Scaricare la presentazione
1
Motore Asincrono: Regime Stazionario
Si consideri una macchina asincrona con il rotore avvolto o a gabbia. Lo statore viene collegato ad una rete a potenza infinita con tensioni concatenate simmetriche e valore efficace costante. All’albero viene applicata una coppia resistente costante. Negli avvolgimenti di statore circola un sistema di correnti equilibrate (per le condizioni di simmetria costruttiva della macchina), limitate principalmente dalla fem indotta. Le correnti assorbite danno origine ad un campo magnetico rotante la cui espressione si deriva partendo da alcune ipotesi semplificative (Ipotesi di Campo): 1) permeabilità magnetica del ferro infinita (f= => Hf=0); 2) distribuzione del campo magnetico identica in tutti i piani perpendicolari all’asse di macchina (si trascurano gli effetti di bordo nelle testate);
, limitate principalmente dalla fem indotta. Le correnti assorbite danno origine ad un campo magnetico rotante la cui espressione si deriva partendo da alcune ipotesi semplificative (Ipotesi di Campo): 1) permeabilità magnetica del ferro infinita (f= => Hf=0); 2) distribuzione del campo magnetico identica in tutti i piani perpendicolari all’asse di macchina (si trascurano gli effetti di bordo nelle testate);")
2
3) andamento radiale delle linee di flusso al traferro (le componenti tangenziali del campo devono essere nulle. Si trascurano le perturbazioni di campo dovute alle cave). Con riferimento alla fondamentale, il campo rotante viene descritto dall’espressione: Il profilo dell’induzione al traferro viene descritto dalla relazione: Il flusso medio per polo si calcola tenendo conto della superficie del polo Sp=pl dove p è il passo polare ed l la lunghezza del pacco magnetico. Questo flusso, concatenandosi sia con lo statore che con il rotore, induce una f.e.m. il cui andamento è sinusoidale.

3
Se il rotore è fermo è possibile esplicitare l’espressione fasoriale delle f.e.m. indotte sullo statore e sul rotore: Dove m è il rapporto di trasformazione.Ks e Kr differiscono per il diverso coefficiente di avvolgimento. Se il rotore è di tipo avvolto, Er è misurabile ai morsetti aperti del rotore. Se il rotore ha i terminali aperti, nello statore viene assorbita una corrente di magnetizzazione che genera il campo rotante (e sostiene le perdite nel ferro) che vale: Is0 è circa i % di In contro il 5% dei trasformatori, a causa della presenza di un largo traferro. Possiamo immaginare che:
 che vale: Is0 è circa i % di In contro il 5% dei trasformatori, a causa della presenza di un largo traferro. Possiamo immaginare che:")
4
Allo spunto (avvolgimenti di rotore in corto), le f. e. m
Allo spunto (avvolgimenti di rotore in corto), le f.e.m. di rotore fanno circolare una terna di correnti equilibrate Ir nelle fasi di rotore: Le correnti di rotore generano, a loro volta, un campo rotante di rotore, sincrono con quello di statore. Il suo n°di poli è pari a quello di statore. Se il rotore è fermo, la velocità del campo rotante è identica alla velocità angolare del campo rotante di statore (induttore). Siamo in condizione di sincronismo tra campi magnetici rotanti. L’insieme delle forze che si esercitano tra conduttori di statore e di rotore determina la coppia motrice che trascina il motore in rotazione nella direzione di rotazione del campo rotante. Una volta che il rotore si è messo in movimento si ha una diversa velocità relativa tra campo rotante ed il rotore.
, le f.e.m. di rotore fanno circolare una terna di correnti equilibrate Ir nelle fasi di rotore: Le correnti di rotore generano, a loro volta, un campo rotante di rotore, sincrono con quello di statore. Il suo n°di poli è pari a quello di statore. Se il rotore è fermo, la velocità del campo rotante è identica alla velocità angolare del campo rotante di statore (induttore). Siamo in condizione di sincronismo tra campi magnetici rotanti. L’insieme delle forze che si esercitano tra conduttori di statore e di rotore determina la coppia motrice che trascina il motore in rotazione nella direzione di rotazione del campo rotante. Una volta che il rotore si è messo in movimento si ha una diversa velocità relativa tra campo rotante ed il rotore.")
5
Diminuisce la velocità con cui le linee di forza del campo tagliano le barre rotoriche e si modifica il regime elettrico indotto negli avvolgimenti di rotore. Per una generica pulsazione di rotore m = 2nm/60 e per l’assegnata pulsazione del campo rotante c = e / p (nc), i conduttori di rotore si concatenano con il campo rotante con una pulsazione c - m. Nel rotore si instaura un regime elettrico che dipende dalla velocità relativa c - m. Se ne tiene conto introducendo il concetto di scorrimento. Si definisce come scorrimento il rapporto tra la velocità relativa del campo rispetto al rotore: S esprime la frazione di giro che il rotore perde ogni giro completo del campo rotante.
, i conduttori di rotore si concatenano con il campo rotante con una pulsazione c - m. Nel rotore si instaura un regime elettrico che dipende dalla velocità relativa c - m. Se ne tiene conto introducendo il concetto di scorrimento. Si definisce come scorrimento il rapporto tra la velocità relativa del campo rispetto al rotore: S esprime la frazione di giro che il rotore perde ogni giro completo del campo rotante.")
6
Il periodo con cui un conduttore di rotore si concatena con il campo di di statore è:
ma Ne segue che Con riferimento alla frequenza, Il concatenamento con velocità ridotta origina grandezze elettriche caratterizzate da una frequenza ridotta rispetto a quella di alimentazione e pari a: e l’induzione di rotore può essere espressa come: Tenendo conto della relazione tra frequenze di rotore e statore:

7
In condizioni di perfetto sincronismo tra campo rotante e rotore vr=vc => s=0 =>
B(x’,t) è costante nel tempo. Il rotore vede un campo rotante fermo perché si stanno muovendo con la stessa velocità e cessa il fenomeno dell’induzione elettromagnetica di rotore e con esso la coppia motrice. La coppia resistente fa rallentare il motore, ma se la macchina rallenta s0 e quindi er(t)0 ed il rotore ridiventa sede di correnti e di coppia motrice. La macchina si porta in un punto di equilibrio in cui il ritardo del rotore sul campo rotante produce un regime di correnti tale da creare una coppia motrice che equilibra quella resistente.
 è costante nel tempo. Il rotore vede un campo rotante fermo perché si stanno muovendo con la stessa velocità e cessa il fenomeno dell’induzione elettromagnetica di rotore e con esso la coppia motrice. La coppia resistente fa rallentare il motore, ma se la macchina rallenta. s0 e quindi er(t)0 ed il rotore ridiventa sede di correnti e di coppia motrice. La macchina si porta in un punto di equilibrio in cui il ritardo del rotore sul campo rotante produce un regime di correnti tale da creare una coppia motrice che equilibra quella resistente.")
8
Il regime elettrico del rotore è determinato dalla velocità relativa tra campo rotante e rotore. La f.e.m. indotta sul rotore è legata alla frequenza del campo rotante visto dal rotore ed è pari a sapendo che fer=sf => La f.e.m. di rotore Er=Er(s)=sEr(s=1) varia al variare dello scorrimento. Lo scorrimento dipende dal carico, precisamente dalla coppia resistente che esso è chiamato a vincere. A vuoto Er(s=0)=0, non ci sono f.e.m. e quindi correnti nel rotore. Tenendo conto che il rotore è in corto, se applichiamo il II°p di Kirchoff ai circuiti elettrici di rotore possiamo scrivere che Er(s) fa circolare correnti con una frequenza fer.
=sEr(s=1) varia al variare dello scorrimento. Lo scorrimento dipende dal carico, precisamente dalla coppia resistente che esso è chiamato a vincere. A vuoto Er(s=0)=0, non ci sono f.e.m. e quindi correnti nel rotore. Tenendo conto che il rotore è in corto, se applichiamo il II°p di Kirchoff ai circuiti elettrici di rotore possiamo scrivere che. Er(s) fa circolare correnti con una frequenza fer.")
9
nr+(nc-nr)=nc [giri/min]
Le correnti di rotore generano a loro volta un campo magnetico rotante che ruota, rispetto al rotore con un numero di giri pari a nel verso di rotazione del campo induttore, cioè Il campo rotante di rotore si muove sul rotore che ha un numero di giri pari ad nr. Un osservatore esterno, solidale con lo statore vede un campo rotante di rotore che ruota con un numero di giri pari a nr+(nc-nr)=nc [giri/min] sincrono, cioè con il campo rotante di statore. Da questo si può desumere che il rotore ruota, rispetto allo statore con un numero di giri pari a nmr= nc- snc=(1-s) n c
![nr+(nc-nr)=nc [giri/min]](http://slideplayer.it/slide/577359/2/images/9/nr%2B%28nc-nr%29%3Dnc+%5Bgiri%2Fmin%5D.jpg "Le correnti di rotore generano a loro volta un campo magnetico rotante che ruota, rispetto al rotore con un numero di giri pari a. nel verso di rotazione del campo induttore, cioè. Il campo rotante di rotore si muove sul rotore che ha un numero di giri pari ad nr. Un osservatore esterno, solidale con lo statore vede un campo rotante di rotore che ruota con un numero di giri pari a. nr+(nc-nr)=nc [giri/min] sincrono, cioè con il campo rotante di statore. Da questo si può desumere che il rotore ruota, rispetto allo statore con un numero di giri pari a nmr= nc- snc=(1-s) n c.")
10
a rotore in movimento (s 1)
impedenza reattanza L2 induttanza R2 resistenza a rotore fermo (s = 1) a rotore in movimento (s 1) Con riferimento alle condizioni di corto possiamo scrivere: La Ir può essere vista come circolante in un rotore immobile (fr=fs) ma con un carico di tipo ohmico Rr/s:
 a rotore in movimento (s 1) Con riferimento alle condizioni di corto possiamo scrivere: La Ir può essere vista come circolante in un rotore immobile (fr=fs) ma con un carico di tipo ohmico Rr/s:")
11
Modello Elettrico di Macchina
Equazioni elettriche relative ad una singola fase di macchina La relazione tra fem indotta e flusso è data dalla: Le grandezze elettriche sono iso-frequenziali, quindi possono essere confrontate tra loro nel medesimo piano di Gauss. Il carico resistivo Rr/s può essere scomposto nella componente resistiva di rotore, Rr, e dell’immagine elettrica del carico Rr(1-s)/s. Le equazioni elettriche diventano: Il che equivale a una macchina a rotore bloccato le cui fasi alimentano una resistenza aggiuntiva di Rr(1-s)/s per fase.
/s. Le equazioni elettriche diventano: Il che equivale a una macchina a rotore bloccato le cui fasi alimentano una resistenza aggiuntiva di Rr(1-s)/s per fase.")
12
Analogia con il Trasformatore
Se si considerano le equazioni relative ad ogni fase di un motore asincrono trifase il cui rotore ha uno scorrimento s e riportiamo il circuito equivalente Rs Rr Xs Xr Es Er Vfs Is Ir Rr(1-s)/s Si nota subito la somiglianza con il circuito equivalente del trasformatore (a meno della magnetizzazione). se s=0 (sincronismo) Rr/s => : la macchina funziona come un trasf. a vuoto (secondario aperto) se s=1 (spunto) Rr/s => Rr : la macchina funziona come un trasf. in corto Rr(1-s)/s=0
/s. Si nota subito la somiglianza con il circuito equivalente del trasformatore (a meno della magnetizzazione). se s=0 (sincronismo) Rr/s => : la macchina funziona come un trasf. a vuoto (secondario aperto) se s=1 (spunto) Rr/s => Rr : la macchina funziona come un trasf. in corto. Rr(1-s)/s=0.")
13
Corrente a vuoto Iv V Ip Im Iv: corrente a vuoto
Rp X1 X2 Xm E1 E2 V I1t I1 I2 Ip Im Rp Xm Iv V Iv Im Ip Iv: corrente a vuoto Ip: corrente di perdita Im: corrente di magnetizzazione Ip<<Im

14
Perdite a vuoto sincrono (scorrimento nullo) Perdite a vuoto effettivo
perdite nel ferro primario Perdite a vuoto effettivo (coppia resa nulla) perdite nel ferro primario perdite meccaniche Cp = cifra di perdita a 1T e frequenza nominale [W] Pn = potenza nominale [W] n = velocità di rotazione [giri/min]
 perdite nel ferro primario. perdite meccaniche. Cp = cifra di perdita a 1T e frequenza nominale [W] Pn = potenza nominale [W] n = velocità di rotazione [giri/min]")
15
Il circuito equivalente diventa:
Rs Rr Ra Xs Xr Xm Es Er Vfs Is Ir I’s Rr(1-s)/s Da cui si può ricavare il diagramma fasoriale al pari dei trasformatori Si riporta la corrente di magnetizzazione ed il flusso da essa generato sull’asse reale. Sfasati di 90° il ritardo si riportano le fem indotte di statore e di rotore. Le cadute sull’impedenza caratteristica sul secondario chiudono il triangolo sulla fem di rotore. Le cadute sull’impedenza caratteristica di statore chiudono i fasori di tensione di fase e di fem di statore ...
/s. Da cui si può ricavare il diagramma fasoriale al pari dei trasformatori. Si riporta la corrente di magnetizzazione ed il flusso da essa generato sull’asse reale. Sfasati di 90° il ritardo si riportano le fem indotte di statore e di rotore. Le cadute sull’impedenza caratteristica sul secondario chiudono il triangolo sulla fem di rotore. Le cadute sull’impedenza caratteristica di statore chiudono i fasori di tensione di fase e di fem di statore ...")
16
Il diagramma fasoriale
jXsIs V RsIs -Es I’s Is Io Ia Im (Rr/s)Ir(s=1) Ir Er jXr(s=1)Ir(s=1) Es
Ir(s=1) Ir. Er. jXr(s=1)Ir(s=1) Es.")
17
E’ possibile ottenere un modello semplificato riportando il modello di rotore allo statore e viceversa. Il circuito equivalente visto dallo statore si ricava facilmente. Si considera la equazione elettrica di rotore: Si moltiplicano ambo i membri per il rapporto di trasformazione m e moltiplico per m/m solo il II° membro Ricordando che Si ha : Rs R’r Ra Xs X’r Xm Vfs Is I’r I’s R’r(1-s)/s
/s.")
18
Diagramma delle Correnti al Variare dello Scorrimento
Con il circuito equivalente ridotto è possibile verificare come variano le correnti di statore al variare dello scorrimento s. I° ipotesi semplificativa Le perdite meccaniche di rotore sono conglobate nelle perdite del ferro di statore (variazione effettiva dell’1% tra vuoto e carico). Ne segue che a vuoto s=0 ed Ir=0. Lo statore assorbe una corrente ed una potenza a vuoto pari a: II° ipotesi semplificativa Si trascurano le cadute di tensione sullo statore.
. Ne segue che a vuoto s=0 ed Ir=0. Lo statore assorbe una corrente ed una potenza a vuoto pari a: II° ipotesi semplificativa. Si trascurano le cadute di tensione sullo statore.")
19
Se applico all’asse una coppia resistente, il rotore rallenta ed in posizione di equilibrio scorre rispetto al campo rotante di s. Ciò determina una corrente rotorica pari a: A cui corrisponde una oltre che alla I0 Vediamo cosa succede al vettore I2(s) al variare di s. 1) Se s=0 ( vuoto) => 2) Se s=1 ( corto=spunto) =>
 al variare di s. 1) Se s=0 ( vuoto) => 2) Se s=1 ( corto=spunto) =>")
20
3) Se s= (ideale) => S= significa far ruotare artificialmente il rotore in senso opposto al campo rotante con velocità infinita. 2()=90° di ritardo su Er. Ciò significa che coincide con l’asse reale negativo Si può anche scrivere
=90° di ritardo su Er. Ciò significa che coincide con l’asse reale negativo. Si può anche scrivere.")
21
ma Con riferimento ai fasori, il triangolo O, P2, P2() è rettangolo in P2. Variando s, P2 descrive la semicirconferenza che ha come diametro Ir() . Un qualsiasi valore di coppia resistente determina una corrente di rotore pari ad Ir il cui vertice, P2, si muove lungo una semicircoferenza di diametro Ir(), i cui punti caratteristici sono l’origine degli assi e P2() sull’asse reale negativo. Il campo di variazione per Ir va da 0 a Ircc.
 . Un qualsiasi valore di coppia resistente determina. una corrente di rotore pari ad Ir il cui vertice, P2, si muove lungo una semicircoferenza di diametro Ir(), i cui punti caratteristici sono l’origine degli assi e P2() sull’asse reale negativo. Il campo di variazione per Ir va da 0 a Ircc.")
22
Corrispondentemente, allo statore viene richiamata una corrente I’s che si compone con la I0 per originare la Is. E’ facile verificare che il vertice del fasore Is si muove in corrispondenza al perimetro della semi circonferenza P0 , P1 , P1() . Il centro O1 della semi circonferenza si trova sull’orizzontale condotta per P0 ed il suo diametro è P0P1() rappresentato dal vettore I’s()=Ir()/m.
 . Il centro O1 della semi circonferenza si trova sull’orizzontale condotta per P0 ed il suo diametro è P0P1() rappresentato dal vettore I’s()=Ir()/m.")
23
I vettori condotti dall’origine O ai vari punti della semi circonferenza rappresentano le correnti assorbite dallo statore al variare di s Per s=0 => Ir=0 => I’s=0 => Is=I0 Per s=1 =>

24
O’ O A I0 Iscc Vf C j1 Is’ Is P Iscc rappresenta la corrente di corto circuito primaria (a tensione piena) e l’angolo relativo è l’angolo di corto Una volta dimostrate le caratteristiche, si fa riferimento al diagramma di statore per la possibilità di conoscere alcuni punti caratteristici tramite determinate misure.
 e l’angolo relativo è l’angolo di corto. Una volta dimostrate le caratteristiche, si fa riferimento al diagramma di statore per la possibilità di conoscere alcuni punti caratteristici tramite determinate misure.")
25
Diagramma Circolare o di Heyland
E’ un diagramma, a flusso costante, che consente di determinare lo stato della macchina in condizioni di stazionarietà a partire dal diagramma delle correnti di rotore e di statore. Per gli scopi pratici, è sufficiente fare riferimento alle sole correnti di statore. I° ipotesi semplificativa Le perdite meccaniche di rotore sono conglobate nelle perdite del ferro di statore. II° ipotesi semplificativa Si trascurano le cadute di tensione sullo statore. Tracciamento del diagramma circolare Per tracciarlo basta conoscere 2 punti del perimetro ed il centro. In particolare, interessano i punti che si possono facilmente verificare con prove di tipo come quella a vuoto (s=0) ed in corto circuito (s=1). La macchina è un carico simmetrico ed equilibrato. Bastano un voltmetro, un amperometro e due wattmetri in inserzione Aron.
 ed in corto circuito (s=1). La macchina è un carico simmetrico ed equilibrato. Bastano un voltmetro, un amperometro e due wattmetri in inserzione Aron.")
26
Schema di misura V A W13 W23 M La Prova a Vuoto Se Tr=0, s0. Con V si controlla la tensione nominale di fase mentre con A si misura la I0. Dai wattmetri si misura la potenza assorbita a vuoto (P0=W13+W23). Dalla lettura degli strumenti si determina il cos0. Noti I0 e cos0, si riporta il primo punto P0 del diagramma circolare. La Prova in Corto Circuito Si blocca il rotore (s=1) e si alimenta il motore con tensione ridotta Vfcc (Vfcc 1530 Vfn) in modo che circoli la corrente nominale di statore Is. Dai wattmetri si ricava la potenza assorbita P’scc.
. Dalla lettura degli strumenti si determina il cos0. Noti I0 e cos0, si riporta il primo punto P0 del diagramma circolare. La Prova in Corto Circuito. Si blocca il rotore (s=1) e si alimenta il motore con tensione ridotta Vfcc (Vfcc 1530 Vfn) in modo che circoli la corrente nominale di statore Is. Dai wattmetri si ricava la potenza assorbita P’scc.")
27
Si ricava il coscc si riportano le condizioni di corto dalla tensione ridotta a tensione piena (Isn=>Iscc) considerando che alimento sempre la stessa impedenza caratteristica di macchina a tensione ridotta e tensione piena, le potenze assorbite sono: eguagliando rispetto all’angolo di corto P’scc e P’scc forniscono le perdite Joule in condizioni nominali e di corto, rispettivamente.
 considerando che alimento sempre la stessa impedenza caratteristica di macchina. a tensione ridotta e tensione piena, le potenze assorbite sono: eguagliando rispetto all’angolo di corto. P’scc e P’scc forniscono le perdite Joule in condizioni nominali e di corto, rispettivamente.")
28
Per costruire il diagramma circolare si congiunge P0 e Pcc;
Si riportano sul grafico il modulo Iscc e l’angolo coscc e si ricava il secondo punto Pcc. Per costruire il diagramma circolare si congiunge P0 e Pcc; Dal punto di mezzo di P0Pcc si porta una perpendicolare; All’incrocio con la direzione orizzontale passante per P0 si ricava il centro del cerchio O’; Con centro O’ e raggio O’P0 si traccia un arco di cerchio che passerà per Pcc è il diagramma circolare Un qualsiasi punto P tracciato sul diagramma fornisce: la corrente assorbita (0P) La corrente rotorica riferita al primario (P0P) O’ O P0 I0 Icc Vf Pcc I’cc cc 0
 La corrente rotorica riferita al primario (P0P) O’ O. P0. I0. Icc. Vf. Pcc. I’cc. cc. 0.")
29
Fattore di Potenza e Diagramma Circolare
Dato un punto di lavoro P sul diagramma circolare posso determinare il cos su una apposita scala predisposta sul diagramma circolare. Si tracci un quarto di circonferenza nel primo quadrante e si tari una scala unitaria sull’asse verticale. Per ogni vettore di corrente, il relativo cos si determina proiettando sull’asse verticale la proiezione del punto di incontro della direzione del vettore di corrente con il cerchio di raggio unitario.

30
La lettura è diretta sulla scala predisposta.
Allo stesso modo posso leggere il cos0 ed coscc. Il motore viene costruito in modo tale da realizzare il max cos a pieno carico. Questa condizione si ha in corrispondenza alla direzione tangente al diagramma circolare, passante per l’origine. Il modulo della corrente nominale è proporzionale al segmento OP

31
Potenze, Perdite e Diagramma Circolare
Quando all’asse di un motore è applicata una coppia frenante Tr, lo statore assorbe dalla rete una potenza reale pari a: La corrente statorica, percorrendo gli avvolgimenti, determina le perdite per effetto Joule valutabili con la relazione: Il campo rotante statorico, generato dalla corrente magnetizzante, concatenandosi in modo variabile con il circuito magnetico statorico, determina le perdite nel ferro per isteresi magnetica e correnti parassite Tali perdite, essendo legate a fs ed a B2 (il flusso è costante), rimangono costanti da vuoto a carico. Vanno anche considerate le perdite addizionale dovute alle armoniche di campo. Le Norme CEI 2-6/80 le stimano uno 0.5% della Pa. La differenza tra Pa e Pfe+Pcus corrisponde alla potenza elettrica trasformata in meccanica dal campo magnetico PT (PT= Pa -Pfe-Pcus )
, rimangono costanti da vuoto a carico. Vanno anche considerate le perdite addizionale dovute alle armoniche di campo. Le Norme CEI 2-6/80 le stimano uno 0.5% della Pa. La differenza tra Pa e Pfe+Pcus corrisponde alla potenza elettrica trasformata in meccanica dal campo magnetico PT (PT= Pa -Pfe-Pcus )")
32
Affinchè tale interazione avvenga, è necessario che il rotore “scorra” rispetto al campo rotante. In questo modo, il fenomeno dell’induzione elettromagnetica genera delle correnti di rotore che generano il relativo campo rotante rotorico. La corrente rotorica determina a sua volta, delle perdite per effetto Joule pari a : La potenza meccanica generata sarà quindi: Pmg= PT -Pcur Si ricorda che nel rotore funzionante in condizioni normali, si possono trascurare le perdite nel ferro per la bassa frequenza delle grandezze elettriche. La potenza trasmessa e la potenza meccanica generata possono essere espresse in funzione della coppia generata e del numero di giri. In particolare, la potenza trasmessa dal campo magnetico rotante PT al rotore può essere vista come una coppia generata, Tg, per la pulsazione del campo rotante, c: PT = Tg c

33
Mentre la potenza meccanica generata sarà legata alla effettiva pulsazione di rotore m: Pm = Tg m
tenendo conto del bilancio delle potenze di rotore: Lo scorrimento può essere visto come rapporto tra perdite nel rame di rotore e potenza trasmessa del campo rotante. Alla potenza meccanica generata andranno sottratte le perdite meccaniche per attrito e ventilazione (Pmecc) che dipendono dalla velocità di rotazione. Possono essere considerate praticamente costanti al variare dalle condizioni di vuoto a quelle di carico. Si viene così a determinare la potenza utile che traina il carico.
 che dipendono dalla velocità di rotazione. Possono essere considerate praticamente costanti al variare dalle condizioni di vuoto a quelle di carico. Si viene così a determinare la potenza utile che traina il carico.")
34
Schema del bilancio delle potenze
rendimento potenza elettrica assorbita perdite rame statore perdite ferro statore potenza trasmessa al rotore perdite rame rotore potenza meccanica prodotta perdite meccaniche potenza resa Pr Schema del bilancio delle potenze

35
. La potenza assorbita dalla rete è:
Vf=cost. Per le diverse condizioni di carico si ha che Pa Is coss O’ O P0 I0 Icc P Pcc I’cc s Is A A0 Acc B . C Pa Po Bcc Se P è il punto di lavoro nel diagramma delle correnti, la sua proiezione sull’asse verticale è Is coss . Se si moltiplica la scala verticale per 3Vf , l’asse y viene tarato in una scala di potenze attive e tutto il diagramma circolare viene tarato in potenza funzione dello scorrimento s. Il segmento PA è a Pa . Analogamente, P0A0 è a P0 (P0 tiene conto di Padd , Pfe , Pcu0 se misurato con una prova a vuoto). Ora, il segmento BccAcc è a P0 per ipotesi, quindi il segmento PccAcc è a P0+Pcc ed il segmento PccBcc è a Pcc
. Ora, il segmento BccAcc è a P0 per ipotesi, quindi il segmento PccAcc è a P0+Pcc ed il segmento PccBcc è a Pcc.")
36
Se si considera la direzione P0Pcc , si dimostra che, per un dato carico (punto P), le perdite nel rame sono proporzionali al segmento BC. Dall’analisi della figura si rileva che i triangoli P0BC e P0BccPcc sono simili: BccPcc : BC = P0Bcc : P0B Anche i triangoli P0BccPcc e P0PccP sono simili perché rettangoli in Pcc e in Bcc ed P Pcc . P . . C . . . . Bcc B P P0 O A0 hanno l’angolo in P0 in comune => P0Bcc : P0Pcc = P0Pcc : P0P ne segue: P0Bcc = (P0Pcc )2 / P0P I triangoli P0BP e P0PP sono simili perché rettangoli in P e in B ed hanno l’angolo in P0 in comune => P0B : P0P = P0P : P0P => P0B = (P0P )2 / P0P Sostituendo i segmenti P0B e P0Bcc nella prima espressione di similitudine si ha che BccPcc : BC = P0Bcc : P0Bcc diventa
2 / P0P I triangoli P0BP e P0PP sono simili perché rettangoli in P e in B ed hanno l’angolo in P0 in comune => P0B : P0P = P0P : P0P => P0B = (P0P )2 / P0P Sostituendo i segmenti P0B e P0Bcc nella prima espressione di similitudine si ha che BccPcc : BC = P0Bcc : P0Bcc diventa.")
37
BccPcc : BC = (P0Pcc )2 / P0P : P0P / (P0P )2
ora, BccPcc è un segmento proporzionale a Pcc; P0Pcc e P0P sono segmenti proporzionali al modulo della corrente di corto e di carico, rispettivamente, ne viene che: (P0Pcc )2 (I’scc)2 e (P0P )2 (I’s)2 allora BccPcc : BC = (I’scc )2 : (I’s )2 e si conclude che BC = Pcc*(I’s /I’scc )2 Il segmento BC rappresenta le perdite nel rame per effetto Joule Pcus in corrispondenza al punto di lavoro P. Il segmento AC=AB+BC=P0+Pcus è proporzionale alle perdite totali di macchina quando questa lavora nel punto P. Ora, dato che il segmento AP è proporzionale a Pa, ne viene che il segmento PC=AP-AC=Pa-(P0+Pcus)=Pr è proporzionale alla potenza meccanica generata (Pr), disponibile all’asse del motore.
2 (I’scc)2 e (P0P )2 (I’s)2 allora. BccPcc : BC = (I’scc )2 : (I’s )2 e si conclude che. BC = Pcc*(I’s /I’scc )2. Il segmento BC rappresenta le perdite nel rame per effetto Joule Pcus in corrispondenza al punto di lavoro P. Il segmento AC=AB+BC=P0+Pcus è proporzionale alle perdite totali di macchina quando questa lavora nel punto P. Ora, dato che il segmento AP è proporzionale a Pa, ne viene che il segmento PC=AP-AC=Pa-(P0+Pcus)=Pr è proporzionale alla potenza meccanica generata (Pr), disponibile all’asse del motore.")
38
La direzione P0->Pcc prende il nome di retta delle potenze rese e fornisce una indicazione immediata della potenza resa all’asse per un determinato valore di scorrimento s. O Po I0 Icc Vf Pcc js Is’ Is Pass Pr Pp retta delle potenze assorbite retta delle potenze rese Pcu Pfe Se si conosce la resistenza di statore, Ps, o le perdite di statore in condizioni di cc Pccs (Pccs=3RsIscc2) allora è possibile determinare le perdite di statore e rotore a carico normale. O I0 Icc Vf perdite rame rotore perdite rame statore perdite a vuoto Pr Pcurot Pcustat P0 S = 0 S = 1
 allora è possibile determinare le perdite di statore e rotore a carico normale. O. I0. Icc. Vf. perdite rame rotore. perdite rame statore. perdite a vuoto. Pr. Pcurot. Pcustat. P0. S = 0. S = 1.")
39
Si riporta il valore Pccs sul segmento BccPcc e trovo il punto Dcc.
I segmenti BccDcc Pccs DccPcc Pccr in condizioni di corto. Per ottenere la separazione delle perdite nel rame di statore e di rotore per ogni altra P Pcc Pcc P Pa Is Icc . Dcc s I’cc . . . C . . . . Bcc Po D P0 B I0 O A0 A Acc O I0 Icc Vf perdite rame rotore perdite rame statore perdite a vuoto Pr Pcurot Pcustat P0 S = 0 S = 1 condizione di funzionamento si traccia la direzione P0Dcc. Sia D l’intercetta con il segmento BC. Si ha così che i segmenti BD Pcus e DC Pcur ne segue che PD PT infatti PD=PC+CD= Pm + Pr = PT

40
Coppia e Diagramma Circolare
Essendo che il segmento DP fornisce, in un’altra scala, anche la misura di coppia (Se as es. 1mm => 1W allora 1mm => 60/2nc J) La scala delle potenze viene ritarata in quella delle coppie. La direzione P0Dcc viene detta “retta delle coppie” e partendo da questa retta si possono rappresentare tutte le coppie sul diagramma circolare. Il rotore ruota con nm<nc e la potenza generata è la differenza viene dissipata in calore negli avvolgimenti I0 Icc V1 perdite rame rotore perdite rame statore perdite a vuoto Ptrasmessa Tg retta delle coppie
 La scala delle potenze viene ritarata in quella delle coppie. La direzione P0Dcc viene detta retta delle coppie e partendo da questa retta si possono rappresentare tutte le coppie sul diagramma circolare. Il rotore ruota con nm<nc. e la potenza generata è. la differenza viene dissipata in calore negli avvolgimenti. I0. Icc. V1. perdite rame rotore. perdite rame statore. perdite a vuoto. Ptrasmessa. Tg. retta delle coppie.")
41
Con riferimento al circuito equivalente delle m. a
Con riferimento al circuito equivalente delle m.a., la Pm impressa al rotore equivale alla potenza elettrica dissipata in una resistenza di carico fittizia tale che Sapendo che e Che è l’espressione della coppia già ricavata. Vi sono altri modi per ricavarla o definirla

42
fem indotta a rotore fermo
potenza elettrica trasmessa al rotore potenza meccanica trasmessa al rotore

44
si suppone F = cost. (in realtà F diminuisce all’aumentare del carico per effetto della reazione d’indotto del rotore, e quindi varia con lo scorrimento) . 2 4 6 8 1 T Tmax s

45
Il denominatore diventa minimo per
Coppia massima Il denominatore diventa minimo per lo scorrimento che corrisponde alla coppia massima è dato dal rapporto fra la resistenza e la reattanza a rotore fermo dell’avvolgimento d’indotto.

46
Coppia in funzione del flusso
(motore a 4 poli – n0 = 1500 g/min) 1500 1425 1350 1275 n (g/min) 1200 s 0,2 1,2 Fn 1,1 Fn Fn 0,9 Fn T 0,05 Tmax F scorrimento di coppia massima sm = 5%
 n (g/min) s. 0,2. 1,2 Fn. 1,1 Fn. Fn. 0,9 Fn. T. 0,05. Tmax. F. scorrimento di coppia massima sm = 5%")
47
R2a < R2b < R2c < R2d R2c = X0
T n s 1 n0 Tmax Tavv R2a R2b R2c R2d R2a < R2b < R2c < R2d R2c = X0 coppia massima scorrimento per la coppia massima sM = Rr/Xr coppia di avviamento massima per Rr = Xr (sm = 1)
")
48
Rapporto fra coppia di avviamento e coppia nominale
Funzionamento a carico nominale Rs Xs Xr Rr Is I’s I0 Ir Vf Es Er Ra Xm Funzionamento allo spunto (corto circuito) Rs Rr Ra Xs Xr Xm Es Er Vf Is Ircc I0 T æ I ö 2 s = s ç r cc ÷ ç ÷ T n è I ø n rn
 Rs. Rr. Ra. Xs. Xr. Xm. Es. Er. Vf. Is. Ircc. I0. T. æ. I. ö. 2. s. = s. ç. r. cc. ÷ ç. ÷ T. n. è. I. ø. n. rn.")
49
Coppia nominale, di spunto, massima e diagramma circolare
1500 1425 1350 1275 n (g/min) 1200 s 0,2 T 0,05 Tg Tm Va precisato che Tg = Tm + Tp e che Tp sono proporzionali alle perdite joule di rotore Il campo di funzionamento normale da TM a 0 (s=0). In tale intervallo lo scostamento tra nc ed nm è limitato (s => 25%) Come si può notare, i ragionamenti svolti su una curva possono essere estesi anche all’altra. Si deve anche tener presente l’approssimazione EsEf. Con il cambio di scala, il diagramma viene riferito alle coppie. In particolare, i segmenti DP e PC diventano proporzionale alla Tg ed alla Tm , rispettivamente, per una assegnato punto di lavoro P.
 s. 0,2. T. 0,05. Tg. Tm. Va precisato che. Tg = Tm + Tp. e che Tp sono proporzionali alle perdite joule di rotore. Il campo di funzionamento normale da TM a 0 (s=0). In tale intervallo lo scostamento tra nc ed nm è limitato (s => 25%) Come si può notare, i ragionamenti svolti su una curva possono essere estesi anche all’altra. Si deve anche tener presente l’approssimazione EsEf. Con il cambio di scala, il diagramma viene riferito alle coppie. In particolare, i segmenti DP e PC diventano proporzionale alla Tg ed alla Tm , rispettivamente, per una assegnato punto di lavoro P.")
50
su PM si ottiene il punto DM .
Variando s da 0 a 1, misurando tutti i relativi segmenti DP e DC riportandoli poi su un grafico Tg e Tm in funzione di s, si ottengono per via grafica le due caratteristiche meccaniche prima indicate. Se s=1 si valuta la coppia di spunto che corrisponde al segmento DccPcc. Tutta la PT viene dissipata sull’avvolgimento di rotore. Per TM basta valutare il segmento PD di lunghezza massima. E’ facile dimostrare che portando la tangente alla retta delle coppie sul diagramma circolare si ottiene un punto PM. Se si porta una verticale su PM si ottiene il punto DM . Il segmento PMDM è proporzionale alla TM. I0 Pcc Vf perdite rame rotore perdite rame statore perdite a vuoto TM Ts Tn In P C B A D Icc Dcc Bcc Acc PM

51
Resistenza di avviamento e diagramma circolare
Per migliorare l’avviamento si incrementa la resistenza di rotore con resistenze aggiuntive che verranno disinserite man mano che la macchina si avvia. Sappiamo che la modifica di Rr non modifica la TM. E’ possibile valutare sul d.c. il valore della Ragg per avere la coppia massima allo spunto. E’ sufficiente ruotare la retta delle coppie in modo che il punto Pcc coincida con il punto PM Se il rotore è senza reostato, allo spunto assorbe una corrente Icc sfasata di cc e la coppia di spunto è proporzionale a PccDcc. Vf PM Pcc Retta delle potenze rese con reost. I’cc Retta delle potenze rese senza reost. Icc Dcc ’cc D’cc Retta delle coppie cc I0

52
Icc è tanto minore quanto maggiore è Rr.
Se Rr cresce, la retta delle potenze rese si sposta perché aumentano le perdite di rotore mentre rimane invariata la posizione della retta delle coppie (PT non dipende da Rr). Il segmento P’ccD’cc > PccDcc. Icc è tanto minore quanto maggiore è Rr. T aumenta fino a TM poi torna a diminuire. La cond. di TM allo spunto è s=1 => Rr= Xr(1) => Ravv= Xr(1)- Rr. Il calcolo della Ravv con il d.c. è più preciso rispetto alla formula ma rimane l’approssimazione EsEf. Il segmento P’ccH è proporzionale alla potenza assorbita allo spunto P’ccH 3Ravv I’2cc I’cc assorbita allo spunto si legge direttamente dal segmento 0P’cc Vf PM Pcc Retta delle potenze rese con reost. I’cc H Retta delle potenze rese senza reost. Icc Dcc ’cc D’cc Retta delle coppie cc I0
. Il segmento P’ccD’cc > PccDcc. Icc è tanto minore quanto maggiore è Rr. T aumenta fino a TM poi torna a diminuire. La cond. di TM allo spunto è s=1 => Rr= Xr(1) => Ravv= Xr(1)- Rr. Il calcolo della Ravv con il d.c. è più preciso rispetto alla formula ma rimane l’approssimazione EsEf. Il segmento P’ccH è proporzionale alla potenza assorbita allo spunto. P’ccH 3Ravv I’2cc. I’cc assorbita allo spunto si legge direttamente dal segmento 0P’cc. Vf. PM. Pcc. Retta delle potenze rese con reost. I’cc. H. Retta delle potenze rese senza reost. Icc. Dcc. ’cc. D’cc. Retta delle coppie. cc. I0.")
53
Scorrimento e Diagramma Circolare
Sia s=Pcur/PT DC/DP Se s=0 ( a vuoto), P si sovrappone a P0 Se s=1 ( in corto), P si sovrappone a Pcc Si può ottenere sul d.c. una scala per la misura diretta di s. Si tracci una parallela alla retta delle coppie e si identifichi il segmento S0S Lo divido in 100 parti ed ottengo la scala di s. Lo scorrimento si legge prolungando la direzione OP fino ad intercettare la scala s.
, P si sovrappone a P0. Se s=1 ( in corto), P si sovrappone a Pcc. Si può ottenere sul d.c. una scala per la misura diretta di s. Si tracci una parallela alla retta delle coppie e si identifichi il segmento S0S1. Lo divido in 100 parti ed ottengo la scala di s. Lo scorrimento si legge prolungando la direzione OP fino ad intercettare la scala s.")
54
Rendimento e Diagramma Circolare
Sia =Pu/Pa PC/PA La lettura di può essere effettuata sul d.c. su una scala ottenuta prolungando la direzione P0Pcc fino a tagliare l’asse reale in R. In R porto una verticale t’. Traccio una generica retta orizzontale che intercetta le direzioni indicate nei punti E0E1. Taro E0E1 in 100 parti ed ottengo la scala . Per leggere prolungo PR fino ad incontrare la scala di e leggo la indicazione. Si noti che a vuoto E => E0

55
Curve Caratteristiche del Motore Asincrono
Il diagramma circolare consente di ricavare tutte le curve caratteristiche di macchina (Pa, Pu, Tg, Tm, cos, s, in funzione della corrente di carico basta immaginare di frenare gradatamente la macchina, da vuoto fino al corto. P si muove da P0 a Pcc ed Is varia da I0 ad Icc . Sui diversi diagrammi si leggono le relative grandezze e si riportano in funzione della Is.

57
Andamento qualitativo delle caratteristiche di un motore asincrono in funzione della potenza meccanica resa sull’asse h cosj1 I1 Pp s Presa 100% Pn

58
Studio della Caratteristica Tm(s) per -s+
Esaminiamo i possibili modi di funzionamento per le macchine asincrone: 1) Motore: Pe>0; Pm>0 U M 3 Pe Pm La macchina riceve potenza elettrica dalla rete, Pe, e la converte in potenza meccanica, Pm, che viene fornita al carico, U. 2) Generatore: Pe<0; Pm<0 Pe E’ la macchina primaria U che invia potenza meccanica al motore il quale la trasforma in elettrica e la invia in linea. M 3 U Pm
 Motore: Pe>0; Pm>0. U. M. 3 Pe. Pm. La macchina riceve potenza elettrica dalla rete, Pe, e la converte in potenza meccanica, Pm, che viene fornita al carico, U. 2) Generatore: Pe<0; Pm<0. Pe. E’ la macchina primaria U che invia potenza meccanica al motore il quale la trasforma in elettrica e la invia in linea. M. 3 U. Pm.")
59
Pm<0 se -s0 e se 1s+.
1) Freno: Pe>0; Pm<0 Pass Nella condizione di freno, la macchina riceve potenza sia dalla rete che dal carico e la dissipa al suo interno. M 3 U Pm Vediamo per quali intervalli di scorrimento si realizzano questi tipi di funzionamento per la macchina asincrona. A tal fine è sufficiente analizzare i segni di Pe e di Pm. A) per la Pm sappiamo che: ed il suo segno è dettato dal fattore Pm>0 se 0s1; Pm<0 se -s0 e se 1s+.
 Freno: Pe>0; Pm<0. Pass. Nella condizione di freno, la macchina riceve potenza sia dalla rete che dal carico e la dissipa al suo interno. M. 3 U. Pm. Vediamo per quali intervalli di scorrimento si realizzano questi tipi di funzionamento per la macchina asincrona. A tal fine è sufficiente analizzare i segni di Pe e di Pm. A) per la Pm sappiamo che: ed il suo segno è dettato dal fattore. Pm>0 se 0s1; Pm<0 se -s0 e se 1s+.")
60
B) Per la potenza elettrica Pe, trascuriamo le perdite nel ferro che sono costanti al variare di s, e mi riferisco al circuito equivalente trasformatorico riferito al primario: ~ Vfs Is Zs Is’ Z0 Zr’ I Ora, il circuito equivalente può essere visto come un parallelo tra Z0 e Zr’ Considero la formula del partitore di corrente in un parallelo e lo inserisco nella espressione della potenza elettrica, Pe.

61
L’analisi del segno di Pe si riconduce all’analisi del segno del trinomio al numeratore. Pe risulta positiva all’esterno dell’intervallo delimitato dagli zeri del polinomio, s1 ed s2. Se si fanno le seguenti ipotesi semplificative: =>

62
- + - + - + Pe>0 per -ss2 e per s1s+.
Cioè Pe<0 per s2ss1; Pe>0 per -ss2 e per s1s+. S2 S1 1 S - S - + - Pm - 1 Pm + - + S2 S1 Pe - Pe freno generatore freno motore freno s<s2 Freno 1<s s1<s<0 Generatore s2<s<s1 Motore s2<s<s1

63
Studio delle Armoniche nei Motori Asincroni
Ipotesi di campo: 1) permeabilità magnetica del ferro infinita (f= => Hf=0). 2) distribuzione del campo magnetico identica in tutti i piani perpendicolari all’asse di macchina (si trascurano gli effetti di bordo nelle testate). 3) andamento radiale delle linee di flusso al traferro (le componenti tangenziali del campo devono essere nulle). Con valore costante del campo al traferro ed in regime di linearità, il campo rotante può essere espresso in funzione di una sola variabile lineare, x, valutata lungo il perimetro del traferro. Si è già visto che il campo H è rettangolare lungo lo sviluppo planare e periodico perché valutato su una circonferenza p e x 4 poli
 permeabilità magnetica del ferro infinita (f= => Hf=0). 2) distribuzione del campo magnetico identica in tutti i piani perpendicolari all’asse di macchina (si trascurano gli effetti di bordo nelle testate). 3) andamento radiale delle linee di flusso al traferro (le componenti tangenziali del campo devono essere nulle). Con valore costante del campo al traferro ed in regime di linearità, il campo rotante può essere espresso in funzione di una sola variabile lineare, x, valutata lungo il perimetro del traferro. Si è già visto che il campo H è rettangolare lungo lo sviluppo planare e periodico perché valutato su una circonferenza. p. e. x. 4 poli.")
64
Essendo H(x) rettangolare e periodica, posso svilupparla in serie di Fourier:
dove => In presenza di q cave per polo e per fase sfasate tra loro del passo di cava, c, otteniamo una serie di q profili rettangolari sfasati tra loro del passo di cava, ognuno dei quali può essere sviluppato in serie.

65
Le fondamentali sono identiche ma risultano sfasate tra loro dell’angolo elettrico, c, che sottende il passo di cava, c. Il profilo delle Asp al traferro, sviluppato su un piano, è a gradini, con un andamento periodico a valor medio nullo. Il profilo dato dalla composizione delle fondamentali sfasate è ancora una funzione trigonometrica Il diverso sfasamento fa si che la somma algebrica delle onde differisca da quella geometrica (come nel caso delle f.e.m.). Introduciamo di nuovo il coefficiente di avvolgimento, Ka.
. Introduciamo di nuovo il coefficiente di avvolgimento, Ka.")
66
Ora ci ricordiamo della corrente che attraversa i conduttori ha una legge di variazione temporale in stato stazionario: L’espressione della f.m.m. è funzione di tempo t e di spazio x: Se applichiamo il teorema di Prostaferesi otteniamo:

67
Se vc è la velocità periferica di questo campo di f. m. m
Se vc è la velocità periferica di questo campo di f.m.m. ed e è la pulsazione elettrica, possiamo ipotizzare che nel medesimo tempo t* in cui un singolo polo investe un conduttore si ha una variazione di della grandezza elettrica. Quindi: La fondamentale di una fase può essere scomposta in due componenti che pulsano nel tempo con la stessa frequenza e che si muovono nello spazio con la stessa velocità e versi opposti (onda progressiva concorde con la direzione di x ed onda regressiva.

68
Sistema Trifase Equilibrato
L’onda di un campo magnetico stazionario generato al traferro da una corrente di fase sinusoidale è equivalente a due campi controrotanti di eguale ampiezza (1/2 HM) ed uguale velocità in modulo. Se si ripetono le stesse considerazioni per gli altri avvolgimenti sfasati di 120° e 240°, rispettivamente, abbiamo, per le fondamentali: Applichiamo di nuovo Prostaferesi.
 ed uguale velocità in modulo. Se si ripetono le stesse considerazioni per gli altri avvolgimenti sfasati di 120° e 240°, rispettivamente, abbiamo, per le fondamentali: Applichiamo di nuovo Prostaferesi.")
69
Per l’ipotesi di linearità, in ogni punto x del traferro e per ogni istante, i singoli campi si sommano in un campo risultante: Il secondo termine da la somma di tre vettori uguali in modulo e sfasati di 120° uno dall’altro che è uguale a zero. Il campo magnetico viene descritto dalla relazione al primo termine.

70
L’equazione: Descrive il campo magnetico rotante nello spazio con pulsazione c, sincrono con il campo di rotore, in condizioni di stazionarietà, che pulsa nel tempo seguendo l’andamento delle correnti che lo generano. Si conclude che in un sistema equilibrato di correnti, la somma delle componenti inverse del campo da esse generato si annullano mentre quelle dirette danno origine ad un unico campo rotante.

71
Le Armoniche di Ordine Superiore al I°
Si vogliono studiare gli effetti delle armoniche create dalla struttura a gradini del campo magnetico. Se si sviluppa un’onda quadra spaziale in serie di Fourier si nota che le armoniche si dispongono per coprire spazi proporzionali al passo polare, p. La fondamentale copre lo spazio di 2p prima di ripresentarsi uguale a se stessa; la terza armonica si presenta uguale a se stessa dopo (2p/3); la quinta dopo (2p/5) e così via. In generale, Fondamentale 5a armonica p p/5 Il passo della i-ma armonica è proporzionale all’inverso del proprio ordine rispetto al passo polare della fondamentale.
; la quinta dopo (2p/5) e così via. In generale, Fondamentale. 5a armonica. p. p/5. Il passo della i-ma armonica è proporzionale all’inverso del proprio ordine rispetto al passo polare della fondamentale.")
72
Se consideriamo la composizione di armoniche dovute alla presenza di q cave/polo/fase sfasate del passo di cava c si deve modificare anche il coefficiente di Blondel. Se Perché si riferisce a stelle di frequenza aumentata con un coefficiente pari all’ordine della armonica. Campo di i-ma armonica in avvolgimenti ad m fasi. Si considera la i-ma armonica della prima fase di un avvolgimento ad m fasi. L’espressione della relativa f.m.m. è:

73
Se si pone L’espressione diventa Per la seconda fase, e per le successive, devo tener conto dello sfasamento Con

74
L’espressione del campo di f. m. m
L’espressione del campo di f.m.m. dovute alle m fasi della i-ma armonica si ottiene sommando i singoli contributi. Si applica di nuovo Prostaferesi

75
Quindi Analizzando questi termini si vede che (K-1) è comunque un numero intero perché varia entro il numero di fasi, m (K=1=>m). Caso A). Se i termini (i-1)/m ed (i+1)/m sono interi, i prodotti (K-1)(i-1)/m ed (K-1)(i+1)/m sono multipli di 2 e mantengono in fase i contributi vettoriali delle sommatorie. La somma dei componenti è diversa da 0. Caso B). Se i termini (i-1)/m ed (i+1)/m non sono interi, le sommatorie che li contengono sono uguali a 0 perché stelle simmetriche di fasori. Oss.: non ci sono armoniche spaziali di ordine inferiore ad m, con l’eccezione della prima armonica inferiore a m se questo è pari.
. Se i termini (i-1)/m ed (i+1)/m sono interi, i prodotti. (K-1)(i-1)/m ed (K-1)(i+1)/m sono multipli di 2 e mantengono in fase i contributi vettoriali delle sommatorie. La somma dei componenti è diversa da 0. Caso B). Se i termini (i-1)/m ed (i+1)/m non sono interi, le sommatorie che li contengono sono uguali a 0 perché stelle simmetriche di fasori. Oss.: non ci sono armoniche spaziali di ordine inferiore ad m, con l’eccezione della prima armonica inferiore a m se questo è pari.")
76
Esempio: caso m=3 Fondamentale i=1 (m=3) Il primo termine entro parentesi si annulla perché è la sintesi di una stella di fasori equispaziati. La seconda sommatoria ci la la nota espressione del campo rotante

77
Terza Armonica i=3 (m=3) Se il sistema è connesso a stella, H3(x,t)=0. Sulla base di questo ragionamento, tutte le armoniche dispari multiple di 3 sono nulle. Quinta Armonica i=5 (m=3) La 5° armonica ruota in senso contrario rispetto alla fondamentale.
 La 5° armonica ruota in senso contrario rispetto alla fondamentale.")
78
Settima Armonica i=7 (m=3)
La 7° ruota in senso opposto alla 5° e nella stessa direzione della 1° Oss.: la 11°, la 13°, 17°………si calcolano allo stesso modo. Monofase m=1: ci sono tutte le armoniche dispari. Bifase m=2: ci sono tutte le armoniche ma ruotano in senso alternato. Dodecafase m=12: è presente la fondamentale; sono assenti tutte le armoniche fino alla 10°; dalla 11° in poi sono tutte presenti a versi alternati. Conclusione: sono presenti + campi rotanti oltre a quello della 1°arm.

79
Conclusione: il campo rotante che genera la coppia motrice è relativo alla fondamentale ma è accompagnato da una serie di armoniche , dovute all’andamento a gradini del campo originale, che generano a loro volta campi rotanti di 5°, 7°, 11°, 13°…. che ruotano con versi alterni. Con una opportuna scelta del riferimento si eliminano tutte le armoniche pari. Con la connessione a stella degli avvolgimenti si eliminano la 3° armonica e tutti i suoi multipli dispari. Le armoniche presenti hanno un indice i=3k1 (con k=0, 2, 4, 6..) le armoniche di ordine i=3k+1 ruotano nel verso della fondamentale. Quelle di ordine i=3k-1 ruotano nel verso opposto. Se sono presenti più campi rotanti, è necessario studiare la loro influenza sul rotore perché possono generare sistemi di correnti e quindi campi rotanti di ordine superiore.
 le armoniche di ordine i=3k+1 ruotano nel verso della fondamentale. Quelle di ordine i=3k-1 ruotano nel verso opposto. Se sono presenti più campi rotanti, è necessario studiare la loro influenza sul rotore perché possono generare sistemi di correnti e quindi campi rotanti di ordine superiore.")
80
Le Coppie Parassite nelle M.A.
Le armoniche di campo generano campi rotanti che interagiscono con il rotore dando origine a f.e.m. indotte e, quindi, a correnti di rotore che a loro volta generano il loro campo rotante (+armoniche relative). I campi armonici di rotore possono interagire con quelli di statore. La interferenza tra campi armonici di rotore e di statore può originare coppie parassite solo se: 1) ruotano alla stessa velocità e nella stessa direzione; 2) hanno lo stesso numero di poli. Se non sono verificate queste condizioni, le correnti indotte generano perdite Joule e coppie mediamente nulle ma istantaneamente diverse da zero (vibrazioni e rumore). Sappiamo che un campo che ruota con pulsazione s, pari ad una velocità meccanica c= s/p induce su un avvolgimento fermo un regime elettrico di pulsazione r = s.
. I campi armonici di rotore possono interagire con quelli di statore. La interferenza tra campi armonici di rotore e di statore può originare coppie parassite solo se: 1) ruotano alla stessa velocità e nella stessa direzione; 2) hanno lo stesso numero di poli. Se non sono verificate queste condizioni, le correnti indotte generano perdite Joule e coppie mediamente nulle ma istantaneamente diverse da zero (vibrazioni e rumore). Sappiamo che un campo che ruota con pulsazione s, pari ad una velocità meccanica c= s/p induce su un avvolgimento fermo un regime elettrico di pulsazione r = s.")
81
Si consideri la i-ma armonica della fase A:
Se si applica Prostaferesi si ha : in condizioni di stazionarietà, le funzioni trigonometriche della somma e della differenza delle variabili t ed x rappresentano onde rotanti a velocità costante. Se considero un osservatore solidale con l’onda in una posizione x1, al tempo t1 questi “vede” un’intensità di campo HiA(x1,t1). Se l’onda si muove con una velocità costante, v, dopo un tempo t il nostro osservatore si trova nella posizione x2 e misura un tempo t2. Se si considera un componente di campo valutati in H1: H1 H2 x2, t2 x1, t1
. Se l’onda si muove con una velocità costante, v, dopo un tempo t il nostro osservatore si trova nella posizione x2 e misura un tempo t2. Se si considera un componente di campo valutati in H1: H1. H2. x2, t2. x1, t1.")
82
Dopo un tempo t l’osservatore solidale con l’onda ha percorso uno spazio x alla velocità costante v. L’intensità H rimane inalterata. Allora: L’uguaglianza dei moduli sussiste se gli argomenti sono uguali La velocità dell’onda è: ora moltiplicando ambo i membri per 1/p e tenendo conto della relazione di sopra:

83
Un campo generato dalla i-ma armonica, che ruota con pulsazione
ci= s/ip, sempre rispetto allo statore, è come se fosse dotato di ip coppie polari. Possiamo studiare la i-ma armonica come se fossimo di fronte ad una macchina asincrona che ha ip coppie polari. Ne segue che lo studio degli effetti delle armoniche su una macchina a p coppie polari è equivalente allo studio di infinite macchine aventi ip coppie polari (i=3k1). Rotore in movimento (r) Si consideri un rotore che ruota con pulsazione r. Per la i-ma armonica, il processo di induzione è equivalente al caso di rotore fisso e campo rotante con velocità ridotta: sempre per gli effetti di quanto accade sul rotore, la pulsazione elettrica delle f.e.m. di armonica i-ma sarà: (macchina con ip coppie polari)
. Rotore in movimento (r) Si consideri un rotore che ruota con pulsazione r. Per la i-ma armonica, il processo di induzione è equivalente al caso di rotore fisso e campo rotante con velocità ridotta: sempre per gli effetti di quanto accade sul rotore, la pulsazione elettrica delle f.e.m. di armonica i-ma sarà: (macchina con ip coppie polari)")
84
L’armonica indotta ha kiip coppie di poli.
Queste f.e.m. fanno circolare correnti aventi la stessa pulsazione, le quali daranno origine ad altri campi rotanti di rotore contenenti armoniche. E’ il rotore che genera ulteriori armoniche di campo. Riassumendo: coppie polari equiv. di statore p 5p 7p 11p 13p ip campi armonici di statore 1° -5° 7° -11° 13° i° campo armonici di rotore 1°1 1°5 1°7 1°11 1°13 1°i 5°1 5°5 5°7 5°11 5°13 5°i 7°1 7°5 7°7 7°11 7°13 7°i k°1 k°5 k°7 k°11 k°13 k°i Si consideri il campo rotante induttore di ordine i e lo si consideri generato da una macchina equivalente di ip coppie polari rispetto alla macchina originale e si consideri la ki-ma armonica di rotore ad essa collegata. L’armonica indotta ha kiip coppie di poli.

85
Quale è la velocità meccanica di questo campo di ki-ma armonica di rotore ?
Rispetto allo statore si ha: Affinchè i campi armonici di rotore e di statore possano interferire, originando coppie parassite, devono ruotare alla stessa velocità e devono avere lo stesso numero di poli. Se esiste un campo armonico di statore di ordine che possa interferire con il campo armonico di rotore di ordine ki deve valere la condizione sulla velocità: l’espressione rappresenta la uguaglianza tra velocità assoluta della ° armonica di statore e quella della ki° armonica di rotore, indotta dal campo generato dalla i-ma armonica di statore. Ricordando che: l’equazione precedente vale

86
Semplificando, si ottiene:
A) condizione di uguale pulsazione B) stesso numero di poli , i e ki sono numeri interi. Si devono ricercare le combinazioni che portano al rispetto di A) e B). Si consideri la velocità di rotazione del campo generato dalla i-ma armonica di statore. Questo induce nel rotore delle correnti aventi una frequenza fri=sif con
 condizione di uguale pulsazione. B) stesso numero di poli. , i e ki sono numeri interi. Si devono ricercare le combinazioni che portano al rispetto di A) e B). Si consideri la velocità di rotazione del campo generato dalla i-ma armonica di statore. Questo induce nel rotore delle correnti aventi una frequenza fri=sif con.")
87
Ho dei nuovi campi prodotti da queste correnti che, rispetto al rotore, ruotano con velocità
(ki è l’ordine di armonica di rotore generata dalla armonica i di statore) la velocità vista dallo statore sarà: Ora, si consideri una generica armonica di statore, , con i. Affinchè si sviluppi una coppia è necessario che i campi di statore e rotore siano sincroni. Tra le tante combinazioni di i, ki e , si vede subito che se ki =1 => allora i=
 la velocità vista dallo statore sarà: Ora, si consideri una generica armonica di statore, , con i. Affinchè si sviluppi una coppia è necessario che i campi di statore e rotore siano sincroni. Tra le tante combinazioni di i, ki e , si vede subito che se ki =1 => allora i= ")
88
La condizione i= implica che se i prende valori in i=1, 5, 7, 11
La condizione i= implica che se i prende valori in i=1, 5, 7, 11.. si deve considerare solo la relativa fondamentale di rotore cioè, ki=1 Le coppie parassite possono nascere dalla interferenza dei campi armonici di statore con i fondamentali campi armonici di rotore. ki=1, per qualsiasi velocità, verifica la condizione A) (per qualsiasi condizione di s, tenendo però presente il segno da attribuire all’ordine della armonica). Se ki=1, allora è verificata anche la condizione B) perché Questa condizione corrisponde alla configurazione di una coppia parassita asincrona il cui il campo rotante indotto interagisce con il suo campo induttore. II°caso è possibile evidenziare una nuova condizione
 (per qualsiasi condizione di s, tenendo però presente il segno da attribuire all’ordine della armonica). Se ki=1, allora è verificata anche la condizione B) perché. Questa condizione corrisponde alla configurazione di una coppia parassita asincrona il cui il campo rotante indotto interagisce con il suo campo induttore. II°caso. è possibile. evidenziare una nuova condizione.")
89
Caratteristica Meccanica T=f(s), T=f(n) Completa
S=1 per diversi valori di ki. Ciò significa che allo spunto, dato che i campi di rotore e di statore hanno la stessa frequenza, ne viene che le armoniche di rotore e statore coincidono. Questa condizione implica la presenza di coppie parassite allo spunto o in corto circuito (s=1) Caratteristica Meccanica T=f(s), T=f(n) Completa Riassumendo: la f.m.m. ha un andamento a gradini la cui scomposizione in serie di Fourier mette in evidenza la presenza di armoniche che generano coppie parassite. In particolare, i=1 => f.m.m. fondamentale che origina un campo rotante con velocità di sincronismo pari a n0=60f/p; i=5 => f.m.m. di ordine 5 che origina un campo rotante con velocità di sincronismo pari a n5=-60f/5p=-n0/5 nel verso contrario alla 1°.
 Caratteristica Meccanica T=f(s), T=f(n) Completa. Riassumendo: la f.m.m. ha un andamento a gradini la cui scomposizione in serie di Fourier mette in evidenza la presenza di armoniche che generano coppie parassite. In particolare, i=1 => f.m.m. fondamentale che origina un campo rotante con velocità di sincronismo pari a n0=60f/p; i=5 => f.m.m. di ordine 5 che origina un campo rotante con velocità di sincronismo pari a n5=-60f/5p=-n0/5 nel verso contrario alla 1°.")
90
i=7 => f.m.m. di ordine 7 che origina un campo rotante con velocità di sincronismo pari a n7=60f/7p=n0/7 nel verso della fondamentale. i=11 => f.m.m. di ordine 11 che origina un campo rotante con velocità di sincronismo pari a n11=-60f/11p=-n0/11; nel verso contrario alla fondamentale. Lo scorrimento per la i-ma armonica vale: Di particolare importanza sono le coppie parassite di tipo asincrono dovute alle armoniche del 5° e 7° ordine perché possono modificare sensibilmente il valore e l’andamento della coppia dovuta alla interazione delle fondamentali.

91
Coppia di 5° la 5° armonica origina una coppia parassita che ha il verso opposto rispetto alla fondamentale. I giri di sincronismo sono pari a n5=-n0/5. Se si considera una macchina equivalente a quella assegnata, avente però ip numero di coppie polari, la espressione della coppia rimane invariata. Il profilo della caratteristica è invariato solo che l’attraversamento dell’asse orizzontale avviene nel semipiano negativo. T Tr la coppia di 5° si manifesta per valori di s<0, nella zona generatore e freno. Nella zona motore (0-s-1) si ha una riduzione di coppia quasi uniforme e comunque di limitata entità.
 si ha una riduzione di coppia quasi uniforme e comunque di limitata entità.")
92
Caratteristica Completa
Coppia di 7° con analoghe considerazioni, si perviene al tracciamento della coppia parassita di ordine 7. I giri di sincronismo sono pari a n7=n0/7. Questo grafico mette in evidenza un insellamento della caratteristica in corrispondenza di n0/7 che si trova nel campo di valori di scorrimento per il motore. A parte casi particolari, non ci si preoccupa dell’effetto dei campi di 11° e 13° etc. T Tr L’ampiezza del campo di 13° è ridotto mentre la 11°, ruotando in senso opposto alla fondamentale, si fa sentire nel campo generatore. Caratteristica Completa Se si sommano per punti le caratteristiche di ordine 1, 5 e 7, si ottiene una caratteristica completa più aderente alla realtà.

93
T Tr . A B C In presenza di una coppia resistente con andamento rappresentato in figura, i punti di equilibrio sono 3. A e C sono stabili mentre B è instabile. In fase di avviamento, la velocità cresce fino al punto C, poi non aumenta oltre. Questo fenomeno è noto come impuntamento di 7° armonica. Rumorosità Se si considerano le interferenze tra campi di statore e di rotore, con un diverso numero di poli, la configurazione periferica dei flussi segue una legge di battimenti. Essa presenta dei massimi e dei minimi lungo la periferia del traferro. Il numero dei cicli della configurazione è uguale alla differenza tra i

94
numeri di paia di poli dei due campi interagenti.
La configurazione ruota, rispetto allo statore, con velocità pari a dove ps e pr sono i numeri di coppie polari dei campi interferenti ed ns ed nr le rispettive velocità riferite allo statore. I casi più pericolosi sono quelli in cui i numeri di poli differiscono di due e di quattro, rispettivamente. Nel primo caso si ha una distribuzione di un solo ciclo che presenta un massimo ed un minimo di flusso diametralmente opposti. Questi danno origine ad una attrazione unilaterale sul rotore e quindi, se le caratteristiche elastiche dell’albero lo consentono, una deformazione o delle vibrazioni che possono cadere in campo acustico. Nel secondo, la configurazione presenta due cicli con massimi diametralmente opposti e minimi in quadraturacon ovoidalizzazione dei cuscinetti e vibrazioni in campo acustico.

95
possono verificarsi vibrazioni se è:
Vibrazioni nel rotore si possono verificare se è Vibrazioni nello statore si possono verificare se è nel rotore: C2 = 19, 21, 23, 25, 27, 29 nello statore: C2 = 18, 22, 26, 30 possono verificarsi vibrazioni se è: esempio: p = 4 e C1 = 24 a 50 Hz la frequenza delle vibrazioni è in ogni caso di 600 p/s

96
Provvedimenti per ridurre i fenomeni indesiderati
per eliminare questi inconvenienti è necessario scegliere opportunamente il numero delle cave di rotore, inclinare le cave rispetto all’asse della macchina, adottare avvolgimenti di statore a passo accorciato, e scegliere ampiezze di traferro non troppo ridotte. in ogni caso è necessario evitare di scegliere un numero di cave di rotore uguale a quello di statore o che differisca di un numero di cave eguale al numero dei poli. Va tuttavia sottolineato il fatto che i fenomeni vibratori possono essere causati anche da squilibri meccanici e da squilibri elettromagnetici.

97
Motore di piccola potenza con rotore a gabbia
cave di rotore inclinate rispetto a quelle di statore

98
I Rotori a Gabbia conduttori attivi anelli di corto circuito alette di raffreddamento I rotori a gabbia semplice sono costituiti da un solo conduttore per cava (alluminio pressofuso cetrifugato per piccole potenze, barre di alluminio elettrolitico per grandi potenze), non isolato rispetto a massa, le cui estremità sono collegate in corto da anelli frontali (saldati per potenze elevate). La gabbia non ha un numero di poli proprio, prefissato, ma “copia” il numero di poli dello statore per effetto dell’induzione elettromagnetica.
, non isolato rispetto a massa, le cui estremità sono collegate in corto da anelli frontali (saldati per potenze elevate). La gabbia non ha un numero di poli proprio, prefissato, ma copia il numero di poli dello statore per effetto dell’induzione elettromagnetica.")
99
Le singole barre vengono. investite dal campo rotante ed
Le singole barre vengono investite dal campo rotante ed ognuna di esse si concatena con una quota di flusso magnetico che dipende dalla posizione angolare relativa tra barra ed onda. Con riferimento alla figura, le prime 7 barre si concatenano con un flusso di segno positivo dando origine a 7 f.e.m. che sono sfasati tra loro di dove Zr è il numero di cave di rotore.

100
Sotto il polo di segno contrario, le barre sono interessate dallo stesso flusso ma di segno contrario al precedente. La gabbia è sottoposta ad un regime di fem indotte che si ripetono periodicamente un numero di volte pari al n.di coppie polari di statore. Lo stesso avvolgimento di rotore può “copiare” un n.di poli di statore fino ad un massimo di Zr. Si genera un sistema di correnti equilibrate, limitate dalle resistenze e dalle reattanze di barre ed anello. Le fem generano delle correnti nelle gabbie che si chiudono negli anelli frontali, limitate dalle resistenze e dalle reattanze di barre ed anello. Le relazioni elettriche si determinano studiando un modello semplificato che considera una maglia chiusa composta da due barre e la porzione di anello che le unisce. Is Ia

101
Se si applica il I°K al nodo A si ha:
Applicando il II°K alla maglia composta da due barre sfasate dell’angolo elettrico c e dal tratto di anello che le chiude: Rb Ra Xb Xa Ia1 Ia0 Ia2 Ib1 Ib2 Eb1 A B Se si applica il I°K al nodo A si ha: Per la simmetria del circuito, la fase della f.e.m. e della corrente di barra differiscono da quella adiacente per l’angolo elettrico c Lo stesso vale per segmenti circolari adiacenti di anello:

102
Ora Tenendo conto degli sfasamenti, si può scrivere che Analogamente Sostituendo nella equazione dal II°K Dividendo per (1-e) ed evidenziando la Ib1 Sapendo che: Sostituendo:
 ed evidenziando la Ib1. Sapendo che: Sostituendo:")
103
Questa relazione mostra che si può tenere conto degli effetti degli anelli aumentando l’impedenza di ciascuna barra della quantità: Se si considera che si hanno Zr/m cave di rotore per fase, allora si possono definire le resistenze e le reattanze di fase di rotore che tengono anche conto degli anelli

104
La relazione tra intensità di corrente di barra e di anello si determina considerando un generico nodo di giunzione. Ib Ib Ia Ia I’a Ib Ia I’a ac c: angolo elettrico fra due cave vicine Zr : numero di cave della gabbia per Zr grande, ac piccolo

105
I motori asincroni a gabbia semplice assorbono allo spunto una corrente elevata che non sempre è tollerata dall’impianto (Is=56 In) a cui corrisponde una coppia di spunto bassa (Ts10%Tn). Si sfrutta il fenomeno dell’addensamento di corrente per migliorare lo spunto (aumentare la coppia e diminuire la corrente). Fenomeni di addensamento di corrente Una corrente variabile nel tempo che circola in un conduttore genera un campo magnetico nello spazio circostante che si concatena anche con il conduttore stesso. Se il conduttore è inserito in una cava, la concatenazione non è uniforme (come nei cavi). La sezione 4 si concatena con tutto il flusso mentre le sezioni 3, 2 ed 1, si concatenano con un flusso via via meno intenso. Le f.e.m. indotte e le correnti che circolano di conseguenza, sono via via meno intense partendo dal fondo cava (4) per arrivare all’apertura di cava (1).
. Fenomeni di addensamento di corrente. Una corrente variabile nel tempo che circola in un conduttore genera un campo magnetico nello spazio circostante che si concatena anche con il conduttore stesso. Se il conduttore è inserito in una cava, la concatenazione non è uniforme (come nei cavi). La sezione 4 si concatena con tutto il flusso mentre le sezioni 3, 2 ed 1, si concatenano con un flusso via via meno intenso. Le f.e.m. indotte e le correnti che circolano di conseguenza, sono via via meno intense partendo dal fondo cava (4) per arrivare all’apertura di cava (1).")
106
Il fenomeno è in diretta relazione con la frequenza.
Queste correnti hanno verso contrario alla causa che le generano (la corrente circolante che genera il campo magnetico). La corrente complessiva circolante in cava si riduce in 4 rispetto ad 1 (effetto pelle). Il fenomeno è in diretta relazione con la frequenza. Due sono le conseguenze: aumentano la resistenza e le perdite. Aumento delle perdite: Si consideri un conduttore massiccio, di sezione S=hb, di resistenza R, attraversato dalla corrente I a densità costante. Le perdite Joule sono: P=RI2 Ora si suppone che una quota di corrente i si addensi nella metà superiore dalla metà inferiore. In totale, la corrente del conduttore è sempre I. Lo schema di riferimento è equivalente a due conduttori in parallelo, ognuno avente sezione S/2 e resistenza 2R rispetto a sopra. R I h b h/2 b 2R ; I+i 2R ; I-i
. La corrente complessiva circolante in cava si riduce in 4 rispetto ad 1 (effetto pelle). Il fenomeno è in diretta relazione con la frequenza. Due sono le conseguenze: aumentano la resistenza e le perdite. Aumento delle perdite: Si consideri un conduttore massiccio, di sezione S=hb, di resistenza R, attraversato dalla corrente I a densità costante. Le perdite Joule sono: P=RI2. Ora si suppone che una quota di corrente i si addensi nella metà superiore dalla metà inferiore. In totale, la corrente del conduttore è sempre I. Lo schema di riferimento è equivalente a due conduttori in parallelo, ognuno avente sezione S/2 e resistenza 2R rispetto a sopra. R. I. h. b. h/2. b. 2R ; I+i. 2R ; I-i.")
107
Aumento delle resistenze:
La corrente che fluisce nelle due metà è sempre la stessa ma le perdite Joule cambiano 2R I+i 2R I-i I La non uniforme distribuzione di corrente provoca una aumento di perdite. Aumento delle resistenze: Si consideri una cava di tipo rettangolare Sc=hcbc occupata da un conduttore pieno di sezione S=hb. Si fanno le seguenti ipotesi:

108
2) li linee di campo in cava sono parallele tra loro;
1) f => =0; 2) li linee di campo in cava sono parallele tra loro; 3) le linee di campo sono perpendicolari alla uperfice di cava; 4) la permeabilità in cava è 0. Con queste ipotesi, lo studio del problema dell’addensamento di corrente da 3D diventa lineare, nella sola direzione x. dx hc h x b bc Sia (x) la densità di corrente nella sezione infinitesimale dS(x)=dxb posta a distanza x dal fondo cava (riferimento); Sia dH(x) l’intensità locale del campo magnetico. Con riferimento alla figura, nella sezione dS(x) circola una corrente: dI(x)= (x).b.dx per il teorema di Ampere dI(x)= dH(x).bc uguagliando
 f => =0; 2) li linee di campo in cava sono parallele tra loro; 3) le linee di campo sono perpendicolari alla uperfice di cava; 4) la permeabilità in cava è 0. Con queste ipotesi, lo studio del problema dell’addensamento di corrente da 3D diventa lineare, nella sola direzione x. dx. hc. h. x. b. bc. Sia (x) la densità di corrente nella sezione infinitesimale dS(x)=dxb posta a distanza x dal fondo cava (riferimento); Sia dH(x) l’intensità locale del campo magnetico. Con riferimento alla figura, nella sezione dS(x) circola una corrente: dI(x)= (x).b.dx per il teorema di Ampere dI(x)= dH(x).bc. uguagliando.")
109
Dalla leggi di Maxwell e dalle leggi di legame materiale:
Uguagliando e considerando le condizioni di sopra: Se l’intensità del campo H varia sinusoidalmente nel tempo e la relazione diventa Che è una equazione differenziale del secondo ordine a coefficienti costanti.

110
La soluzione è del tipo Le costanti A e B si determinano dalle condizioni iniziali. Se x=0 allora H=0; => A+B=0 => A=-B Se x=h allora H=I/bc => => Risolvendo rispetto a B: Se consideriamo la soluzione generale, tenendo conto delle costanti:

111
Quindi: Tenendo ora conto della relazione tra H(x) e (x) si ha che: Riassumendo, in un conduttore in cava rettangolare, l’andamento di H(x) e (x) seguono le due leggi: I cui andamenti possono essere schematizzati come segue:
 e (x) seguono le due leggi: I cui andamenti possono essere schematizzati come segue:")
112
L’addensamento di corrente modifica anche le reattanze (si trascura).
Lo spostamento della corrente nelle sezioni superiori del conduttore può essere visto come una riduzione della sua sezione con conseguente aumento della resistenza in cc. Il coeff. k si ricava dallo studio più accurato del fenomeno (in Costruzioni Elettromeccaniche). In generale: L’addensamento di corrente modifica anche le reattanze (si trascura). Addensamento di corrente nei conduttori di statore Nelle cave di statore sono di solito presenti nc conduttori o, nel caso di un solo conduttore, ns sezioni in parallelo che risentono del fenomeno. Per diminuire gli effetti negativi, vengono effettuate le permutazioni o trasposizioni di sezione. Se n è il numero delle sezioni ed l è la lunghezza dei conduttori, ogni s/l m vengono ruotate le sezioni. resistenza di rotore R2 alla frequenza di rotore f2 (R2dc = resistenza di rotore in continua)
. In generale: L’addensamento di corrente modifica anche le reattanze (si trascura). Addensamento di corrente nei conduttori di statore. Nelle cave di statore sono di solito presenti nc conduttori o, nel caso di un solo conduttore, ns sezioni in parallelo che risentono del fenomeno. Per diminuire gli effetti negativi, vengono effettuate le permutazioni o trasposizioni di sezione. Se n è il numero delle sezioni ed l è la lunghezza dei conduttori, ogni s/l m vengono ruotate le sezioni. resistenza di rotore R2 alla frequenza di rotore f2 (R2dc = resistenza di rotore in continua)")
113
Il conduttore in posizione “1” viene spostato in posizione “4”, “4” in “3”, “3” in “2” e “2” in “1”.
In questo modo, il +i che attraversa “1” in posizione inizio cava compensa parzialmente il -i che si ha quando è in fondo cava, e così via. La compensazione è solo parziale ma la trasposizione aiuta molto a ridurre le perdite aggiuntive dovute alla non uniforme distribuzione della densità di corrente. Addensamento di corrente nei conduttori di rotore. Nel rotore si sfrutta l’aumento di resistenza per migliorare la coppia di spunto. Allo spunto, i conduttori sono investiti da un campo a frequenza piena e la corrente viene spinta verso l’esterno. A regime, per effetto dello scorrimento limitato, la frequenza delle grandezze elettriche di rotore è bassa ed il fenomeno può essere trascurato. Gabbia a barre profonde È composta da una gabbia a barra singola ma con una forma piuttosto allungata per sfruttare maggiormente l’effetto pelle ed il conseguente

114
aumento di resistenza nei conduttori di rotore allo spunto.
La forma rettangolare è la più semplice da studiare ma se è profonda restringe notevolmente lo spessore del dente in corrispondenza al fondo cava portandolo in saturazione. Per questo motivo sono proposte cave di forma diversa, la più utilizzata delle quali è la forma lanceolata ( c). Con la forma di tipo (b) il fenomeno è accentuato. (c) (d) (a) (b) sat La resistenza effettiva dipende dalla frequenza, dalle profondità e dalla forma della gabbia e dalla resistività del conduttore. La resistenza si determina con simulazioni che producono grafici utili al progetto, come quello riportato in fig.
. Con la forma di tipo (b) il fenomeno è accentuato. (c) (d) (a) (b) sat. La resistenza effettiva dipende dalla frequenza, dalle profondità e dalla forma della gabbia e dalla resistività del conduttore. La resistenza si determina con simulazioni che producono grafici utili al progetto, come quello riportato in fig.")
115
La doppia gabbia (Boucherot)
È composta da una gabbia più esterna di materiale con resistività più elevata e da una gabbia interna di materiale a bassa resistività (es. bronzo- alluminio). Le forme si ispirano a combinazioni di forme per gabbia semplice (esterna) e a barre profonde (interna). Viene riportato un andamento qualitativo del flusso da cui si vede che il flusso concatenato della barra inferiore è maggiore di quella superiore. La differenza è legata alla diversità della forma delle due barre Il flusso concatenato con la gabbia secondaria investe anche il traferro (m ridotta) Il flusso concatenato con la gabbia primaria investe il traferro solo parzialmente (m elevata)
. Le forme si ispirano a combinazioni di forme per gabbia semplice (esterna) e a barre profonde (interna). Viene riportato un andamento qualitativo del flusso da cui si vede che il flusso concatenato della barra inferiore è maggiore di quella superiore. La differenza è legata alla diversità della forma delle due barre. Il flusso concatenato con la gabbia secondaria investe anche il traferro (m ridotta) Il flusso concatenato con la gabbia primaria investe il traferro solo parzialmente (m elevata)")
116
Le gabbie sono caratterizzate da:
rotore statore gabbia superiore Rs ; Xs gabbia inferiore Ri ; Xi h Le gabbie sono caratterizzate da: superiore: elevata Rs (barre ed anelli di piccola sezione ed elevata resistività) limitata Xs (prossimità del traferro, dimensioni contenute). inferiore: bassa Ri (barre ed anelli di grande sezione e bassa resistività) elevata Xi (barre di forma allungata immerse nel ferro). All’avviamento (s=1), le X hanno il valore massimo. Si possono trascurare le R in rapporto alle X. Allora In funzionamento nominale (s<0.06) le X hanno valori molto bassi e possono essere trascurate rispetto alle resistenze.
 limitata Xs (prossimità del traferro, dimensioni contenute). inferiore: bassa Ri (barre ed anelli di grande sezione e bassa resistività) elevata Xi (barre di forma allungata immerse nel ferro). All’avviamento (s=1), le X hanno il valore massimo. Si possono trascurare le R in rapporto alle X. Allora. In funzionamento nominale (s<0.06) le X hanno valori molto bassi e possono essere trascurate rispetto alle resistenze.")
117
La R equivalente è pari al parallelo delle due e Re è Ri.
Il circuito equivalente riportato allo statore che ne deriva è composto da due impedenze equivalenti di rotore poste in parallelo, tali che: X’s R’s/s Is Rs Xs X’i R’i/s Vf La Caratteristica Meccanica E’ il risultato della composizione di due contributi di coppia, quello relativo alla gabbia esterna a maggiore resistenza e quella interna a minore resistenza. Tm Ta

118
La Classificazione delle Macchine Asincrone
Vengono classificate in 4 classi, in base al tipo di coppia di spunto. Tipo A => Ts << Tmax Corrisponde alla m.a. con gabbia semplice. Ha buone prestazioni a carico e modeste all'avviamento; basso scorrimento a pieno carico; elevato. Tmax è superiore al 100% Tn. L’Elevata Iccs costringe ad avviamenti con basso carico a tensione piena o con più carico ma a tensione ridotta (avviamento stella/triangolo: stella all’avviamento). Il tipo A è std per potenze sotto i 10 kW. Tipo B => Ts Tmax si può impiegare per spunti su carichi maggiori con correnti minori. Impiega doppie gabbie o barre profonde. S ed sono simili al tipo A. L’elevata X fa diminuire il cos e la Tmax. E’ usato in azionamenti per soffianti, pompe e macchine utensili.
. Il tipo A è std per potenze sotto i 10 kW. Tipo B => Ts Tmax. si può impiegare per spunti su carichi maggiori con correnti minori. Impiega doppie gabbie o barre profonde. S ed sono simili al tipo A. L’elevata X fa diminuire il cos e la Tmax. E’ usato in azionamenti per soffianti, pompe e macchine utensili.")
119
Tipo C => Ts >Tmax
M.A. con doppia gabbia e resistenza rotorica più elevata rispetto al tipo B e bassa Iccs. Vanno contrapposti un inferiore ed s superiore rispetto ai motori dei tipi A e B. Impieghi tipici sono l'azionamento di compressori e di nastri tasportatori. Tipo D => Ts >> Tmax con s elevato Ha un rotore con gabbia semplice ad elevata resistenza (ottone). Anche la Tmax è elevata e presentano s > al 50% . Alti valori di s e basso lo rendono indicato per azionamenti di carichi intermittenti che richedano gravose accelerazioni o di carichi impulsivi quali, ad esempio, presse e tranciatrici (il motore viene solitamente accoppiato ad un volano che aiuta a fornire l'energia impulsiva e riduce le pulsazioni di potenza sulla rete di alimentazione).
. Anche la Tmax è elevata e presentano s > al 50% . Alti valori di s e basso lo rendono indicato per azionamenti di carichi intermittenti che richedano gravose accelerazioni o di carichi impulsivi quali, ad esempio, presse e tranciatrici (il motore viene solitamente accoppiato ad un volano che aiuta a fornire l energia impulsiva e riduce le pulsazioni di potenza sulla rete di alimentazione).")

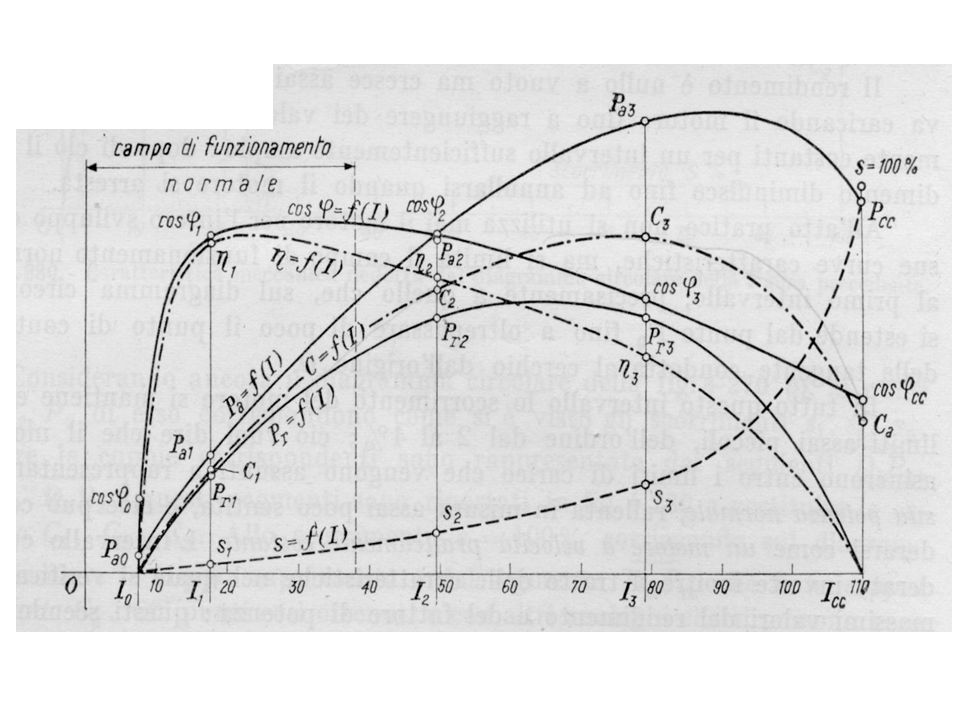
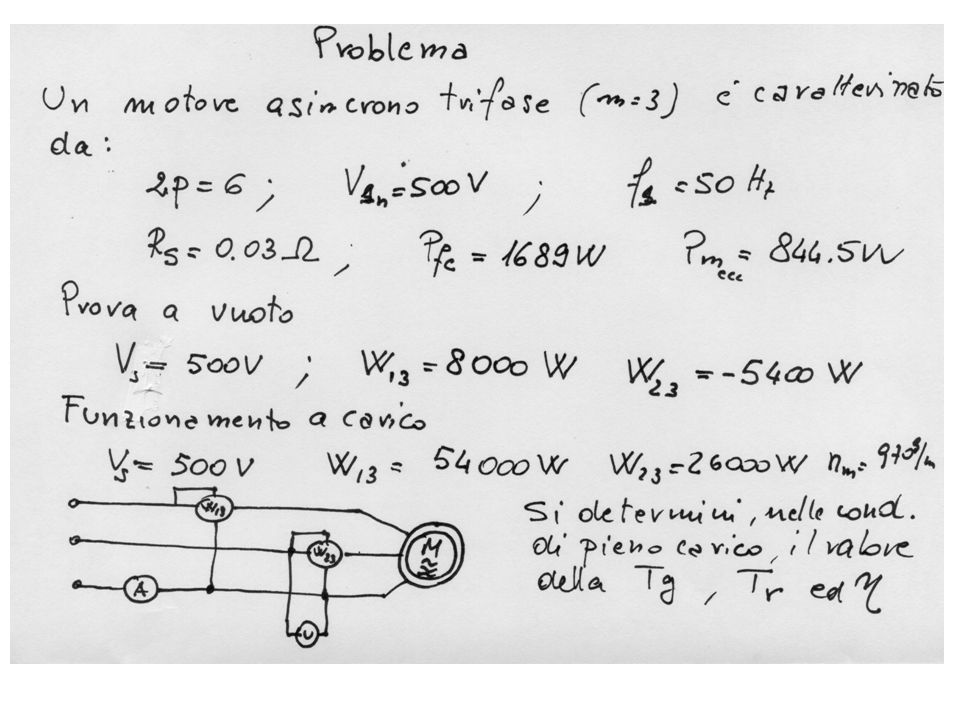


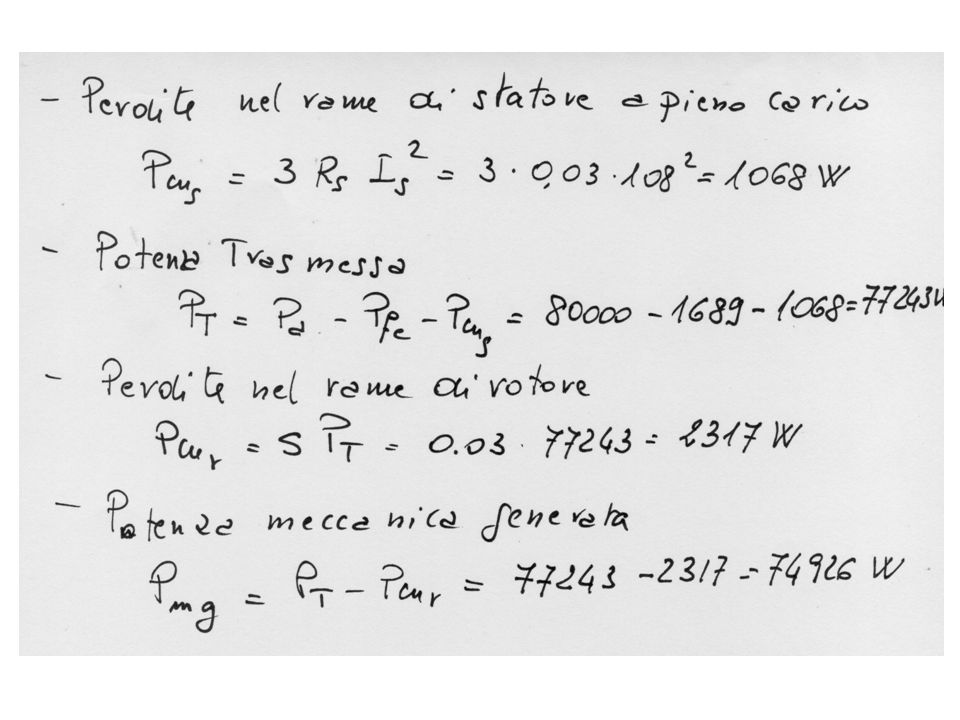

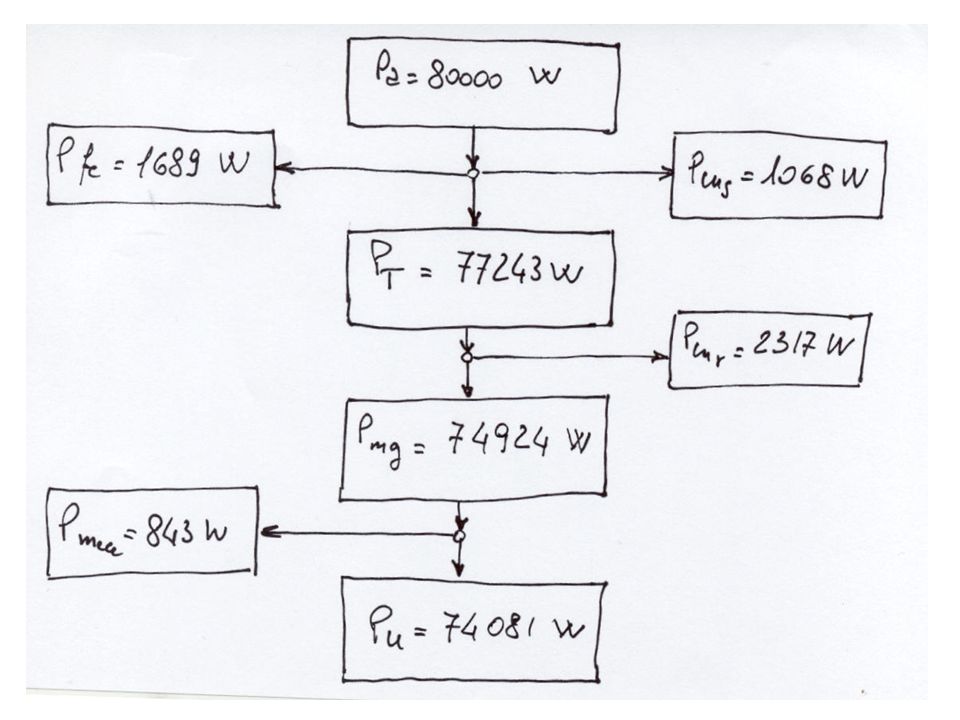















 Generalità di Tipo Costruttivo>")



>")