Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Analisi di Immagini e Dati Biologici
Edge detection and sharpening L4-2017

2
Bordi In un'immagine grayscale gli oggetti sono distinguibili dallo sfondo o da altri oggetti perché hanno un intensità luminosa differente La linea di confine tra le due regioni di diversa intensità luminosa determina un bordo

3
Bordi Quando è determinabile il bordo di un oggetto o di una regione è determinato da due grandezze La direzione lungo la quale avviene la transizione di luminosità La grandezza della variazione luminosa nei punti che appartengono alla regione del bordo (la forza del bordo)
")
4
Bordi

5
Determinazione dei Bordi
Distribuzione delle variazioni di luminosità Variazioni localmente rilevanti (corrispondono a veri bordi) Stima della direzione della massima variazione di luminosità Limitazione dell’interferenza del rumore o dei pattern di variazione incoerenti
 Stima della direzione della massima variazione di luminosità. Limitazione dell’interferenza del rumore o dei pattern di variazione incoerenti.")
6
Bordi

7
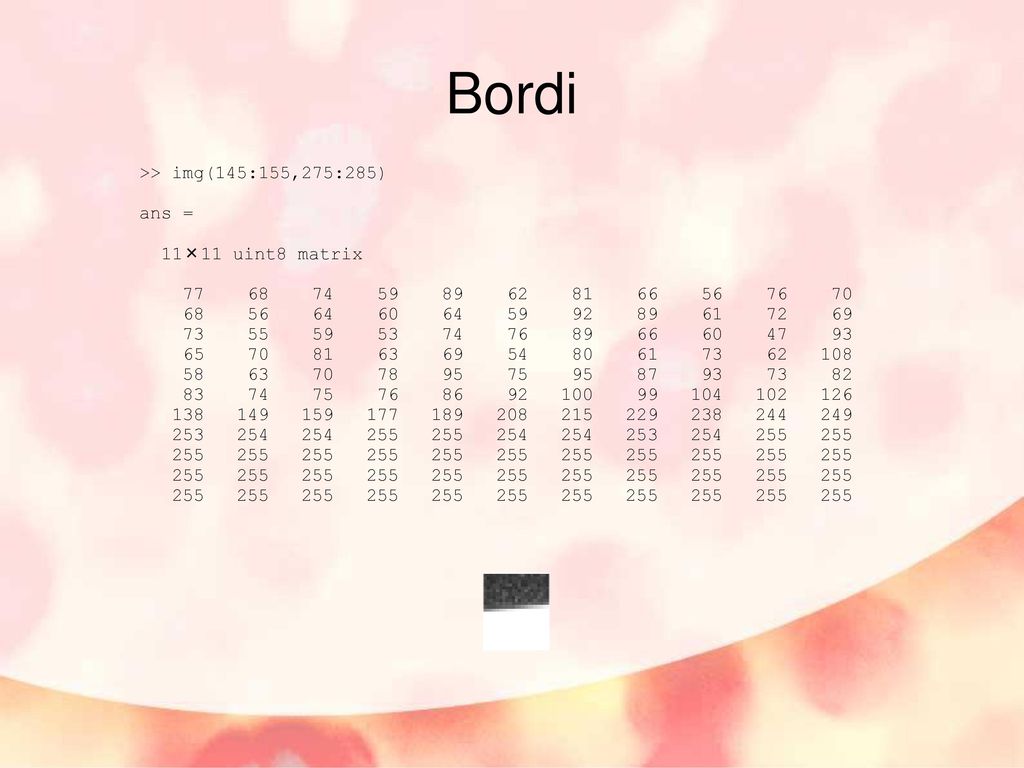
Bordi >> img(145:155,275:285) ans = 11×11 uint8 matrix
8
Bordi e Derivate Lo studio della variazione locale di una funzione porta al concetto di derivata La distribuzione dell'intensità di un immagine è discretizzata dalla matrice di pixel Approssimiamo la derivata con una differenza centrata nel punto

9
Bordi e Derivate

10
Variazioni di luminosità

11
Gradiente di luminosità
Vettore di variazione dell'intensità lungo una direzione qualsiasi Le 2 componenti del vettore sono le proiezioni lungo gli assi del vettore di massima variazione di intensità luminosa

12
Gradiente di Luminosità
Rappresenta un vettore che indica la direzione di massimo cambimento di intensità luminosa Rapidità di variazione unitaria

13
Blob luminoso Il bordo è all’interno di una regione di transizione
Definiamo il bordo sulla base della massima pendenza

14
Funzione 2D dell'immagine

15
Derivata lungo l'asse orizzontale

16
Derivata lungo l'asse verticale

17
Immagini delle Derivate
Per rappresentare come immagini le superfici delle derivate usiamo la funzione mat2gray Ricalcola la superficie in modo che I suoi valori siano tra 0 e 1

18
Immagini delle Derivate

19
Gradiente di luminosità
La forza di un bordo è data dalla magnitudine del vettore gradiente

20
Modulo del gradiente

21
Determinazione del bordo
Bordo stimato: insieme dei punti di massima pendenza Massima pendenza: punti di massimo valore del modulo del vettore gradiente

22
Gradiente di luminosità
L'orientamento è l'angolo (misurato rispetto all'asse orizzontale) della direzione di massima intensità
 della direzione di massima intensità.")
23
Gradiente di Luminosità

24
Vettori gradiente

25
Filtri di Derivazione

26
Filtro di Derivata

27
Matrici di Gradiente Matrici di Prewitt
Stimano la derivata lungo un asse eseguendo allo stesso tempo una media sull'asse ortogonale per ridurre l'influenza del rumore La funzione fspecial di Octave può generare la matrice di Prewitt orizzontale

28
Matrici di Gradiente Matrici di Sobel
Funzionano come quelle di Prewitt, ma usano una media pesata sulla dimensione ortogonale La funzione fspecial di Octave può generare la matrice di Sobel orizzontale

29
Matrice di Prewitt Derivata lungo l'asse y Derivata lungo l'asse x
Derivata lungo l'asse x

30
Matrici di Roberts Un caso semplice sono le matrici di Roberts
massimizzano le variazioni di luminosità che avvengono lungo le direzioni diagonali

31
Modulo del gradiente

32
Esempio con Octave/Matlab
imshow(imgr) figure bordo = imgr > 0.95; imshow(bordo.*ones(size(imgr)))
 figure. bordo = imgr > 0.95; imshow(bordo.*ones(size(imgr)))")
33
Funzione edge di Octave
La funzione edge ritorna un'immagine binaria dei bordi individuati con vari metodi Ammette parametri di controllo Nel caso di Sobel e Prewitt il parametro opzionale indica la soglia da applicare al modulo della derivata octave:2> borders=edge(disco,"prewitt"); octave:3> imshow(borders) octave:4> [borders,threshold]=edge(disco,”prewitt”); octave:5> borders=edge(disco,”prewitt”,1.1*threshold); octave:6> imshow(borders)
; octave:3> imshow(borders) octave:4> [borders,threshold]=edge(disco, prewitt ); octave:5> borders=edge(disco, prewitt ,1.1*threshold); octave:6> imshow(borders)")
34
Funzione edge di Octave

35
Confronto di Metodi (Octave)
Sobel Prewitt

36
Confronto di metodi (octave)
Roberts Canny

37
Matrici di Gradiente

38
Compass Operators Matrici che massimizzano il modulo del gradiente all'interno di un quadrante Le 8 matrici del metodo sono state ideate in modo generare un vettore gradiente con modulo che diventa massimo quando la variazione di intensità in un punto avviene in uno di otto quadranti in cui l'angolo giro è suddiviso Di 8 matrici devono essere calcolati solo 4 gradienti (essendo il modulo degli altri quadranti uguale, ma cambiando il verso del vettore gradiente)
")
39
Compass Operator

40
Operatori basati sulla derivata seconda

41
Laplacian of Gaussian (GoL)
Modello bordo con andamento 'smooth' può essere assimilato ad una funzione sigmoidale Si assume che il bordo sia dove la funzione pendenza cambia di concavità. Si cerca quindi i punti dove la derivata seconda cambia di segno (quindi dove in qualche punto attraversa lo zero)
")
42
Laplacian of Gaussian (GoL)
")
43
Laplacian of Gaussian (GoL)
Immagine di cellule osservate con microscopia ottica

44
Laplacian of Gaussian (GoL)
LoG 5x5,9x9 Dispersione 1.5

45
Laplacian of Gaussian (GoL)
Implementato nella funzione edge Ammette 2 parametri di controllo: soglia e dispersione della gaussiana

46
Metodo di Canny Metodo analitico basato sull'ipotesi di modello gaussiano del rumore Minimizza l'errore di localizzazione del bordo Minimizza i falsi positivi Minima ridondanza della localizzazione Implementato da edge

47
Metodo di Canny Octave offre un'implementazione del Metodo di Canny

48
Metodo di Canny

49
Edge Sharpening

50
Edge Sharpening Il riconoscimento dei contorni permette di costruire immagini binarie di regioni di un immagine L'organizzazione dei contorni favorisce la percezione delle strutture La forza di un bordo è il fattore determinante per suo riconoscimento L'edge sharpening mira al miglioramento della forza dei bordi e dei contorni

51
Edge Sharpening Strategia: aumentare le differenze di intensità dove ci sono bordi All'immagine da migliorare viene sottratta una quota (controllata da un parametro)
")
52
Edge Sharpening

53
Edge Sharpening Operatore di Laplace

54
Edge Sharpening Operatore di Laplace in forma discreta

55
Edge Sharpening

56
Operatore di Laplace Applicazione dell'operatore di Laplace per esaltazione dei bordi ('*' è l'operatore di convoluzione implementato dalla funzione imfilter di Octave

57
Unsharp Masking L'unsharp masking viene costruito in 2 fasi
Si crea una immagine smoothed che viene sottratta all'immagine originale. Questo costituisci la 'maschera' (mask) La maschera viene di nuovo aggiunta all'originale usando un parametro di controllo
 La maschera viene di nuovo aggiunta all originale usando un parametro di controllo.")
58
Unsharp Masking

59
Unsharp Masking Maschera ottenuta sottraendo l’immagine filtrata con un filtro gaussiano di dimensione 31 e dispersione 6

Presentazioni simili

 A. A. 99/00 B>")


 delle immagini>")











 · B(x) > 0 è soddisfatta dai valori di per i quali i due fattori A(x) e B(x) hanno.>")


