Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Robotica e Sensor Fusion per i Sistemi Meccatronici
Prof. Mariolino De Cecco, Ing. Luca Baglivo, Ing. Mattia Tavernini Department of Structural Mechanical Engineering, University of Trento

2
Cosa è un Robot? Definizione di robot

3
Nel 1921 il termine ROBOT è stato introdotto dal commediografo ceco Karel Čapek che scrisse il dramma “I Robot Universali di Rossum (R.U.R.)” coniando il termine robot dallo slavo ROBOTA che significa lavoro esecutivo (l’automa nella finzione finisce per ribellarsi all’uomo) Negli anni 1940 lo scrittore russo Isaac Asimov nei suoi libri concepì i robot come automi dalle sembianze umane ma privi di sentimenti. Il loro cervello veniva programmato dall’uomo secondo precise leggi di condotta etica: 1. Un robot non può far male ad un essere umano né consentire, restando inoperoso, che un essere umano si trovi in pericolo 2. Un robot deve obbedire agli ordini impartiti da esseri umani, a meno che tali ordini non entrino in conflitto con la prima legge 3. un robot deve proteggere la sua esistenza a meno che tale protezione non vada in conflitto con la prima o la seconda legge Definizione di robot

4
La letteratura fantascientifica ha condizionato l’immaginario delle persone non appartenenti al mondo dell’ingegneria le quali immaginano i robot come androidi che parlano e camminano (alcuni industriali ancora preferiscono robot antropomorfi rispetto a quelli cartesiani anche se meno adatti all’applicazione) Attualmente non c’è una definizione comunemente accettata. Tipicamente si considera robot qualsiasi macchina che, indipendentemente dal suo aspetto esteriore, è capace di essere riprogrammata per eseguire una serie di compiti in cui ci sia una interazione con l’ambiente nel quale opera Un robot viene da molti definito come quel sistema in grado si operare una connessione intelligente tra percezione ed azione Dal punto di vista funzionale si può definire robot quella macchina automatica/autonoma la cui applicazioni differiscono di genere da quelle pensate dal progettista della macchina stessa Definizione di robot

5
PERCEZIONE PIANIFICAZIONE AZIONE
Il robot è dunque un sistema in grado di eseguire: PERCEZIONE PIANIFICAZIONE AZIONE Definizione di robot

6
MECCANICA ELETTRONICA INFORMATICA
I campi dell’ingegneria che sono coinvolti: MECCANICA ELETTRONICA INFORMATICA Definizione di robotica

7
Il Robot da un punto di vista sistemistico

8
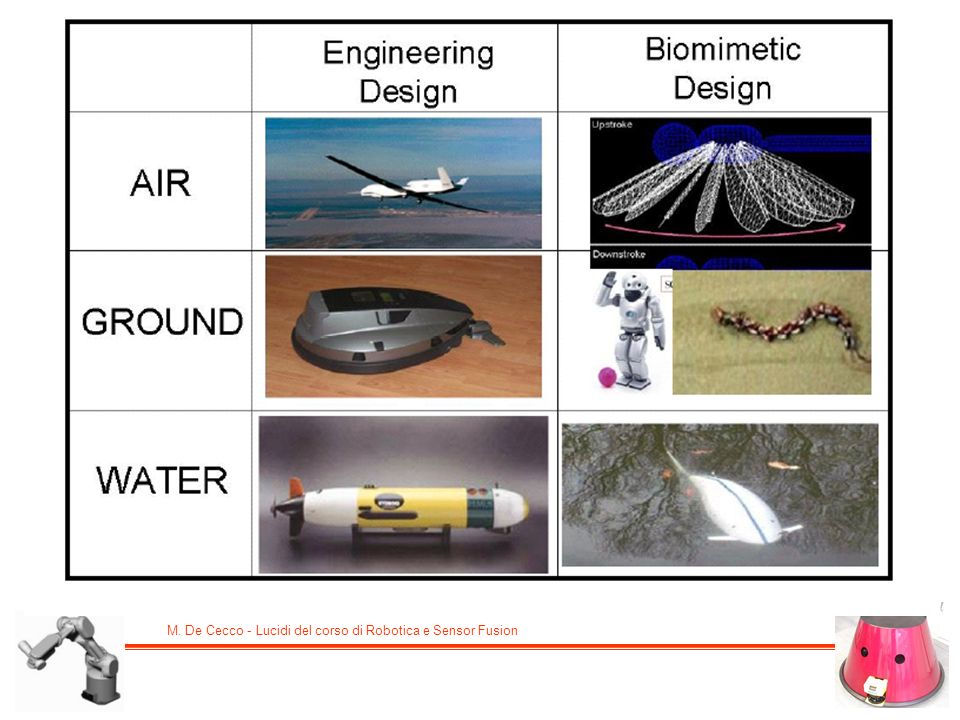
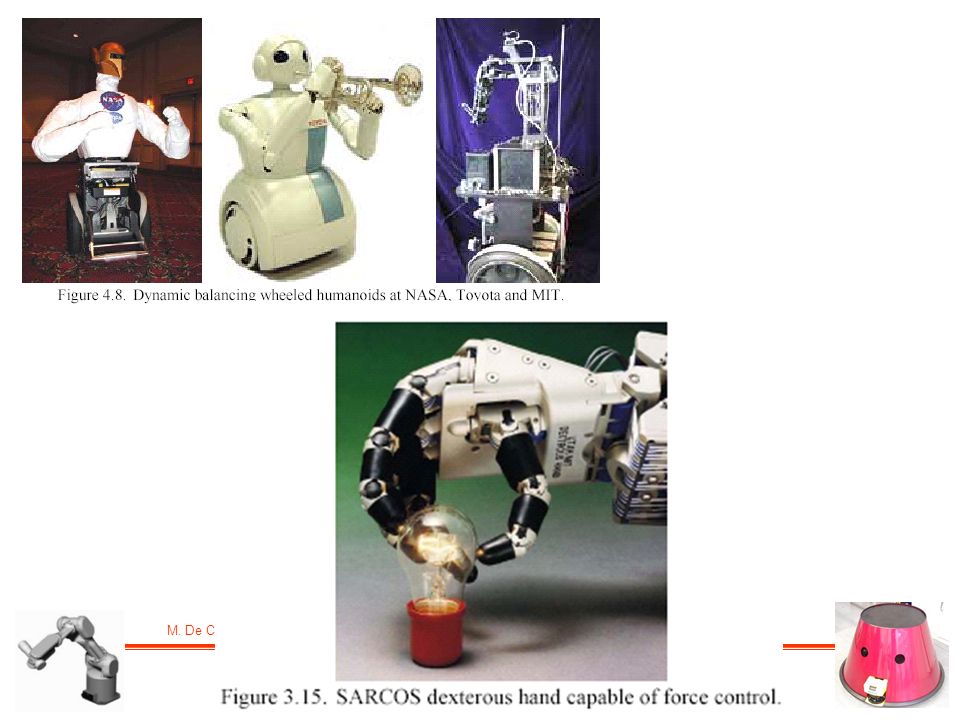
Manipolatori MAN Veicoli mobili AGV Aeorobot UAV Robot free-flying RFF Umanoidi Robot ispirati al mondo animale … Categorie di Robot

9
SENSOR FUSION Il Robot da un punto di vista sistemistico
Ambiente strutturato Ambiente NON strutturato Molti sensori (anche ridondanti) Pochi sensori SENSOR FUSION Il Robot da un punto di vista sistemistico
 Pochi sensori. SENSOR. FUSION. Il Robot da un punto di vista sistemistico.")
10
VEICOLI MANIPOLATORI MOBILI RICOSTRUZIONE SENSOR AMBIENTE FUSION
LASER + VISIONE SENSOR FUSION Introduzione – ARGOMENTI TRATTATI NEL CORSO

11
? P2 P1 Cosa significa SENSOR FUSION
Prendiamo a riferimento una applicazione per veicoli autonomi ? P2 P1 Dove sto andando? Dove sono? Il veicolo arriva in una posizione finale stimando mediante odometria di essere in P1 (con relativa incertezza espressa dall’ellisse corrispondente) Un sistema di misura a triangolazione gli comunica che si trova in P2 (con relativa incertezza espressa dall’ellisse corrispondente) DOVE IL ROBOT STIMA DI ESSERE? Cosa significa SENSOR FUSION
 Un sistema di misura a triangolazione gli comunica che si trova in P2 (con relativa incertezza espressa dall’ellisse corrispondente) DOVE IL ROBOT STIMA DI ESSERE Cosa significa SENSOR FUSION.")
12
Sistemi Olonomi e non olonomi
Nei manipolatori un estremo è vincolato rigidamente ad una base, all’altro estremo è fissato un organo terminale (end effector). Conoscendo la variabile connessa con ogni giunto (variabile di giunto: angolo per i rotoidali, posizione relativa per i prismatici) la posizione ed orientazione (posa o postura) dell’organo terminale sono univocamente determinati Nel caso dei robot mobili non si hanno vincoli rigidi che ne vincolano la posizione in maniera univoca, bensì ruote (generalmente) che determinano un vincolo di velocità Conoscendo la variabile connessa con ogni giunto (angolo complessivo di rotazione della ruota) non si ha nessuna informazione circa la posa del veicolo Sistemi Olonomi e non olonomi
. Conoscendo la variabile connessa con ogni giunto (variabile di giunto: angolo per i rotoidali, posizione relativa per i prismatici) la posizione ed orientazione (posa o postura) dell’organo terminale sono univocamente determinati. Nel caso dei robot mobili non si hanno vincoli rigidi che ne vincolano la posizione in maniera univoca, bensì ruote (generalmente) che determinano un vincolo di velocità. Conoscendo la variabile connessa con ogni giunto (angolo complessivo di rotazione della ruota) non si ha nessuna informazione circa la posa del veicolo. Sistemi Olonomi e non olonomi.")
13
Applicazioni – Robot in campo Farmaceutico
Allo scopo di testare milioni di reagenti per determinare le miscele più adatte alla definizione di nuovi farmaci è necessario l’intervento di macchine automatiche riprogrammabili. Mediante operazioni effettuate da utenti umani è possibile verificare circa 30 miscele al giorno Mediante l’intervento dei robot il numero sale a in un giorno Altri vantaggi sono: si evitano operazioni ripetitive e quindi alienanti per una persona si evita la manipolazione di reagenti pericolosi (ad esempio radioattivi, corrosivi, etc) si possono controllare in maniera automatica le condizioni ambientali (ad esempio la temperatura) Svantaggio: tutto il sistema deve essere strutturato in maniera molto più rigida rispetto al caso umano (sistemi di immagazzinamento materie prime e composti, manipolazione ed inserzione). Dunque l’azienda deve sostenere un maggiore costo iniziale a fronte di un vantaggio a medio-lungo periodo Applicazioni – Robot in campo Farmaceutico
 si possono controllare in maniera automatica le condizioni ambientali (ad esempio la temperatura) Svantaggio: tutto il sistema deve essere strutturato in maniera molto più rigida rispetto al caso umano (sistemi di immagazzinamento materie prime e composti, manipolazione ed inserzione). Dunque l’azienda deve sostenere un maggiore costo iniziale a fronte di un vantaggio a medio-lungo periodo. Applicazioni – Robot in campo Farmaceutico.")
14
Applicazioni – Robot per trasporto merci

15
Veicoli robotici da campo
I veicoli robotici sono sviluppati sia per applicazioni militari che spaziali e civili per uso in terreni primitivi, cioè senza strade di alcun tipo. L’esperienza sviluppata per i veicoli autonomi “fuori-strada” è utilizzata in altri settori come l’agricoltura, l’attività mineraria, le costruzioni, e gli interventi in ambienti pericolosi

17
Correre e Saltare Nell’evoluzione della robotica c’è una lunga tradizione di fare ricorso a imitazioni di sistemi biologici. I laboratori di ricerca giapponesi sono stati e sono molto interessati alla “bio-mimetica”, ottenendo importanti successi.

19
Un robot circolare soffice capace di strisciare e saltare

Presentazioni simili

, 10 Dicembre 2003 ALTAIR -- Dipartimento di Informatica – Università di Verona>")





 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")




 gli ordini impartiti ad un collaboratore provengono dal suo diretto superiore (unità di comando)>")




 M.T. PAZIENZA a.a. 2009-2010.>")
 Prof. M.T. PAZIENZA a.a. 2005-2006.>")
 A.A. 99/00 B. Modulo di Robotica>")