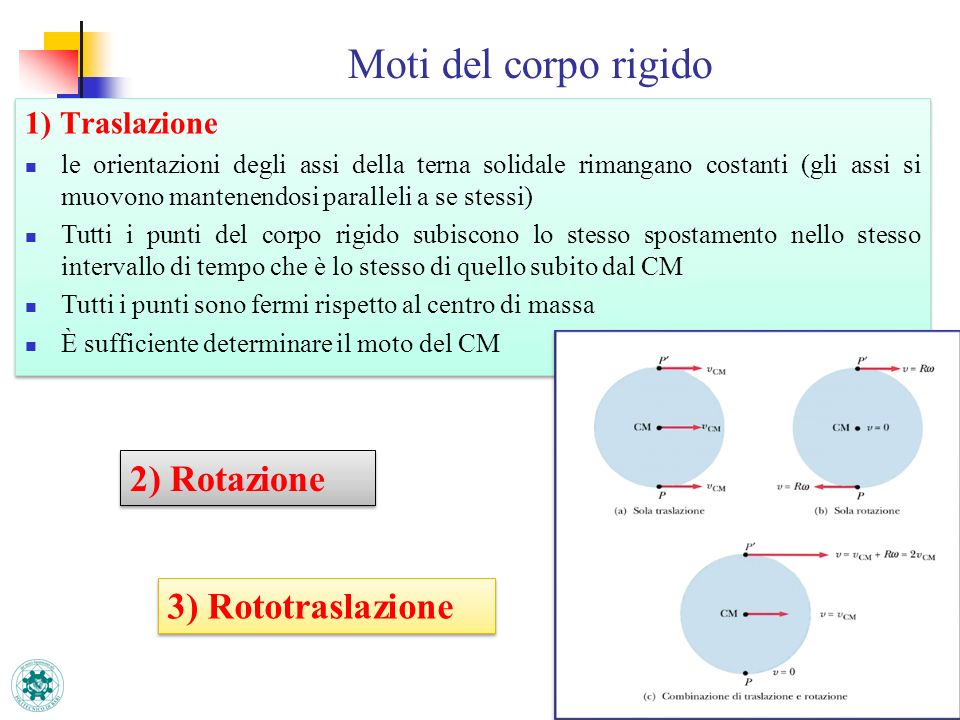
Moti del corpo rigido 2) Rotazione 3) Rototraslazione 1) Traslazione le orientazioni degli assi della terna solidale rimangano costanti (gli assi si muovono mantenendosi paralleli a se stessi) Tutti i punti del corpo rigido subiscono lo stesso spostamento nello stesso intervallo di tempo che è lo stesso di quello subito dal CM Tutti i punti sono fermi rispetto al centro di massa È sufficiente determinare il moto del CM 2) Rotazione 3) Rototraslazione
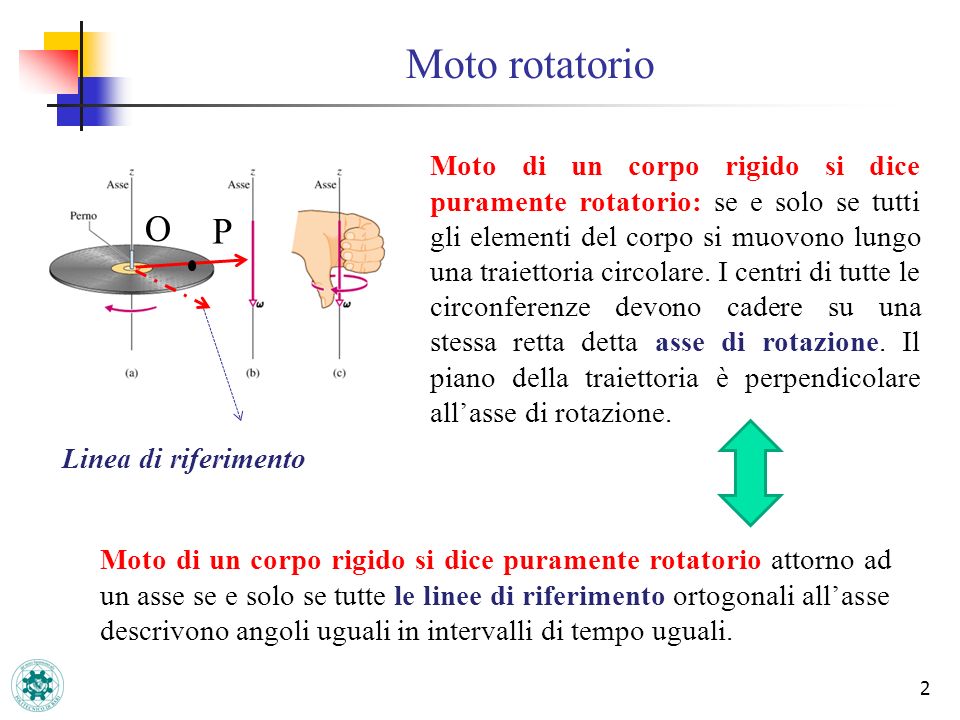
Moto rotatorio Moto di un corpo rigido si dice puramente rotatorio: se e solo se tutti gli elementi del corpo si muovono lungo una traiettoria circolare. I centri di tutte le circonferenze devono cadere su una stessa retta detta asse di rotazione. Il piano della traiettoria è perpendicolare all’asse di rotazione. O P Linea di riferimento Moto di un corpo rigido si dice puramente rotatorio attorno ad un asse se e solo se tutte le linee di riferimento ortogonali all’asse descrivono angoli uguali in intervalli di tempo uguali.
Variabili rotazionali La posizione del corpo è specificata dalla posizione di un suo elemento P. P 2D P A Moto 2D di un elemento lungo una circonferenza di raggio r (PA). Verso positivo è scelto quello antiorario rispetto al’asse z. q individua la posizione angolare della linea di riferimento 2p rad= 360° 1 rad = 57.3°
Variabili rotazionali [rad/s] In un moto puramente rotatorio di un corpo rigido: tutti i suoi elementi hanno la stessa w. Se P ha una w non costante: [rad/s2] In un moto puramente rotatorio di un corpo rigido: tutti i suoi elementi hanno la stessa a.
Variabili rotazionali vettoriali Spostamenti angolari finiti Dq non hanno natura vettoriale Spostamenti angolari infinitesime dq hanno natura vettoriale
Variabili rotazionali vettoriali Entrambi vettori w è un vettore di modulo dq/dt, direzione perpendicolare al piano della circonferenza, il verso della rotazione determina il verso in cui punta il vettore (regola della mano destra).
Rotazione con accelerazione angolare cost.
Rotazione con accelerazione angolare cost. Moto rettilineo uniformemente accelerato Moto circolare uniformemente accelerato
Relazione tra variabili lineari e angolari
Relazioni Vettoriali
Relazioni Vettoriali
Relazioni Vettoriali
Relazioni Vettoriali