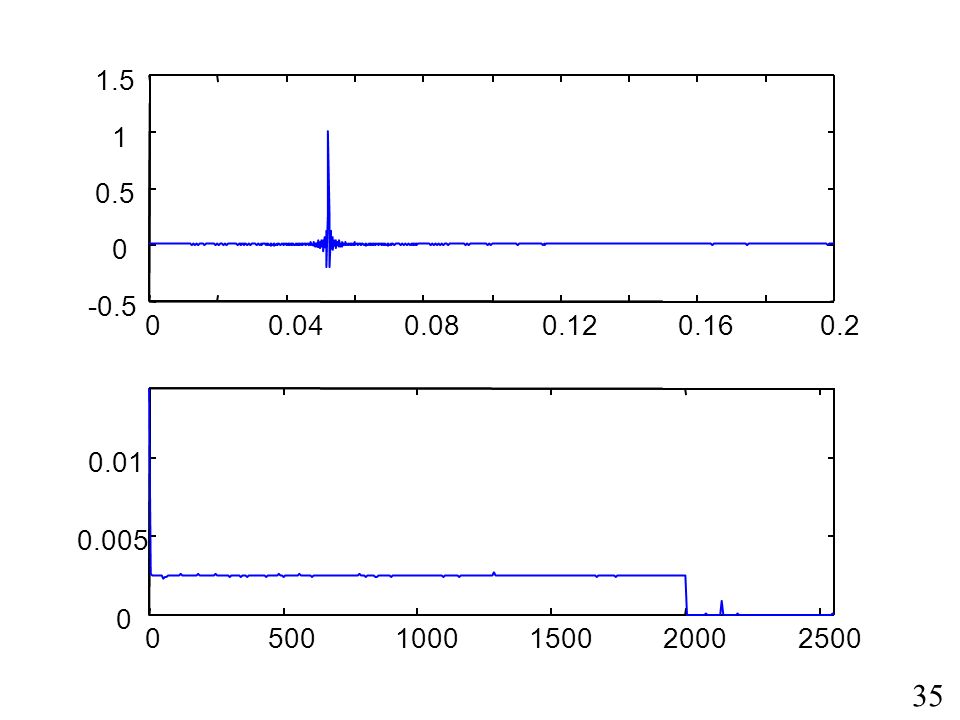
13
Impulso reale: martello dinamometrico
100 200 300 400 500 600 700 800 -20 20 40 60 80 s 100 200 300 400 500 600 700 0.1 0.2 0.3 0.4 500 1000 1500 2000 2500 3000 0.005 0.01 0.015 0.02 Hz Hz Effetto del diverso tipo di punta sulla banda passante

15
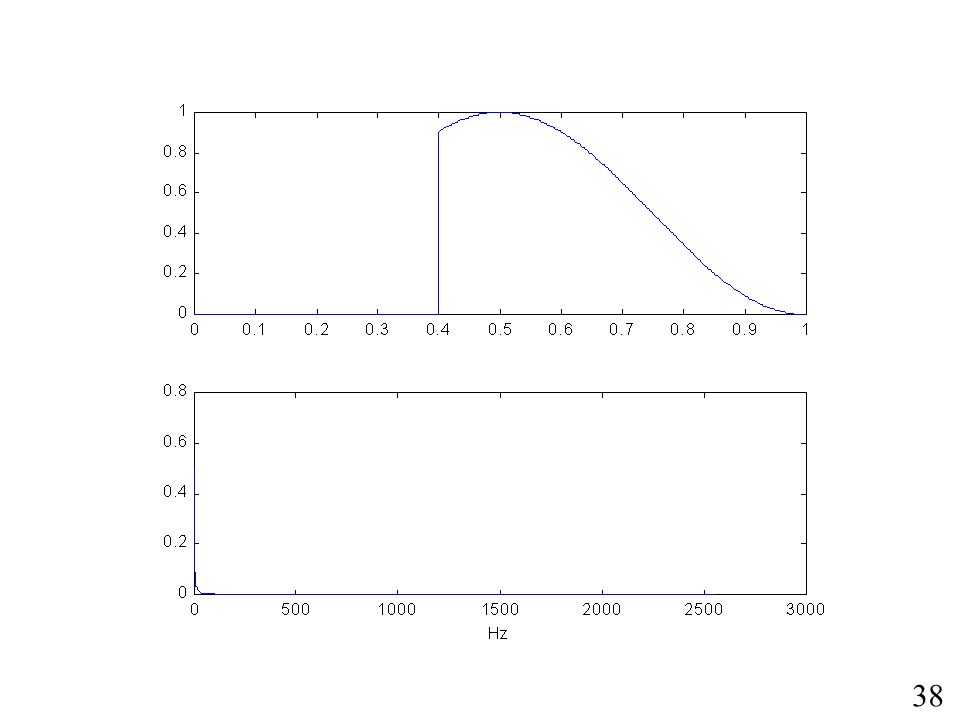
Altro tipico segnale utilizzato nella realtà è il cosiddetto sweep in frequenza, ossia un segnale sinusoidale ad ampiezza costante e frequenza variabile con velocità scelta dall’operatore. 0.04 0.08 0.12 0.16 0.2 -1 -0.5 0.5 1 1.5 500 1000 1500 2000 2500 0.01 0.02 0.03 0.05 Hz s tempo frequenza

16
Un’ultima possibilità offerta dai metodi di identificazione di parametri, sempre più diffusi e potenti, è quella di interpolare (ai minimi quadrati) i punti sperimentali con l’espressione che descrive il comportamento nel tempo di uno strumento del primo o del secondo ordine: il disegno della storia temporale ricostruita sopra ai punti sperimentali è indice della bontà dell’interpolazione e della scelta del tipo di modello adottato per lo strumento.
 i punti sperimentali con l’espressione che descrive il comportamento nel tempo di uno strumento del primo o del secondo ordine: il disegno della storia temporale ricostruita sopra ai punti sperimentali è indice della bontà dell’interpolazione e della scelta del tipo di modello adottato per lo strumento.")
17
1°ORDINE: il parametro da determinare è t.
Si tratta dunque di un problema di identificazione di parametri. Si applica un ingresso a gradino e t è il tempo impiegato per raggiungere il 63.2% del valore finale. 1 2 3 4 5 0.2 0.4 0.6 0.8 Problemi: incertezza nella determinazione di t=0; nessun controllo sul fatto che lo strumento sia davvero del primo ordine.

18
Per semplificare l’identificazione da un punto di vista sperimentale:
Si definisce Dunque Il vantaggio di questo modo di procedere è che il cambiamento di variabile porta i punti della risposta al gradino su di una linea retta. E’ dunque possibile utilizzare le routines di minimizzazione che riguardano la retta (più semplici).
.")
19
Passaggio ai logaritmi
Risposta al gradino Passaggio ai logaritmi

20
Si procede in questo caso sfruttando tutti i punti campionati ed operando un “best fitting”; il metodo del 63.2% sfrutta solo due punti ed è più impreciso Una procedura costosa, ma in genere sicura, è imporre ingressi sinusoidali a frequenza variabile, registrando input ed output. Se il sistema è proprio del primo ordine si avrà: Ove t=1/wbreak (rappresentazione con i logaritmi). Deviazioni da questo comportamento indicano che lo strumento non è del primo ordine
. Deviazioni da questo comportamento indicano che lo strumento non è del primo ordine.")
21
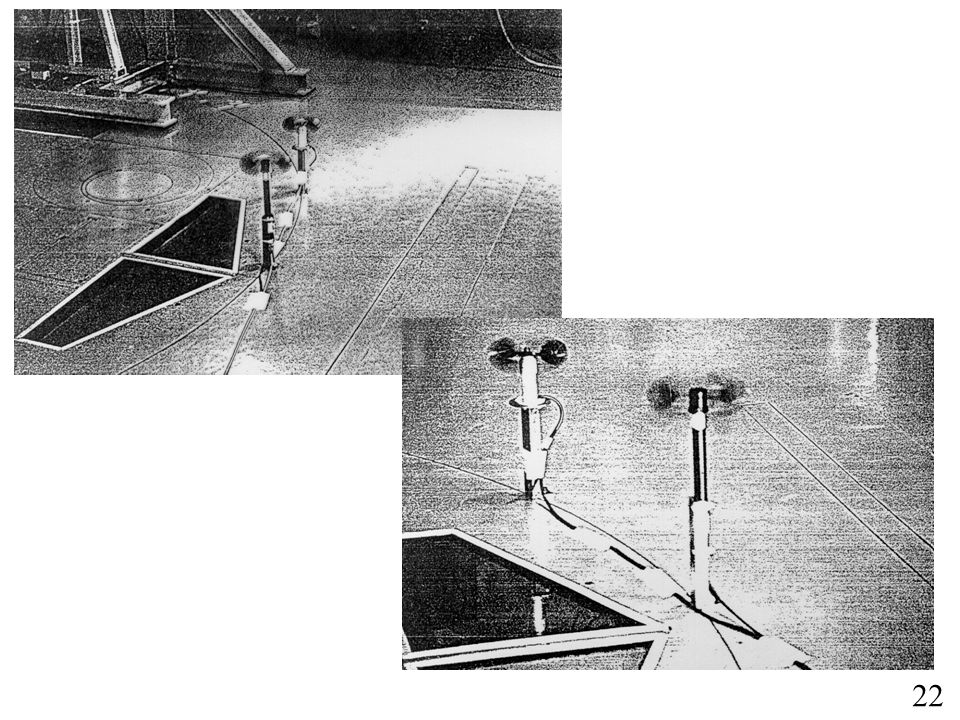
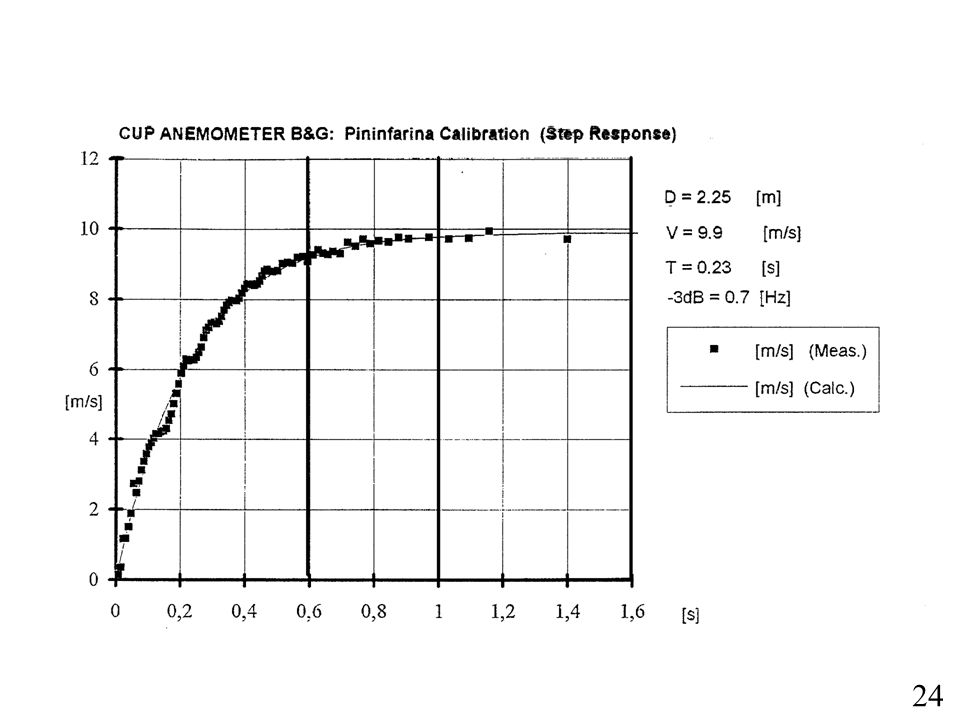
v ESEMPIO DI RISPOSTA DINAMICA: GRADINO PER UN ANEMOMETRO A COPPE
- Vento a regime e pale bloccate con un filo; - Si taglia il filo e si studia la risposta al gradino Sia V0 la velocità a regime: Ci si accorge che la risposta è tipica di uno strumento del primo ordine: - interessa ricavare t - sono note le coppie di valori t-v

23
I Ordine Si pone

25
Con il procedimento di minimizzazione ai minimi quadrati (fare per verifica che si sia capito) si arriva a dimostrare che: ossia è la media aritmetica dei t ottenuti deterministicamente.

26
STRUMENTI DEL SECONDO ORDINE
Anche in questo caso è possibile tracciare per punti la risposta in frequenza ed interpolare con le espressioni analitiche della risposta, in questo caso, di uno strumento del secondo ordine. L’identificazione di wn e h avviene così in modo automatico. Esempi di identificazione di h e wn: risposta al gradino dopo un transitorio il moto è libero smorzato %overshoot h

27
Esempi di identificazione di h e wn: risposta all’impulso dopo un transitorio: smorzamento piccolo
INPUT OUTPUT E’ meglio lavorare su più cicli e non su uno solo. Tuttavia, se h varia col numero di cicli, il sistema non è lineare.

28
Più che proseguire in un’ovvia elencazione di risposte a segnali semplici, già viste per via teorica, in cui l’identificazione di parametri è comunque il problema fondamentale, si riportano alcuni esempi relativi a strumenti del secondo ordine. ESEMPIO: trasduttore di pressione Ai fini della prontezza conta sia il trasduttore che il tubo che lo connette al punto di misura.

29
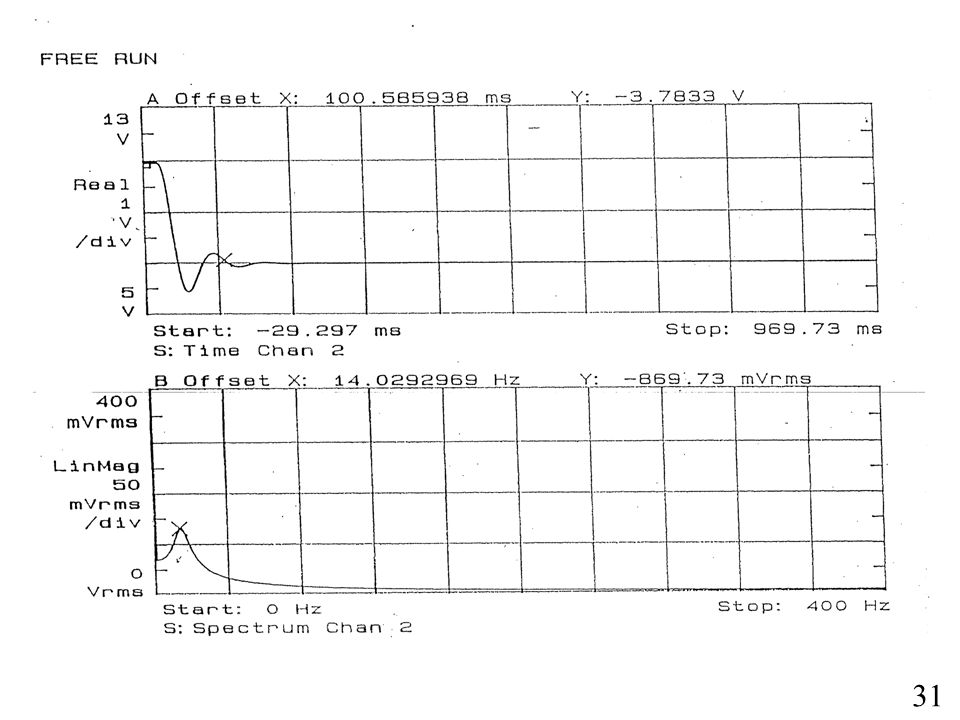
[V] Risposta al gradino del trasduttore di pressione
40 80 120 160 200 -1.5 -1 -0.5 0.5 1 1.5 Time [ms] [V] Risposta al gradino del trasduttore di pressione trasd serb Identificazione di parametri effettuata per mezzo di un ‘best fitting’ dei punti acquisiti con la risposta teorica di uno strumento del secondo ordine 0.02 0.04 0.06 0.08 0.1 -1 -0.5 0.5 1 1.5 Time [ms] [V] Storia sperimentale Ricostruzione
![[V] Risposta al gradino del trasduttore di pressione](http://slideplayer.it/slide/573274/1/images/29/%5BV%5D+Risposta+al+gradino+del+trasduttore+di+pressione.jpg "Time [ms] [V] Risposta al gradino del trasduttore di pressione. trasd. serb. Identificazione di parametri effettuata per mezzo di un ‘best fitting’ dei punti acquisiti con la risposta teorica di uno strumento del secondo ordine Time [ms] [V] Storia sperimentale. Ricostruzione.")
30
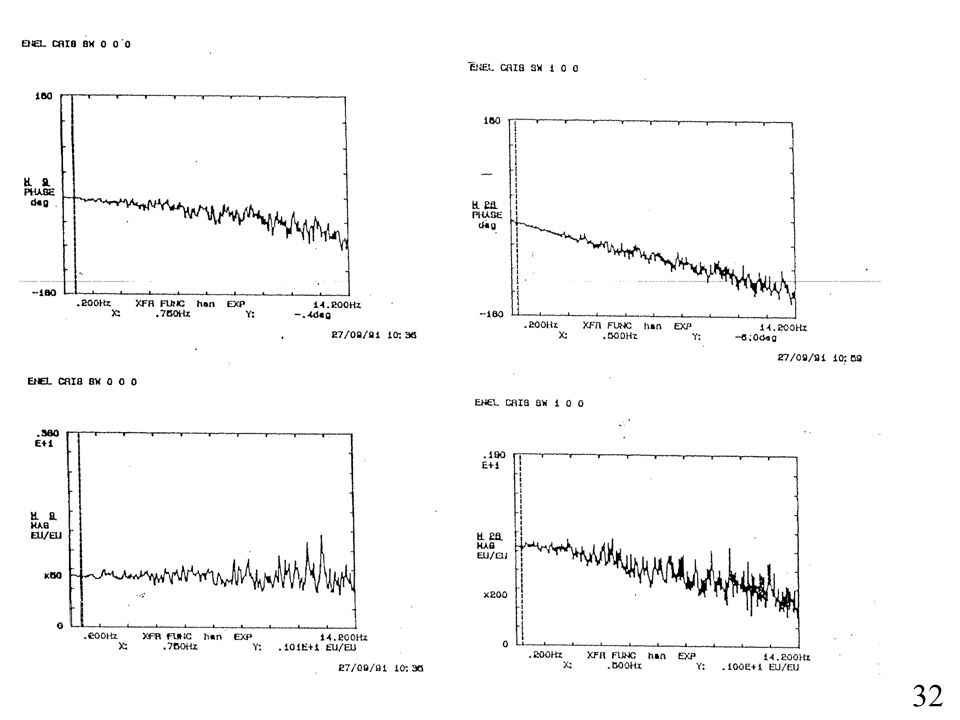
Altro tipo di indagine: stesso gradino a due trasduttori uno già tarato dinamicamente e pronto per il campo di frequenze di interesse. trasd serb RIF.

33
Funzione di trasferimento armonica in galleria del vento
trasd serb RIF.

35
1.5 1 0.5 -0.5 0.04 0.08 0.12 0.16 0.2 0.01 0.005 500 1000 1500 2000 2500
36
8 6 4 2 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 0.02 0.015 0.01 0.005 500 1000 1500 2000 2500 3000 Hz

37
1 0.5 -0.5 -1 0.04 0.08 0.12 0.16 0.2 0.02 0.01 500 1000 1500 2000 2500








>")











>")
 ad ogni istante di tempo t sono v.a. Notazione: X : insieme di.>")