Scaricare la presentazione
1
Macchine elettriche rotanti fondamentali
Macchina asincrona (usata di solito come motore) Macchina sincrona (usata di solito come generatore) Macchina a corrente continua
 Macchina sincrona (usata di solito come generatore) Macchina a corrente continua.")
2
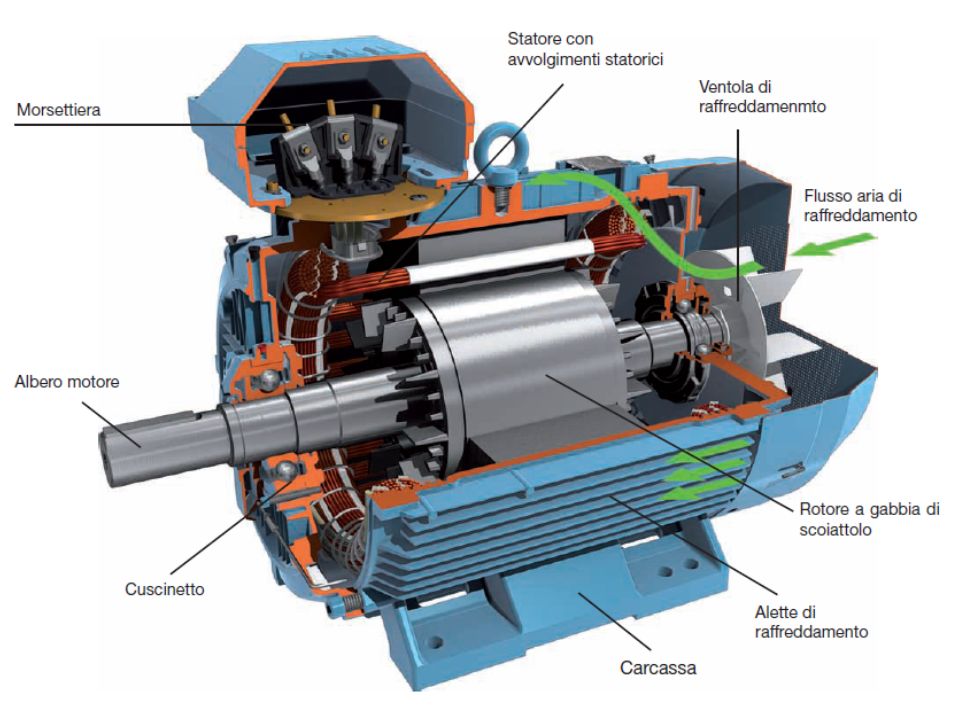
Il Motore Asincrono Trifase
Realizzato da Galileo Ferraris nel 1885 Alimentato direttamente dalla rete di distribuzione, a tensione e frequenza costanti Il motore elettrico più semplice, economico, robusto ed affidabile Elevato rendimento non richiede lubrificazione, né manutenzione non presenta alcuna difficoltà o particolarità per l’avviamento il dispositivo più diffuso nell’utilizzazione dell’energia elettrica come forza motrice

7
Principio di funzionamento: creazione di un campo rotante, realizzabile per mezzo di circuiti fissi nello spazio e percorsi da correnti polifasi, in particolare da correnti trifasi.

8
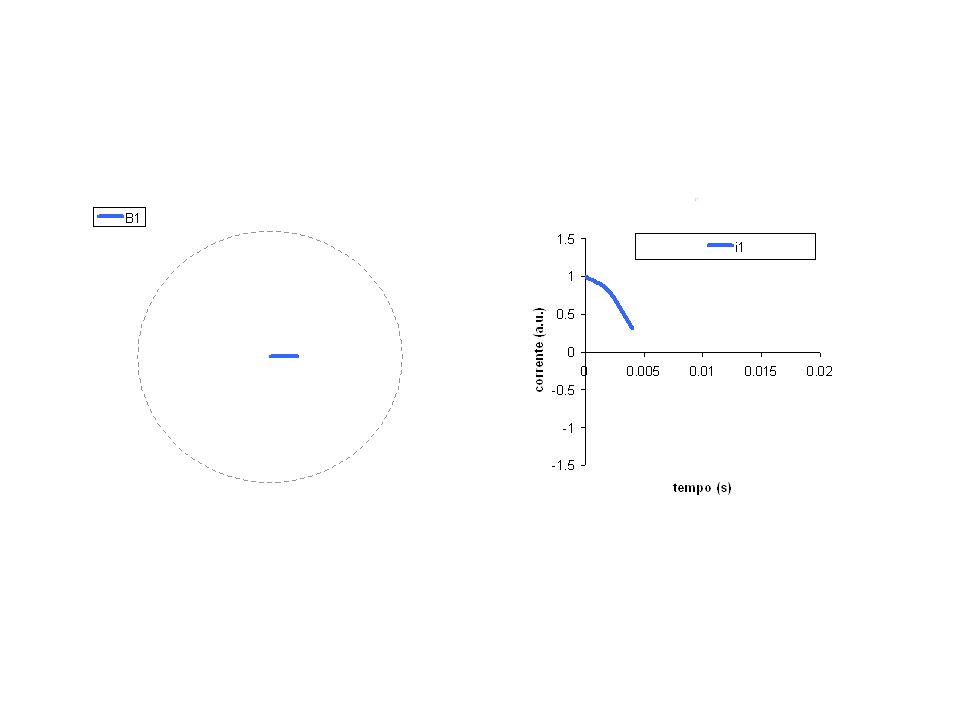
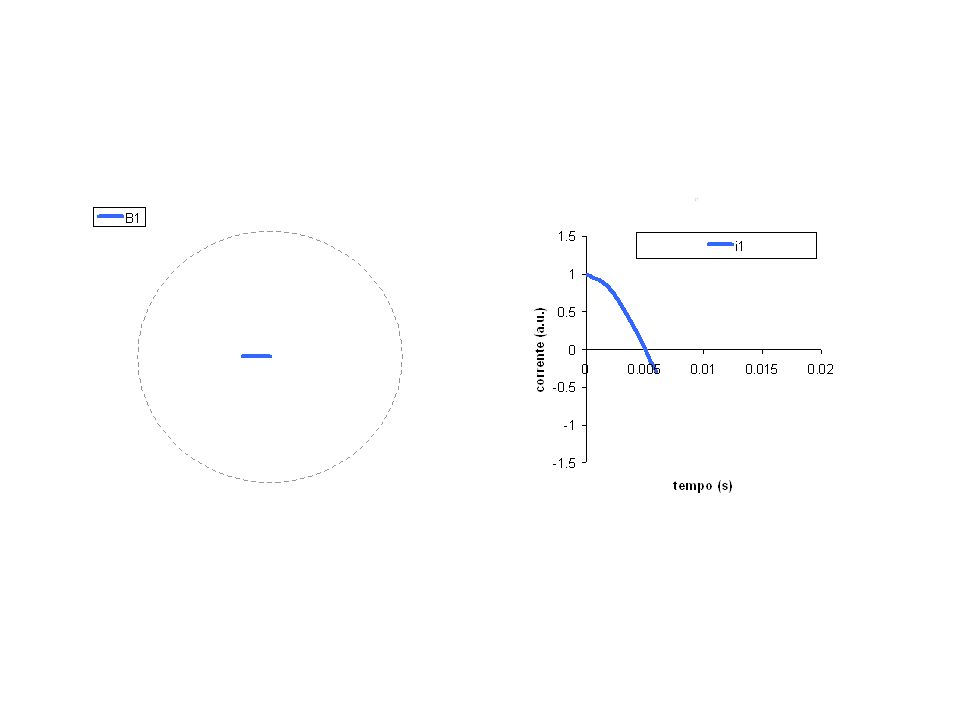
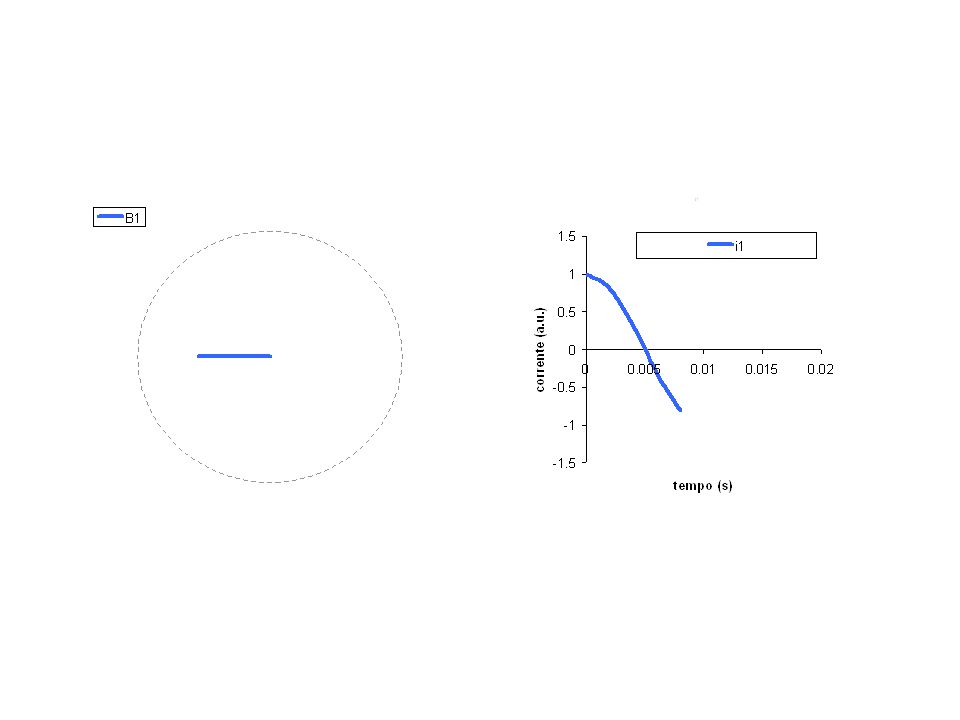
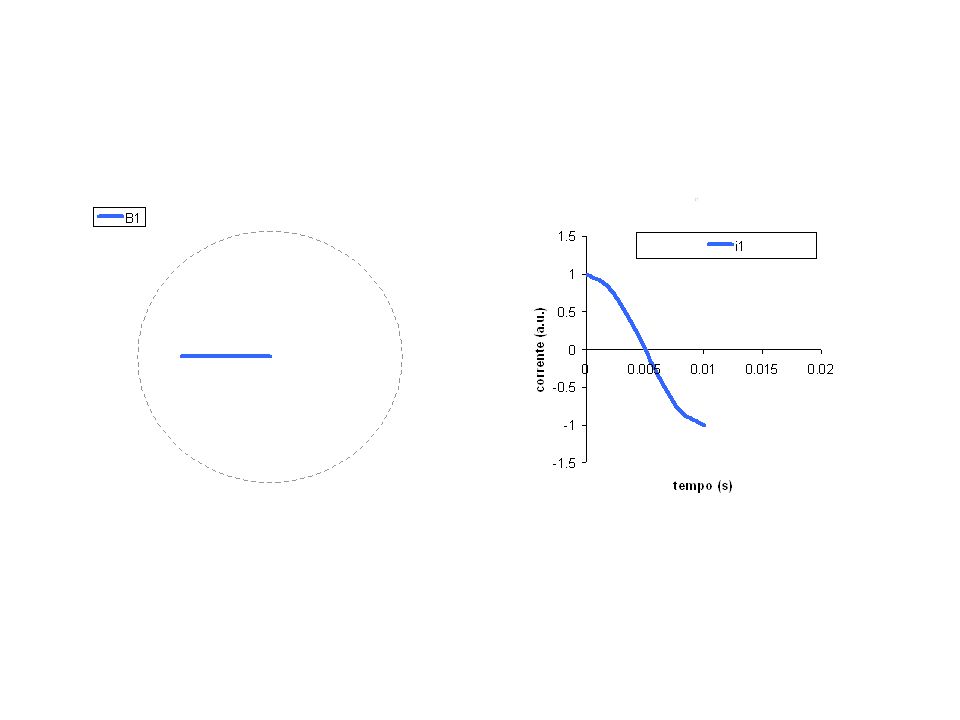
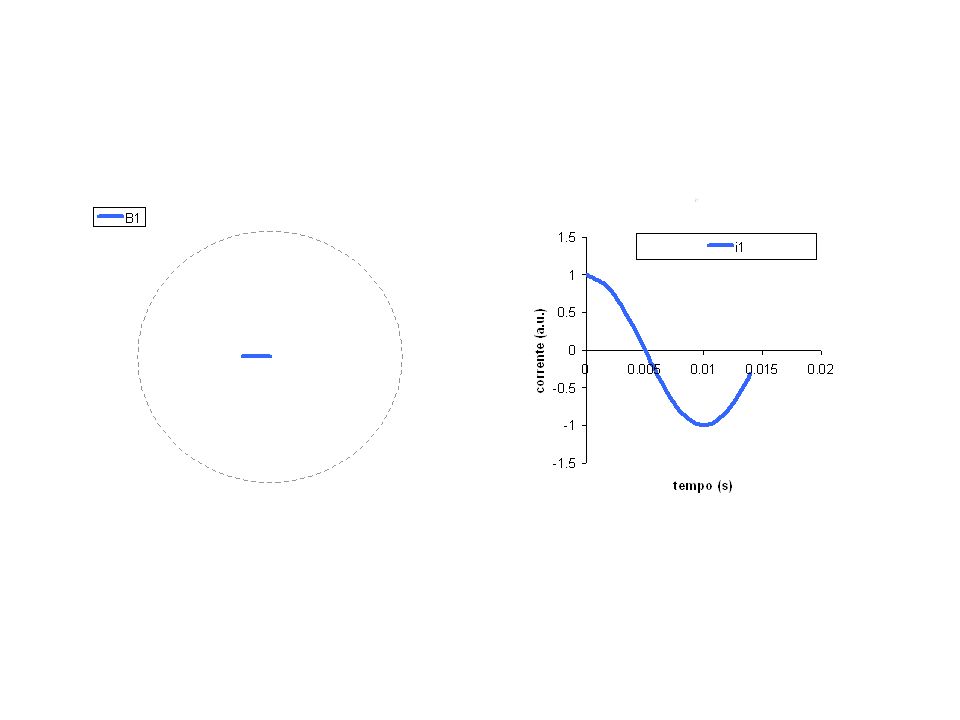
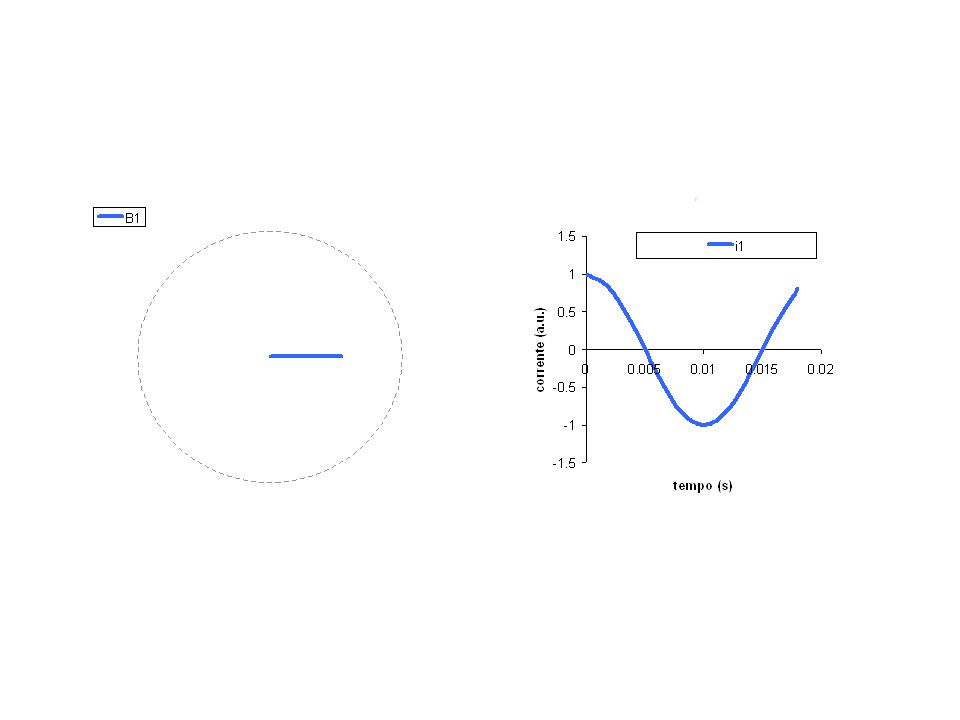
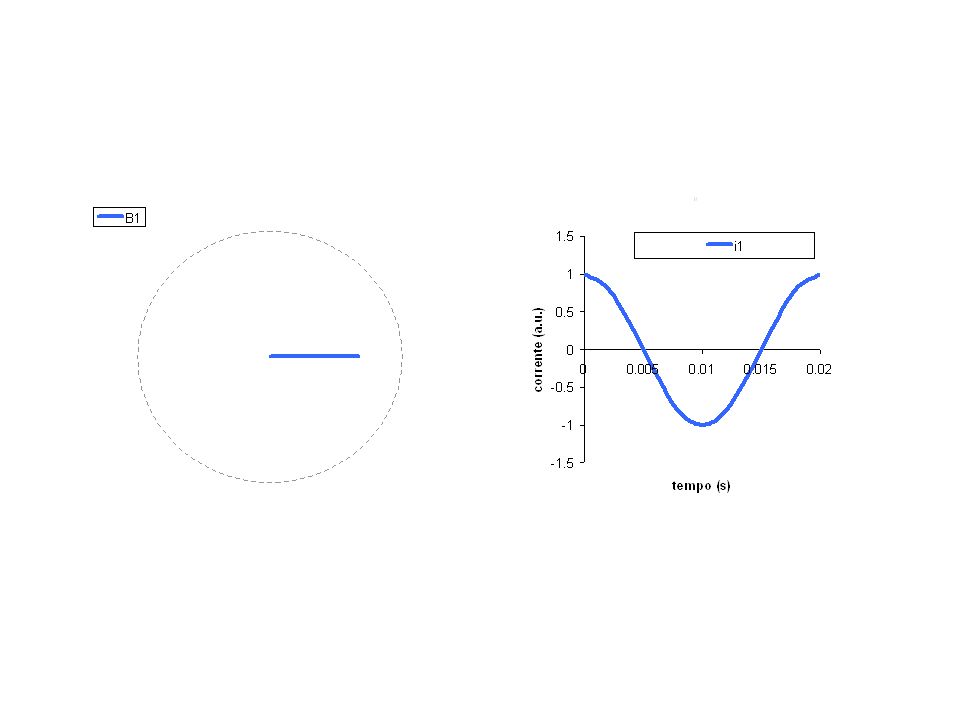
x1 + Una spira percorsa da corrente alternata produce un campo magnetico alternato

19
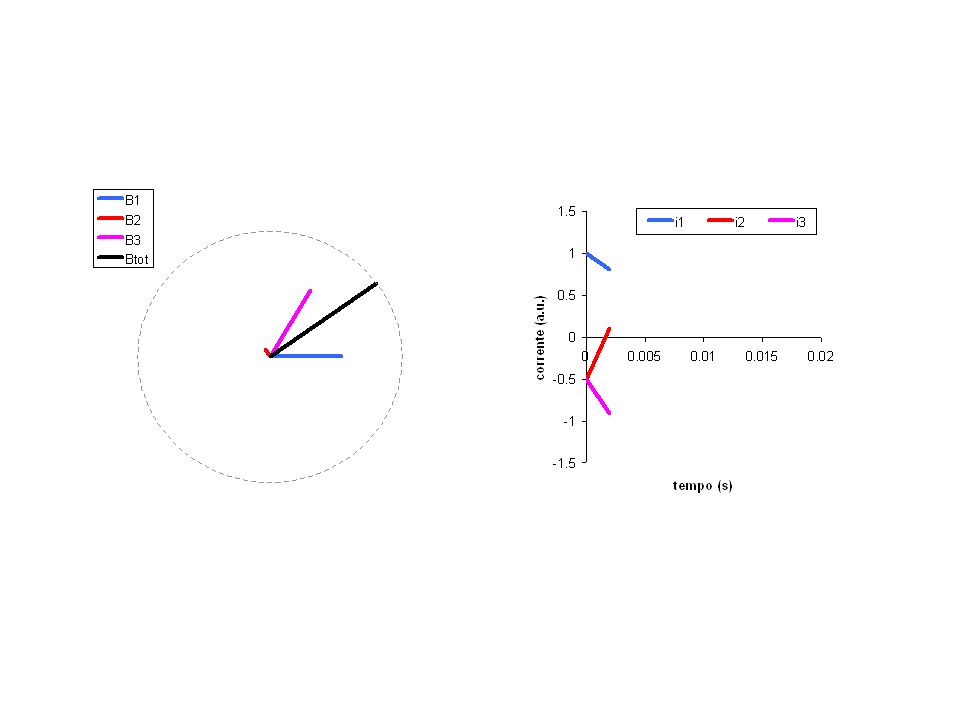
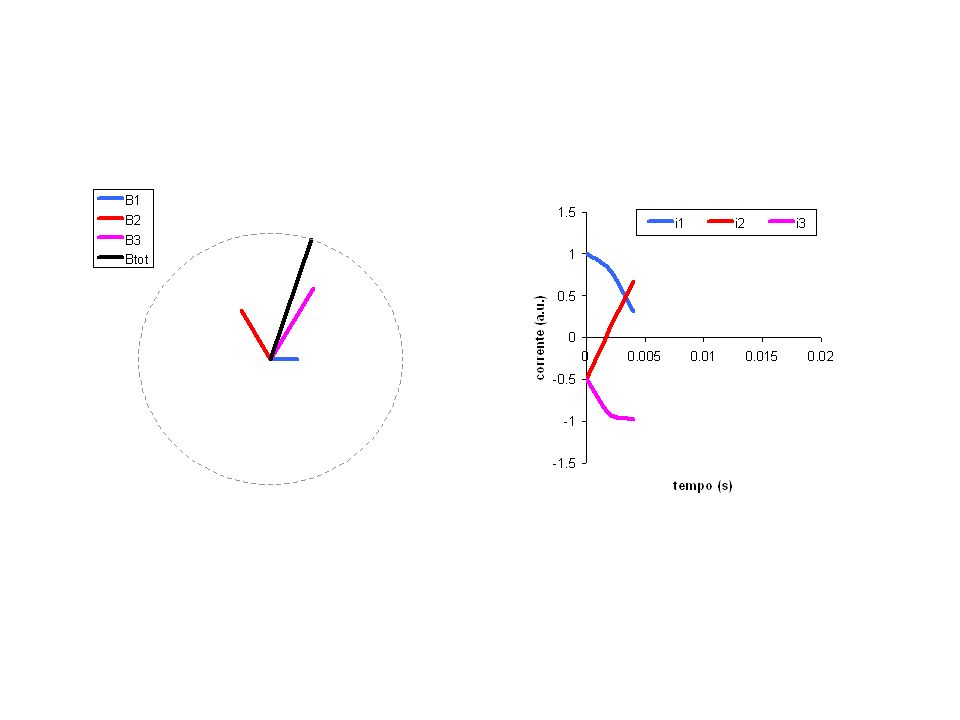
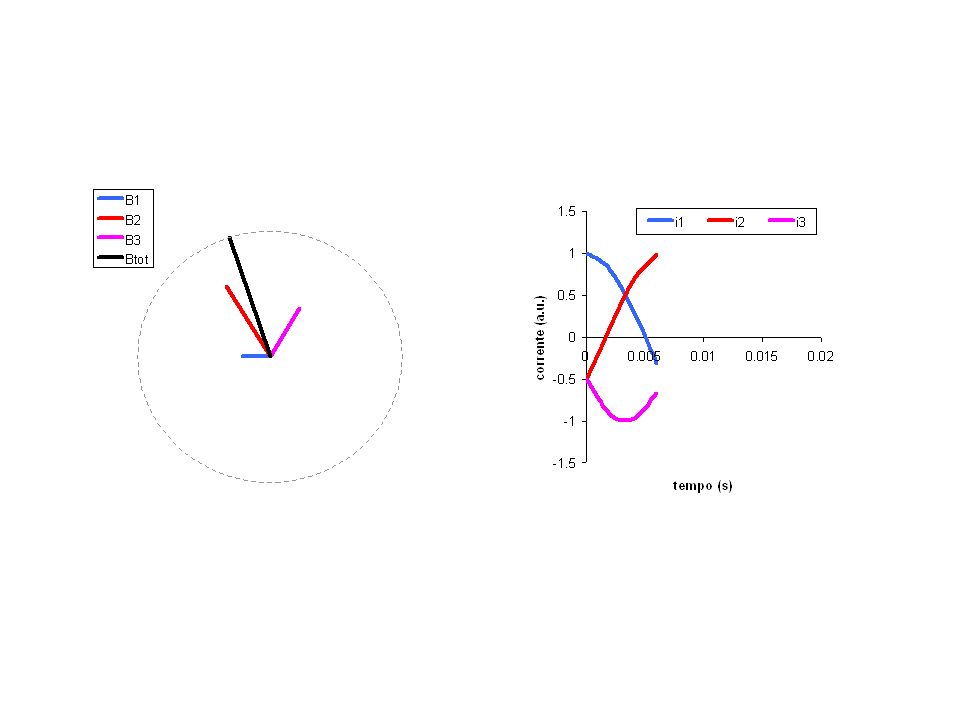
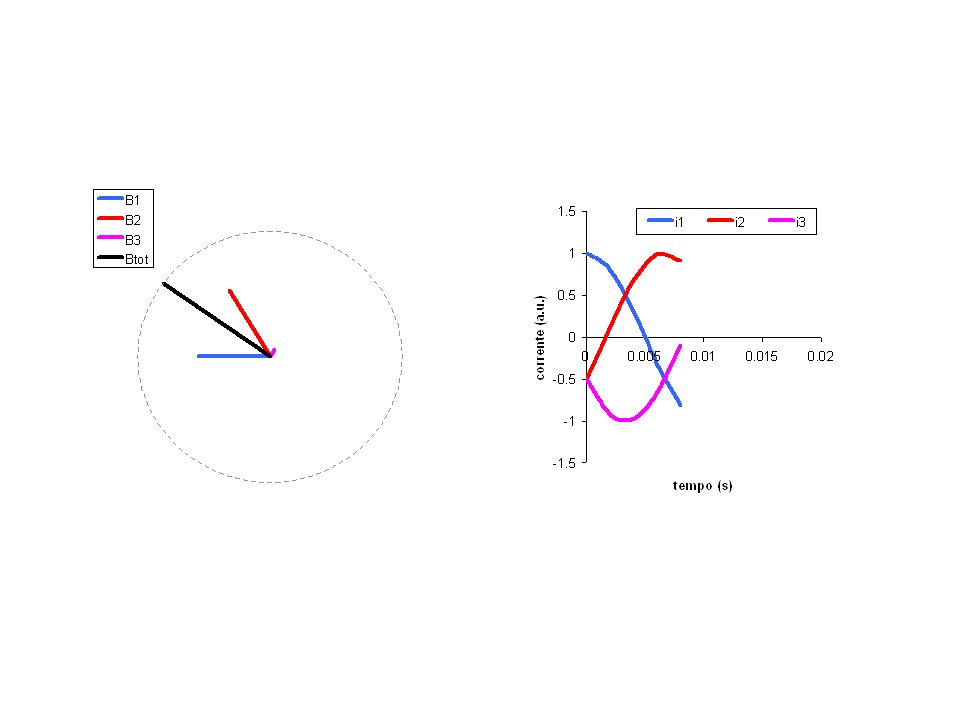
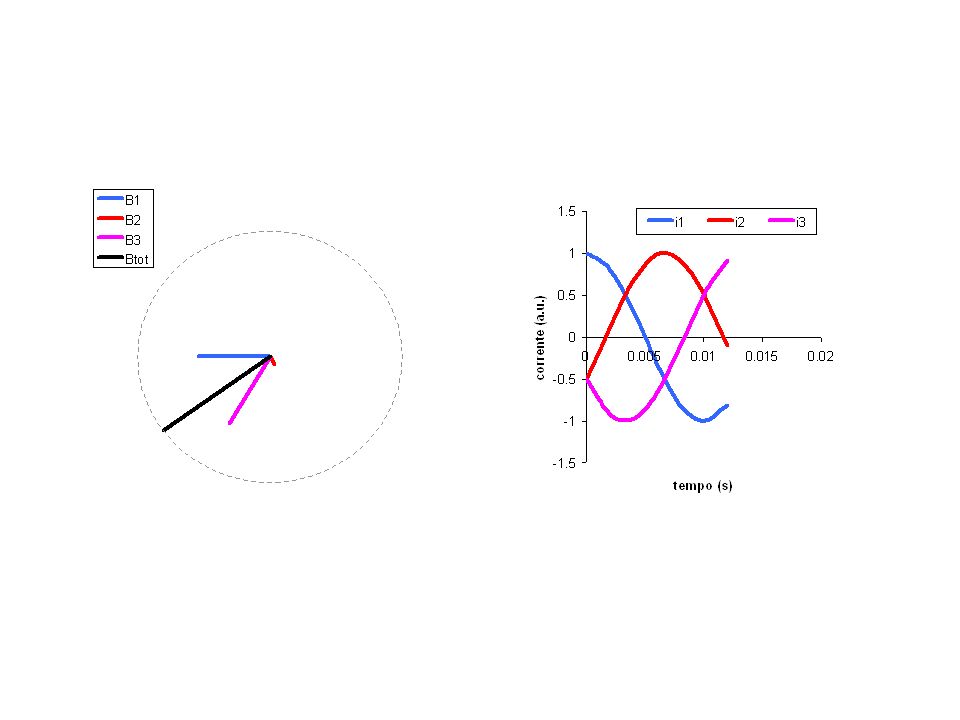
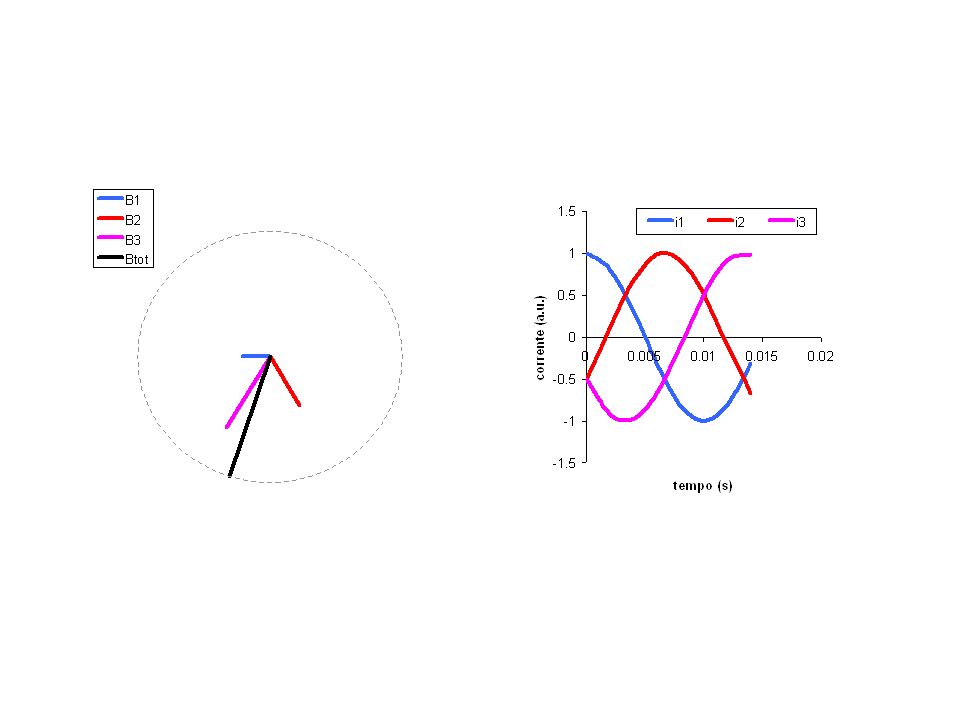
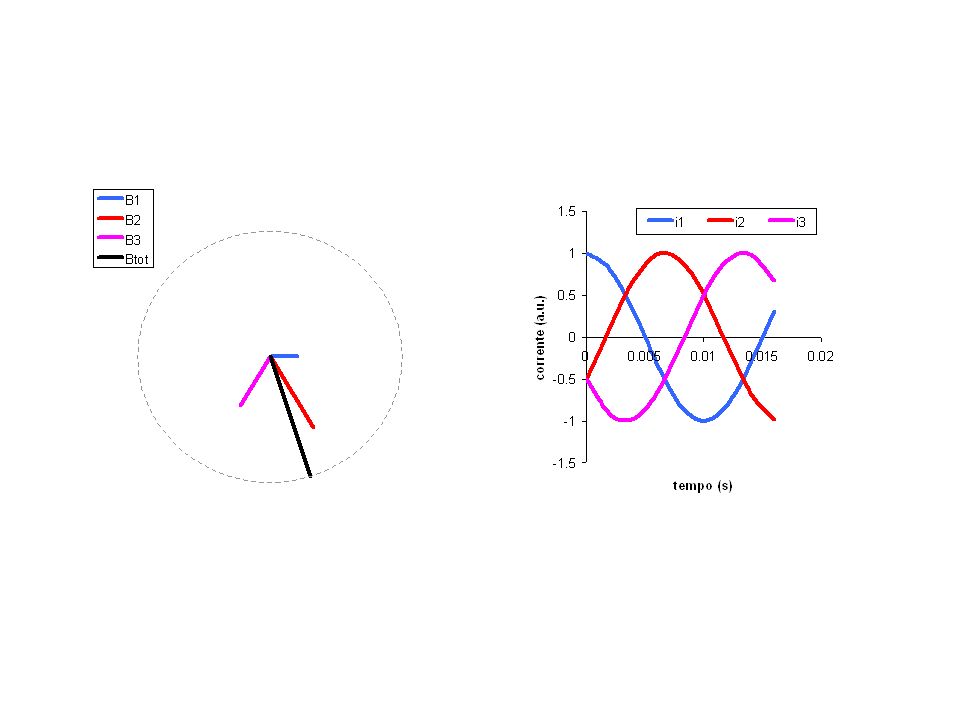
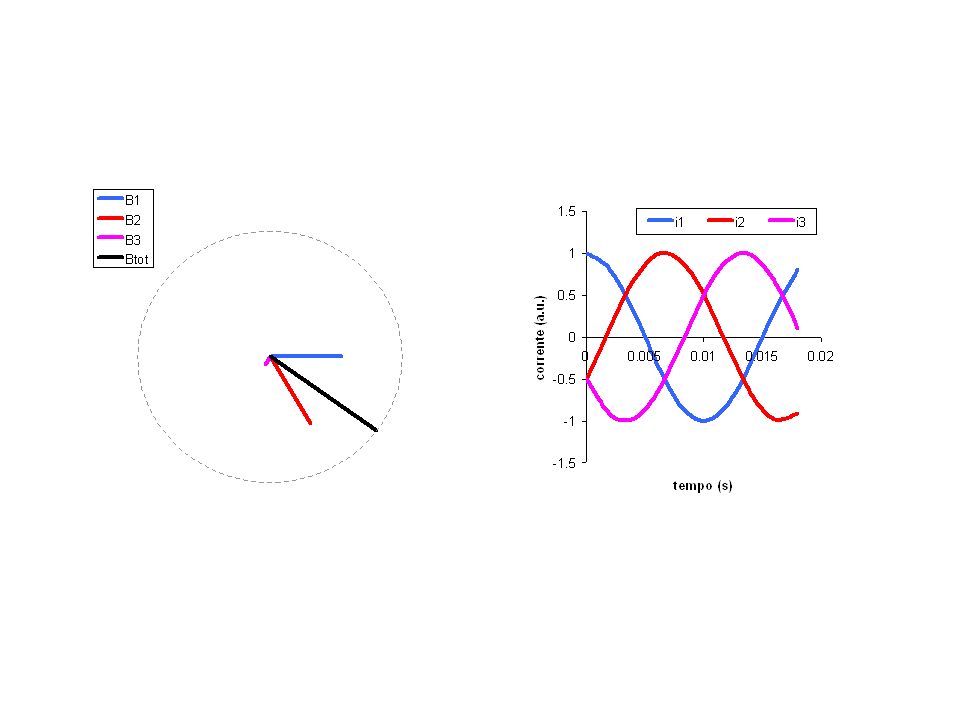
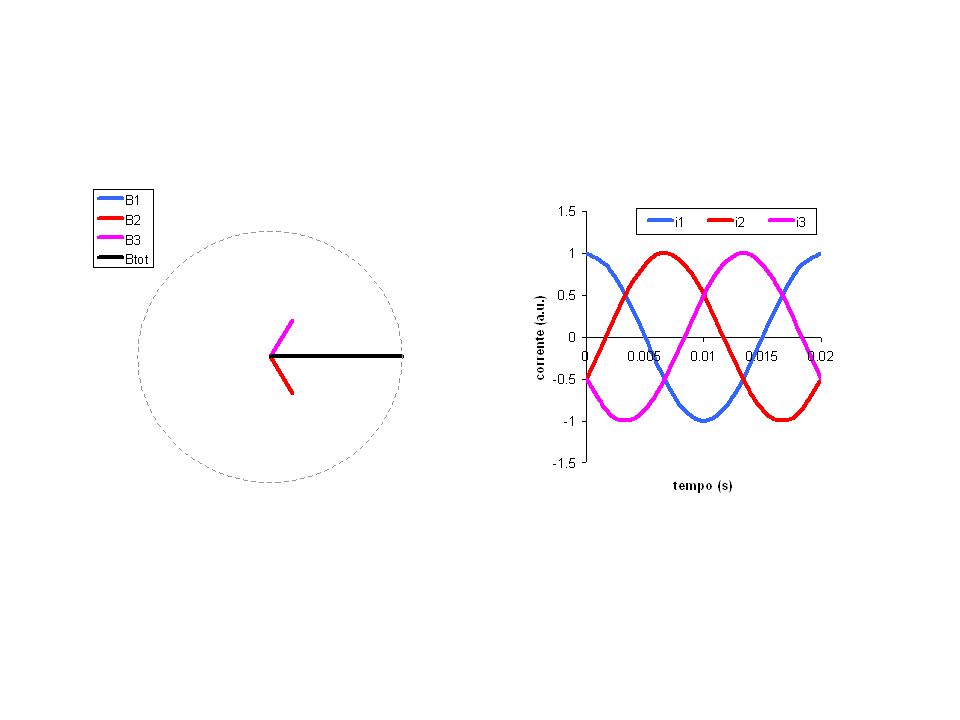
x1 + x2 x3 i1 i2 i3 Tre spire orientate a 120 ° l’una rispetto all’altra, percorse da un sistema di correnti equilibrato producono un campo magnetico che ruota con una velocità angolare c pari alla pulsazione delle correnti

30
Animazione

31
Scorrimento: rotore più lento del campo di statore (freccia gialla)
")
32
Generazione della coppia motrice nel motore asincrono

33
Vantaggi -peso ed ingombro ridotti a parità di potenza
-mancanza di dispositivi di eccitazione: la velocità del rotore è asincrona proprio per permettere variazione di flusso concatenato con gli avvolgimenti di rotore e quindi induzione magnetica (è anche chiamato motore a induzione) -autoavviante; -sviluppa spontaneamente, variando la propria velocità, una coppia motrice che controbilancia la coppia resistente funzionamento stabile (all’aumentare del carico rallenta) -sovraccaricabilità, anche del 100% della sua potenza nominale -manutenzione ridotta -semplicità di esercizio -alto rendimento
 -autoavviante; -sviluppa spontaneamente, variando la propria velocità, una coppia motrice che controbilancia la coppia resistente funzionamento stabile (all’aumentare del carico rallenta) -sovraccaricabilità, anche del 100% della sua potenza nominale. -manutenzione ridotta. -semplicità di esercizio. -alto rendimento.")
34
Aspetti vincolanti -all’avviamento, corrente di spunto anche 4-10In problemi alla rete (cadute di tensione) ed agli interruttori (intervento intempestivo) -corrente all’avviamento molto sfasata rispetto alla tensione la coppia di spunto è piccola nonostante l’elevata corrente assorbita -velocità di rotazione praticamente costante nel campo di funzionamento normale, perché strettamente legata alla frequenza della corrente di alimentazione -coppia massima costante ed ad una ben precisa velocità
 ed agli interruttori (intervento intempestivo) -corrente all’avviamento molto sfasata rispetto alla tensione la coppia di spunto è piccola nonostante l’elevata corrente assorbita. -velocità di rotazione praticamente costante nel campo di funzionamento normale, perché strettamente legata alla frequenza della corrente di alimentazione. -coppia massima costante ed ad una ben precisa velocità.")
35
Caratteristica meccanica del motore asincrono

36
Avviamento del motore -correnti di spunto elevate
-correnti sono notevolmente sfasate rispetto alle f.e.m. potenza assorbita piccola, coppia motrice piccola, poiché il circuito è fortemente induttivo (la gabbia rotorica è immersa nel ferro) Avviamento diretto: -se potenza del motore è piccola (<10 kW) avviati senza accorgimenti particolari perché la corrente di spunto è piccola, 3÷6In; Coppia di spunto circa uguale a quella nominale: 1,2÷3Cn
 Avviamento diretto: -se potenza del motore è piccola (<10 kW) avviati senza accorgimenti particolari perché la corrente di spunto è piccola, 3÷6In; Coppia di spunto circa uguale a quella nominale: 1,2÷3Cn.")
37
Avviamento a tensione ridotta: limitare la corrente di spunto riducendo la tensione di alimentazione
si riduce però anche la C di spunto usato solo con piccola coppia resistente all’avviamento, o se il motore ha C di spunto elevata

38
Nelle macchine con il rotore avvolto, è possibile avviare collegando in serie agli avvolgimenti di rotore un reostato di avviamento All’aumentare della resistenza del reostato -aumenta la coppia di spunto -si riduce la corrente di spunto

39
Durante l’avviamento il reostato può essere disinserito gradualmente;
Variazione della caratteristica della coppia al variare della resistenza rotorica:

40
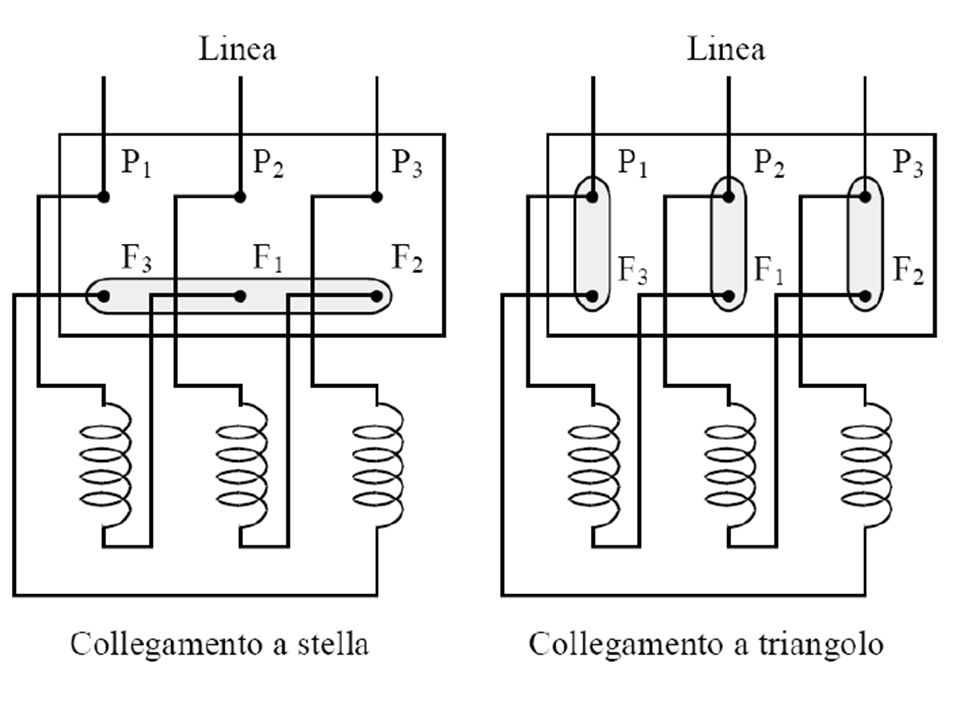
Avviamento stella-triangolo
Per motori dotati di sei morsetti e doppia tensione di alimentazione Per partenze a vuoto con Cr bassa e costante o leggermente crescente (ventilatori, pompe centrifughe di piccola P) Dopo un periodo di tempo idoneo: connessione avvolgimenti a Δ
 Dopo un periodo di tempo idoneo: connessione avvolgimenti a Δ.")
42
Conduttori percorsi da corrente
addensata verso la parte esterna della barra nella fase di avviamento, (a causa dell’alta frequenza all’avviamento e alta reattanza all’interno) Corrente nella parte interna nel funzionamento a regime
 Corrente nella parte interna nel funzionamento a regime.")
43
Rotore a doppia gabbia: la gabbia esterna ha conduttori con una sezione minore di quelli della gabbia interna. La corrente si distribuisce naturalmente, all’avviamento, maggiormente nella gabbia esterna; a regime maggiormente nella gabbia interna; la resistenza del rotore all’avviamento, pertanto, è maggiore si riduce la corrente di spunto; la coppia di spunto aumenta

44
Inversione di marcia Per invertire il senso di rotazione di un MAT è sufficiente invertire il senso di rotazione del campo rotante scambiare fra loro le correnti che alimentano due dei tre avvolgimenti

45
Motori asincroni monofasi
Un avvolgimento di statore monofase non produce un campo magnetico rotante, ma solo un campo pulsante; non ha coppia all’avviamento non può avviarsi da solo Si crea un finto sistema bifase con due avvolgimenti, uno principale e uno secondario, collegati alla stessa alimentazione; un condensatore in serie all’avvolgimento secondario sfasa la corrente in quell’avvolgimento si crea così un campo magnetico rotante

















 Generalità di Tipo Costruttivo>")


 Reti Elettriche Parte II Revisione aggiornata al 24 maggio 2011 (www.elettrotecnica.unina.it)>")
>")
 Reti Elettriche Parte II Revisione aggiornata al 16 maggio 2011 (www.elettrotecnica.unina.it)>")
 Reti Elettriche Parte II Revisione aggiornata al 6 giugno 2012 (www.elettrotecnica.unina.it)>")



