Scaricare la presentazione
1
Gli azionamenti dei motori
Per azionamento si intende, in generale, un insieme di apparecchiature, gruppi convertitori, attuatori, organi di trasmissione, macchine operatrici, dispositivi di controllo.

2
azionamento la sua funzione è lo svolgimento di un certo numero di operazioni, quali cicli di lavorazione o movimenti di organi meccanici, con prestabilite leggi di moto (posizione e velocità).
.")
4
I quadranti di un azionamento motore cc
Freno meccanico/generatore elett. motore motore Freno meccanico/generatore elett.

6
Le varie fasi del movimento possono essere riassunte dallo schema seguente

7
Caratteristica del mat al variare di s

8
Per gli azionamenti di motori funzionanti in corrente alternata si avranno :
regolazione mediante reostato di avviamento e numero di poli ; regolazione tramite controllo dell’ampiezza della tensione ; regolazione tramite controllo della tensione e della frequenza.

9
Unità N° 1: Generalità sui dispositivi elettronici di potenza
I moderni sistemi di controllo e comando delle macchine elettriche impiegano diffusamente dispositivi elettronici di potenza, grazie ai quali è possibile, ad esempio automatizzare e ottimizzare la regolazione della velocità

10
I dispositivi a semiconduttore sono utilizzati come interruttori
OFF I = 0 V I ON I > 0

11
Ordine di grandezza dei parametri elettrici
Tensioni: kV Applicazioni di potenza Correnti: A - kA Potenze: kW - MW

12
Dispositivi elettronici di potenza
DIODI SCR (Raddrizzatori Controllati al Si)* SWITCH CONTROLLATI: - BJT - MOSFET - IGBT - GTO* (Gate Turn-Off) * SCR e GTO = TIRISTORI
* SWITCH CONTROLLATI: - BJT. - MOSFET. - IGBT. - GTO* (Gate Turn-Off) * SCR e GTO = TIRISTORI.")
13
IGBT Transistor IGBT (Insulated Gate Bipolar Transistor) sono transistor BJT con integrato uno stadio di comando a MOS. Sono pilotabili, quindi, in tensione. Hanno perdite di comando e frequenze operative intermedie tra MOSFET e BJT.
 sono transistor BJT con integrato uno stadio di comando a MOS. Sono pilotabili, quindi, in tensione. Hanno perdite di comando e frequenze operative intermedie tra MOSFET e BJT.")
14
IGBT

15
CONFRONTO

16
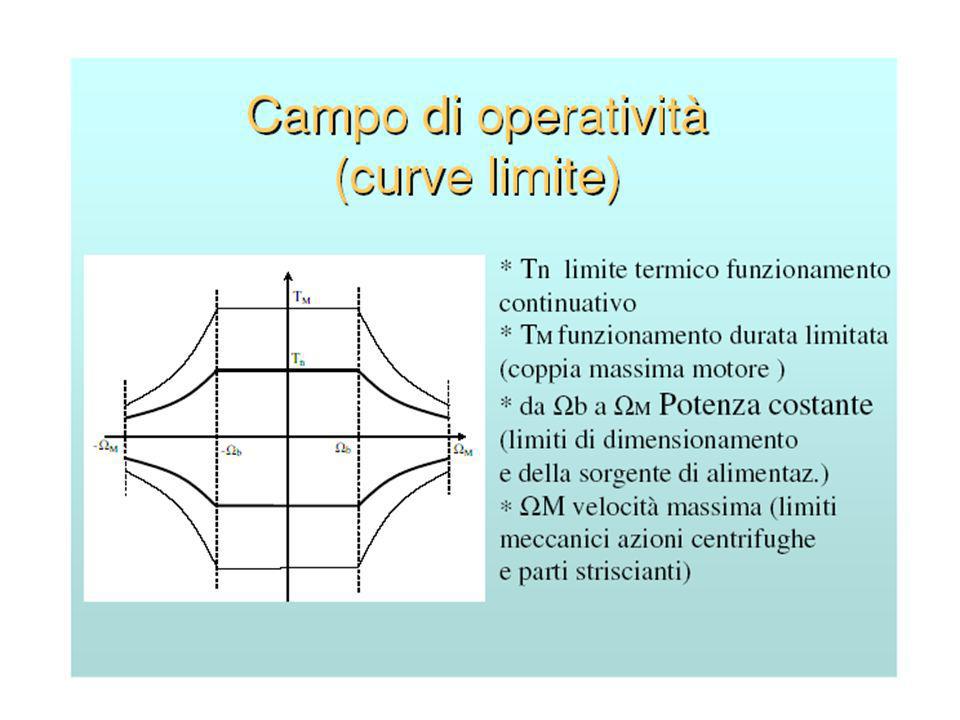
Prestazioni limite dei vari componenti
tiristori GTO MCT IGBT BJT sviluppo previsto per l’MCT MOSFET frequenza

17
Confronto tra dispositivi controllati
Proprietà relative degli switch controllati dispositivo potenza pilotabile velocità di commutazione BJT/MD MOSFET GTO IGBT MCT Media Bassa Alta

18
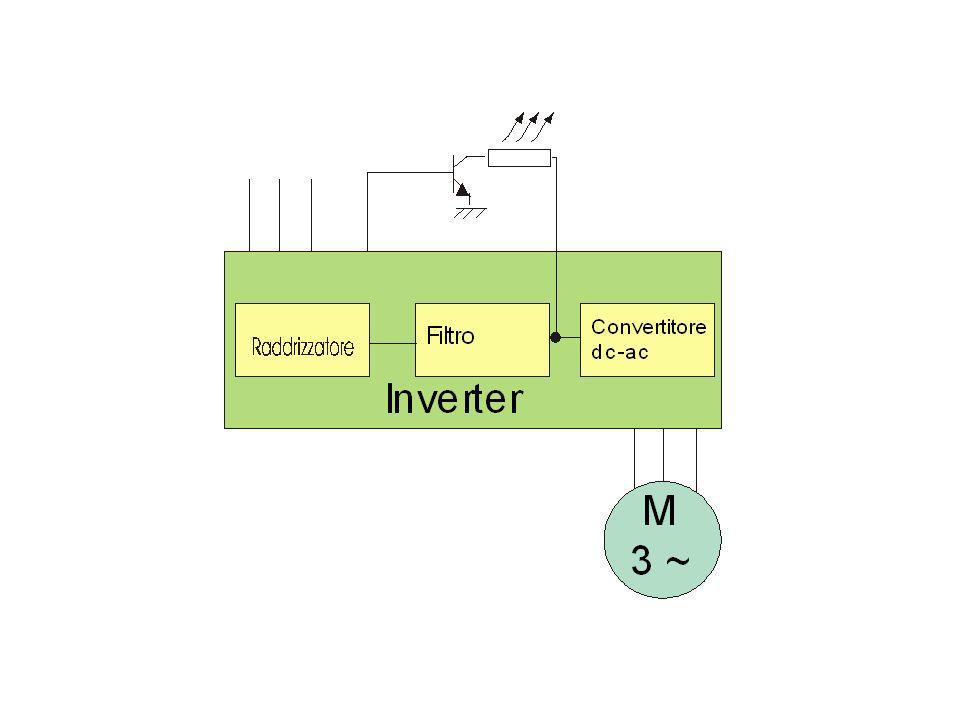
Gli inverter Gli inverter
Negli inverter si riconoscono tre parti fondamentali: il raddrizzatore detto anche convertitore CA-CC il filtro il convertitore CC-CA Scopo del raddrizzatore è di trasformare la corrente alternata monofase e trifase in c.c.. Spesso ha anche il compito di recuperare l’energia elettrica durante la fase di frenatura.

19
INVERTER

20
Schema generale di un azionamento con motore elettrico
Rete di alimentazione AC Convertitore AC/DC INVERTER MOTORE M CONTROLLO COMANDO

21
DUE CASI Rete di alimentazione in corrente continua (es. linee ferroviarie): solo INVERTERS (fig.2) Rete di alimentazione in alternata:doppia conversione per avere a monte del motore l’alternata a frequenza variabile (caso della pagina precedente - fig. 3) AC/DC DC/AC DC/AC M M Fig. 2 Fig. 3
 AC/DC. DC/AC. DC/AC. M. M. Fig. 2. Fig. 3.")
22
INVERTER

23
Raddrizzatore non controllato a ponte monofase
Raddrizzatore a ponte monofase Condensatore adeguato lato DC per filtraggio e accumulo energia

24
Analisi del raddrizzatore a ponte con induttanza non nulla lato AC
Ip.: corrente d’uscita Id costante B

25
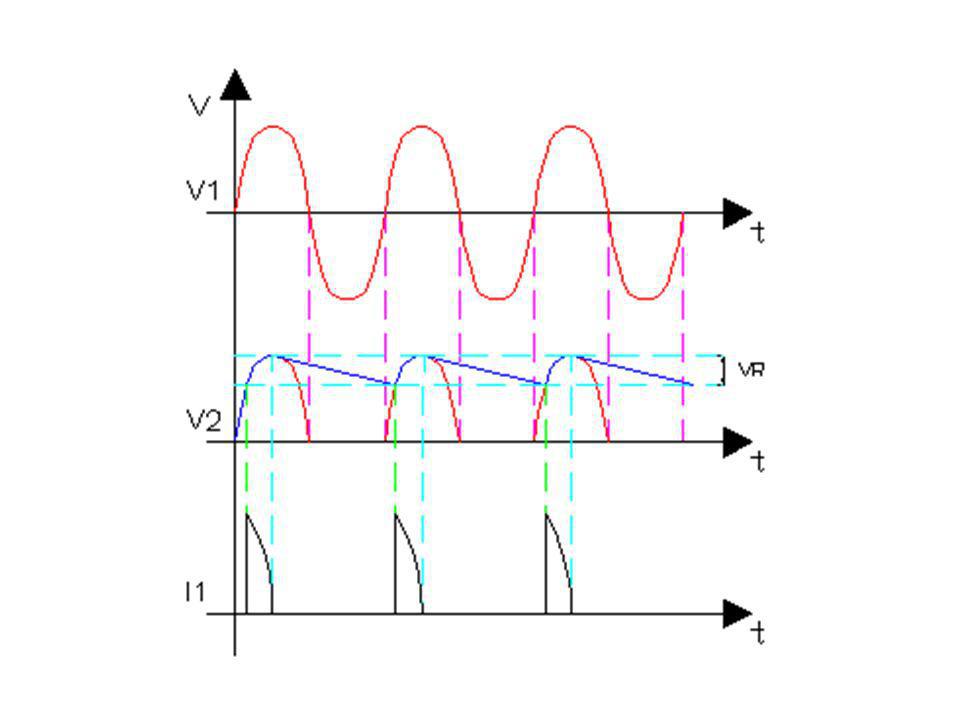
Raddrizzamento

26
FILTRAGGIO

28
CONVERTITORI AC-DC TRIFASI
L1 L2 L3 T5 T1 T3 L R E T4 T6 T2 Impulsi ai gate

29
Per capire il funzionamento, si farà il caso semplice di un convertitore a ponte di SCR, con carico resistivo Vs = Vmax sin t id T1 T2 R vd vs T3 T4

30
FUNZIONAMENTO Vs > 0: T1 e T4 sono polarizzati direttamente; si possono accendere con l’impulso di gate, mentre T3 e T4 sono polarizzati in inversa Vs < 0: è il contrario del caso sopra! vd Variando l’angolo di innesco, la Vd si modifica e varia, di conseguenza, la tensione media sul carico (<Vd>). t = = angolo di innesco Ig1 <Vd> = valor medio della Vd Ig2 <Vd> = Vmax (1+cos )/ Ig3 Ig4
. t = = angolo di innesco. Ig1. <Vd> = valor medio della Vd. Ig2. <Vd> = Vmax (1+cos )/ Ig3. Ig4.")
31
<Vd> = Vmax (1+cos )/
I valori medi dipendono da ; La conduzione è discontinua per compreso fra 0 e ; Conduzione discontinua = una coppia di SCR si spegne prima che si accende l’altra coppia di SCR.

32
Dimostrazione del valor medio

33
Principio di funzionamento di un INVERTER monofase
Vi Vi R t 1 B A 2 Vi Vu Vu Fig. 1 t T

34
SIX STEP Il six-step, viene alimentato in corrente continua mediante raddrizzatore interposto tra il dispositivo stesso e la rete. il six-step è composto da 6 contatti statici chiamati switch, a seconda dell’ordine di chiusura e della loro frequenza generano onde quadre. Ogni colonna di switch viene chiamata "gamba di inverter" A seconda della sequenza di chiusura degli switch le tensioni UA, UB, UC, localizzate rispettivamente nei punti A, B, C, si posizioneranno sul "+" o sul "-" .

35
Schema a blocchi dell’INVERTER con controllo PWM
Oscillatore Portante Alimentatore Oscillatore Modulante Vin Modulatore PWM Invertitore Vout Oscillatore modulante: fornisce al modulatore il riferimento di tensione sinusoidale con frequenza pari a quella desiderata in uscita; Portante: forma d’onda triangolare con fp >> fm; Modulatore: confronta istante per istante i valori del s.le modulante e di quello portante e invia il comando di commutazione dell’invertitore; Alimentatore: tensione costante.

36
PWM Gli inconvenienti presenti nel six-step vengono superati con gli inverter drive PWM.

37
PWM

38
PWM Schema a blocchi inverter PWM

39
CONTROLLO SCALARE DEL M.A.T.
CONTROLLO DELLA VELOVITA’ VOLT/HERTZ A CATENA CHIUSA V/Hz = il rapporto Vs/a, è costante. Dove: Vs = tensione statorica; a = pulsazione di alimentazione a Cm Accelerazione Decelerazione a

40
Regolazione motori La regolazione della velocità dei motori elettrici può essere ottenuta o impiegando motori in corrente continua regolando la tensione di armatura o di eccitazione(PWM), oppure impiegando motori in corrente alternata regolando la frequenza di alimentazione
, oppure impiegando motori in corrente alternata regolando la frequenza di alimentazione.")
41
Numero poli Esistono dei motori asincroni che , per costruzione, possono funzionare a due diverse velocità. Questi motori hanno lo statore dotato di uno speciale avvolgimento che consente di eseguire il raddoppio del numero dei poli.

42
Regolazione tramite controllo dell’ampiezza della tensione
Regolazione tramite controllo dell’ampiezza della tensione. Nel motore asincrono la coppia è legata al quadrato della tensione di alimentazione : per questo motivo la variazione della tensione modifica l’ordinata della caratteristica meccanica, ma non il suo andamento. Le variazioni di tensione non esercitano alcuna influenza sulla velocità a vuoto: le variazioni invece provocano un aumento dello scorrimento e una diminuzione della velocità quando il motore è sotto carico. Un tale sistema è quindi particolarmente adatto per ottenere delle piccole variazioni di velocità continue entro limiti dell’ordine del 10%.

43
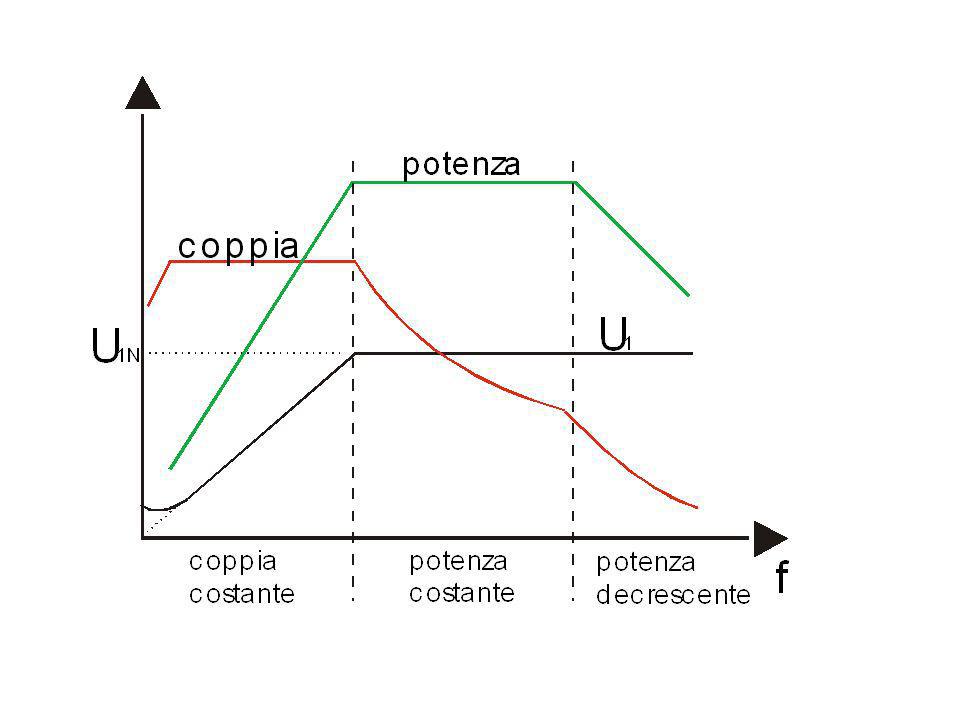
Regolazione tramite controllo della tensione e della frequenza
Regolazione tramite controllo della tensione e della frequenza. La seguente relazione n = 60f/p evidenzia la possibilità di variare la velocità agendo sulla frequenza f della tensione di alimentazione del motore. Per poter realizzare un buon azionamento occorre tener conto che : il flusso al traferro deve essere mantenuto costante al suo valore nominale per un ottimo sfruttamento della macchina che deve erogare coppia costante ; la corrente assorbita dalla macchina non deve superare il valore nominale per non incorrere a pericolosi surriscaldamenti

44
Funzionamento a coppia costante (flusso costante).
Ricordando che la coppia massima erogata dal motore è data dall’espressione : considerando che X2(1)=2L2=s1 L2=2f1sL2 esprimibile anche come
=2L2=s1 L2=2f1sL2. esprimibile anche come.")
45
inoltre, nelle condizioni di funzionamento poichè s rimane costante, tale espressione può essere ricondotta al rapporto fra tensione e frequenza, come di seguito riportato : TMax=k (U1N/f)2 dove la costante vale
2. dove la costante vale.")
48
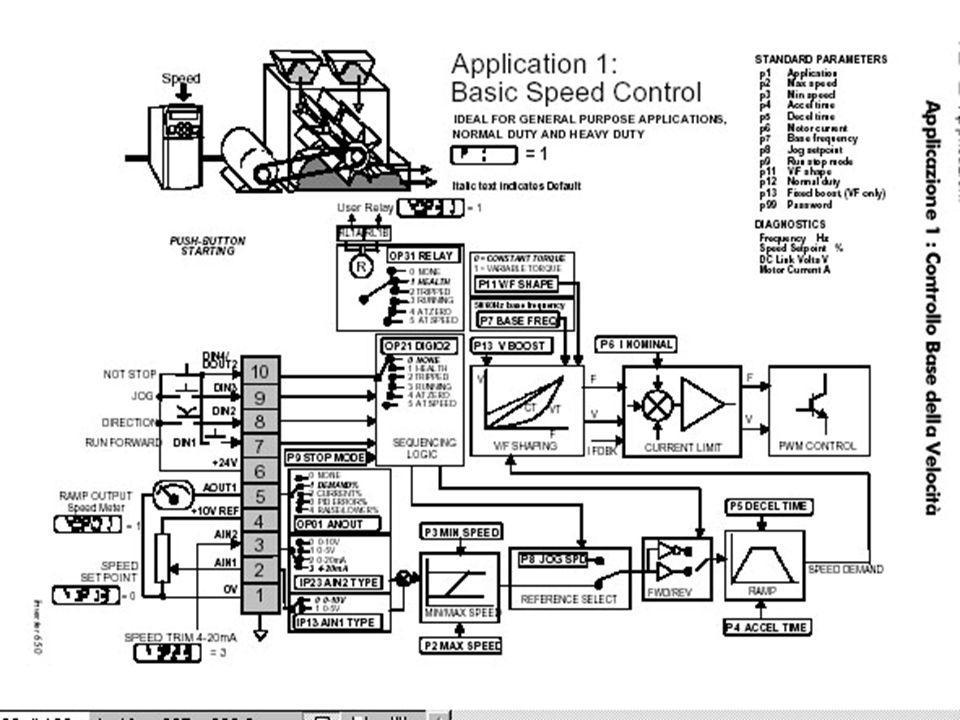
Unità N° 4 Applicazioni

49
Climatizzatori Un INVERTER difficilmente può essere immaginato come parte integrante di un climatizzatore in quanto esso è già collegato alla normale rete di distribuzione dell'energia elettrica pertanto per comprendere bene lo scopo e le funzioni dei climatizzatori inverter è bene fare una piccola precisazione: nei climatizzatori in realtà il sistema "INVERTER" è composto da due componenti: un raddrizzatore di corrente e l'inverter vero e proprio. Il raddrizzatore si occupa di trasformare la corrente alternata della rete elettrica in corrente continua che poi viene nuovamente trasformata in corrente alternata dall'inverter.

51
Paranco E’ un sistema montato su carrello scorrevole su rotaia in grado di sollevare carichi anche in modo continuativo: rotoli di carta, pezzi di utensili,…

52
Il motore di spostamento M1 deve avere:
Avvio progressivo per evitare dondolamenti del carico Avvicinamento a bassa velocità al punto di arresto Si può realizzare l’azionamento con: Un m.a.t. associato ad un Controllo Di Frequenza Regolazione velocità con rampe di accelerazione e decelerazione Gamma di velocità 1:20 2 sensi di marcia con frenatura IP55 se all’aperto Il motore di sollevamento M2 neccessita: Progressione nel sollevamento per evitare sovraccarichi Avvicinamento a bassa velocità

53
Controllo vettoriale di flusso
In un azionamento scalare non è possibile ottenere coppia nominale a bassissima velocità, vale a dire a 2 o 3Hz e in generale sono utilizzabili tra 5 e 50Hz. I motori in corrente continua consentono invece di avere coppie elevate anche a basse velocità, ciò è stato ottenuto, tramite un opportuno orientamento del collettore e spazzole in modo che le componenti di corrente che producono il flusso e la corrente attiva che produce la coppia siano sempre ortogonali. Ciò assicura che il controllo del motore in c.c. produca facilmente la coppia desiderata a qualunque velocità.

54
La presenza dello stesso collettore e delle spazzole, richiedendo una costante manutenzione, ha reso svantaggioso l’uso dei motori in corrente continua a vantaggio degli asincroni e dei brushless. Nel brushless è il sensore che rileva la posizione del rotore e consente di avere l’ortogonalità tra il flusso rotorico r e quello statorico s.

55
La risposta è stata il controllo vettoriale del flusso.
Negli azionamenti vettoriali, la scheda di pilotaggio controlla le correnti che producono il flusso e la coppia in modo da ottimizzare il funzionamento e renderlo analogo al motore in corrente continua.

56
La corrente totale (Is) è scomponibile in una componente (Id) magnetizzante o reattiva che produce il flusso e una componente (Iq) attiva che produce la coppia. La componente magnetizzante deve mantenersi costante nelle diverse condizioni di carico ( flusso costante).
.")
57
Modulazione vettoriale / orientamento di campo
Nella modulazione vettoriale viene utilizzato un modello matematico del motore. La corrente presente nello statore del motore viene misurata e viene scomposta nei vettori corrente rotore e corrente reattiva, dove • la corrente rotore genera la coppia motrice • la corrente reattiva genera il flusso della macchina

58
E’ possibile ottenere ciò in due modi
E’ possibile ottenere ciò in due modi. Il primo modo è il “Full Closed Vector Control “ L’altro sistema è ad anello aperto, è più economico e soddisfa tutte quelle richieste di azionamento che non devono essere particolarmente sofisticate. la scheda di controllo non ha il sensore “sensorless” e desume i parametri di funzionamento (velocità coppia) indirettamente tramite la corrente assorbita dal motore. Tramite un modello matematico si ricostruisce un sistema virtuale ad anello chiuso
 indirettamente tramite la corrente assorbita dal motore. Tramite un modello matematico si ricostruisce un sistema virtuale ad anello chiuso.")
59
conclusione Con l'aiuto di entrambe queste componenti della corrente, è possibile intervenire in modo indipendente sia sulla coppia, sia sul flusso magnetico, ottenendo così una regolazione molto dinamica

60
Frenatura Il termine frenatura designa gli effetti prodotti dall’energia che il motore ritorna alla scheda pilota in alcune condizioni. Una produzione di energia da parte del motore,si ha quando un carico è decelerato rapidamente o fermato, o quando in un controllo di un moto verticale, il carico è abbassato.

61
frenatura

62
frenatura E’ possibile gestire questa energia in due modi
Frenatura dinamica – probabilmente il metodo più comune di controllare la rigenerazione. Essenzialmente il metodo consiste nel predisporre un resistore che assorbe l’energia generata e la dissipa sotto forma di calore.

64
Frenatura rigenerativa
Frenatura rigenerativa. – Un raddrizzatore controllato, usato in aggiunta a quello preesistente, consente di rigenerare l’energia prodotta recuperandola nella rete principale. La tecnica rigenerativa, dati gli alti costi, è realizzata solo in appicazioni particolari. Schema di inverter rigenerativo L’azionamento funziona in tutti quadranti.

65
frenatura Frenatura con iniezione di corrente continua: si rimanda a quanto già detto sugli avviatori.








>")
>")

 in zona.>")










