UNIVERSITÀ DEGLI STUDI DI ROMA LA SAPIENZA DIPARTIMENTO DI INFORMATICA E SISTEMISTICA NONLINEARITÀ ALESSANDRO DE CARLI ANNO ACCADEMICO
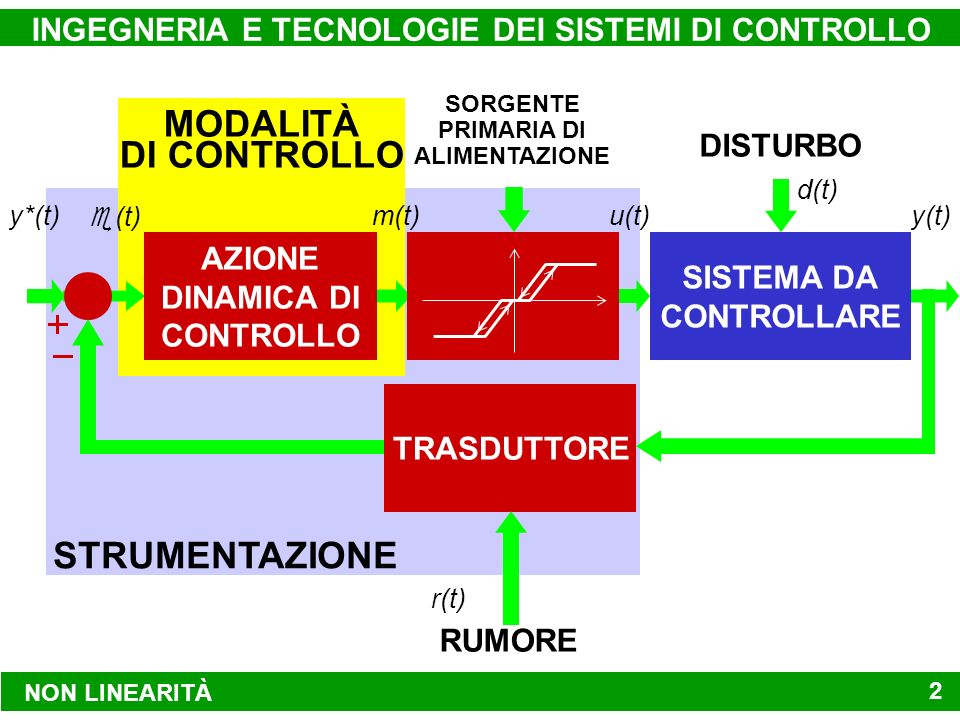
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 2 RUMORE STRUMENTAZIONE MODALITÀ DI CONTROLLO (t) m(t) DISTURBO SISTEMA DA CONTROLLARE u(t)y(t) d(t) ATTUATORE REGOLATORE P I D TRASDUTTORE r(t) y*(t) AZIONE DINAMICA DI CONTROLLO AMPLIFICATORE DI POTENZA NONLINEARE SORGENTE PRIMARIA DI ALIMENTAZIONE
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 3 NON LINEARITÀ TIPICHE DI UN ATTUATORE SATURAZIONE E SATURAZIONE SOGLIA ISTERESI
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 4 SISTEMA DA CONTROLLARE ATTUATORE MODALITÀ DI CONTROLLO y*(t)y(t) u(t)u*(t)e(t) d(t) ATTUATORE DIMENSIONATO AL 120% REGOLATORE DI TIPO INTEGRALE G(s) = KIKI s KIKI s 1 DISPOSITIVO DI MISURA CONTROREAZIONE ISTANTANEA PROPORZIONALE H(s) = 1 P(s) = 1 (1 + s) tempo (sec) K I = tempo (sec) K I = tempo (sec) K I =.21 EFFETTO DELLA SATURAZIONE
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 5 SISTEMA DA CONTROLLARE ATTUATORE MODALITÀ DI CONTROLLO y*(t)y(t) u(t)u*(t)e(t) d(t) DISPOSITIVO DI MISURA CONTROREAZIONE ISTANTANEA PROPORZIONALE H(s) = 1 P(s) = 1 s(1 + s) 3 ATTUATORE LINEARE G(s) = K P REGOLATORE DI TIPO PROPORZIONALE KPKP K P = tempo (sec) K P = tempo (sec) K P =.70 K P = tempo (sec) ATTUATORE ZONA MORTA 15 % EFFETTO DELLA SOGLIA
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 6 Y* 0 Y0Y0 U0U0 M0M0 E0E0 SISTEMA DA CONTROLLARE SOVRADIMENSIONATO ATTUATORE STRATEGIA DI CONTROLLO DISPOSITIVO DI MISURA FUNZIONAMENTO CONTINUATIVO IN REGIME PERMANENTE corsa otturatore M0M0 U0U0 VALVOLA DI REGOLAZIONE CARATTERISTICA STATICA
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 7 FUNZIONAMENTO PERTURBATO DA UN DISTURBO CARATTERISTICA STATICA Y* 0 SISTEMA DA CONTROLLARE SOVRADIMENSIONATO VALVOLA DI REGOLAZIONE STRATEGIA DI CONTROLLO DISPOSITIVO DI MISURA Y0Y0 U0U0 M0M0 E0E0 d(t) Y 0 + y(t) U 0 + u(t) M 0 + m(t) E 0 + e(t) u M0M0 corsa otturatore U0U0 m
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 8 COMPORTAMENTO DINAMICO NELLINTORNO DEL PUNTO DI LAVORO G(s) d(t) y(t) u(t)m(t) e(t) y*(t) P(s) G(s) = m(s) e(s) P(s) = y(s) u(s)
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 9 VERIFICA DI STABILITÀ G(s) (t) y(t) u(t)m(t) e(t) y*(t) = 0 P(s) RIPRISTINO DELLE CONDIZIONI DI FUNZIONAMENTO CONTINUATIVO A REGIME PERMANENTE DOPO LA PERTURBAZIONE PROVOCATA DA UN DISTURBO DI TIPO IMPULSIVO
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 10 VERIFICA DELLA STABILITÀ DI SISTEMI A CONTROREAZIONE CON NONLINEARITÀ ISTANTANEA IPOTESI 1 SISTEMA DA CONTROLLARE SOVRA- DIMENSIONATO 3 COMPORTAMENTO DINAMICO PROVOCATO DA DISURBI CASUALI 4 ATTUATORE NON LINEARE A DINAMICA PIÙ RAPIDA DI QUELLA DEL SISTEMA DA CONTROLLARE 2 FUNZIONAMENTO A REGIME PERMANENTE NELLINTORNO DI UN PUNTO DI LAVORO 5 CARATTERISTICA STATICA DELLA NON LINEARITÀ PARZIALMENTE NOTA, MA SEMPRE DI VALORE FINITO E CONTENUTA SOLO NEL PRIMO QUADRATE.
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 11 IPOTESI 9 DISTURBO CASUALE DI TIPO IMPULSIVO 7 DISPOSITIVO DI MISURA LINEARE E DI TIPO ISTANTANEO 11 CARATTERISTICA STATICA DELLA NON LINEARITÀ RELATIVA AL PUNTO DI LAVORO CONTENUTA SOLO NEL PRIMO E NEL TERZO QUADRATE. 10 MASSIMA ESCURSIONE DELLE VARIABILI NOTA 6 COMPORTAMENTO DINAMICO DEL SISTEMA DA CONTROLLARE LINEARE NELLINTORNO DEL PUNTO DI LAVORO 8 MODALITÀ DI CONTROLLO DI TIPO DINAMICO LINEARE A PARAMETRI COSTANTI 12LA NON LINEARITÀ RELATIVA AL PUNTO DI LAVORO ASSUME VALORE NULLO SOLO IN CORRISPONDENZA DEL PUNTO DI LAVORO
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO12 METODOVERIFICA CHE IL SISTEMA CONTROLLATO, UNA VOLTA PERTURBATO DA UN DISTURBO CASUALE DI TIPO IMPULSIVO, RITORNI NELLE STESSE CONDIZIONI DI FUNZIONAMENTO CHE SI AVEVANO PRIMA DELLA PERTURBAZIONE, OSSIA NELLE CONDIZIONI DI FUNZIONENTO DI TIPO CONTINUATIVO A REGIME PERMANRNTE
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO13 STRUTTURA DI RIFERIMENTO IPOTESI 7 VARIAZIONE DELLA VARIABILE DI RIFERIMENTO MANTENUTA AL VALORE NULLO, OSSIA y*(t) = 0 IPOTESI 6 DINAMICA DEL SISTEMA DA CONTROLLARE DESCRITTA DA P(s) IPOTESI 8 DINAMICA DELLA MODALITÀ DI CONTROLLO DESCRITTA DA G(s) IPOTESI 9 DISTURBO DI TIPO IMPULSIVO, OSSIA d(t) = (t) MODALITÀ DI CONTROLLO NON LINEARITÀ ISTANTANEA SISTEMA DA CONTROLLARE y*(t)y(t) d(t) u(t) f( u(t) ) y*(t) f( u(t) ) (t) G(s) P(s)
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO14 IPOTESI 9 CARATTERISTICA STATICA DELLA NON LINEARITÀ CONTENUTA NEL SETTORE ILLUSTRATO IN FIGURA u f (u) u = 0 f(0) = 0 f (u) u 0 < < f(u(t)) u(t) dt < 0
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO SISTEMA DA CONTROLLARE u(t) y(t) d(t) u(t)y(t) d(t) ( ) 3 x(t) = x(t) +u(t) y(t) = [ ] x(t) u(t)y(t) x 0 (t*) = [ (t*) 0 0 ] t* (t) IPOTESI 8 PERTURBAZIONE DI TIPO IMPULSIVO 10
MODELLO DINAMICO LINEARE NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 16 x(t) = A x(t) - b f(u(t)) u(t) = c x(t) y*(t) = 0 u(t) f (u(t)) d(t) x0x0 SCHEMA A BLOCCHI EQUIVALENTE u f (u) MODELLO NONLINEARITÀ ISTANTANEA
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 17 CRITERIO DI LIAPUNOV PER LA VERIFICA DELLA STABILITÀ FORMULAZIONE GENERALE V(t) = x(t) T P x(t) SI DEFINISCE P MATRICE SIMMETRICA DEFINITA POSITIVA SI RICAVA V (t)= x(t) T P x(t) + x(t) P x(t) TENUTO CONTO x(t) = A x(t) x(0) = x 0 = x(t) T (A T P + P A ) x(t) = x(t) T Q x(t) Q > 0 DEFINITA POSITIVA INSTABILITÀ Q = 0 SEMIDEFINITA POSITIVA STABILITÀ Q < 0 DEFINITA NEGATIVA STABILITÀ ASINTOTICA V(t) = [x(t) T A T P x(t) + x(t) T P A] x(t) =
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 18 FORMULAZIONE ESTESA ALLA NONLINEARITÀ ISTANTANEA IN CONTROREAZIONE V(t) = x(t) T P x(t) SI DEFINISCE SI RICAVA V (t)= x(t) T P x(t) + x(t) P x(t) TENUTO CONTO x(t) = A x(t) - b f(e(t)) x(0) = x 0 f(e(t)) e(t) dt t f(e(t)) e(t) x(t) T P [A x(t) - b f(e(t))] x(t) + 2 f(e(t)) c T x(t) = x(t) T (A T P + P A ) x(t) + 2 f(e(t)) [b T P - c T ] x(t) V(t) = [ x(t) T A T - b T f(e(t)) ] P x(t) + [b T P - c T ] NON LINEARITÀ
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 19 PER LA CLASSE DI SISTEMI DINAMICI IN CUI È POSSIBILE INDIVIDUARE UNA MATRICE DEFINITA POSITIVA P TALE DA SODDISFARE LA SEGUENTE RELAZIONE [b T P - c T ] = 0P b = c OSSIA IL SISTEMA A CICLO CHIUSO MANTIENE IL FUNZIONAMENTO NELLINTORNO DEL PUNTO DI LAVORO SE IL SISTEMA DA CONTROLLARE È STABILE ESEMPIO x(t) = x(t) u(t) 1x(t)y(t) =1.5 MODELLO DINAMICO DEL SISTEMA DA CONTROLLARE P = 1 LA MATRICE P SIA DEFINITA IN FORMA PARAMETRICA È DEFINITA POSITIVA SE - 2 > 0 s s + 2 s G(s) = = (s + 1)(s + 2) s NON LINEARITÀ
= Pbc INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 20 - SE I VALORI DI e CHE VERIFICANO LA CONDIZIONE P b = c SONO TALI DA RENDERE LA MATRICE P DEFINITA POSITIVA RISOLVENDO SI OTTIENE = 1, = 1.5 PER CUI =P IL SISTEMA A CICLO CHIUSO È STABILE - LA MATRICE Q = P A + A T P È DEFINITA NEGATIVA P A + A T P = = = q 11 = -4 < 0 q 11 q 22 - q 12 q 21 = (-5 -5) = -3 < 0 Q DEFINITA NEGATIVA LA CONDIZIONE DI STABILITÀ È VERIFICATA NON LINEARITÀ
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 21 A T P + P A + j P- j P = - [(-j I - A T ) P + P (j I - A T ) ] = - Q = Q (j I - A T ) = [(-j I - A T ) P(j I - A T ) -1 + P (j I - A T )(j I - A T ) -1 = Q (j I - A T ) -1 [ (-j I - A T ) P(j I - A T ) -1 + P ] = Q (j I - A T ) -1 (-j I - A T ) -1 [ (-j I - A T ) P(j I - A T ) -1 + (-j I - A T ) -1 P ] = Q (-j I - A T ) -1 (-j I - A T )
FORMA QUADRATICA DEFINITA POSITIVA PER ( j I - A T ) NON SINGOLARE NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 22 P (j I - A T ) -1 + (-j I - A T ) -1 P = Q (-j I - A T ) -1 P (j I - A T ) -1 + P (-j I - A T ) -1 > 0 P (j I - A T ) -1 +P (-j I - A T ) -1 > 0bTbT bTbT b bTbT COMPLESSE CONIUGATE 2 Re [b T P (j I - A) -1 b ] > 0
= c T (j I - A) -1 b bTPbTP NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 23 G(j ) = c T (j I - A) -1 b c T = b T P cTcT 2 Re [b T P (j I - A) -1 b ] > 0 Re [ G(j )] > 0 CONDUZIONE SUFFICIENTE AFFINCHÈ IL SISTEMA A CICLO CHIUSO, COSTITUITO DA UN SISTEMA DINAMICO STABILE LINEARIZZATO INTORNO AD UN PUNTO DI LAVORO, E DA UNA NON LINEARITÀ ISTANTANEA, LA CUI CARATTERISTICA STATICA SIA COMPRESA NEL PRIMO E NEL TERZO QUADRANTE E SIA NULLA SOLO NELLORIGINE, RITORNI NELLA CONDIZIONE DI FUNZIONAMENTO NOMINALE DOPO UNA PERTURBAZIONE DOVUTA AD UN DISTURBO DI TIPO IMPULSIVO
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 24 f (0) = 0 f (e) e < 0 < e f (e) Re [ G(j ) ] > 0 y*(t) = 0e(t) f [e(t)] y(t) (t) PER IL SISTEMA ILLUSTRATO IN FIGURA È VERIFICATA LA CONDIZIONE DI STABILITÀ ASSOLUTA
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 25 ( ) k * = - ( ) k e f(e) k e ( ) ( ) * ( ) * f (e) e k e
e(t) f [e(t)] e(t) f [e(t)] NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 26 t) 1 k
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 27 y* t)=0 f[e t)] y(t) G(j ) (t) e t) e(t) f [e(t)] t) 1 k G(j ) y* t)=0 y t)
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 28 e(t) f [e(t)] t) 1 k G(j ) y* t)=0 y t) f [e(t)] G(j ) y t) 1 k e(t) y* t)=0
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 29 f [e(t)] G(j ) y t) 1 k e(t) y* t)=0 y t) G(j ) + 1 k f [e(t)]e(t) y* t)=0 Re [ G(j ) + k ] > 0 1 k G( j ) k 1
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 30 SISTEMA DA CONTROLLARE INCERTEZZE DOVUTE ALLE VARIAZIONI DEI PARAMETRI FISICI G( j ) NONLINEARITÀ CARATTERISTICA STATICA COSTANTE SISTEMA DA CONTROLLARE A PARAMETRI COSTANTI G( j ) NONLINEARITÀ CARATTERISTICA STATICA VARIABILE IN UN SETTORE BEN DEFINITO k 2 k 1
e(t) f[e(t)] NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 31 k 2 k 1 e(t) f[e(t)] (k 2 - k 1 ) k1k1
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 32 e(t) f[e(t)] k1k1 k 2 - k 1 1
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 33 e(t) y*(t)=0 f[e(t)] G(j ) y(t) (t) k1k1 k 2 - k 1 1
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 34 y*(t)=0 G(j ) y(t) (t) k1k1 k 2 - k 1 1 f[e(t)]e(t) y*(t)=0 G(j ) y(t) (t) k1k1 k 2 - k 1 1 e(t) y*(t)=0 y(t) (t) k 2 - k 1 1 e(t) G(j ) 1+k 1 G(j ) y*(t)=0 y(t) (t) e(t) G(j ) 1+k 1 G(j ) 1 k 2 -k 1 +
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 35 y*(t)=0 y(t) (t) e(t) G(j ) 1+k 1 G(j ) 1 k 2 -k 1 + G(j ) 1+k 1 G(j ) 1 k 2 -k 1 + Re> 0
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 36 G(j ) 1+k 1 G(j ) 1 k 2 -k 1 + Re> 0 1 k 2 -k 1 1+k 2 G(j )-k 1 G(j )+k 1 G(j ) 1+k 1 G(j ) Re > 0 1+k 2 G(j ) 1+k 1 G(j ) Re > 0
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 37 1+k 2 G(j ) 1+k 1 G(j ) Re > 0 Re> 0 +G(j ) 1 k1k1 1 k2k2 Re[G(j )]+ 1 k1k1 1 k2k2 Im[G(j )] + > 0 2
X YX NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 38 Re[G(j )]+ 1 k1k1 1 k2k2 + > 0 Im[G(j )] 2 Re[G(j )] 2 Im[G(j )] 2 Re[G(j )] k1k1 1 k2k k 1 k 2 > k1k1 1 k2k2 1 k 1 k 2 > 0 X 2 + Y 2 + X +X + EQUAZIONE DI UNA CIRCONFERENZA
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 39 Re[G(j )] Im[G(j )] G(j ) - 1 k2k2 - 1 k1k1 + 1 k1k1 1 k2k2 1 k 1 k 2 > 0 X 2 + Y 2 + X +X +
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 40 d(t) MODALITÀ DI CONTROLLO SISTEMA DA CONTROLLARE y*(t)y(t) u(t) f( u(t) ) ATTUATORE VALVOLA DI REGOLAZIONE REGOLATORE P D y*(t)=0 (t) P(s) K P + K D sk(1 + q s) G(s) = 1 + q s G(s) P(s) = ( 1 + q s ) P(s) 1 + q sG(s) k Re [ G(j ) P(j ) + ] > 0 1 k Re [ (1 + j q ) P(j ) + ] > 0 1 k NON LINEARITÀ Re[P(j ) ] - q Im[P(j )] + > 0 1 k
YX NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 41 Re[P(j ) ] - q Im[P(j )] + > 0 1 k EQUAZIONE DI UNA RETTA Re[P(j )] Im[P(j )] 1 k - 1 q k P*(j ) = Re[P(j )] + j Im[P(j )]
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 42 d(t) MODALITÀ DI CONTROLLO SISTEMA DA CONTROLLARE y*(t)y(t) u(t) f( u(t) ) ATTUATORE VALVOLA DI REGOLAZIONE y*(t)=0 (t) P(s) G(s) = 1 + q s G(s) P(s) = ( 1 + q s ) P*(s) Re [ G(j ) P*(j ) + ] > 0 1 k Re [ (1 + j q ) P*(j ) + ] > 0 1 k NON LINEARITÀ Re[P*(j ) ] - q Im[P*(j )] + > 0 1 k G(s) REGOLATORE P I D K P +K D s + KIKI s K s (1+ 1 s)(1+ 2 s) K(1+ 1 s) P(s) (1+ 2 s) s k(1 + q s) P(s) s P*(s) 1 + q s k
YX NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 43 Re[P*(j ) ] - q Im[P*(j )] + > 0 1 k EQUAZIONE DI UNA RETTA Re[P(j )] Im[P(j )] Re[P*(j )] + j Im[P*(j )] 1 k - 1 q k
1 k P(j Re Im NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 44 Re[P(j )] - Im[P(j )] + > 0 1 k* Re[P(j ) + ] > 0 1 k 1 k* P*(j Re Im
d (t) (t) NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 45 G(s) NON LINEARITÀ y*(t) = 0 y(t) e(t) f (e(t)) tempo
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 46 EFFETTI DELLA NONLINAERITÀ SULLANDAMENTO DELLE VARIABILI DI INGRESSO E DI USCITA VARIABILE DI INGRESSO VARIABILE DI USCITA SINUSOIDALEDISTORTA NONLINEARITÀ ARMONICA FONDAMENTALE DISTORSIONE UTILIZZABILE AI FINI DEL CONTROLLO QUASI TOTALMENTE ATTENUATA DAL SISTEMA DA CONTROLLARE DALLA STRATEGIA DI CONTROLLO AL SISTEMA DA CONTROLLARE
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 47 VARIABILE DI INGRESSO SINUSOIDALE NONLINEARITÀ VARIABILE DI USCITA ARMONICA FONDAMENTALE ARMONICHE SUPERIORI EFFETTO QUASI TRASCURABILE SULLANDAMENTO DELLA VARIABILE CONTROLLATA DINAMICA LAMPIEZZA DIPENDE SIA DALLAMPIEZZA SIA DALLA PULSAZIONE DELLA SINUSOIDE DI INGRESSO. ISTANTANEA LAMPIEZZA DIPENDE SOLO DALLAMPIEZZA DELLA SINUSOIDE DI INGRESSO. IN UN SISTEMA A CONTROREAZIONE, LA NONLINAERITÀ PUÒ ESSERE VISTA COME UN ELEMENTO CARATTERIZZATO DA UN GUADAGNO VARIABILE SIA CON LAMPIEZZA SIA CON LA PULSAZIONE DEL SEGNALE DI INGRESSO
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 48 VARIABILE DI INGRESSO SINUSOIDALE ARMONICA FONDAMENTALE ARMONICHE SUPERIORI EFFETTO QUASI TRASCURABILE SULLANDAMENTO DELLA VARIABILE CONTROLLATA NONLINEARITÀ ISTANTANEA SIMMETRICA AD UN VALORE NONLINEARITÀ ISTANTANEA SIMMETRICA A DUE VALORI LO SFASAMENTO FRA LARMONICA FONDAMENTALE E LA SINUSOIDE DI INGRESSO DIPENDE DALLAMPIEZZA DI QUESTULTIMA SFASAMENTO NULLO FRA SINUSOIDE DI INGRESSO E ARMONICA FONDAMENTALE VARIABILE DI USCITA
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 49 FUNZIONAMENTO IN OSCILLAZIONE PERMANENTE IN OSCILLAZIONE PERMANENTE LA NONLINEARITÀ È ASSIMILABILE AD UN GUADAGNO VARIABILE FUNZIONE DELLA: - PULSAZIONE * DELLA OSCILLAZIONE PERMANENTE; - AMPIEZZA E* DELLA ARMONICA FONDAMENTALE. d (t) (t) y*(t) = 0 y(t) e(t) f (e(t)) NON LINEARITÀ P(j ) ARMONICA FONDAMENTALE E RESIDUO ARMONICO OSCILLAZIONE PERMANENTE ASSIMILABILE AD UNA SINUSOIDE
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 50 FUNZIONE DESCRITTIVA IL GUADAGNO VARIABILE FUNZIONE, CALCOLATO COME RAPPORTO FRA LAMPIEZZA DELLA ARMONICA FONDAMENTALE DELLA VARIABILE DI USCITA DALLA NONLINEARITÀ E LAMPIEZZA DELLA SINUSOIDE DI INGRESSO ALLA NONLINEARITÀ, È DETTA FUNZIONE DESCRIVA E INDICATA CON D(E*, * ) y(t) e(t) f (e(t)) D(E*, *) FUNZIONE DESCRITTIVA P(j ) y*(t) = 0 (t) D(E*, *) = AMPIEZZA DELLA ARMONICA FONDAMENTALE DELLA VARIABILE DI USCITA AMPIEZZA DELLA SINUSOIDE DI INGRESSO
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 51 ANDAMENTI DI ALCUNE FUNZIONI DESCRITTIVE e f(e) e D(e) e f(e) e D(e) 1 e f(e) 1 e D(e) 1 1
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 52 ANDAMENTI DI ALCUNE FUNZIONI DESCRITTIVE e f(e).2 e D(e) e f(e) e D(e) Re[D(e)] Im[D(e)]
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 53 d (t) (t) G(s) y*(t) = 0 y(t) e(t) f (e(t)) k P(j ) W(j ) = kP(j ) 1 + kP(j ) CONDIZIONE DI OSCILLAZIONE PER UN SISTEMA LINEARE ASSEGNATA LA P(j ), INDIVIDUARE I VALORI DEL GUADAGNO k E DELLA PULSAZIONE RELATIVE ALLA OSCILLAZIONE AL LIMITE DI STABILITÀ
GLI ALTRI POLI CON PARTE REALE NEGATIVA NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 54 W(j ) = kP(j ) 1 + kP(j ) = k N(P(j )) D(P(j )) + k N(P(j )) = k N(P(j )) (j ) ( (j ) ) = k N(P(j )) (j ) ( ) 0 W(j ) = CONDIZIONE DI OSCILLAZIONE AL LIMITE DI STABILITÀ j j -j COPPIA DI POLI COMPLESSI CON PARTE REALE NULLA CONDIZIONE DI OSCILLAZIONE RELATIVA A W(j )
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 55 CONDIZIONE DI OSCILLAZIONE RELATIVA A G(j ) Re[P(j )] Im[P(j )] - 1 k P(j ) Re[P(j )] = - 1 k Im[P(j )] = 0 modulo |P(j )| = 1 k fase [P(j )] = - y( t +T ) = y( t ) CONDIZIONE DI OSCILLAZIONE RELATIVA A y(t) tt+T t+2T y ( t + ) = - y( t ) T 2 tt+T/2 t+T
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 56 CONDIZIONE DI OSCILLAZIONE PERMANENTE OVVERO DI ESISTENZA DI CICLO LIMITE SI DEFINISCE CICLO LIMITE UNA OSCILLAZIONE PERMANENTE DI PULSAZIONE COSTANTE E DI FORMA CHE SI RIPETE CICLICAMENTE IN CORRISPONDENZA DEL FUNZIONAMENTO IN CICLO LIMITE SI HA: W(j *) = D(E*, *) P(j *) 1 + D(E*, *) P(j *) = OSSIA 1 + D(E*, *) P(j *) = 0 CONDIZIONE DI ESISTENZA DEL CICLO LIMITE PER SPECIFICI VALORI DI E* E DI * SE IL SISTEMA DA CONTROLLARE HA CARATTERISTICHE FILTRANTI TALI DA RENDERE TRASCURABILE IL RESIDUO ARMONICO
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 57 SE LA NONLINEARITÀ È ISTANTANEA LA FUNZIONE DESCRITTIVA DIPENDE SOLO DALLA AMPIEZZA DELLA SINUSOIDE DI INGRESSO. LA CONDIZIONE DI ESISTENZA DI CICLO LIMITE RISULTA PERTANTO: 1 + D(E*) P(j *) = 0 VERIFICA DI ESISTENZA DEL CICLO LIMITE VERIFICA SE ESISTONO ESISTONO VALORI DI E* E DI * PER CUI È VERIFICATA LA SEGUENTE RELAZIONE P(j *) = - 1 D(E*)
LA CONDIZIONE DI ESISTENZA DEL CICLO LIMITE È VERIFICATA ! NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 58 I VALORI DI E* E DI * SONO INDIVIDUATI TRACCIANDO SEPARATAMENTE IL LUOGO DI P(j ) PER COMPRESO FRA 0 E E IL LUOGO DI -1/D(e) PER e COMPRESO FRA 0 E = = 0 P(j ) e e 0 D(e) 1 SOLO SE I LUOGHI SI INTERSECANO LA CONDIZIONE DI ESISTENZA DEL CICLO LIMITE È VERIFICATA = = 0 P(j ) e = 0 e
LA CONDIZIONE DI ESISTENZA DEL CICLO LIMITE NON È VERIFICATA NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 59 SE IL SISTEMA A CONTROREAZIONE FOSSE STATO LINEARE SAREBBE STATO STABILE tempo uscita forzamento LA NON LINEARITÀ DEGRADA LE PRESTAZIONI MA NON ALTERA LA STABILITÀ e 0 LUOGO RELATIVO ALLA FUNZIONE DESCRITTIVA DI UNA NONLINEARITÀ DI TIPO A SATURAZIONE 1 D(e)
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 60 CICLO LIMITE STABILE 0 e e CICLO LIMITE INSTABILE D(e) 1 e FUNZIONE DESCRITTIVA D E(e) d e < 0 PUNTI DI LAVORO STABILI * E* y*(t) = 0 y(t) e(t) f (e(t)) (t)
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 61 D(e) 1 e FUNZIONE DESCRITTIVA = 0 = e = 0 e * = E* = 0 RISULTATO NON VALIDO !! IL CICLO LIMITE HA PULSAZIONE E AMPIEZZA FINITI !! CONDIZIONE DI ESISTENZA DEL CICLO LIMITE y*(t) = 0 y(t) e(t) f (e(t)) (t) = 0 = RISULTATO VALIDO
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 62 CALCOLO DIRETTO DELLANDAMENTO DEL CICLO LIMITE VIENE APPLICATO QUANDO È ASSEGNATO : - UN MODELLO AFFIDABILE DEL SISTEMA DA CONTROLLARE; - LA CARATTERISTICA STATICA DELLA NON LINEARITÀ IN UNA FORMA ANALITICA DI TIPO POLINOMIALE VIENE FISSATA LA CONDIZIONE DI PERIODICITÀ x(t) = A x(t) + b u(t) y(t) = c T x(t) u(t) = f(y(t)) DAL MOMENTO CHE LA NON LINEARITÀ È INSERITA IN SISTEMA A CONTROREAZIONE, IL MODELLO RISULTA: x(t) = A x(t) - b f [c T x(t)] y(T) = y(0)
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 63 PROCEDURA: - IN CORRISPONDENZA DI UN VALORE ASSEGNATO DEL PERIODO T VIENE RICAVATO IL VALORE DELLA VARIABILE DI USCITA. PER TRACCIARE LANDAMENTO DEL CICLO LIMITE OCCORRE DETERMINARE IL PERIODO T E IL VALORE DELLE CONDIZIONI INIZIALI x(0) = x 0 y(T) = c T x(T) = c T (T) x 0 + c T (T) - VIENE CALCOLATO IL VALORE DELLE CONDIZIONI INIZIALI x 0 IN FUNZIONE DEL VALORE ASSEGNATO DEL PERIODO T x 0 (T) = - [ I + (T) ] -1 + (T) - VIENE INSERITA LA CONDIZIONE DI PERIODICITÀ x 0 (T) = (T) x 0 + (T) - VIENE CALCOLATO IL VALORE DELLA VARIABILE DI USCITA y(T) RELATIVA ALLE CONDIZIONI INIZIALI x 0 (T) PRECEDENTEMENTE RICAVATE
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 64 - VIENE VERIFICATO SE LA CONDIZIONE DI PERIODICITÀ È EFFETTIVAMENTE VERIFICATA - SE LA CONDIZIONE DI PERIODICITÀ NON È VERIFICATA VIENE MODIFICATO IL VALORE DEL PERIODO T E LA PROCEDURA RIPARTE DALLINIZIO - SE LA CONDIZIONE DI PERIODICITÀ È VERIFICATA VIENE CALCOLATO LANDAMENTO DELLA VARIABILE DI USCITA y(t) ALLINTERNO DEL PERIODO. - SE LA NONLINEARITÀ È SIMMETRICA VIENE FISSATO IL SEMIPERIODO T/2 E VIENE ADEGUATA LA CONDIZIONE DI PERIODICITÀ ESEMPIO DI APPLICAZIONE x(t) =x(t) + u(t) È ASSEGNATO IL MODELLO DEL SISTEMA DA CONTROLLARE y(t) = [ ] x(t)
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 65 È LA NONLINEARITÀ È COSTITUITA DA UN RELÈ. IL MODELLO ANALITICO RISULTA u(t) = - sign [ y(t) ] DAL MOMENTO CHE TALE NONLINEARITÀ È DEL TIPO ISTANTANEO E SIMMETRICO, IL METODO SARà APPLICATO FACENDO RIFERIMENTO AL SEMIPERIODO, OSSIA A T/2 PER INIZIALIZZARE IL METODO, UNA PRIMA STIMA DELLA DURATA DEL SEMIPERIODO VIENE EFFETTUATA DALLA DETERMINAZIONE DELLA PULSAZIONE IN CORRISPONDENZA DELLA QUALE LA PARTE IMMAGINARIA DELLA FUNZIONE DI TRASFERMENTO NEL CASO IN ESAME SI HA: PER = 1.73 SI HA Im[P(j *)] = 0 DA CUI T* = 3.6 E T*/2 = 1.8 VIENE CALCOLATO y 0 (T/2) = c T x 0 (T/2) PER T/2 VARIABILE FRA.8 (T*/2) E 1.2 (T*/2) LA CODIZIONE DI PERIODICITÀ COINCIDE CON QUELLA DI COMMUTAZIONE E RISULTA y(T/2) = 0
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO T/2 y 0 (T/2) T*/2 =1.84 VIENE TRACCIATO LANDAMENTO DI y 0 (T/2) IN FUNZIONE DI T/2 IN CORRISPONDENZA DI y 0 (T/2) = 0 SI INDIVIDUA IL VALORE DI T*/2 LE CORRISPONDENTI CONDIZIONI INIZIALI x 0 (T*/2) RISULTANO x 0 (T*/2) = UNA VOLTA DETERMINATI T*/2 E x 0 (T*/2) SI CALCOLA LANDAMENTO DELLA OSCILLAZIONE. NEL CASO PARTICOLARE SI HA t (sec) 1 0 y(t) T = 3.68
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 67 P W M PULSE WIDTH MODULATION SISTEMA DA CONTROLLARE ATTUATORE ON-FF DISPOSITIVO DI MISURA y(t) y*(t) e(t)m(t) u(t) p(t) tempo m(t) e(t) p(t)
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 68 P W M PULSE WIDTH MODULATION SISTEMA DA CONTROLLARE ATTUATORE ON-FF DISPOSITIVO DI MISURA y(t) y*(t) e(t)m(t) u(t) p(t) tempo e(t) m(t) p(t)
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 69 (0) = 0 (t) = (t) u(t) = T (t) y(t) = c T x(t) x(t) = A x(t) + b u(t) x(0) = x 0 y(t)u(t) tempo u(t) 1 a = 0 1 = 0 a 0 = tempo u(t) = 0 1 = = tempo u(t) UoUo 0 = 1 = a 0 =
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 70 x(0) = x 0 (0) = 0 (t) = (t) u(t) = T (t) y(t) = c T x(t) x(t) = A x(t) + b u(t) y(t)u(t) (t) = x(t) (t) S = A b T 0 = x0x0 0 A B T (t) cTcT 0 I 0 y(t) u(t)
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 71 x(t) = (t) x 0 + (t) 0 t1t1 t2t2 a1a1 a2a2 ESEMPIO DI APPLICAZIONE PER IL CALCOLO DELLANDAMENTO DELLA VARIABILE DI USCITA NEL FUNZIONAMENTO A REGIME PERMANENTE x0x0 y(t) = c T x(t) x(t) = A x(t) + b u(t) y(t) u(t) e S t = e A te A t e t 0 (e A t e t ) b (t) A -1 (e A t – I)b (t)
CONDIZIONE DI PERIODICITÀ NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 72 t1t1 t2t2 a1a1 a2a2 0 a1a1 0 1 = 0 -a = (t 1 ) (t 2 ) x0x0 x(t 1 )x0x0 x(t 1 ) = (t 1 ) x 0 + (t 1 ) 01 x(t 2 ) = (t 2 ) x(t 1 ) + (t 2 ) 02 = x 0 x 0 = (t 2 )( (t 1 ) x 0 + (t 1 ) 01 ) + (t 2 ) 02 x 0 = ( (t 2 ) (t 1 ) – I ) -1 ( (t 2 ) (t 1 ) 01 + (t 2 ) 02 ) PER 0 < t < t 1 y(t) = c T x(t) = c T ( (t) x 0 + (t) 01 ) PER 0 < t < t 2 y(t) = c T x(t) = c T ( (t) x(t 1 ) + (t) 02 )
P W M PULSE WIDTH MODULATION SISTEMA DA CONTROLLARE ATTUATORE ON-FF y(t)m(t) u(t) NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 73 (s+1)(s+3) 2s+6 s 1 s 2 +.5s METODO DIRETTO2 ITERAZIONI: 1 CONDIZIONI INIZIALI 2 TRACCIAMENTO METODO INDIRETTO18 ITERAZIONI: 2 AGGIORNAMENTO DELLE CONDIZIONI INIZIALI 1 TRACCIAMENTO tempo T
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 74 y(t) = c T x(t) x(t) = A x(t) + b u(t) x0x0 (0) = 0 (t) = (t) u(t) = T (t) u(t) y(t) (t) = (t) + y(t) 0 = 0 (1) (2) = 2 T n 2 T - n 0 0 = 0 2 T 1) = 0 T 2 T n cos () t y(t) dt 2 T 2) = 0 T 2 T n sin () t y(t) dt 2 T y(t) = c T x(t) = c T ( (t) x 0 + (t) 0 )
NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO 75 (t) = (t) = S c T 0] 0 0 = 0 0 (t) = (t) (0) = 0 x(t) (t) VARIABILI DI STATO FORZAMENTO COMPONENTI IN FASE E IN QUADRATURA A 0 c T 0 0 b 0 x(t) (t) = 0 x0x0 0 x0x0 0
t T NON LINEARITÀ INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO ordine delle armoniche PROCEDURA: 1 VENGONO CALCOLATE LE CONDIZIONI INIZIALI x 0 PER IL TRACCIAMENTO DELLANDAMENTO PERIODICO 2 VENGONO INSERITE LE CONDIZIONI INIZIALI x 0 NEL VETTORE (t) PER IL CALCOLO DELLE CONPONENTE ARMONICHA DI ORDINE n 3 VIENE RIPETUTO IL CALCOLO ENTRO LO SPETTRO DI INTERESSE 4 VIENE RICOSTRUITO LANDAMENTO UTILIZZANDO LE ARMONICHE