Scaricare la presentazione
1
ROBOT PUMA 560 Caratteristiche Robot Puma 560 prodotto da RP Automation, Inc. Indirizzo web

2
Generale Area di Lavoro Specifiche Tecniche Assi 6 Attuatori Motori CC
Controllo Numerico Coordinate Encoder Incrementali Controllo di Posizione Cartesiane Cavi 5 metri Area di Lavoro Massima estenzione polso 878 mm (tra il giunto 1 e 5) Limiti giunto 1 320 gradi Limiti giunto 2 250 gradi Limiti giunto 3 270 gradi Limiti giunto 4 280 gradi Limiti giunto 5 200 gradi Limiti giunto 6 532 gradi
 Limiti giunto gradi. Limiti giunto gradi. Limiti giunto gradi. Limiti giunto gradi. Limiti giunto gradi. Limiti giunto gradi.")
3
Capacità di carico Prestazioni Ambiente Pesi Carico pagante nominale
4 kg Carico permesso al polso 4 kg entro 127 mm dal Jt 5 e 37.6 mm dal Jt 6 Prestazioni Errore casuale ± 0.1 mm entro 760 mm Massima velocità 1 rad/s Ambiente Temperatura da 5 a 40 °C Umidità 50% a 40 °C e 90% a 20 °C Pesi Braccio 63 kg Unità di controllo 200 kg

4
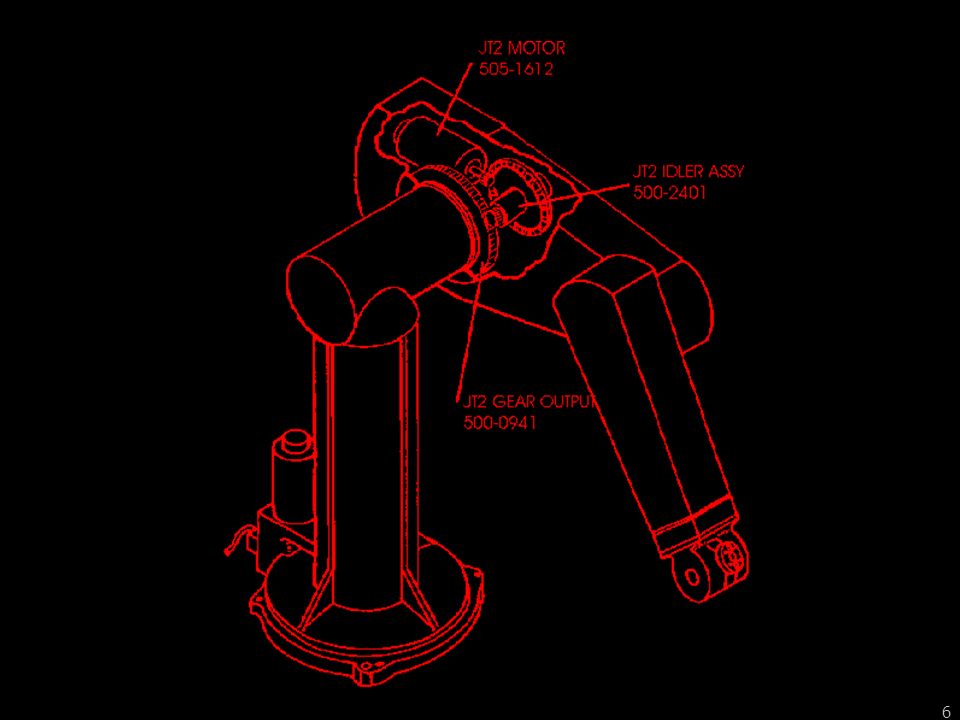
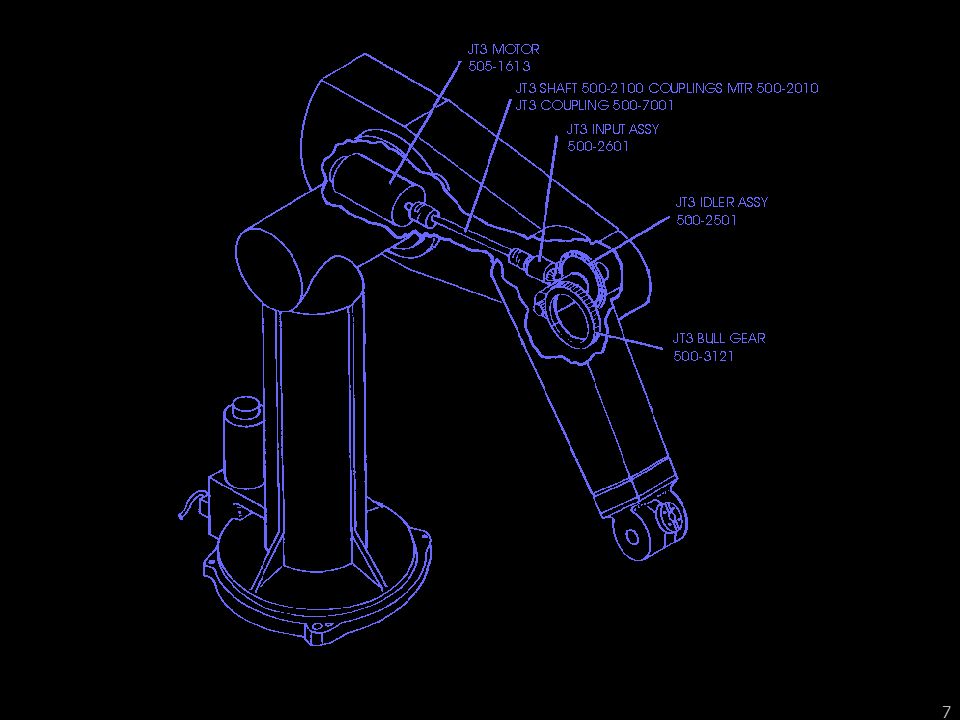
Caratteristiche costruttive

8
Configurazione corrispondente a rotazioni nulle
Quesiti Per gli assi dei giunti Ai indicati, posizionare le terne secondo la convenzione di Denavit-Hartenberg e determinare i parametri. Calcolare in forma simbolica le matrici di posizione M0i e risolvere i problemi di cinematica diretta e inversa 0.67 A2 A3 0.4318 0.0203 0.1254 X0 A1 Z0 Y0 A4 A5 A6 Configurazione corrispondente a rotazioni nulle Y0 Z0 X0

9
Cinematica diretta e inversa
Definire il problema cinematico diretto per la posizione impostando in forma simbolica le matrici di posizione M0h , con h = 1 … 6, a partire dalle matrici di posizione relative Mij di Denavit-Hartenberg; l’impostazione deve rappresentare il primo passo per l’esecuzione del successivo punto 5). Risolvere in forma simbolica il problema cinematico inverso per la posizione. Impostare il problema cinematico diretto per la velocità e l’accelerazione. Utilizzando le matrici dell’asse elicoidale , le matrici di velocità e di accelerazione Partendo dalla formulazione del punto precedente impostare il problema cinematico inverso per la velocità e l’accelerazione evidenziando lo jacobiano che consente la soluzione. Programmare in linguaggio MATLAB, utilizzando i modelli di file forniti, le espressioni simboliche trovate. Verificare con i file Puma560.m, Verifica_Pos_Inv.m e Verifica_Cin_Inv.p la validità delle espressioni trovate e programmate. Commentare i risultati
. Risolvere in forma simbolica il problema cinematico inverso per la posizione. Impostare il problema cinematico diretto per la velocità e l’accelerazione. Utilizzando le matrici dell’asse elicoidale , le matrici di velocità e di accelerazione . Partendo dalla formulazione del punto precedente impostare il problema cinematico inverso per la velocità e l’accelerazione evidenziando lo jacobiano che consente la soluzione. Programmare in linguaggio MATLAB, utilizzando i modelli di file forniti, le espressioni simboliche trovate. Verificare con i file Puma560.m, Verifica_Pos_Inv.m e Verifica_Cin_Inv.p la validità delle espressioni trovate e programmate. Commentare i risultati.")
10
Impostazione della pianificazione del movimento
Per il robot in considerazione si imposti il problema per la pianificazione del movimento, con assegnate velocità, accelerazione e decelerazione massime, per il movimento punto-punto con le leggi di moto definite da posizione iniziale qi e finale qf e tempo di esecuzione T: con accelerazione costante a tratti e minimizzazione del tempo di esecuzione per la riduzione delle vibrazioni e tempo di esecuzione ottimizzato con le seguenti tre traiettorie traiettoria polinomiale del 5° ordine

11
traiettoria di Cicloidale
traiettoria di Gutman Analizzare e comparare dal punto di vista cinematico le traiettorie

12
Traiettoria punto-punto: applicazione con MATLAB
Impiegando le formulazioni del problema cinematico e della pianificazione del movimento sviluppare il programma Programma Punto_Punto.m per il movimento punto-punto da fermo a fermo, con le tre traiettorie proposte, da una postura corrente a una posa finale, al fine di afferrare un oggetto; il programma deve minimizzare il tempo di azionamento e funzionare con qualsiasi tipo di ingresso nell’ambito delle specifiche di seguito fornite Dati d’ingresso Parametri da fornire come argomenti alla funzione Matlab il vettore riga Q0 contenente la postura corrente nello spazio dei giunti il vettore riga Sf(x,y,z,fi,chi,psi) contenente il punto finale cioè la posa dell’organo terminale in coordinate esterne gli altri argomenti utili per far funzionare la funzione, come specificato il file Giunti_Puma560.m contenente le velocità VMax e le accelerazioni AMax massime per ogni giunto; il file viene fornito
 contenente il punto finale cioè la posa dell’organo terminale in coordinate esterne. gli altri argomenti utili per far funzionare la funzione, come specificato. il file Giunti_Puma560.m contenente le velocità VMax e le accelerazioni AMax massime per ogni giunto; il file viene fornito.")
13
2 Risultati: per i file d’ingresso forniti effettuare grafici della traiettoria con il programma PoVeAcPt.m; le variabili dei giunti e le rispettive derivate devono essere calcolate per via analitica simulazione del movimento con il programma Puma560.m un file chiamato Traiettoria.mat contenente le variabili di giunto QG, QGp e QGpp e TempoEsecuzione impiegate in PoVeAcPt.p Commentare i risultati ottenuti per alcuni casi numerici significativi confrontando le tre traiettorie e le implicazioni di carattere cinematico.











 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")









 A.A. 99/00 B. Modulo di Robotica>")
