Scaricare la presentazione
1
Motore passo-passo Motore brusheless

2
Introduzione Motore in corrente continua senza spazzole
motore brusheless Alimentato da segnali impulsivi La coppia è dovuta alla presenza di un campo magnetico rotante Utilizzati nella misura di posizione e velocità di sistemi a catena aperta

3
Vengono denominati “a passo” o “passo-passo” i motori che possono essere fatti avanzare a singoli passi e bloccati in una posizione qualunque, in modo da consentire facilmente posizionamenti di grande precisione, utili in una vasta serie di applicazioni quali ad esempio i servomeccanismi nell’automazione industriale, nella robotica, nelle stampanti, nei plotter, nei diskdrive, ecc. Per poter essere pilotati, i motori passo-passo richiedono però sequenze di impulsi particolari, che debbono essere generati da opportuni circuiti elettronici.

4
Vantaggi Sono affidabili perché robusti e quindi, non richiedono manutenzione Sono precisi Possono essere pilotati da forme d’onda impulsive e ciò rende molto semplice l’interfaccia con sistemi digitali Lavorano anche a basse velocità non necessitano quindi di riduttori di velocità Generano coppie di tenuta anche da fermi Permettono il controllo della velocità senza retroazione

5
Svantaggi La potenza è modesta rispetto alle dimensioni del motore
Non adatti per elevate velocità angolari Presentano problemi di instabilità e di risonanza per elevate velocità Basso rendimento Il moto dell’asse è discreto e non continuo La risposta al gradino è oscillatorio-smorzato Non adatti per carichi elevati

6
Tipi di motori A magnete permanente PM A riluttanza variabile (VR)
Ibridi

7
Motori PM La coppia motrice nasce dall’interazione del campo di statore e del campo magnetico di rotore o di armatura

10
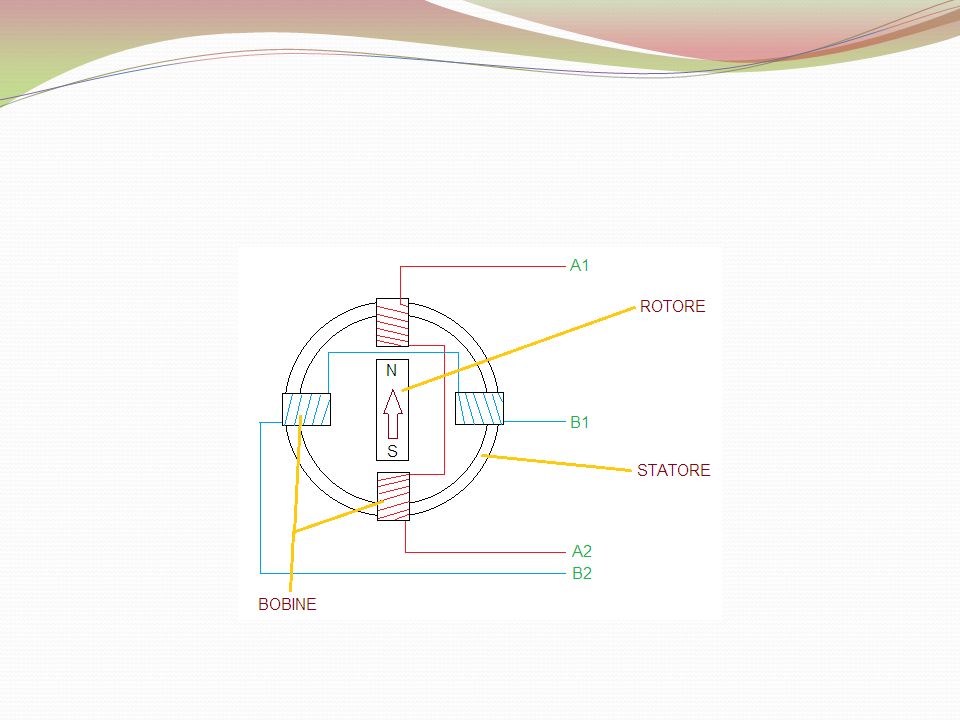
Funzionamento del motore PM
La coppia motrice nasce dall’interazione del campo magnetico di statore con quello di rotore Il campo di statore è generato dalle bobine avvolte sulle estensioni interne Il campo di rotore è generato da un magnete permanente rotante interno alla struttura statorica

11
Pilotaggio a singola fase

12
Pilotaggio a doppia fase

13
Avanzamento a mezzo passo

14
Circuito di pilotaggio

15
Motore pp con arduino

17
void setup() { //i pin sono //configurati come uscite pinMode(2, OUTPUT); pinMode(3, OUTPUT); pinMode(4, OUTPUT); pinMode(5, OUTPUT); //forzo le uscite a livello logico basso digitalWrite(2, LOW); digitalWrite(3, LOW); digitalWrite(4, LOW); digitalWrite(5, LOW); } void loop() //FASE 1 //Alimento solo la prima bobina digitalWrite(2, HIGH); delay(10);
; pinMode(5, OUTPUT); //forzo le uscite a livello logico basso. digitalWrite(2, LOW); digitalWrite(3, LOW); digitalWrite(4, LOW); digitalWrite(5, LOW); } void loop() //FASE 1. //Alimento solo la prima bobina. digitalWrite(2, HIGH); delay(10);")
18
//FASE 2 //Alimento solo la seconda bobina digitalWrite(2, LOW); digitalWrite(3, LOW); digitalWrite(4, HIGH); digitalWrite(5, LOW); delay(10); //FASE 3 //Alimento solo la terza bobina digitalWrite(3, HIGH); digitalWrite(4, LOW); //fase 4 //Alimento solo la quarta bobina digitalWrite(5, HIGH);
; delay(10); //FASE 3. //Alimento solo la terza bobina. digitalWrite(3, HIGH); digitalWrite(4, LOW); //fase 4. //Alimento solo la quarta bobina. digitalWrite(5, HIGH);")
















 I sensori di velocità>")





