Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Prof. Gino Dini – Università di Pisa

2
Principali scopi dei sensori nella robotica industriale: fornire un segnale di ritorno al controllo fornire un segnale di ritorno al controllo monitorare lo stato del sistema o dallambiente esterno monitorare lo stato del sistema o dallambiente esterno segnalare situazioni impreviste segnalare situazioni impreviste operare in ambienti non strutturati operare in ambienti non strutturati riconoscere un oggettoriconoscere un oggetto determinare la posizione e lorientamento di un oggettodeterminare la posizione e lorientamento di un oggetto

3
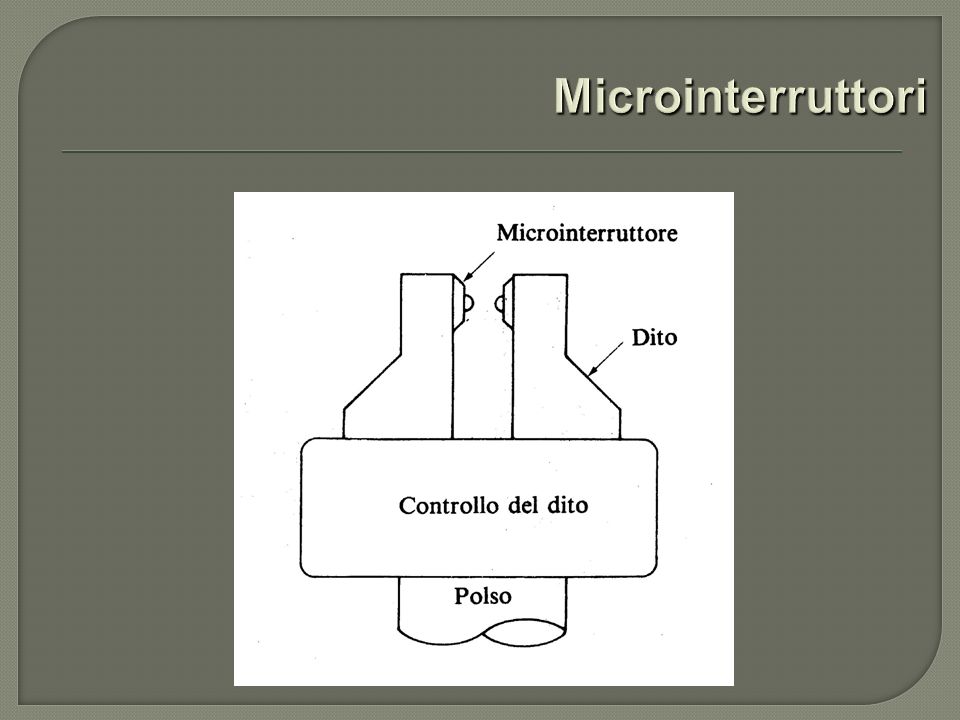
Sensori di contatto Sensori di contatto Sensori di forza Sensori di forza Sensori di prossimità Sensori di prossimità Sensori di distanza Sensori di distanza Sistemi di visione Sistemi di visione

6
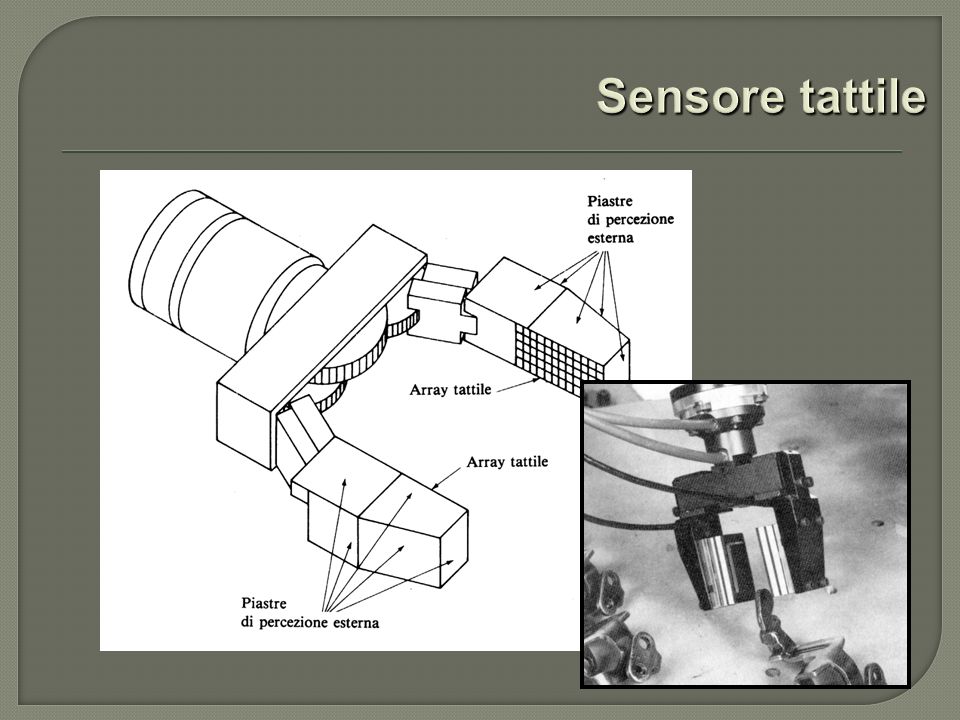
Elementi della matrice tattile: 80 x 80 Spaziatura tra gli elementi: 2 mm Massima pressione di esercizio: 0,04 kg/mm 2 Risoluzione: 8 bit (0,04/255 kg/mm 2 ) Tempo di scansione (singolo elemento): 8 s Tempo di scansione (intera matrice): 45 ms Comunicazione: via porta parallela
 Tempo di scansione (singolo elemento): 8 s Tempo di scansione (intera matrice): 45 ms Comunicazione: via porta parallela")
9
Sensori di contatto Sensori di contatto Sensori di forza Sensori di forza Sensori di prossimità Sensori di prossimità Sensori di distanza Sensori di distanza Sistemi di visione Sistemi di visione

11
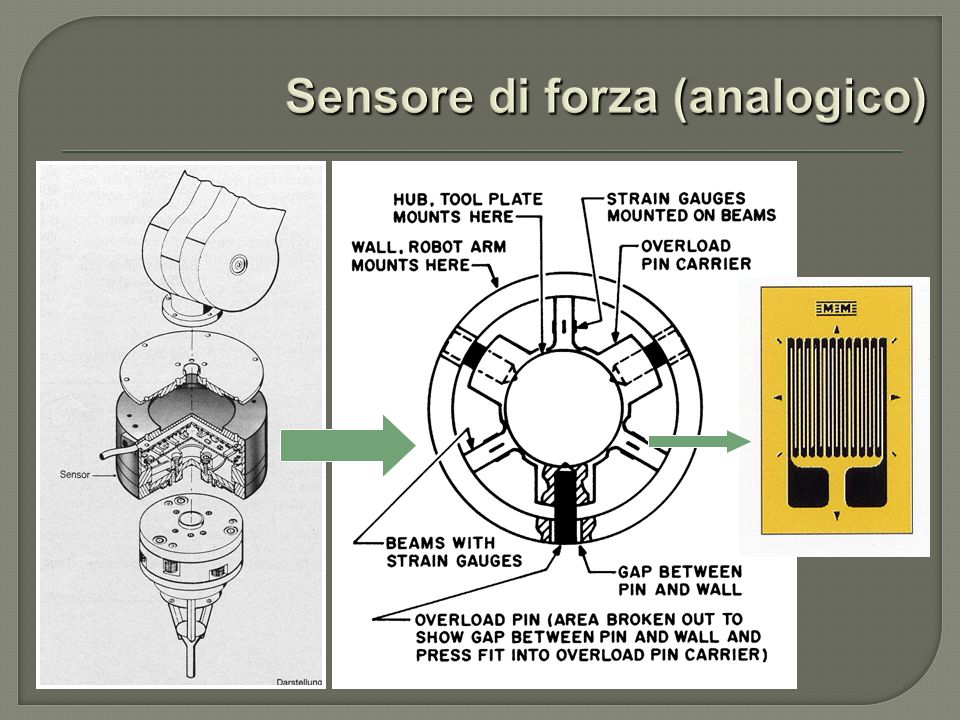
Sensore di forza Polso del robot Gripper

13
Campo di lavoro: Fx, Fy ± 330 N Fz ± 660 N Tx, Ty, Tz ± 30 Nm Risoluzione: Fx, Fy, Fz 0,25 N Tx, Ty, Tz 0,015 Nm Dimensioni: 92 x 29 mm Peso: 0,81 kg Carichi massimi amissibili: Fx, Fy 4000 N Fz 13000 N Tx, Ty, Tz 340 Nm

14
z z Detection of missing parts by force sensor Z-axis force dF z /dt oil ring top compression ring bottom compression ring

15
Sensori di contatto Sensori di contatto Sensori di forza Sensori di forza Sensori di prossimità Sensori di prossimità Sensori di distanza Sensori di distanza Sistemi di visione Sistemi di visione

21
Sensori di contatto Sensori di contatto Sensori di forza Sensori di forza Sensori di prossimità Sensori di prossimità Sensori di distanza Sensori di distanza Sistemi di visione Sistemi di visione

24
Pezzo da controllare Sorgente laser Sensore ottico Amplificatore Unità di governo

25
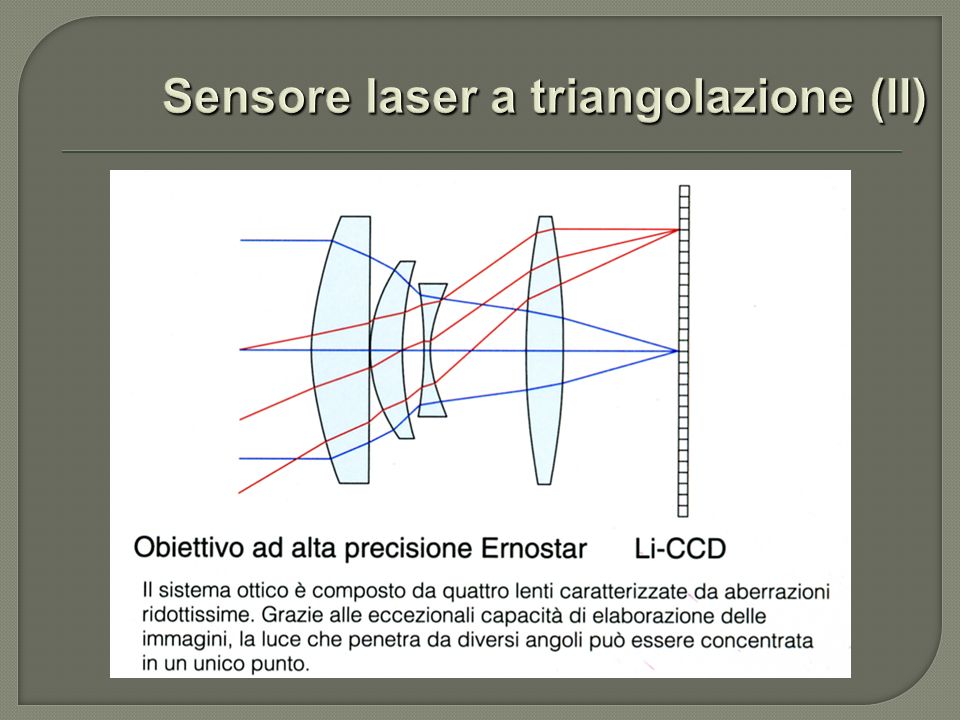
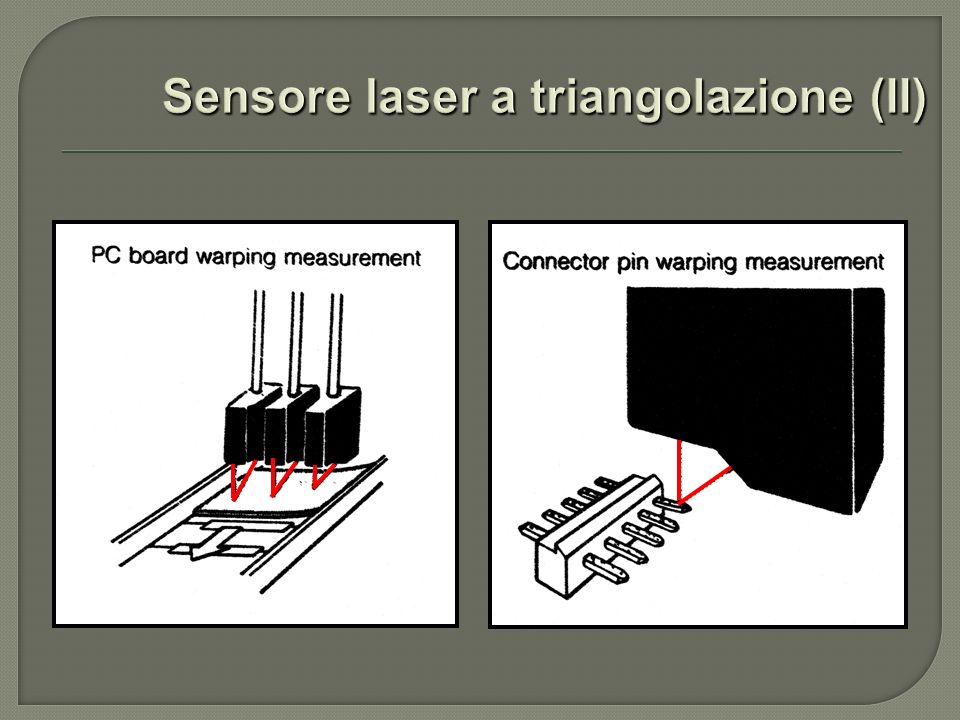
Sensore laser a triangolazione (II)
")
31
Sensori di contatto Sensori di contatto Sensori di forza Sensori di forza Sensori di prossimità Sensori di prossimità Sensori di distanza Sensori di distanza Sistemi di visione Sistemi di visione

32
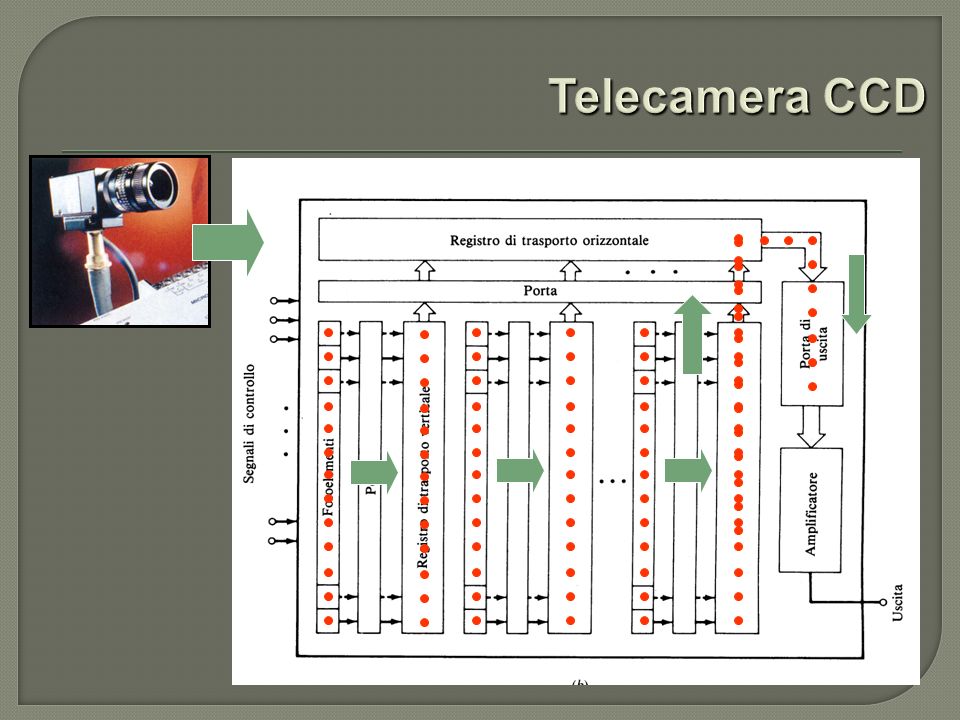
Acquisizione immagine Memoria di quadro Elaborazione immagine Analisi immagine Telecamera Pezzo Sistema di illuminazione Gripper UG robot

34
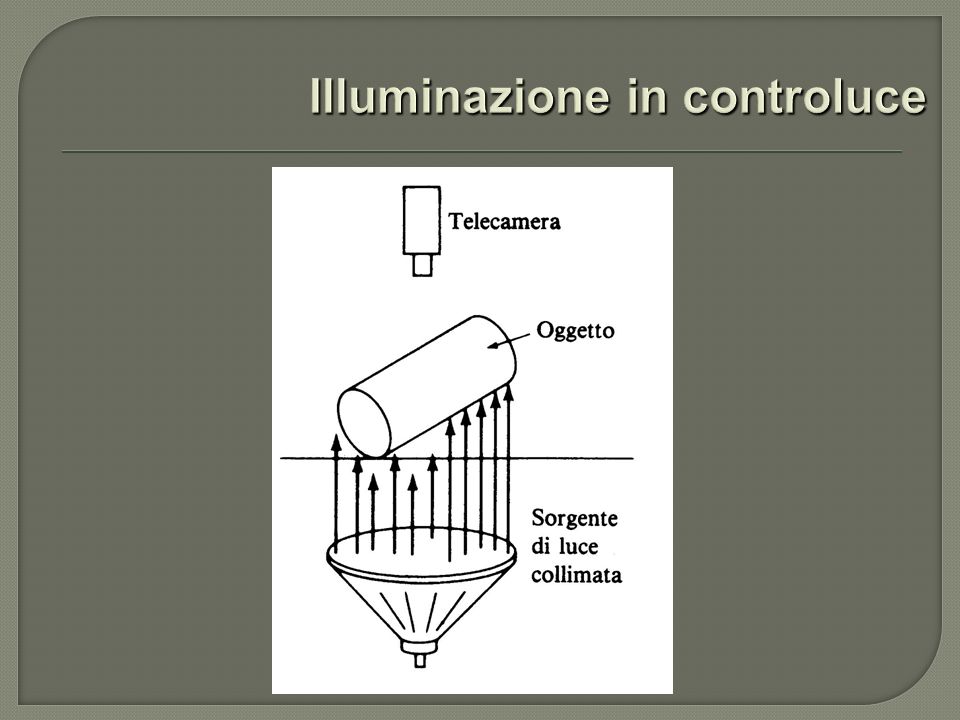
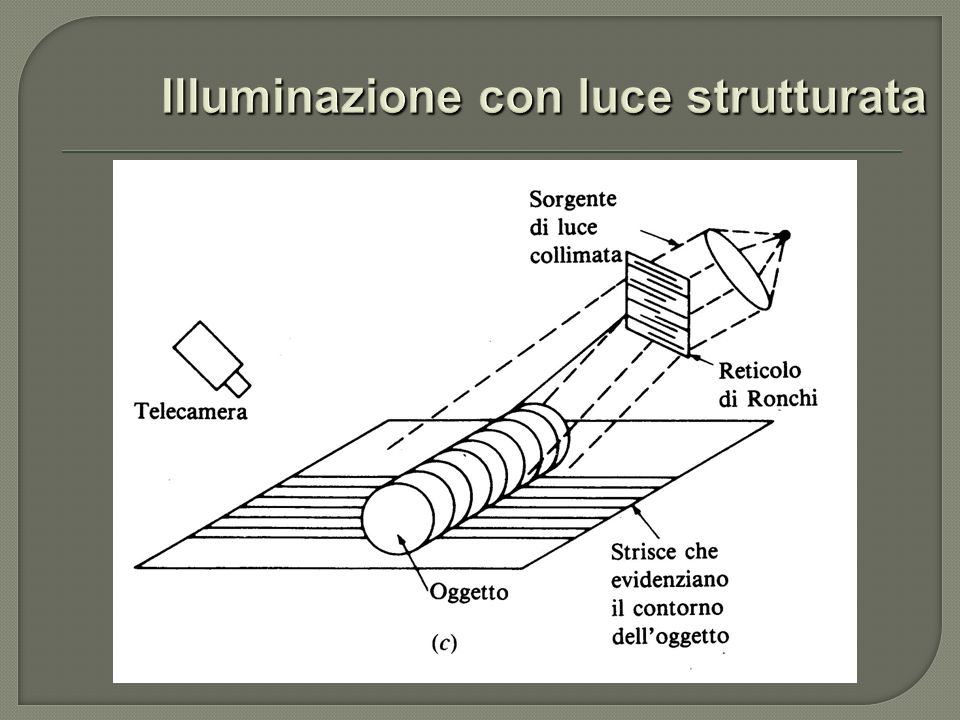
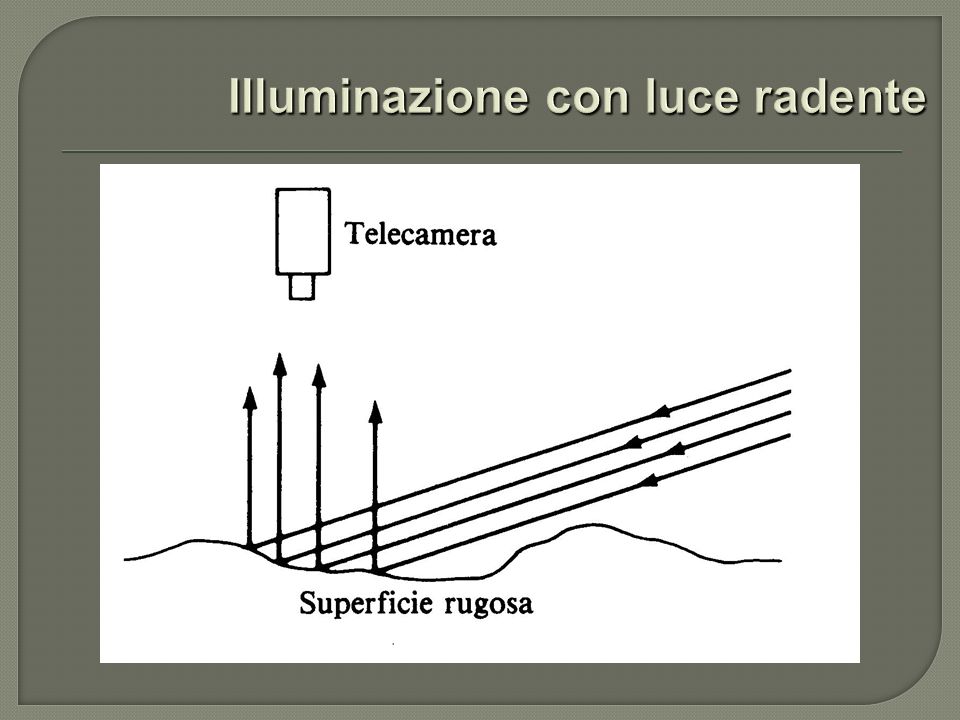
con luce diffusa con luce diffusa con luce diretta con luce diretta in controluce in controluce con luce strutturata con luce strutturata con luce radente con luce radente

36
4-sector optical fiber Toroidal mirror Parabolic mirror Camera lens Part Z movement

41
220 1226365188 220 22411189 220 1032851098 220 199101431502035556190 220 5553220

44
1226365188220 22411189220 1032851098220 199101431502035556190220 5553220 w1w1 w2w2 w3w3 w4w4 w5w5 w6w6 w7w7 w8w8 w9w9 w1w1 w2w2 w3w3 w4w4 w5w5 w6w6 w7w7 w8w8 w9w9

46
Area Perimetro Diametro Centro di gravità Snellezza Numero di fori Livello di grigio (massimo, medio o minimo) Minimo rettangolo circoscritto
 Minimo rettangolo circoscritto")
Presentazioni simili