Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Un motion planner per guide multimediali interattive
Università degli studi di Bologna Facoltà di Ingegneria Corso di Laurea in Ingegneria Informatica Calcolatori Elettronici I Progetto SOLO Un motion planner per guide multimediali interattive Relatore: Prof. Tullio Salmon Cinotti Correlatori: Prof. Massimo Ferri Dott. Luca Roffia Ing. Pietro Azzari Tesi di Laurea di: Daniele Manzaroli

2
Campo applicativo Fruizione di beni culturali Percorso tematico
Guida multimediale interattiva Dispositivo mobile

3
Composizione del sistema
Mobile device Progetto “SOLO” Contenuti multimediali Scheda sensori

4
Composizione del sistema
Virgilio Virtuale Tracciatura itinerario Guida automatica Context sensitive Veloce, flessibile, portabile

5
Obiettivi principali Calcolo del percorso Precisione Sistema Real Time
Basse risorse hardware Precisione Velocità di elaborazione Scalabilità

6
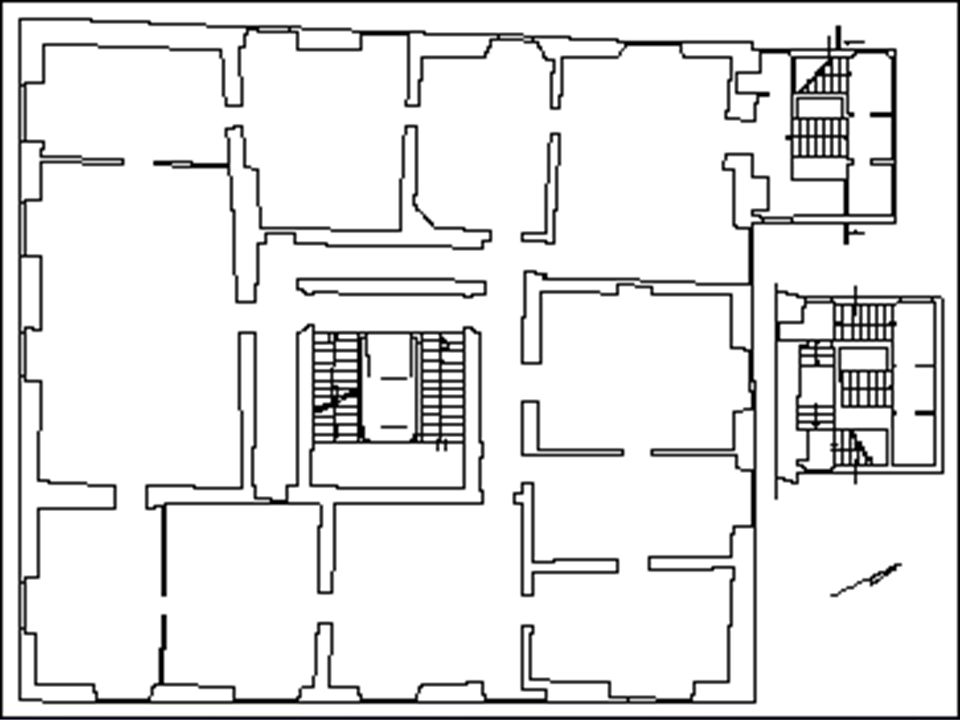
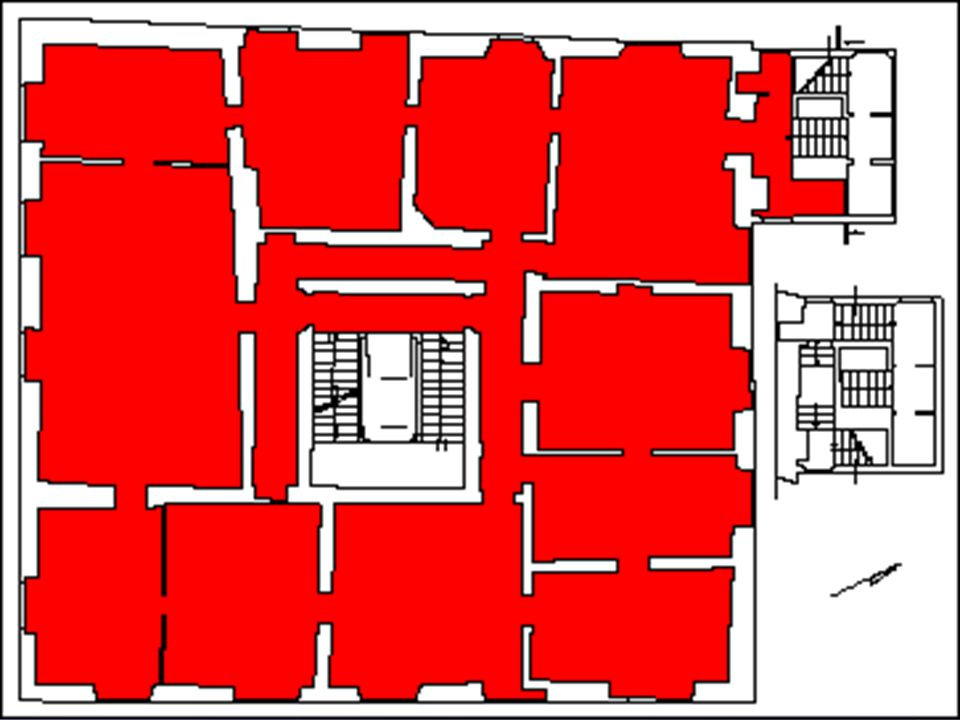
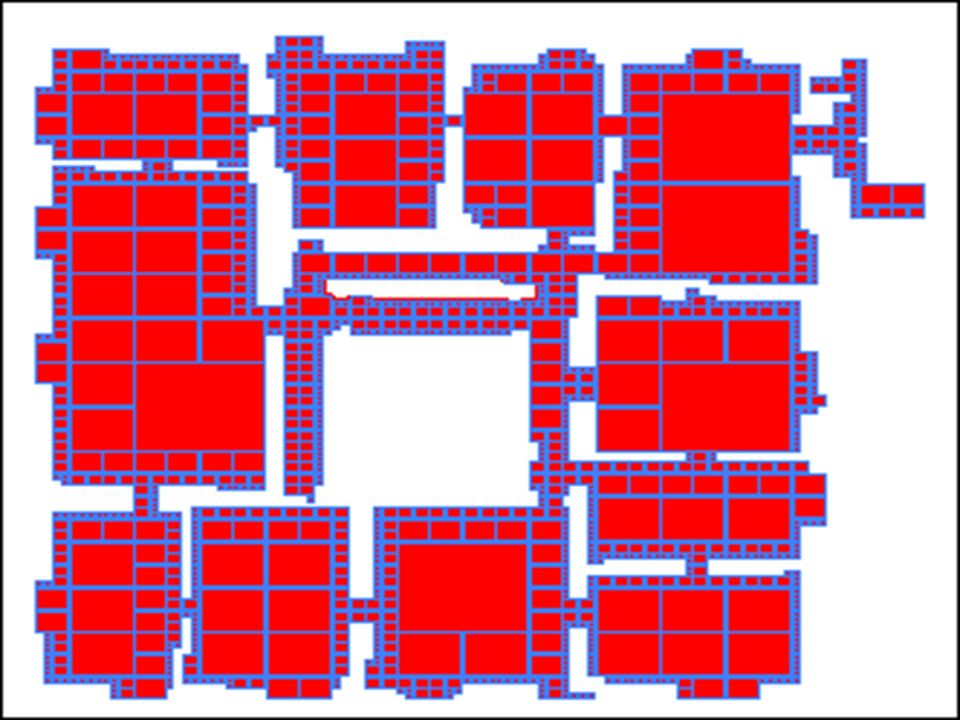
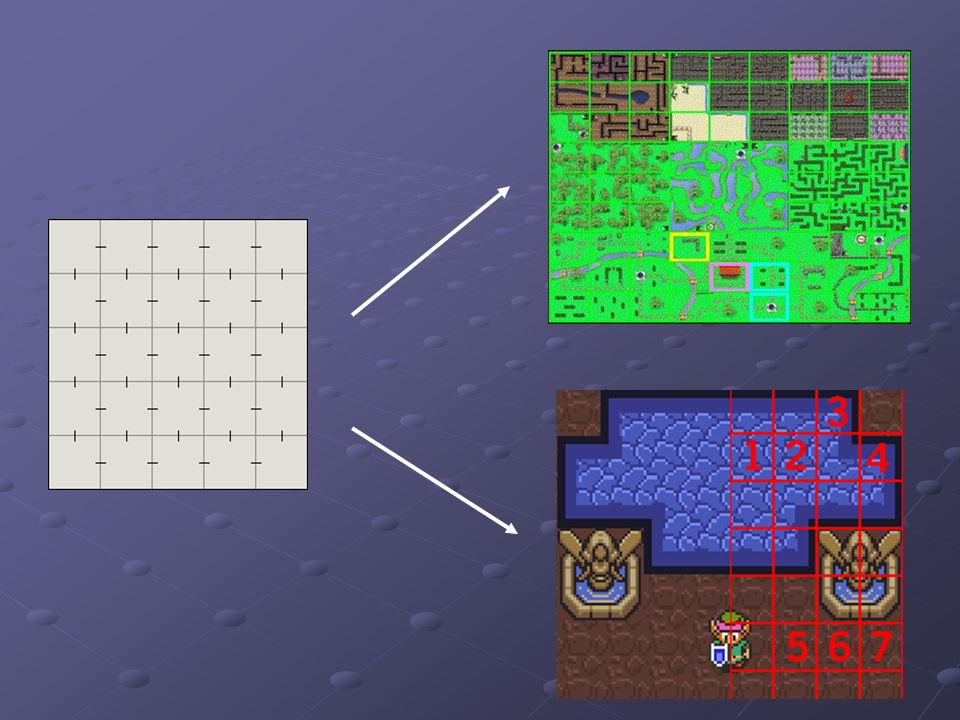
Problematiche di realizzazione
Rappresentazione dalla mappa in memoria: Soluzione adottata nel progetto: QUAD TREE like

11
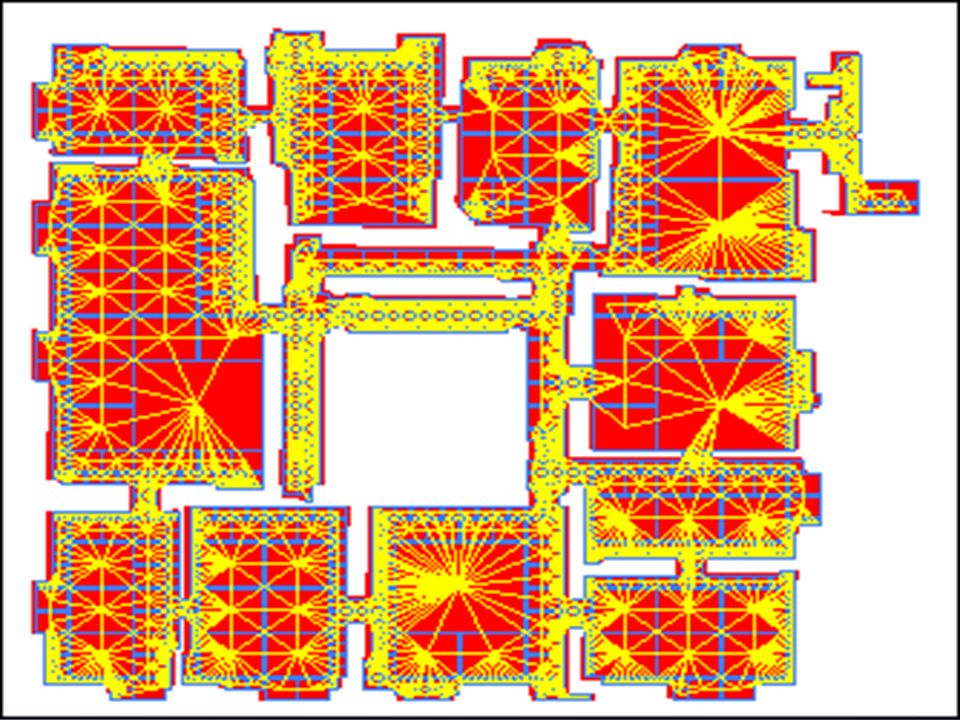
Calcolo del percorso: A* Algoritmo di ricerca informata - completo
- sotto determinate condizioni “ottimo”

12
Parametrizzazione delle Performance
Feature Size (Dettaglio della discretizzazione) Poche aree grandi Feature Size = 13 Si aggiungono aree più piccole Feature Size = 8 Maggiore definizione Feature Size = 3
 Poche aree grandi. Feature Size = 13. Si aggiungono aree più piccole. Feature Size = 8. Maggiore definizione. Feature Size = 3.")
13
Parametrizzazione delle Performance
Connessioni nodo-nodo (Intorno di ricerca)
")
14
Risultati sperimentali
Tempo di latenza

15
Risultati sperimentali
Occupazione di memoria

16
Risultati sperimentali
Occupazione di memoria (scala logaritmica)
")
17
Risultati sperimentali
Grado di similarità rispetto al percorso ottimo

18
Conclusioni Lavoro svolto: Obiettivi raggiunti
Compressione delle mappe con sistema Quad Tree like Ricerca del percorso ottimo su grafo non orientato Metodo di analisi dell’adiacenza ( Line of Sight ) Implementazione dell’A* per navigazione su grafi Applicazione delle metodologie sviluppate a casi di studio reali e pratici Obiettivi raggiunti Alta scalabilità (velocità di esecuzione) Ottimo bilanciamento tra carico computazionale e ottimalità del percorso
 Implementazione dell’A* per navigazione su grafi. Applicazione delle metodologie sviluppate a casi di studio reali. e pratici. Obiettivi raggiunti. Alta scalabilità (velocità di esecuzione) Ottimo bilanciamento tra carico computazionale e ottimalità del percorso.")
19
Sviluppi futuri Miglioramenti al processo Quad Tree
Smoothing del percorso Testare il sistema su dispositivo portabile Introdurre contenuti multimediali “case sensitive” Utilizzo del sistema in ambito culturale e fieristico

20
Grazie per l’attenzione

21
Dimostrazione ottimalità A*
f(n) = g(n) + h'(n), valutazione del percorso 0 <= h'(n) <= h*(n), ammissibilità Se la funzione euristica h’() è ammissibile, allora l'algoritmo A* troverà sempre il nodo goal ottimale
 = g(n) + h (n), valutazione del percorso. 0 <= h (n) <= h*(n), ammissibilità. Se la funzione euristica h’() è ammissibile, allora. l algoritmo A* troverà sempre il nodo goal ottimale.")
22
Dimostrazione ottimalità A*
Si supponga di avere generato un goal sub-ottimo G2 di G (cioè intendiamo che G e G2 portino allo stesso risultato ma con costi differenti). Sia n un nodo non espanso nella coda tale che n sia nel percorso più breve verso il goal ottimo G. NOTA: in questa dimostrazione il goal ha un significato generico
. Sia n un nodo non espanso nella coda tale che n sia nel percorso più breve. verso il goal ottimo G. NOTA: in questa dimostrazione il goal ha un significato generico.")
23
Dimostrazione ottimalità A*
• f(G2) = g(G2) poiché h(G2) = 0 • g(G2) > g(G) poiché G2 è solo sub-ottima • f(G) = g(G) poiché h(G) = 0 • f(G2) > f(G) da sopra • h(n) ≤ h*(n) poiché h e’ ammissibile • g(n) + h(n) ≤ g(n) + h*(n) • f(n) < f(G) Quindi f(G2 ) > f(n), e l’A* non selezionerà mai G2 per l’espansione. [c.v.d.]
 = g(G2) poiché h(G2) = 0. • g(G2) > g(G) poiché G2 è solo sub-ottima. • f(G) = g(G) poiché h(G) = 0. • f(G2) > f(G) da sopra. • h(n) ≤ h*(n) poiché h e’ ammissibile. • g(n) + h(n) ≤ g(n) + h*(n) • f(n) < f(G) Quindi f(G2 ) > f(n), e l’A* non selezionerà mai G2 per l’espansione. [c.v.d.]")
24
Definizione di metrica sui percorsi
Ogni percorso risulta essere una spezzata formata da archi di grafo e non può essere considerato come il grafico di una funzione. Tuttavia possiamo definire la metrica nel continuo assumendo i percorsi come curve non discretizzate monotone a tratti. Siano C e D due curve del piano, aventi gli stessi estremi, entrambe C2 a tratti. Definiamo: d(C,D) l'area della minima parte di piano P(C,D) che sia connessa per archi e contenga C e D. Essendo d() un’area, vale: d : C,D -> R0+ ( cioè d(C,D) >= 0 per ogni C,D) L’area P(C,D) è invariante rispetto all’ordine di considerazione delle curve, quindi: d(C,D) = d(D,C) Assumendo che una singola curva occupi un’area nulla, nel caso in cui le curve fossero coincidenti avremo: d(C,D) = ( <=> C=D , zero del campo )
 l area della minima parte di piano P(C,D) che sia connessa per archi e. contenga C e D. Essendo d() un’area, vale: d : C,D -> R0+ ( cioè d(C,D) >= 0 per ogni C,D) L’area P(C,D) è invariante rispetto all’ordine di considerazione delle curve, quindi: d(C,D) = d(D,C) Assumendo che una singola curva occupi un’area nulla, nel caso in cui le curve fossero coincidenti avremo: d(C,D) = 0 ( <=> C=D , zero del campo )")
25
Definizione di metrica sui percorsi
Sia E un'ulteriore curva. P(C,E) è contenuta in P(C,D) U P(D,E). Perciò: d(C,E) = Area(P(C,E)) Area(P(C,E)) <= Area(P(C,D) U P(D,E)) Area(P(C,D) U P(D,E)) <= Area(P(C,D)) + Area(P(D,E)) = d(C,D) + d(D,E) Quindi: d(C,E) <= d(C,D) + d(D,E) Questa è la proprietà triangolare, fondamentale per la definizione di una distanza in uno spazio metrico.
 è contenuta in P(C,D) U P(D,E). Perciò: d(C,E) = Area(P(C,E)) Area(P(C,E)) <= Area(P(C,D) U P(D,E)) Area(P(C,D) U P(D,E)) <= Area(P(C,D)) + Area(P(D,E)) = d(C,D) + d(D,E) Quindi: d(C,E) <= d(C,D) + d(D,E) Questa è la proprietà triangolare, fondamentale per la definizione di una distanza in uno spazio metrico.")
26
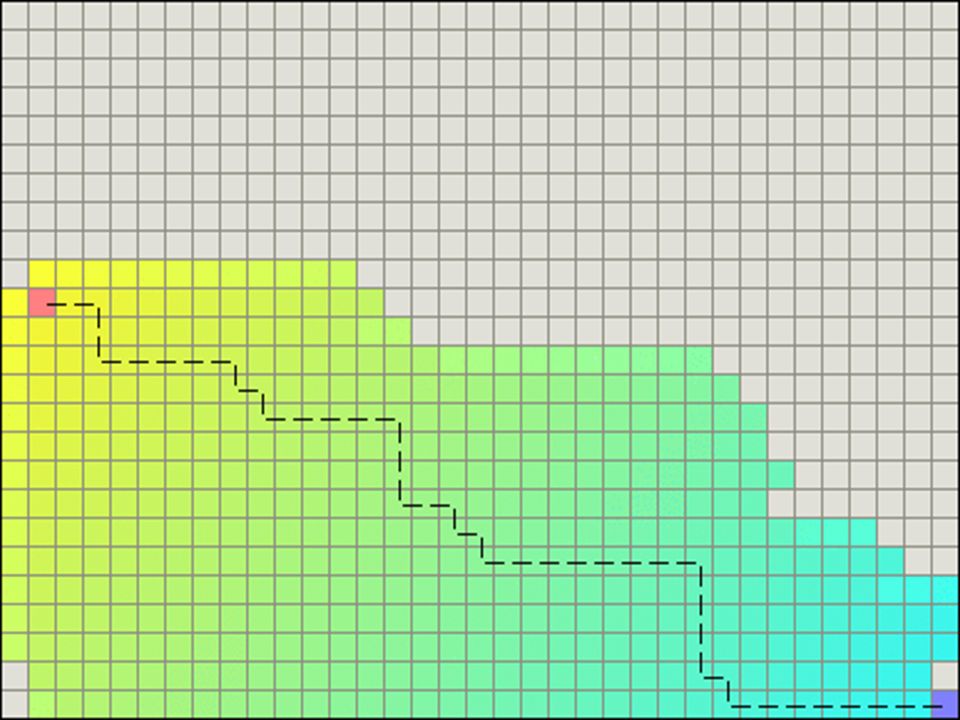
Esempi di ricerca del percorso

27
Esempi di ricerca del percorso

28
Esempi di ricerca del percorso

29
Esempi di Path Matching
Percorso ottimo

30
Esempi di Path Matching
Confronto con percorso a feature size e intorno di ricerca dei vicini modificato

31
Esempi di Path Matching
Notare il progressivo discostarsi dall’ottimo

32
Esempi di Path Matching

33
Esempi di Path Matching

34
Esempi di Path Matching
Massimo scostamento dall’ottimo

35
Path Matching, Metrica failure
Il confronto tramite una metrica che si basa unicamente sulla lunghezza dei percorsi non ci permette di individuare questi, e simili, casi. Con la nostra metrica possiamo individuare questi casi di differenza topologica dei percorsi da valutare e controllare poi sono accettabile o no.

36
Problematiche di realizzazione
Rappresentazione dalla mappa in memoria: Problema del commesso viaggiatore: Grafo orientato con pesi sugli archi

38
Problematiche di realizzazione
Rappresentazione dalla mappa in memoria: Tecniche in campo ludico: Tassellatura del terreno

40
Problematiche di realizzazione
Rappresentazione dalla mappa in memoria: Motion planner e ricerca informata: Spazio di ricerca discretizzato

42
Esempi di mappe utilizzate
Stress su Ricerca del percorso Labirinto ad alta complessità conputazionale

43
Esempi di mappe utilizzate
Valutazione prestazioni con stretti percorsi Bologna Centro urbano

44
Esempi di mappe utilizzate
Situazione mista (pertugi e ampi spazi) Sito archeologico di Pompei
 Sito archeologico. di Pompei.")
45
Esempi di mappe utilizzate
Aree geometricamente semplici Museo della Storia della Scienza di Firenze

46
Problematiche di realizzazione
Standard per la rappresentazione cartografica delle mappe Formati adottati: DXF e BMP

Presentazioni simili