Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
POPOLAZIONI INTERAGENTI
In natura nessuna popolazione è isolata. Nel caso di due specie che condividono un ecosistema si può avere: Competizione -Mutualismo

2
Predazione-parassitismo

3
In assenza di predatori:
Popolazione delle prede Popolazione dei predatori In assenza di predatori: le prede aumentano in modo proporzionale (ipotesi del modello) tasso di accrescimento
 tasso di accrescimento.")
4
Introduciamo l’interazione tra le specie
In assenza di prede: I predatori diminuiscono (muoiono di fame) in modo proporzionale Tasso di mortalità Introduciamo l’interazione tra le specie
 in modo proporzionale. Tasso di mortalità. Introduciamo l’interazione tra le specie.")
5
matematico italiano (1860-1940)
MODELLO DI LOTKA-VOLTERRA Vito Volterra matematico italiano ( ) Alfred James Lotka demografo americano ( ) interazione
 Alfred James Lotka. demografo americano. ( ) interazione.")
6
La velocità di collisioni molecolari di due specie chimiche
La forma del termine di interazione segue la nota legge di massa azione della chimica: La velocità di collisioni molecolari di due specie chimiche in una soluzione è proporzionale al prodotto delle due concentrazioni Interazione delle prede con i predatori: proporzionale a p (tasso di mortalità) proporzionale a q (incontri) coefficiente di predazione per le prede
 proporzionale a q (incontri) coefficiente di predazione per le prede.")
7
Interazione dei predatori con le prede:
proporzionale al numero di prede (incontri-cibo) proporzionale al numero di predatori coefficiente di predazione dei predatori efficienza di predazione
 proporzionale al numero di predatori. coefficiente di predazione dei predatori. efficienza di predazione.")
8
Quesiti Equazioni di Lotka-Volterra Sistema differenziale del I ordine
Cosa cambia rispetto i modelli precedenti ad 1 popolazione Come si comportano le due popolazioni a ”lungo andare” Le popolazioni raggiungono un equilibrio? E’ reale il rischio di estinzione delle prede?

9
DI SISTEMI DIFFERENZIALI DEL I ORDINE
STABILITA’ DI SISTEMI DIFFERENZIALI DEL I ORDINE t fissato: la coppia (x(t), y(t) ) può essere vista come un punto di coordinate (x,y) oppure come il vettore posizione x(t)=[ x(t), y(t)] x(t)=[ x(t), y(t)] Al variare di t il punto (x(t), y(t) ) descrive una traettoria che rappresenta graficamente la soluzione del sistema di equazioni
, y(t) ) può essere vista come un punto di coordinate (x,y) oppure come il vettore posizione x(t)=[ x(t), y(t)] x(t)=[ x(t), y(t)] Al variare di t. il punto (x(t), y(t) ) descrive una traettoria che rappresenta graficamente la soluzione del sistema di equazioni.")
10
Piano delle fasi Vettore velocità E’ l’insieme delle direzioni:
Il vettore rappresenta la variazione istantanea in x e in y è chiamato vettore velocità tangente alla curva soluzione Piano delle fasi E’ l’insieme delle direzioni:

11
In tali punti le variazioni delle funzioni x(t) e y(t) risultano nulle
Esempio di spazio delle fasi Nel piano delle fasi è importante stabilire la posizione dei punti (x, y) in cui il vettore è nullo. In tali punti le variazioni delle funzioni x(t) e y(t) risultano nulle Sono pertanto i punti stazionari o punti di equilibrio
 in cui il vettore è nullo. In tali punti le variazioni delle funzioni x(t) e y(t) risultano nulle. Sono pertanto i punti stazionari o punti di equilibrio.")
12
I punti stazionari sono l’intersezione dell’insieme di
Nei punti in cui il vettore risulta: I punti stazionari sono l’intersezione dell’insieme di punti in cui (x nullcline) con l’insieme di punti in cui (y nullcline)
 con l’insieme di punti in. cui (y nullcline)")
13
Nei punti in cui il vettore direzionale è parallelo all’asse y
x nullcline Nei punti in cui il vettore direzionale è parallelo all’asse x y nullcline

14
del modello Lotka-Volterra
Stati di equilibrio e diagramma delle fasi del modello Lotka-Volterra Equilibrio: le popolazioni non cambiano derivate nulle

15
P2 P1 Per il significato biologico ha interesse solo il quadrante Le rette e sono le due nullcline

16
IV I P2 II III P1 zona f1 f2 I < 0 II > 0 III IV

17
IV I P2 II III P1 In assenza di prede (x=0) il punto P1 è attrattivo: estinzione (I predatori sopravvivono solo se ci sono le prede) P1 invece è repulsivo per le prede in assenza di predatori (y=0) (le prede aumentano se non ci sono i predatori)
 (le prede aumentano se non ci sono i predatori)")
18
Il Punto P2: OSSERVAZIONI
Il livello di equilibrio della popolazione x (prede) è e quindi non dipende dai parametri della popolazione x , ma dipende dai parametri associati ai predatori. Affinchè le prede siano stazionarie, ( ) debbono crescere in modo che il tasso di predazione dei predatori si mantenga uguale al tasso di mortalità dei predatori D Il livello di equilibrio della popolazione y (predatori) è e quindi non dipende dai parametri della popolazione y, ma dipende dai parametri associati alle prede Affinchè i predatori si mantengano stazionari, ( ) il tasso di mortalità dovuto alla predazione deve mantenersi uguale al tasso di accrescimento A delle prede
 è e quindi non dipende dai parametri della popolazione x , ma dipende dai parametri associati ai predatori. Affinchè le prede siano stazionarie, ( ) debbono crescere in modo che il tasso di predazione dei predatori. si mantenga uguale al tasso di mortalità dei predatori D. Il livello di equilibrio della popolazione y (predatori) è e quindi non dipende dai parametri della popolazione y, ma dipende dai parametri associati alle prede. Affinchè i predatori si mantengano stazionari, ( ) il tasso di mortalità dovuto alla predazione deve mantenersi. uguale al tasso di accrescimento A delle prede.")
19
Attorno a P2 le traettorie hanno un comportamento ciclico:
IV I P2 II III P1 Attorno a P2 le traettorie hanno un comportamento ciclico: ad un aumento delle prede segue un aumento dei predatori, che a sua volta provoca una diminuizione delle prede, seguita da una diminuizione dei predatori e così via …

20
Esiste un equilibrio “precario”
tra le forze che portano ad oscillazioni che aumentano e le forze che portano ad oscillazioni che diminuiscono Piccoli cambiamenti nel sistema possono rompere tale equilibrio Centro neutrale strutturalmente instabile

21
Caso generale Spirale stabile Si possono avere diverse situazioni
Le traettorie potrebbero convergere a P2 seguendo delle spirali Spirale stabile

22
Centro neutrale Oppure le traettorie potrebbero descrivere delle curve
di forma ellittica attorno al punto P2 Centro neutrale

23
Spirale instabile Oppure le traettorie potrebbero allontanarsi da P2,
seguendo delle spirali Spirale instabile

24
Il modello di Lotka –Volterra non è ecologicamente stabile
Si può dimostrare che il punto P2 del modello di Lotka-Volterra è un centro neutrale Le soluzioni x e y girano attorno al punto P2. Il punto stazionario non è attrattivo, cioè non è asintoticamente stabile Inoltre: se la soluzione è perturbata a partire da una determinata orbita, essa non torna all’orbita iniziale, ma piuttosto segue una nuova orbita.

25
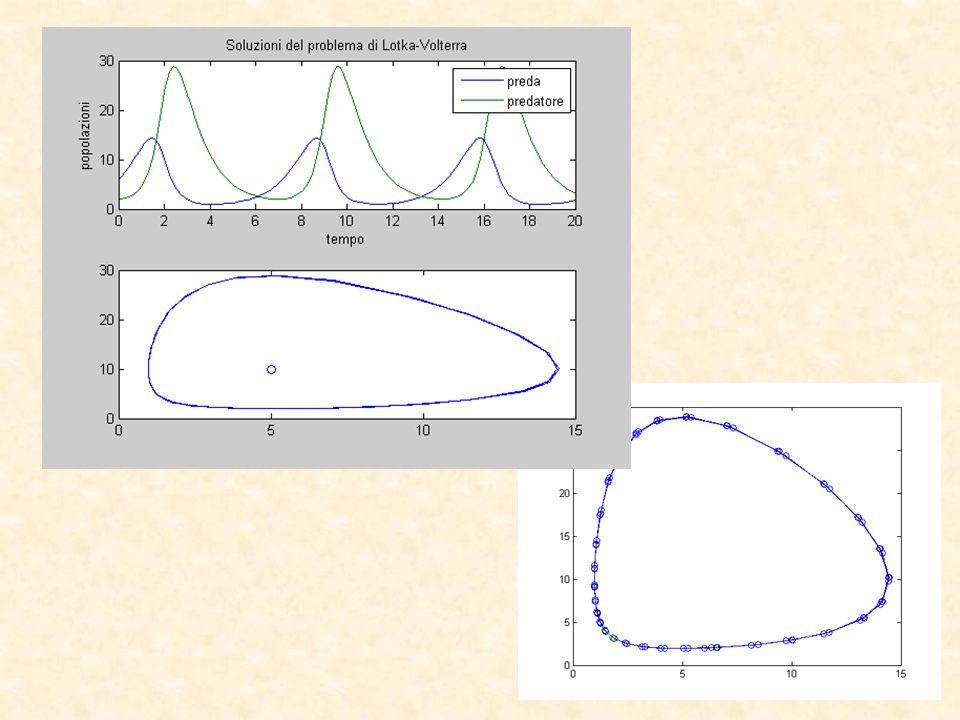
Dinamica e piano delle fasi
di due popolazioni di tonni e squali

26
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Problema preda-predatore % Modello di Lotka-Volterra % % X'(t) = A X(t) - alpha X(t)Y(t) % Y'(t) = - D Y(t) + Beta X(t)Y(t) % X(0) = x0 Y(0) = y0 % A tasso di crescita della preda % alpha coefficiente di predazione della preda % D tasso di mortalità dei predatori % Beta coefficiente di predazione del predatore clear all global A alpha D Beta A =1;alpha=0.1;D=1;Beta=0.2; %Alpha=1;Beta=0.2;Gamma=1;Delta=0.1; t0=0; tf=20; tspan=[t0,tf]; y0=[6 2]'; h= 0.01;
 = A X(t) - alpha X(t)Y(t) % Y (t) = - D Y(t) + Beta X(t)Y(t) % X(0) = x0 Y(0) = y0. % A tasso di crescita della preda. % alpha coefficiente di predazione della preda. % D tasso di mortalità dei predatori. % Beta coefficiente di predazione del predatore. clear all. global A alpha D Beta. A =1;alpha=0.1;D=1;Beta=0.2; %Alpha=1;Beta=0.2;Gamma=1;Delta=0.1; t0=0; tf=20; tspan=[t0,tf]; y0=[6 2] ; h= 0.01;")
27
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Risoluzione del sistema % di equazioni differenziali %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% options = [t,y] = tspan, y0,options); figure(2) subplot(2,1,1),plot(t,y) title('Soluzioni del problema di Lotka-Volterra') xlabel('tempo'); ylabel('popolazioni') legend('preda','predatore') subplot(2,1,2), plot(y(:,1),y(:,2),'b',D/Beta,A/alpha,'o') function F=fvolt(t,z) global A alpha D Beta F=[A*z(1) - alpha*z(2)*z(1); -D*z(2) + Beta*z(1)*z(2)]; return
; figure(2) subplot(2,1,1),plot(t,y) title( Soluzioni del problema di Lotka-Volterra ) xlabel( tempo ); ylabel( popolazioni ) legend( preda , predatore ) subplot(2,1,2), plot(y(:,1),y(:,2), b ,D/Beta,A/alpha, o ) function F=fvolt(t,z) global A alpha D Beta. F=[A*z(1) - alpha*z(2)*z(1); -D*z(2) + Beta*z(1)*z(2)]; return.")
Presentazioni simili