Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
MACCHINE IN CC: STRUTTURA GENERALE
Sistema induttore: poli sporgenti, disposti sullo statore, dotati di un avvolgimento concentrato dove circola la corrente cc che genera il campo magnetico (corrente di eccitazione, ie(t)). Il campo magnetico è di tipo statico se la eccitazione rimane costante (Ie). Il suo percorso riguarda i poli di eccitazione, il traferro, i denti di rotore e le corone di statore e rotore.
). Il campo magnetico è di tipo statico se la eccitazione rimane costante (Ie). Il suo percorso riguarda i poli di eccitazione, il traferro, i denti di rotore e le corone di statore e rotore.")
2
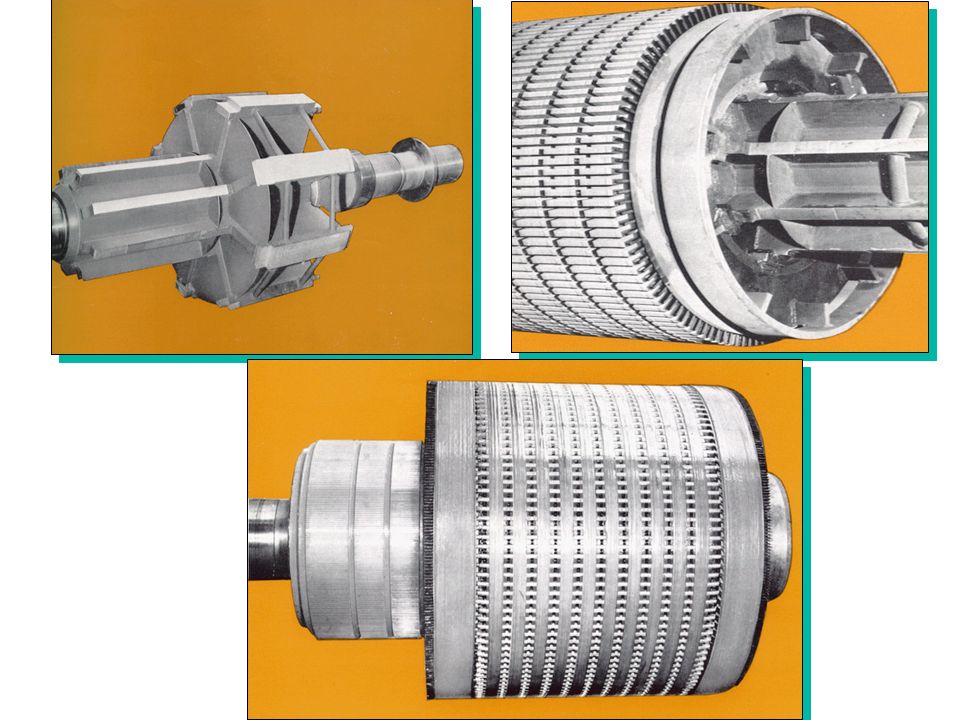
Il traferro ha uno spessore costante per ottenere un campo uniforme tra la scarpa polare ed il rotore. Sistema indotto: è costituito da una corona cilindrica di materiale ferromagnetico sulla periferia della quale sono stati praticati dei fori (cave) per l’alloggiamento degli avvolgimenti di rotore. Questi sono di tipo chiuso (non esiste un inizio o una fine). L’avvolgimento si muove, solidale con il rotore, nel campo magnetico generato dai poli. Su questi vengono indotti i fenomeni elettromagnetici (f.e.m.) che contribuiscono a generare la coppia motrice. Le estremità delle spire sono collegate al collettore. Il Collettore: è una struttura che ha il compito di collegare l’avvolgimento chiuso con il mondo esterno in modo tale da ottenere due o più vie interne di macchina dove fluisce la corrente assorbita dalla alimentazione esterna. È l’elemento chiave che distingue la macchina in CC dalle altre tipologie di macchina. Il Rotore: la struttura meccanica è composta dall’albero, i cuscinetti, appoggi, carcassa, collegamenti al sistema meccanico.
 per l’alloggiamento degli avvolgimenti di rotore. Questi sono di tipo chiuso (non esiste un inizio o una fine). L’avvolgimento si muove, solidale con il rotore, nel campo magnetico generato dai poli. Su questi vengono indotti i fenomeni elettromagnetici (f.e.m.) che contribuiscono a generare la coppia motrice. Le estremità delle spire sono collegate al collettore. Il Collettore: è una struttura che ha il compito di collegare l’avvolgimento chiuso con il mondo esterno in modo tale da ottenere due o più vie interne di macchina dove fluisce la corrente assorbita dalla alimentazione esterna. È l’elemento chiave che distingue la macchina in CC dalle altre tipologie di macchina. Il Rotore: la struttura meccanica è composta dall’albero, i cuscinetti, appoggi, carcassa, collegamenti al sistema meccanico.")
3
Il Sistema di Raffreddamento: sistema di ventole e tegoli per la gestione del fluido di raffreddamento. Con riferimento alla figura: 1) teste di avvolgimento di rotore; 2) anelli di tenuta di rotore; 3) circuito magnetico di rotore; 4) carcassa e circuito magnetico di statore; 5) espansioni polari; 6) avvolgimenti di eccitazione; 7) tenuta meccanica del polo; 8) ventola di raffreddamento; 9) spazzole e porta spazzole; 10) collettore;
 teste di avvolgimento di rotore; 2) anelli di tenuta di rotore; 3) circuito magnetico di rotore; 4) carcassa e circuito magnetico di statore; 5) espansioni polari; 6) avvolgimenti di eccitazione; 7) tenuta meccanica del polo; 8) ventola di raffreddamento; 9) spazzole e porta spazzole; 10) collettore;")
5
STRUTTURA DEI POLI PRINCIPALI

6
Sistema Induttore: L’ECCITAZIONE
è composto da poli magnetici sporgenti montati sullo statore, attorno ai quali è avvolto il circuito di eccitazione composto da Ne spire o da magneti permanenti. La alimentazione dell’avvolgimento di eccitazione può avvenire utilizzando una sorgente ausiliaria di CC o sfruttando il magnetismo residuo che il circuito magnetico conserva. Il circuito di eccitazione può essere così schematizzato: V Re Rp ie Le ve Ve: alimentazione in CC di ampiezza variabile. Rp: resistenza di protezione Re, Le: resistenza e il coeff di auto induzione del sistema di eccitazione

7
Il Circuito Elettrico di Eccitazione
Tramite il reostato si regola il livello di tensione ve(t) che alimenta la eccitazione in modo da far circolare la ie(t) che genera il campo elettrico. Se consideriamo la maglia della eccitazione, possiamo scrivere la equazione dinamica della eccitazione: A regime si ha: Dalla legge della circuitazione magnetica sappiamo che una corrente ie(t) che percorre un avvolgimento di Ne spire genera un campo magnetico pari a: Avente un flusso totale che è alla ie(t) nella ipotesi di linearità di che contiene la permeabilità, .
 che alimenta la eccitazione in modo da far circolare la ie(t) che genera il campo elettrico. Se consideriamo la maglia della eccitazione, possiamo scrivere la equazione dinamica della eccitazione: A regime si ha: Dalla legge della circuitazione magnetica sappiamo che una corrente ie(t) che percorre un avvolgimento di Ne spire genera un campo magnetico pari a: Avente un flusso totale che è alla ie(t) nella ipotesi di linearità di che contiene la permeabilità, .")
8
Il Campo Magnetico A regime, il campo magnetico è di tipo statico. Generato nel polo, il flusso principale esce dal polo nord, investe il circuito rotorico dove si divide in due sezioni, rientra dal polo sud ricomponendosi, per richiudersi nella corona di statore Lo statore, a parte eventualmente le espansioni dei poli principali, non è laminato perché interessato da un flusso costante nel tempo. Il rotore è costruito con materiale magnetico laminato perché sottoposto ad un flusso variabile con la rotazione. Il traferro, sotto le espansioni polari, è costante. Al traferro il flusso totale è: in condizioni di stazionarietà: =SpB

9
Andamento del Campo al Traferro
Se consideriamo lo sviluppo planare dello statore possiamo evidenziare meglio le caratteristiche del campo magnetico al traferro. La Ie che percorre l’eccitazione genera, al traferro una f.m.m di tipo rettangolare, fisso rispetto allo statore e di segno discorde (poli nord-sud). Il profilo della induzione cambia per la diversità del traferro tra spazi sotto-polari ed interpolari (+aria => maggiore riluttanza magnetica). L’andamento della induzione al traferro e quindi del flusso è uniforme sotto i poli (trascurando gli effetti di bordo).
. Il profilo della induzione cambia per la diversità del traferro tra spazi sotto-polari ed interpolari (+aria => maggiore riluttanza magnetica). L’andamento della induzione al traferro e quindi del flusso è uniforme sotto i poli (trascurando gli effetti di bordo).")
10
Scelta del Punto di Lavoro
Il punto di lavoro del campo si determina fissando un valore per la tensione di eccitazione e per la resistenza di protezione del circuito di eccitazione. A regime, Ie=Ve/(Rp+Re). A cui corrisponde una f.m.m. H=NeIe/L ed un valore di induzione al traferro, B0, rilevata sulla curva di magnetizzazione del lamierino scelto. Nota il valore della superficie del polo, Sp, si conosce il valore del flusso totale . Il campo può essere regolato modificando la ie ovvero agendo su ve o Rp. Trascurando le variazioni del flusso, si ha la equazione che regola i transitori: Br B HIe B0 H
. A cui corrisponde una f.m.m. H=NeIe/L. ed un valore di induzione al traferro, B0, rilevata sulla curva di magnetizzazione del lamierino scelto. Nota il valore della superficie del polo, Sp, si conosce il valore del flusso totale . Il campo può essere regolato modificando la ie ovvero agendo su ve o Rp. Trascurando le variazioni del flusso, si ha la equazione che regola i transitori: Br. B. HIe. B0. H.")
11
Le Ipotesi di Campo Il circuito magnetico del rotore è attraversato dal flusso (metà flusso per settore circolare). La struttura è tale che l’ipotesi di uniformità e stazionarietà può essere, in prima approssimazione, mantenuta (le aperture delle cave perturbano il campo). Se Ie è costante, il campo magnetico può essere considerato uniforme sia nel circuito magnetico che nel traferro, sotto le scarpe polari. Gli avvolgimenti di rotore (sistema indotto) sono immersi quindi in un campo uniforme
. La struttura è tale che l’ipotesi di uniformità e stazionarietà può essere, in prima approssimazione, mantenuta (le aperture delle cave perturbano il campo). Se Ie è costante, il campo magnetico può essere considerato uniforme sia nel circuito magnetico che nel traferro, sotto le scarpe polari. Gli avvolgimenti di rotore (sistema indotto) sono immersi quindi in un campo uniforme.")
12
Le Forze Elettromotrici Indotte
Si consideri un gruppo di N spire affiancate, di forma rettangolare, immerse in un campo statico ed uniforme di induzione B e flusso . Consideriamo il flusso che si concatena con le N spire. Sia Ss la sezione della spira (Ss=ls . bs). Se la bobina è posta perpendicolarmente alle linee di flusso, il flusso concatenato risulta =B.Ss= N. Se la bobina è inclinata di un certo angolo rispetto alla posizione precedente, il flusso concatenato è ()=BN.Sscos()=N cos(). Se la bobina è posta parallelamente alle linee di flusso, ()=NB.Sscos(90°)=0. Si può concludere che: =f() il flusso concatenato dipende dalla posizione della bobina
. Se la bobina è posta perpendicolarmente alle linee di flusso, il flusso concatenato risulta =B.Ss= N. Se la bobina è inclinata di un certo angolo rispetto alla posizione precedente, il flusso concatenato è ()=BN.Sscos()=N cos(). Se la bobina è posta parallelamente alle linee di flusso, ()=NB.Sscos(90°)=0. Si può concludere che: =f() il flusso concatenato dipende dalla posizione della bobina.")
13
Supponiamo che la bobina di N spire sia posta in rotazione con velocità angolare (t) [rad/s] che corrisponde ad n(t) giri al minuto. Il flusso concatenato varia istante per istante. Viene indotta una f.e.m. pari a Conoscendo la dipendenza di da => ((t))= Ncos((t)) Se (t)= costante
![Supponiamo che la bobina di N spire sia posta in rotazione con velocità angolare (t) [rad/s] che corrisponde ad n(t) giri al minuto.](http://slideplayer.it/slide/577357/2/images/13/Supponiamo+che+la+bobina+di+N+spire+sia+posta+in+rotazione+con+velocit%C3%A0+angolare+%EF%81%B7%28t%29+%5Brad%2Fs%5D+che+corrisponde+ad+n%28t%29+giri+al+minuto..jpg "Il flusso concatenato varia istante per istante. Viene indotta una f.e.m. pari a. Conoscendo la dipendenza di da => ((t))= Ncos((t)) Se (t)= costante.")
14
Flusso concatenato e f. e. m
Flusso concatenato e f.e.m. indotta da questo si trovano, in condizioni di stazionarietà, in quadratura tra loro. Consideriamo ora una serie di Nb bobine collegate in serie ed equispaziate sul rotore di un angolo /Nb. Su ogni bobina si induce una f.e.m. che, nella rappresentazione fasoriale, è sfasata dello stesso angolo.

15
Avvolgimento Distribuito per Macchine CC
L’avvolgimento distribuito a collettore è un avvolgimento di indotto posto nelle cave di rotore, in cui i conduttori, uniformemente distribuiti, sono collegati sia tra loro, in modo da formare un avvolgimento chiuso (l’inizio e la fine non sono identificabili), sia con un organo (collettore o commutatore). L’avvolgimento ed il collettore sono necessari per avere grandezze elettriche a valor medio non nullo. La chiusura dell’avvolgimento, Il tipo di avvolgimento più diffuso è quello a tamburo. Definiamo come matassa o bobina l’insieme delle Ns spire comprese tra due lamelle (due lati attivi di matassa). Il numero delle lamelle coincide con il numero di matasse attive dell’avvolgimento.
, sia con un organo (collettore o commutatore). L’avvolgimento ed il collettore sono necessari per avere grandezze elettriche a valor medio non nullo. La chiusura dell’avvolgimento, Il tipo di avvolgimento più diffuso è quello a tamburo. Definiamo come matassa o bobina l’insieme delle Ns spire comprese tra due lamelle (due lati attivi di matassa). Il numero delle lamelle coincide con il numero di matasse attive dell’avvolgimento.")
16
AVVOLGIMENTI: Particolarità Costruttive
Esempio di avvolgimento a filo per macchine di piccola potenza Le testate degli avvolgimenti sono collegate al collettore a) b) Avvolgimento chiuso per (a) un conduttore (b) o più conduttori per fascio indotto
 b) Avvolgimento chiuso per. (a) un conduttore. (b) o più conduttori. per fascio indotto.")
17
Morfologie di una Cava di Macchina CC di Media/Elevata Potenza
fascio indotto costituito da 6 conduttori in serie fascio indotto costituito da un solo conduttore Esempi di Matasse o Bobine

19
Il COLLETTORE Il collegamento elettrico fra un circuito fisso ed uno rotante (o più raramente traslante) è assicurato, per la parte fissa da contatti striscianti morbidi, generalmente a base di carbonio (spazzole), e per la parte mobile da un collettore metallico, per un elemento rotante, ad anelli o, se commutatore, a lamelle.
 è assicurato, per la parte fissa da contatti striscianti morbidi, generalmente a base di carbonio (spazzole), e per la parte mobile da un collettore metallico, per un elemento rotante, ad anelli o, se commutatore, a lamelle.")
20
CARATTERISTICA TENSIONE DI CONTATTO DENSITÀ DI CORRENTE
CARBONE DURO GRAFITE N. ELETTROG. METALG. Vc (VOLT) (A/cm2) 1 2 3
 (A/cm2)")
21
COLLETTORI A CODA DI RONDINE COLLETTORE CON BANDAGGI IN VETRORESINA

22
Tipi di Avvolgimenti Chiusi
Siano p: numero di coppie polari (2p è il numero di poli); 2a: numero di vie interne, numero di vie in parallelo in cui si suddivide la corrente erogata o assorbita dall’avvolgimento. Si possono avere i seguenti tipi di avvolgimenti chiusi: paralleli (embricati) semplici progressivi; paralleli (embricati) semplici regressivi; serie (ondulati) semplici progressivi; serie (ondulati) semplici regressivi; Si possono avere inoltre avvolgimenti derivanti dal parallelo attraverso le spazzole di più avvolgimenti semplici. In particolare è possibile tracciare anche un avvolgimento serie - parallelo che deriva dal parallelo di un avvolgimento ondulato con un avvolgimento embricato.
; 2a: numero di vie interne, numero di vie in parallelo in cui si suddivide la corrente erogata o assorbita dall’avvolgimento. Si possono avere i seguenti tipi di avvolgimenti chiusi: paralleli (embricati) semplici progressivi; paralleli (embricati) semplici regressivi; serie (ondulati) semplici progressivi; serie (ondulati) semplici regressivi; Si possono avere inoltre avvolgimenti derivanti dal parallelo attraverso le spazzole di più avvolgimenti semplici. In particolare è possibile tracciare anche un avvolgimento serie - parallelo che deriva dal parallelo di un avvolgimento ondulato con un avvolgimento embricato.")
23
z: numero delle lamelle del collettore=numero delle matasse attive;
Posto: z: numero delle lamelle del collettore=numero delle matasse attive; M: numero totale dei lati di matassa; Q: numero totale di cave; m: numero di lati di matassa per cava. Allora, M=2z ad ogni lamella convergono due lati attivi; m=M/Q=2z/Q Passi: yc: passo del collettore; numero che, aggiunto al numero d’ordine di una lamella, dà il numero d’ordine della lamella elettricamente consecutiva. ym: passo di cava; numero che aggiunto al numero di ordine di una cava, dà il numero d’ordine della cava elettricamente consecutiva sul lato posteriore.

24
y1: passo posteriore; numero che, aggiunto al numero d’ordine di matassa considerata, dà il numero d’ordine della matassa collegata dal fronte opposto al collettore. y2: passo anteriore; numero che, aggiunto al numero d’ordine di matassa considerata, dà il numero d’ordine della matassa collegata lato collettore. Passo risultante y=y1+y2 Avvolgimento di tipo embricato se il passo posteriore e quello anteriore hanno segni opposti. Avvolgimento di tipo ondulato. I passi posteriore ed anteriore hanno lo stesso segno

25
AVVOLGIMENTO CHIUSO EMBRICATO PROGRESSIVO
y1 y2 yc y1 Passo posteriore y2 Passo anteriore y = y1 + y2 Passo risultante yc Passo al collettore ym Passo alle cave

26
AVVOLGIMENTO CHIUSO EMBRICATO REGRESSIVO
y1 y2 yc y1 Passo posteriore y2 Passo anteriore y = y1 + y2 Passo risultante yc Passo al collettore ym Passo alle cave

27
FORMULE PER L’AVVOLGIMENTO EMBRICATO SEMPLICE
Il segno + si riferisce all’avvolgimento progressivo; Il segno - si riferisce all’avvolgimento regressivo. 2z = fasci indotti; b = numero intero qualsiasi (anche 0); y1 ed y2 numeri dispari; y numero pari. L’avvolgimento parallelo semplice ha tante vie interne quanti sono i poli (2a=2p).
; y1 ed y2 numeri dispari; y numero pari. L’avvolgimento parallelo semplice ha tante vie interne quanti sono i poli (2a=2p).")
28
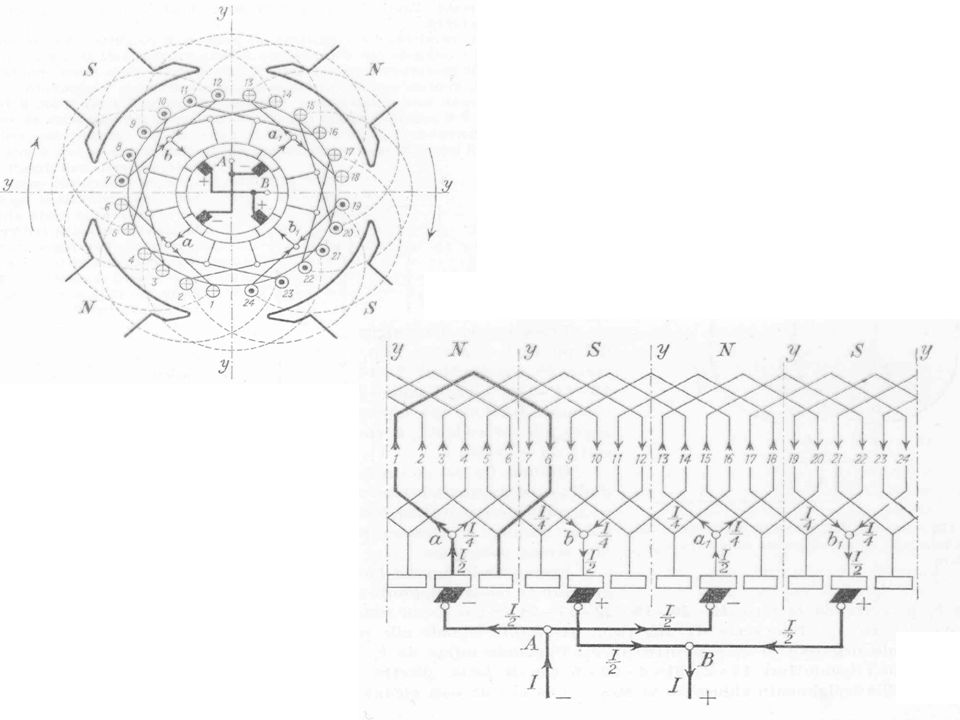
SCHEMA DI AVVOLGIMENTO CHIUSO, A TESTE EMBRICATE, EMBRICATO SEMPLICE, PROGRESSIVO, 2p = 4, z = 24, y1 = 13, y2 = 11, y = 2, yc = 1. N S N S

30
AVVOLGIMENTO CHIUSO SERIE REGRESSIVO
y1 yc y1 Passo posteriore y2 Passo anteriore y = y1 + y2 Passo risultante yc Passo al collettore ym Passo alle cave y y2

31
AVVOLGIMENTO CHIUSO SERIE PROGRESSIVO
y1 yc y2 Passo posteriore y1 Passo anteriore y = y1 + y2 Passo risultante yc Passo al collettore ym Passo alle cave y y2

33
FORMULE PER L’AVVOLGIMENTO SERIE SEMPLICE
; Il segno + si riferisce all’avvolgimento progressivo; Il segno - si riferisce all’avvolgimento regressivo. y1 ed y2 numeri dispari poco diversi fra loro; y numero pari. L’avvolgimento serie semplice ha sempre due vie interne.

34
SCHEMA DI AVVOLGIMENTO CHIUSO, A TESTE EMBRICATE, ONDULATO SEMPLICE, REGRESSIVO, 2p = 4, z = 25, y1 = 13, y2 = 11, y = 24, yc = 6. N S N S

35
Il Circuito Elettrico Visto dai Morsetti di Macchina
La f.e.m. indotta sulle bobine è di tipo alternato. Se colleghiamo in serie le bobine per ottenere un circuito chiuso, ed osserviamo questo circuito dai morsetti esterni collegati all’avvolgimento tramite due spazzole, constatiamo la presenza di due rami in parallelo dove vengono indotte f.e.m. su ogni bobina. I lati atti attivi del lato sinistro sono simmetrici rispetto al lato destro e, a causa del verso contrario di rotazione, le f.e.m. indotte hanno verso opposto. La somma delle f.e.m. indotte sul lato destro è uguale a quella del lato sinistro. Nel circuito chiuso (in corto) non circola corrente. Se considero i fasori, vedo che la risultante di un lato è data dalla somma vettoriale delle f.e.m. delle singole bobine. + - A B EAB EAB
 non circola corrente. Se considero i fasori, vedo che la risultante di un lato è data dalla somma vettoriale delle f.e.m. delle singole bobine. + - A. B. EAB. EAB.")
36
Se ipotizziamo che le lamelle siano molto grandi rispetto alle spazzole, il salto della spazzola tra una lamella e l’altra avviene in tempi trascurabili. La lamella resta in contatto con la spazzola per un arco pari a 360/z, poi salta nella lamella successiva. In questo tempo, l’andamento delle f.e.m. è di tipo sinusoidale (z=6 nell’esempio).
.")
37
Applicazione: Dinamo Tachimetrica
La EAB varia tra un max. ed un min. presentando un valore medio che può essere calcolato: Se n varia e è cost Applicazione: Dinamo Tachimetrica

38
Macchine Multipolari Se la macchina è eccitata e viene mantenuta in rotazione, ai suoi morsetti viene rilevata una f.e.m.indotta Nel caso di strutture multipolari, con p numero di coppie polari, il flusso viene tagliato ogni 1/2p giri e su ogni spira viene indotta una f.e.m.: Se l’indotto è di tipo embricato, il n° di conduttori per via interna è Ns/2p, quindi Se l’indotto è di tipo ondulato, il n° di conduttori per via interna è sempre Ns/2

39
Le Vie Interne Siano a il numero di vie interne di una macchina a 2 poli e due spazzole. Il numero di vie interne è pari al n° di coppie di spazzole ed al numero di poli per gli avvolgimenti embricati La formula più generale delle f.e.m indotte è, per il caso stazionario: per la dinamica:

40
Funzionamento a Carico Coppia di una Macchina CC
Quando la macchina è collegata alla alimentazione, essa assorbe una corrente I nell’indotto che si ripartisce, all’interno della macchina nelle vie interne (Ia=I/2a). Nasce una distribuzione di correnti negli avvolgimenti che ha diverse conseguenze: 1) generazione della coppia motrice; 2) alterazione del campo induttore (reazione di indotto); 3) commutazione; I + - A B I/2 I/2 I Coppia di una Macchina CC Il passaggio di una corrente in un conduttore posto in un campo magnetico di induzione B genera sul conduttore stesso una forza (forza di Lorentz) paria :
. Nasce una distribuzione di correnti negli avvolgimenti che ha diverse conseguenze: 1) generazione della coppia motrice; 2) alterazione del campo induttore (reazione di indotto); 3) commutazione; I. + - A. B. I/2. I/2. I. Coppia di una Macchina CC. Il passaggio di una corrente in un conduttore posto in un campo magnetico di induzione B genera sul conduttore stesso una forza (forza di Lorentz) paria :")
41
Pm(t)=Tm(t).(t)= e(t)i(t)
La forza F ha la direzione tale da contrastare la causa che la genera. F, agendo sui conduttori disposti nelle cave ad una distanza r dal centro di rotazione, genera una coppia motrice Tm(t)= NcF(t)r Sappiamo che la potenza meccanica Pm si esprime come: Pm(t)=Tm(t).(t)= e(t)i(t) In condizioni di stazionarietà Pm=Tm.= E.I Ora, ricordando l’espressione di e(t), possiamo esprimere la coppia in funzione delle grandezze che la generano: In condizioni di stazionarietà: Ricordandoci della relazione tra corrente di eccitazione e flusso:
= NcF(t)r. Sappiamo che la potenza meccanica Pm si esprime come: Pm(t)=Tm(t).(t)= e(t)i(t) In condizioni di stazionarietà Pm=Tm.= E.I. Ora, ricordando l’espressione di e(t), possiamo esprimere la coppia in funzione delle grandezze che la generano: In condizioni di stazionarietà: Ricordandoci della relazione tra corrente di eccitazione e flusso:")
42
Reazione di Indotto Gli avvolgimenti vengono attraversati da una corrente che, a sua volta, genera un campo magnetico (indotto) che, combinandosi con il campo induttore, genera un campo risultante diverso da quello a vuoto. Questa distorsione è nota come Reazione di Indotto. Il campo indotto dipende dalla disposizione dei lati attivi sul rotore. Con rif. alla figura, i conduttori sotto il polo nord sono percorsi da una corrente entrante (uscente sotto il polo sud). La regola del “cavatappi” determina il verso delle linee di flusso. I versi di percorrenza dei flussi suggeriscono una loro simulazione mediante coppia di poli che hanno una direzione perpendicolare all’asse interpolare (Campo Trasverso). Qualsiasi sia il n°di poli induttori, i campi trasversi si collocano sempre negli assi interpolari.
 che, combinandosi con il campo induttore, genera un campo risultante diverso da quello a vuoto. Questa distorsione è nota come Reazione di Indotto. Il campo indotto dipende dalla disposizione dei lati attivi sul rotore. Con rif. alla figura, i conduttori sotto il polo nord sono percorsi da una corrente entrante (uscente sotto il polo sud). La regola del cavatappi determina il verso delle linee di flusso. I versi di percorrenza dei flussi suggeriscono una loro simulazione mediante coppia di poli che hanno una direzione perpendicolare all’asse interpolare (Campo Trasverso). Qualsiasi sia il n°di poli induttori, i campi trasversi si collocano sempre negli assi interpolari.")
43
Se consideriamo l’andamento del campo induttore e lo componiamo con il campo indotto, otteniamo il campo risultante che risulta deformato. Nell’esempio, si nota un addensamento del campo nei corni polari di uscita, rispetto al verso di rotazione) dai due poli ed una rarefazione nei corni di ingresso (Corni polari: estremi polari dai quali i conduttori entrano ed escono dai poli). Il contrario avviene nei motori. L’andamento del campo magnetico viene messo in evidenza in una struttura planare
 dai due poli ed una rarefazione nei corni di ingresso (Corni polari: estremi polari dai quali i conduttori entrano ed escono dai poli). Il contrario avviene nei motori. L’andamento del campo magnetico viene messo in evidenza in una struttura planare.")
44
L’andamento della f.m.m. di induzione è rettangolare.
La f.m.m di indotto è composta dalla somme delle f.m.m. generate in ogni singola cava, le quali risultano sfasate tra loro di un passo di cava. Il campo risultante è a gradini. Se ni e qi sono i conduttori per cava ed il numero di cave sotto un polo, allora il valore max di A/sp vale: Ip: per semplicità si approssimano i gradini con una retta. L’induzione B varia con la riluttanza del circuito. Il profilo della induzione risultante è fortemente variato.

45
La reazione di indotto provoca:
una distorsione della distribuzione della induzione; una diminuzione del flusso totale perché, alla diminuzione del flusso sotto un corno polare, non corrisponde un identico aumento nell’altro corno perché l’induzione è finita in saturazione. Ne segue che diminuisce la f.e.m indotta (caduta di tensione per reazione di indotto); lo spostamento del piano di inversione della induzione. (ASSE NEUTRO). Tale piano, nel funzionamento a vuoto, coincide con l’asse interpolare. La inversione delle correnti nelle spire avviene in presenza di un campo residuo.
; lo spostamento del piano di inversione della induzione. (ASSE NEUTRO). Tale piano, nel funzionamento a vuoto, coincide con l’asse interpolare. La inversione delle correnti nelle spire avviene in presenza di un campo residuo.")
46
Posizionamento delle Spazzole
Il posizionamento delle spazzole sul collettore deve essere tale da non creare problemi. Per la f.e.m., dovunque si colleghino le spazzole, la loro somma nell’avvolgimento chiuso è sempre =0. In ogni caso, il collegamento avviene tra lamella e testa della bobina che si trova sull’asse neutro (max.flusso concatenato). Durante la commutazione delle correnti, alcune spire vengono messe in corto dalle spazzole in presa su più lamelle. In presenza di un campo magnetico, nelle spire in corto vengono indotte delle correnti. La collocazione delle spazzole sull’asse neutro fa si che la commutazione avvenga in presenza dell’annullamento del campo induttore ma non del campo totale. Asse interpolare Asse interpolare
. Durante la commutazione delle correnti, alcune spire vengono messe in corto dalle spazzole in presa su più lamelle. In presenza di un campo magnetico, nelle spire in corto vengono indotte delle correnti. La collocazione delle spazzole sull’asse neutro fa si che la commutazione avvenga in presenza dell’annullamento del campo induttore ma non del campo totale. Asse interpolare. Asse interpolare.")
47
Commutazione delle Correnti
Insieme di fenomeni che si generano sotto carico per la inversione delle correnti in spire corto-circuitate dalle spazzole. Durante la commutazione, la lamelle 1 e 2 vengono in contatto con la spazzola. Le spire collegate vengono cortocircuitate in presenza di un campo variabile non nullo (Bc) che genera f.e.m. indotte ed un conseguente aumento di corrente che si oppone al cambiamento. Quando la spazzola lascia la L.1, l’energia immagazzinata nella spira si scarica con uno scintillio nello strato di aria interposto, deteriorando la spazzola (riscaldamento).
 che genera f.e.m. indotte ed un conseguente aumento di corrente che si oppone al cambiamento. Quando la spazzola lascia la L.1, l’energia immagazzinata nella spira si scarica con uno scintillio nello strato di aria interposto, deteriorando la spazzola (riscaldamento).")
48
x: prop. alla superficie di contatto; possiamo scrivere:
Rs Ls Ia I Ia-i(t) Ia+i(t) R2=r/x R1=r/(1-x) i(t) Se consideriamo la spira in corto, la lamella e la spazzola che è in presa, possiamo simularla con lo schema accanto. Se v=cost, r: resistenza della lamella + resistenza di contatto tra spazzola e lamella ; x: prop. alla superficie di contatto; possiamo scrivere: Che risolta, fornisce un profilo di un transitorio del primo ordine.
 Ia+i(t) R2=r/x. R1=r/(1-x) i(t) Se consideriamo la spira in corto, la lamella e la spazzola che è in presa, possiamo simularla con lo schema accanto. Se v=cost, r: resistenza della lamella + resistenza di contatto tra spazzola e lamella ; x: prop. alla superficie di contatto; possiamo scrivere: Che risolta, fornisce un profilo di un transitorio del primo ordine.")
49
Provvedimenti per migliorare la Commutazione
A) aumento della resistenza delle spazzole utilizzando carbonio duro (abrasione del rame) o metal grafite sinterizzata; B) presa di più lamelle (fino a 4/5 nelle grosse macchine), più spire si trovano in corto. Ogni una di queste è sede di diverse correnti di commutazione perché diversamente localizzate. L’energia magnetica viene trasferita da una spira all’altra dalle induttanze mutue. L’energia in eccesso viene immagazzinata tra le spire e solo una piccola parte si scarica sulle lamelle. C) apertura dei canali di cava. Dato che la causa è una f.e.m. di auto induzione, si cerca di limitare L limitando il numero di spire in cava ed aprendo quest’ultima così che il flusso si chiuda sulla scarpa polare e non sul ponticello. Osservazione: Tutti questi accorgimenti hanno una efficacia limitata e vengono adottati in macchine di piccola taglia. Le macchine di grossa taglia richiedono soluzioni costruttive diverse.
 aumento della resistenza delle spazzole utilizzando carbonio duro (abrasione del rame) o metal grafite sinterizzata; B) presa di più lamelle (fino a 4/5 nelle grosse macchine), più spire si trovano in corto. Ogni una di queste è sede di diverse correnti di commutazione perché diversamente localizzate. L’energia magnetica viene trasferita da una spira all’altra dalle induttanze mutue. L’energia in eccesso viene immagazzinata tra le spire e solo una piccola parte si scarica sulle lamelle. C) apertura dei canali di cava. Dato che la causa è una f.e.m. di auto induzione, si cerca di limitare L limitando il numero di spire in cava ed aprendo quest’ultima così che il flusso si chiuda sulla scarpa polare e non sul ponticello. Osservazione: Tutti questi accorgimenti hanno una efficacia limitata e vengono adottati in macchine di piccola taglia. Le macchine di grossa taglia richiedono soluzioni costruttive diverse.")
50
I Poli Ausiliari Si cerca di neutralizzare la Bc di commutazione con la generazione di un campo concentrato delle medesima intensità e di verso contrario. Ciò si ottiene inserendo nel vano interpolare un polo ausiliario in corrispondenza dell’asse neutro. Ciascun polo aus. deve avere la stessa polarità del polo principale verso cui i conduttori si inoltrano. Dato che lo spostamento dell’asse neutro è legato alla corrente di carico,

51
I Circuiti Compensatori
I poli ausiliari devono essere alimentati dalla corrente di carico stessa (collegamento in serie con il circuito principale). Il n. dei poli aus. è pari a quello dei poli principali I Circuiti Compensatori Nelle grosse macchine si cerca di sopprimere totalmente la distorsione del campo magnetico induttore mediante avvolgimenti compensatori. Si collocano sulle scarpe polari, vicino al traferro e sono percorsi dalla corrente di carico in verso opposto rispetto ai conduttori sottostanti.
. Il n. dei poli aus. è pari a quello dei poli principali. I Circuiti Compensatori. Nelle grosse macchine si cerca di sopprimere totalmente la distorsione del campo magnetico induttore mediante avvolgimenti compensatori. Si collocano sulle scarpe polari, vicino al traferro e sono percorsi dalla corrente di carico in verso opposto rispetto ai conduttori sottostanti.")
52
Gli avvolgimenti sono di tipo concentrico.
È difficile ottenere la compensazione totale.

53
Equazioni Interne: Motore ad Eccitazione Separata
1) legge di Kirchoff per il circuito di eccitazione che genera il flusso. (si trascura la variazione del flusso sulle scarpe polari dovute alla influenza delle cave e dalla reazione di indotto). 2) la ie(t) genera il flusso principale: Rp 3) se il rotore è in rotazione, sui conduttori di rotore si induce una f.e.m. pari a: 4) legge di Kirchoff per il circuito di armatura:
 legge di Kirchoff per il circuito di eccitazione che genera il flusso. (si trascura la variazione del flusso sulle scarpe polari dovute alla influenza delle cave e dalla reazione di indotto). 2) la ie(t) genera il flusso principale: Rp. 3) se il rotore è in rotazione, sui conduttori di rotore si induce una f.e.m. pari a: 4) legge di Kirchoff per il circuito di armatura:")
54
Tm(t)=Tr(t)+F(t)+Jd(t)/dt
5) legge di generazione della coppia motrice: Equazioni Esterne La macchina è collegata ad una rete di alimentazione che può essere regolata o fissa. Il vincolo esterno di può essere una legge di variazione della tensione di alimentazione (va=va(t)) o un valore fisso della stessa (Va). Al rotore è collegato un carico meccanico le cui grandezze di interesse possono essere la coppia resistente (Tr(t)), la velocità angolare ((t)) o la posizione angolare ((t)). Per il transitorio, alla coppia resistente si aggiunge una coppia resistente dissipativa (attriti) ed una coppia di inerzia. Tm(t)=Tr(t)+F(t)+Jd(t)/dt
 legge di generazione della coppia motrice: Equazioni Esterne. La macchina è collegata ad una rete di alimentazione che può essere regolata o fissa. Il vincolo esterno di può essere una legge di variazione della tensione di alimentazione (va=va(t)) o un valore fisso della stessa (Va). Al rotore è collegato un carico meccanico le cui grandezze di interesse possono essere la coppia resistente (Tr(t)), la velocità angolare ((t)) o la posizione angolare ((t)). Per il transitorio, alla coppia resistente si aggiunge una coppia resistente dissipativa (attriti) ed una coppia di inerzia. Tm(t)=Tr(t)+F(t)+Jd(t)/dt.")
55
Equazioni Interne: Condizioni di Regime
A regime, le grandezze elettriche e meccaniche sono costanti nel tempo Da queste relazioni è possibile ricavare le caratteristiche statiche che permettono di descrivere anche graficamente le modalità di funzionamento della macchina nonché del passaggio da uno stato di regime ad un altro, trascurando il transitorio.

56
Bilancio delle Potenze: in dinamica
1) circuito di eccitazione: 2) circuito di armatura: 3) potenza meccanica generata 4) potenza meccanica
 circuito di eccitazione: 2) circuito di armatura: 3) potenza meccanica generata. 4) potenza meccanica.")
57
Ed in Regime Stazionario
A regime, le grandezze elettriche e meccaniche sono costanti nel tempo Con le equazioni sopra riassunte è possibile descrivere il comportamento della macchina sia in transitorio che a regime, all’avviamento, a vuoto e sotto carico a regime. Avviamento allo spunto: per t=0 => (t)=0 => e(t)=0 Essendo la Ra molto piccola, si inserisce un sistema di avviamento per limitare la corrente di spunto.
=0 => e(t)=0. Essendo la Ra molto piccola, si inserisce un sistema di avviamento per limitare la corrente di spunto.")
58
ias(0) determina la coppia di spunto per l’avviamento della macchina
A Vuoto: Tr=0 la macchina assorbe potenza per compensare le perdite interne A Carico: la macchina si pone in equilibrio dinamico quando la coppia motrice eguaglia la coppia resistente ad un numero di giri : Se consideriamo la caratteristica meccanica (T=f(n)), i punti di equilibrio dinamico si trovano nelle intersezioni tra le caratteristiche meccaniche del carico e della macchina (a meno degli attriti). L’equilibrio può essere stabile o instabile.
), i punti di equilibrio dinamico si trovano nelle intersezioni tra le caratteristiche meccaniche del carico e della macchina (a meno degli attriti). L’equilibrio può essere stabile o instabile.")
59
Analisi Qualitativa dell’Equilibrio
Eq. Stabile Eq. Instabile n n-n T n+n Tr=f(n) Tm=f(n) n n-n T n+n Tm=f(n) Tr=f(n) P P Se una perturbazione decelera la macchina: n => n-n ma Tm>Tr, la macchina accelera e torna a P. Se una perturbazione accelera la macchina: n => n+n ma Tm<Tr, la macchina decelera e torna a P. Se una perturbazione decelera la macchina: n => n-n ma Tm<Tr, la macchina si arresta. Se una perturbazione accelera la macchina: n => n+n ma Tm>Tr, la macchina accelera e va in fuga.
 Tm=f(n) n. n-n. T. n+n. Tm=f(n) Tr=f(n) P. P. Se una perturbazione decelera la macchina: n => n-n ma Tm>Tr, la macchina accelera e torna a P. Se una perturbazione accelera la macchina: n => n+n ma Tm<Tr, la macchina decelera e torna a P. Se una perturbazione decelera la macchina: n => n-n ma Tm<Tr, la macchina si arresta. Se una perturbazione accelera la macchina: n => n+n ma Tm>Tr, la macchina accelera e va in fuga.")
60
Motore ad Eccitazione in Derivazione
La alimentazione della eccitazione è collegata alla alimentazione del motore. ve(t)=va(t) ed anche Ve=Va Va Rp
=va(t) ed anche Ve=Va. Va. Rp.")
61
Equazioni Interne: Condizioni di Regime
Vantaggi: la struttura della eccitazione viene semplificata (riduzione di costo). Svantaggi: se la macchina viene regolata variando la tensione di armatura, varia anche la eccitazione (sistema non lineare). Se la macchina non è satura, ad un aumento di Va corrisponde un proporzionale aumento di flusso e, quindi, la velocità non varia. Se la macchina è satura, il flusso non cresce in proporzione e si ha un certo aumento di velocità. Per il resto, la macchina con eccitazione in derivazione si comporta come una macchina con eccitazione separata.
. Svantaggi: se la macchina viene regolata variando la tensione di armatura, varia anche la eccitazione (sistema non lineare). Se la macchina non è satura, ad un aumento di Va corrisponde un proporzionale aumento di flusso e, quindi, la velocità non varia. Se la macchina è satura, il flusso non cresce in proporzione e si ha un certo aumento di velocità. Per il resto, la macchina con eccitazione in derivazione si comporta come una macchina con eccitazione separata.")
62
Motore con Eccitazione Serie
La corrente di armatura è anche la corrente di eccitazione (ia(t)=ie(t) ed anche (Ia=Ie)) Va
=ie(t) ed anche (Ia=Ie)) Va.")
63
Equazioni Interne: Condizioni di Regime
Vantaggi: la struttura della eccitazione viene semplificata. Il flusso segue la corrente di carico. Svantaggi: se la macchina viene regolata, varia anche la eccitazione (sistema non lineare). Macchina particolarmente adatta alle continue variazioni di velocità. Al variare della corrente di carico, il flusso segue la caratteristica di magnetizzazione, finendo facilmente in saturazione
. Macchina particolarmente adatta alle continue variazioni di velocità. Al variare della corrente di carico, il flusso segue la caratteristica di magnetizzazione, finendo facilmente in saturazione.")
64
Perdite e Rendimenti Si distinguono le perdite rilevabili a vuoto da quelle a carico. Perdite a Vuoto Correnti parassite: durante la rotazione, il rotore è sottoposto a variazioni di flusso che determina l’insorgere di correnti parassite Kf=1420; : spessore del traferro; f=pn/60; Isteresi Magnetica: dovute ai cicli magnetizzazione e smagnetizzazione cui è sottoposto il rotore. Perdite Addizionali: vengono stimate nell’ordine del 15%20% per tener conto dei difetti di fabbricazione e delle perdite addizionali nelle placche, nei bulloni di serraggio ed altro.

65
In totale, le perdite nel ferro variano dal 4% all’ 1
In totale, le perdite nel ferro variano dal 4% all’ 1.5% per piccole e grandi macchine, rispettivamente. Perdite nella eccitazione: solo effetto Joule Pe=Reie2(t) Perdite Meccaniche: dovute agli attriti nei supporti, usura dei cuscinetti (proporzionale alla velocità). Pm=1.5%0.25% dai piccoli ai grandi motori, rispettivamente. L’attrito collettore-spazzole dipende dalla pressione con cui le spazzole si appoggiano sul collettore dalla natura delle superfici di contatto. Le perdite per ventilazione dipendono dalla forma dell’indotto e dalla presenza o meno di un ventilatore calettato sull’albero. Si possono ritenere legate al cubo del numero di giri,n. Le perdite meccaniche sono costanti se la velocità angolare resta costante. Tutte queste perdite possono essere misurate con una “prova a vuoto”, cioè senza carico sul rotore. Si misurano i giri del motore, la potenza assorbita dalle rete e dalla eccitazione.
 Perdite Meccaniche: dovute agli attriti nei supporti, usura dei cuscinetti (proporzionale alla velocità). Pm=1.5%0.25% dai piccoli ai grandi motori, rispettivamente. L’attrito collettore-spazzole dipende dalla pressione con cui le spazzole si appoggiano sul collettore dalla natura delle superfici di contatto. Le perdite per ventilazione dipendono dalla forma dell’indotto e dalla presenza o meno di un ventilatore calettato sull’albero. Si possono ritenere legate al cubo del numero di giri,n. Le perdite meccaniche sono costanti se la velocità angolare resta costante. Tutte queste perdite possono essere misurate con una prova a vuoto , cioè senza carico sul rotore. Si misurano i giri del motore, la potenza assorbita dalle rete e dalla eccitazione.")
66
Perdite a Carico Perdite nel rame per effetto Joule: perdite dovute alla resistenza degli avvolgimenti indotti ed induttori ed alle resistenze delle spazzole (proprie e di contatto). Pcu= 10% piccoli 4% grandi Perdite Totali: Pp= 16% piccoli 6% grandi, rispetto alla potenza nominale di targa. Rendimento varia tra 0.840.94 per piccoli e grandi motori, rispettivamente. =0.5 per P/Pu=1/4; max per Pcu=P0; La prova a carico si effettua con un carico noto (dinamo freno). Si misura la potenza assorbita in condizioni nominali e si sottrae la potenza a vuoto. Le perdite nel rame si determinano per via indiretta.
. Pcu= 10% piccoli 4% grandi. Perdite Totali: Pp= 16% piccoli 6% grandi, rispetto alla potenza nominale di targa. Rendimento varia tra 0.840.94 per piccoli e grandi motori, rispettivamente. =0.5 per P/Pu=1/4; max per Pcu=P0; La prova a carico si effettua con un carico noto (dinamo freno). Si misura la potenza assorbita in condizioni nominali e si sottrae la potenza a vuoto. Le perdite nel rame si determinano per via indiretta.")
67
Le Caratteristiche Statiche
Con le equazioni della dinamica è possibile descrivere: a) i transitori di accensione e spegnimento della macchina; b) spostamento da un punto di equilibrio ad un altro; c) dinamica delle variazioni rispetto al punto di lavoro causata da perturbazioni. In una data condizione di regime permanente, le grandezze elettriche e meccaniche sono legate tra loro da grandezze indipendenti dal tempo. Al variare delle condizioni di regime permanente, corrente e velocità cambiano, f.e.m. e coppia si modificano di conseguenza. Tali variazioni trovano rappresentazione in curve caratteristiche che consentono di analizzare le prestazioni elettriche o meccaniche di una macchina in regime di stazionarietà. Vengono classificate in caratteristiche elettriche, meccaniche, elettromeccaniche.
 i transitori di accensione e spegnimento della macchina; b) spostamento da un punto di equilibrio ad un altro; c) dinamica delle variazioni rispetto al punto di lavoro causata da perturbazioni. In una data condizione di regime permanente, le grandezze elettriche e meccaniche sono legate tra loro da grandezze indipendenti dal tempo. Al variare delle condizioni di regime permanente, corrente e velocità cambiano, f.e.m. e coppia si modificano di conseguenza. Tali variazioni trovano rappresentazione in curve caratteristiche che consentono di analizzare le prestazioni elettriche o meccaniche di una macchina in regime di stazionarietà. Vengono classificate in caratteristiche elettriche, meccaniche, elettromeccaniche.")
68
Le Caratteristiche dei Motori ad Ecc. Indipendente
Per i motori, si fa riferimento alle caratteristiche: caratteristica elettromeccanica della velocità (velocità in funzione della corrente assorbita); caratteristica elettromeccanica di coppia (coppia elettromagnetica in funzione della corrente assorbita); caratteristica meccanica (coppia in funzione della velocità). Le caratteristiche vengono rappresentate in famiglie di curve in funzione del parametro di regolazione (tensione di alimentazione o eccitazione). Si fa riferimento alle equazioni della statica:
; caratteristica elettromeccanica di coppia (coppia elettromagnetica in funzione della corrente assorbita); caratteristica meccanica (coppia in funzione della velocità). Le caratteristiche vengono rappresentate in famiglie di curve in funzione del parametro di regolazione (tensione di alimentazione o eccitazione). Si fa riferimento alle equazioni della statica:")
69
La Caratteristica Elettromeccanica di Velocità (, n=f(Ia))
Dalla relazione Possiamo ricavare la dipendenza di n o di da Ia La caratteristica è lineare in Ia. Per Va=cost, la velocità del motore diminuisce al crescere della caduta RaIa, quindi al crescere di Ia, a partire da una velocità di condizioni di vuoto (Ia=0); Il limite di funzionamento è legato al valore ammissibile di Ia.
; Il limite di funzionamento è legato al valore ammissibile di Ia.")
70
Le caratteristiche hanno una dipendenza inversa dal flusso per polo.
Le condizioni sono diverse a seconda del grado di saturazione o della presenza di poli ausiliari o circuiti compensatori. Cond. di non saturazione: Ke’’ varia per effetto della reazione di indotto. La caratteristica è una retta (curva a) che forma un angolo (tg=Ra/ Ke’’). Ra è piccola => piccolo => variazioni modeste di n al variare di Ia. Cond. di leggera saturazione (assenza di circuiti compensatori): la reazione di indotto fa diminuire il flusso. Si ha una quasi compensazione della caduta RaIa. Si realizza un funzionamento a velocità praticamente costante (curva b). Cond. di forte saturazione (assenza di circuiti compensatori): la forte reazione di indotto fa diminuire di molto rispetto alla caduta RaIa. Si ha un aumento della velocità al crescere della corrente Ia (curva c). In presenza dei circuiti compensatori, il termine Ke’’ non varia per effetto della reazione di indotto. La caratteristica è una retta (curva a).
 che forma un angolo (tg=Ra/ Ke’’). Ra è piccola => piccolo => variazioni modeste di n al variare di Ia. Cond. di leggera saturazione (assenza di circuiti compensatori): la reazione di indotto fa diminuire il flusso. Si ha una quasi compensazione della caduta RaIa. Si realizza un funzionamento a velocità praticamente costante (curva b). Cond. di forte saturazione (assenza di circuiti compensatori): la forte reazione di indotto fa diminuire di molto rispetto alla caduta RaIa. Si ha un aumento della velocità al crescere della corrente Ia (curva c). In presenza dei circuiti compensatori, il termine Ke’’ non varia per effetto della reazione di indotto. La caratteristica è una retta (curva a).")
71
La Caratteristica Elettromeccanica di Coppia (Tm=f(Ia))
Oss.: n rimane positivo anche nel funzionamento come generatore (E>Va, Ia<0), per cui in una macchina con eccitazione indipendente, il passaggio da motore a generatore avviene senza che il verso di rotazione cambi. Cambia solo il verso della corrente e con esso il segno della potenza. La Caratteristica Elettromeccanica di Coppia (Tm=f(Ia)) T La caratteristica è lineare in Ia. Varia con a seconda del grado di saturazione o se ci sono circuiti compensatori. No sat.: Tm Ia (retta a); Poco sat.: Tm Ia (curva b); Molto sat.: Tm Ia (curva c); Comp.: Tm Ia (retta a);
, per cui in una macchina con eccitazione indipendente, il passaggio da motore a generatore avviene senza che il verso di rotazione cambi. Cambia solo il verso della corrente e con esso il segno della potenza. La Caratteristica Elettromeccanica di Coppia (Tm=f(Ia)) T. La caratteristica è lineare in Ia. Varia con a seconda del grado di saturazione o se ci sono circuiti compensatori. No sat.: Tm Ia (retta a); Poco sat.: Tm Ia (curva b); Molto sat.: Tm Ia (curva c); Comp.: Tm Ia (retta a);")
72
La Caratteristica Meccanica (Tm=f(n))
Dalle relazioni Possiamo ricavare la dipendenza di Tm da n o da , esprimendo la prima eq. in funzione di Ia: La caratteristica è lineare con pendenza negativa. Per un aumento di Ie il flusso cresce ed n0 cala. La caratteristica meccanica trasla verso i valori più bassi di n. A vuoto (Ia=0 => Tm=0) Allo spunto (n=0 => Tm=0) Ra è bassa => Tms ed Ia sono elevate
 Allo spunto (n=0 => Tm=0) Ra è bassa => Tms ed Ia sono elevate.")
73
Data la diretta proporzionalità tra Tm ed Ia, valgono le stesse considerazioni svolte per la curva n=f(Ia). Per Va=cost, la velocità del motore diminuisce al crescere della caduta RaIa, quindi al crescere di Ia, a partire da una velocità di condizioni di vuoto, n0; Tr T Tr1 In assenza dei circuiti compensatori, la caratteristica varia al variare del grado di saturazione (No sat.=>curva a; lieve sat.=>curva b; forte sat.=>curva c). In presenza dei circuiti compensatori => curva a. La macchina è intrinsecamente stabile solo per non o lieve saturazione (analisi di stabilità). Fissati Va e , la variazione di velocità è limitata. Se si vuole ampliare l’intervallo variazione di velocità devo agire su questi due parametri.
. In presenza dei circuiti compensatori => curva a. La macchina è intrinsecamente stabile solo per non o lieve saturazione (analisi di stabilità). Fissati Va e , la variazione di velocità è limitata. Se si vuole ampliare l’intervallo variazione di velocità devo agire su questi due parametri.")
74
Le Caratteristiche dei Motori ad Ecc. Derivata
Per i motori ad eccitazione in derivazione valgono le: Dalla prima si vede che se si mantiene costante la Va rimane costante anche la Ie. In queste condizione, caratteristiche statiche sono uguali a quelle della eccitazione indipendente. Sia =>

75
È l’equazione di una retta con pendenza negativa
A vuoto (Tr=0 => Tm0) Allo spunto (n=0) La coppia e la corrente di spunto sono elevati. Bisogna limitare la corrente di spunto (Ias=Va/Ra). In corrispondenza a variazioni della Va, la Ie varia proporzionalmente. Se la macchina non è satura, ad un aumento di Va corrisponde un proporzionale aumento di e la velocità non varia. Se la macchina è satura, non cresce proporzionalmente e si ha un aumento della velocità. Anche per questo tipo di macchine, il passaggio da motore a generatore avviene con la variazione di velocità, senza che vari il verso di rotazione.
 Allo spunto (n=0) La coppia e la corrente di spunto sono elevati. Bisogna limitare la corrente di spunto (Ias=Va/Ra). In corrispondenza a variazioni della Va, la Ie varia proporzionalmente. Se la macchina non è satura, ad un aumento di Va corrisponde un proporzionale aumento di e la velocità non varia. Se la macchina è satura, non cresce proporzionalmente e si ha un aumento della velocità. Anche per questo tipo di macchine, il passaggio da motore a generatore avviene con la variazione di velocità, senza che vari il verso di rotazione.")
76
Le Caratteristiche dei Motori ad Ecc. Serie
In assenza di avvolgimenti compensatori, l’andamento del flusso in funzione della sua corrente di magnetizzazione, Ia, è dato dalla curva a che differisce dalla caratteristica di una ecc. indipendente per l’effetto della reazione di indotto (curva b). Nella curva distinguiamo tre tratti: 1-2: Tratto lineare; 2-3: Ginocchio; 3-4: Tratto lineare di saturazione. Questa distinzione torna utile per semplificare lo studio delle caratteristiche statiche
. Nella curva distinguiamo tre tratti: 1-2: Tratto lineare; 2-3: Ginocchio; 3-4: Tratto lineare di saturazione. Questa distinzione torna utile per. semplificare lo studio delle. caratteristiche statiche.")
77
La Caratteristica Elettromeccanica di Velocità (, n=f(Ia))
Dalla relazione che lega il numero di giri alla corrente di armatura: Nell’ipotesi di motore non saturo (tratto 1-2) Se nella prima eq. trascuro la caduta rispetto alla tensione di armatura e inserisco la II°eq.: Equazione di una iperbole. Se Ia=>0, n diventa elevato. La macchina non funziona bene a basso carico. Se n=>0 Ia diventa elevata
 Se nella prima eq. trascuro la caduta rispetto alla tensione di armatura e inserisco la II°eq.: Equazione di una iperbole. Se Ia=>0, n diventa elevato. La macchina non funziona bene a basso carico. Se n=>0 Ia diventa elevata.")
78
La Caratteristica Elettromeccanica di Coppia (Tm=f(Ia))
Se siamo in saturazione (tratto 2-3), il flusso non varia proporzionalmente alla corrente: n cresce rispetto al caso non saturo. Se siamo in forte saturazione (tratto 3-4), il flusso resta praticamente costante. La caratteristica è quasi lineare. La Caratteristica Elettromeccanica di Coppia (Tm=f(Ia)) Per il tratto (1-2) e la caratteristica assume la forma parabolica Per il tratto (3-4) il flusso è costante La caratteristica è rappresentata da una retta passante per l’origine
, il flusso non varia proporzionalmente alla corrente: n cresce rispetto al caso non saturo. Se siamo in forte saturazione (tratto 3-4), il flusso resta praticamente costante. La caratteristica è quasi lineare. La Caratteristica Elettromeccanica di Coppia (Tm=f(Ia)) Per il tratto (1-2) e la caratteristica assume la forma parabolica. Per il tratto (3-4) il flusso è costante. La caratteristica è rappresentata da una retta passante per l’origine.")
79
La Caratteristica Meccanica (Tm=f(n))
Per il tratto (2-3) ha un andamento che raccorda la parabola e la retta. e la caratteristica assume la forma parabolica La Caratteristica Meccanica (Tm=f(n)) Per il tratto (1-2) il flusso è prop. alla corrente
 ha un andamento che raccorda la parabola e la retta. e la caratteristica assume la forma parabolica. La Caratteristica Meccanica (Tm=f(n)) Per il tratto (1-2) il flusso è prop. alla corrente.")
80
Trascurando il contributo della resistenza si ha:
Tn2 Per il tratto (3-4) il flusso è costante Che è una retta decrescente. Allo spunto: (n=0)
 il flusso è costante. Che è una retta decrescente. Allo spunto: (n=0)")
81
Per il tratto 2-3, le leggi di variazione della velocità e della coppia sono tali da dare luogo ad una curva assimilabile, in prima approssimazione, alla: con 1<<2 In presenza di circuiti compensatori, la procedura di studio è la stessa (caratteristica magnetica divisa in tre parti). La caratteristica meccanica di un motore ad eccitazione serie mette in evidenza le seguenti proprietà: funzionamento stabile; elevata coppia di spunto; coppia decrescente all’aumentare della velocità con limitate variazioni della potenza sviluppata. Limitazione: la velocità cresce rapidamente al diminuire della coppia resistente. Il motore con eccitazione serie non può funzionare con una coppia resistente al di sotto di un certo limite.
. La caratteristica meccanica di un motore ad eccitazione serie mette in evidenza le seguenti proprietà: funzionamento stabile; elevata coppia di spunto; coppia decrescente all’aumentare della velocità con limitate variazioni della potenza sviluppata. Limitazione: la velocità cresce rapidamente al diminuire della coppia resistente. Il motore con eccitazione serie non può funzionare con una coppia resistente al di sotto di un certo limite.")
82
La Regolazione della Velocità nei Motori CC
Dalla analisi della espressione del n° di giri, si osserva che è possibile regolare la velocità agendo su: resistenza del circuito di armatura (inserzione di resistenze addizionali reali o fittizie); tensione di armatura; flusso attraverso la corrente di eccitazione Al fine di ottenere una buona regolazione garantendo un buon funzionamento del motore, è opportuno realizzare le seguenti condizioni: 1) la corrente di eccitazione e quindi il flusso, non deve superare il valore nominale per evitare la saturazione del circuito magnetico; 2) la corrente di indotto non deve superare il valore nominale per evitare riscaldamenti anomali del motore; 3) la tensione di alimentazione non deve superare quella nominale.
; tensione di armatura; flusso attraverso la corrente di eccitazione. Al fine di ottenere una buona regolazione garantendo un buon funzionamento del motore, è opportuno realizzare le seguenti condizioni: 1) la corrente di eccitazione e quindi il flusso, non deve superare il valore nominale per evitare la saturazione del circuito magnetico; 2) la corrente di indotto non deve superare il valore nominale per evitare riscaldamenti anomali del motore; 3) la tensione di alimentazione non deve superare quella nominale.")
83
Regolazione della Tensione di Armatura
Diminuendo la tensione di armatura e mantenendo il flusso costante al valore nominale, si ottiene una diminuzione della velocità n. A vuoto (Ia=0 => Tm=0) T Tn Tr Se Va cala, cala n e cala anche la coppia di spunto. La caratteristica meccanica trasla verso sinistra parallelamente a se stessa. Tms Vas Il punto di lavoro si muove in funzione della forma della caratteristica di carico fino a determinare le condizioni di spunto.
 T. Tn. Tr. Se Va cala, cala n e cala anche la coppia di spunto. La caratteristica meccanica trasla verso sinistra parallelamente a se stessa. Tms. Vas. Il punto di lavoro si muove in funzione della forma della caratteristica di carico fino a determinare le condizioni di spunto.")
84
Il confronto tra i limiti di prestazione del motore per diversi valori della tensione di armatura viene fatto a parità di corrente di indotto, Ia=In, pari a quella nominale, qualunque sia la velocità. Essendo il flusso costante, al diminuire di Va, il motore sviluppa in ogni caso la coppia nominale (funzionamento a coppia costante), mentre la potenza elettrica convertita in meccanica cala linearmente perchè la f.e.m. indotta diminuisce con la velocità. T Tn Tr Le caratteristiche statiche e della curva di carico mostrano come avviene il passaggio da una condizione di funzionamento ad un’altra, a meno del transitorio.
, mentre la potenza elettrica convertita in meccanica cala linearmente perchè la f.e.m. indotta diminuisce con la velocità. T. Tn. Tr. Le caratteristiche statiche e della curva di carico mostrano come avviene il passaggio da una condizione di funzionamento ad un’altra, a meno del transitorio.")
85
Regolazione della Corrente di Eccitazione
Se facciamo variare il reostato di eccitazione, varia la corrente di eccitazione, Ie, e quindi il flusso . Ora, Se diminuisce n0 cresce e viceversa mentre Tms cresce con . In particolare, se r’>r’’, Ie’<Ie’’ e la caratteristica si sposta verso destra e si inclina. Il punto di lavoro passa da P’’ a P’ con conseguente aumento di velocità di regime. Tms r’ r’’ P’ P’’ n0’’ n0'

86
Regolazione della Corrente di Eccitazione
Diminuendo la corrente di eccitazione, a parità di Ia e con Va=cost, si ottiene un incremento della velocità. Se Ie cala => cala (deflussaggio) ed n cresce. T Tn Tr La Ie può essere variata intervenendo su: reostati di protezione e regolazione della ecc.; tensione applicata al circuito di eccitazione indipendente. Al variare di Ie e di , con Va=Vn=cost, si modifica l’intercetta (vuoto e spunto) e la pendenza della curva
 ed n cresce. T. Tn. Tr. La Ie può essere variata intervenendo su: reostati di protezione e regolazione della ecc.; tensione applicata al circuito di eccitazione indipendente. Al variare di Ie e di , con Va=Vn=cost, si modifica l’intercetta (vuoto e spunto) e la pendenza della curva.")
87
Il confronto tra i limiti di prestazione per diversi valori della Ie viene fatto a parità di corrente di indotto Ia=In, qualunque sia la velocità. Se Ie=Ien allora n=nn e sviluppa la coppia Tm=Tmn. Tale coppia è la max. ottenibile. Diminuendo Ie con Van ed Ian costanti, l’aumento di velocità è accompagnato dalla diminuzione della coppia. La vel max. ottenibile (nL= nmax)è limitata da problemi di commutazione e di sollecitazioni meccaniche. Le caratteristiche statiche e della curva di carico mostrano come avviene il passaggio da una condizione di funzionamento ad un’altra, a meno del transitorio. T Tn Tr Con Van ed Ian costanti, la potenza convertita rimane costante (funzionamento a potenza costante).
è limitata da problemi di commutazione e di sollecitazioni meccaniche. Le caratteristiche statiche e della curva di carico mostrano come avviene il passaggio da una condizione di funzionamento ad un’altra, a meno del transitorio. T. Tn. Tr. Con Van ed Ian costanti, la potenza convertita rimane costante (funzionamento a potenza costante).")
88
Regolazione Combinata Va, Ie
Combinando le due regolazioni si ottiene un campo di variazione di velocità più vasto in quanto le vel.superiori vengono ottenute mediante deflussaggio mentre quelle inferiori riducendo la tensione di armatura. Tr T Tn

89
Regolazione con Resistenze Addizionali
Posso ottenere velocità ridotte inserendo resistenze sul circuito di armatura, mantenendo costante ai valori nominali, la Va e . Se Ra cresce n cala. Costa poco ma aumento le perdite. Tecnica utile all’avviamento o per brevi variazioni temporali Se Ra varia, varia la pendenza della caratteristica meccanica ma non varia il numero di giri a vuoto. A vuoto (Ia=0 => Tm=0) Se Ra cresce la coppia di spunto cala Allo spunto (n=0 => Tm=0)
 Se Ra cresce la coppia di spunto cala. Allo spunto (n=0 => Tm=0)")
90
Ecc. separata o in derivazione Ecc. Serie
Il confronto avviene con Ian=cost con n qualsiasi; essendo =cost => Tm=Tmn=cost T Tn Tr Ts T Tn Tr Ts Ecc. separata o in derivazione Ecc. Serie P n0 Tms Ra Rb Rc Rd Se è disponibile un reostato di avviamento modificabile a scatti, questi viene disinserito fino alla sua completa esclusione. Le caratteristiche cambiano pendenza ed il punto di lavoro si sposta su caratteristiche diverse fino equilibrio finale

91
Regolazione della Corrente di Eccitazione
Se facciamo variare il reostato di eccitazione, varia la corrente di eccitazione, Ie, e quindi il flusso . Ora, Se diminuisce n0 cresce e viceversa mentre Tms cresce con . In particolare, se r’>r’’, Ie’<Ie’’ e la caratteristica si sposta verso destra e si inclina. Il punto di lavoro passa da P’’ a P’ con conseguente aumento di velocità di regime. Tms r’ r’’ P’ P’’ n0’’ n0'

92
Regolazione della Tensione di Eccitazione
Questo controllo è più facile da realizzare da punti di vista degli amplificatori di potenza. L’inconveniente sta nel mantenere costante la corrente di armatura. Applicando la trasformata di Laplace

93
La prima f.d.t. è caratterizzata da due poli reali di cui uno elettrico e l’altro meccanico.
Per quanto riguarda la caratteristica meccanica (Tm=f(n, Ve)), si osserva che: Tm Ve Le caratteristiche coppia-velocità risultano parallele all’asse orizzontale.
), si osserva che: Tm. Ve. Le caratteristiche coppia-velocità risultano parallele all’asse orizzontale.")
94
Regolazione della Corrente di Armatura
Il miglioramento delle prestazioni di amplificatori di potenza ha reso accessibile questa tecnica per regolare motori di media potenza. Se il flusso è mantenuto costante, c’è diretta proporzionalità tra Tm ed Ia Tm A regime, la Tm è indipendente da e da . Le caratteristiche meccaniche T=f(n) risultano parallele all’asse orizzontale e parametrizzate in Ia.
 risultano parallele all’asse orizzontale e parametrizzate in Ia.")
95
Servomotori CC a Magneti Permanenti
2’ Servomotori CC a Magneti Permanenti Sostituisco la eccitazione con magneti permanenti composti da ferriti o da terre rare sinterizzate. Struttura Isotropa, non a concentrazione di flusso Le ferriti sono caratterizzate da prestazioni pari a circa 0.5 Nm/kg mentre le terre rare raggiungono circa i 0.7 Nm/kg La scelta è dettata da ragioni di costo (ferriti meno care delle terre rare) ma il rapporto coppie è diverso dal rapporto induzioni
 ma il rapporto coppie è diverso dal rapporto induzioni.")
96
4’ Se si considera il ciclo di isteresi dei due materiali (ferriti in basso), e fisso una caratteristica di lavoro, supponendo che la saturazione parta da circa 1.65, con le ferriti impiego meno ferro, i denti sono più stretti ed ho più spazio per il rame, a parità di diametro di alesatura. H B
, e fisso una caratteristica di lavoro, supponendo che la saturazione parta da circa 1.65, con le ferriti impiego meno ferro, i denti sono più stretti ed ho più spazio per il rame, a parità di diametro di alesatura. H. B.")
97
Tipicamente: 3 diametri (80 , 115 e 145 mm)
7’ 15” Tipicamente: 3 diametri (80 , 115 e 145 mm) Diverse lunghezze attive (taglia) Inclusa dinamo tachimetrica e (opzionale) freno di emergenza
 Diverse lunghezze attive (taglia) Inclusa dinamo tachimetrica e (opzionale) freno di emergenza.")
98
Limitazione di Coppia Continuativa (curva 1)
10’ 15” Limitazione di Coppia Continuativa (curva 1) Le perdite sono funzione della velocità angolare: a bassi giri si hanno principalmente perdite nel rame mentre se i giri crescono, crescono le perdite nel ferro. Nm rpm 2 1 A parità di perdite totali e di temperatura ammessa, le perdite del rame devono calare. Deve calare la Ia e quindi la coppia utile Limitazione di Smagnetizzazione (curva 2) Bisogna fare attenzione anche al limite di smagnetizzazione il quale viene riferito ad un valore di coppia di smagnetizzazione che risulta indipendente dalla vel. angolare ma che è legato alla azione congiunta di corrente di carico e temperatura.
 Le perdite sono funzione della velocità angolare: a bassi giri si hanno principalmente perdite nel rame mentre se i giri crescono, crescono le perdite nel ferro. Nm. rpm A parità di perdite totali e di temperatura ammessa, le perdite del rame devono calare. Deve calare la Ia e quindi la coppia utile. Limitazione di Smagnetizzazione (curva 2) Bisogna fare attenzione anche al limite di smagnetizzazione il quale viene riferito ad un valore di coppia di smagnetizzazione che risulta indipendente dalla vel. angolare ma che è legato alla azione congiunta di corrente di carico e temperatura.")
99
Esempi di Caratteristica
14’ 30” Esempi di Caratteristica Esempio di caratteristica di coppia con deflussaggio. Si nota l’andamento iperbolico di coppia limite. I limiti sono diversi in ragione del tipo di servizio (continuo o intermittente ). Il tipo di servizio intermittente deve essere verificato termicamente, dato il ciclo di carico. Le scale logaritmiche esaltano le differenze. I limiti di deflussaggio sono anche specificati tenendo conto della vita del collettore.
. Il tipo di servizio intermittente deve essere verificato termicamente, dato il ciclo di carico. Le scale logaritmiche esaltano le differenze. I limiti di deflussaggio sono anche specificati tenendo conto della vita del collettore.")
100
L’assenza del circuito di eccitazione diminuisce le perdite.
Si hanno diversi problemi di raffreddamento. Con le terre rare, la permeabilità magnetica è simile a quella dell’aria. Viene ridotta la influenza della reazione di indotto allargando il campo di funzionamento lineare (saturazione dovuta al rinforzo del campo sotto il corno di ingresso). Il rinforzo del campo tende a smagnetizzare localmente i magneti permanenti. Per proteggere i magneti dalla smagnetizzazione di reazione di indotto si possono introdurre delle scarpe polari in ferro dolce fornendo al flusso di armatura un circuito a bassa riluttanza
. Il rinforzo del campo tende a smagnetizzare localmente i magneti permanenti. Per proteggere i magneti dalla smagnetizzazione di reazione di indotto si possono introdurre delle scarpe polari in ferro dolce fornendo al flusso di armatura un circuito a bassa riluttanza.")
Presentazioni simili