Scaricare la presentazione
1
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Facoltà di Ingegneria – Università degli studi di Siena Controllo remoto di un robot mobile realizzato con Lego Mindstorms Relatore: Prof. Domenico Prattichizzo Correlatori : Prof. Antonio Vicino Dott. Marco Casini Tesi di Laurea di: Fabio Carusi

2
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Obiettivo della tesi: Progettazione ed implementazione di una applicazione Hardware-Software per la realizzazione di esperimenti remoti di robotica mobile. Robot mobile realizzato con Lego Mindstorms Applicazione integrata nell’Automatic Control Telelab (ACT)
")
3
ACT – Automatic Control Telelab
Controllo remoto di un robot mobile realizzato con Lego Mindstorms ACT – Automatic Control Telelab

4
“Automatic Control Telelab” (ACT)
Controllo remoto di un robot mobile realizzato con Lego Mindstorms “Automatic Control Telelab” (ACT) L’Automatic Control Telelab (ACT) è un laboratorio remoto sviluppato presso il Dipartimento di Ingegneria dell’Informazione dell’Università degli Studi di Siena con lo scopo principale di creare un ambiente didattico che permetta agli studenti di interagire con processi fisici attraverso la rete Internet Principali caratteristiche dell’ACT: Possibilità di realizzare esperimenti remoti di complessità e di tipo diversi su vari processi fisici reali. Compatibilità con qualsiasi calcolatore/browser web senza necessità di installare software aggiuntivo. Interfaccia grafica user-friendly ma allo stesso tempo completa e potente. Accessibilità in qualsiasi momento da qualunque calcolatore connesso alla rete Internet. Interazione basata su Matlab/Simulink
 L’Automatic Control Telelab (ACT) è un laboratorio remoto sviluppato presso il Dipartimento di Ingegneria dell’Informazione dell’Università degli Studi di Siena con lo scopo principale di creare un ambiente didattico che permetta agli studenti di interagire con processi fisici attraverso la rete Internet. Principali caratteristiche dell’ACT: Possibilità di realizzare esperimenti remoti di complessità e di tipo diversi su vari processi fisici reali. Compatibilità con qualsiasi calcolatore/browser web senza necessità di installare software aggiuntivo. Interfaccia grafica user-friendly ma allo stesso tempo completa e potente. Accessibilità in qualsiasi momento da qualunque calcolatore connesso alla rete Internet. Interazione basata su Matlab/Simulink.")
5
Controllo remoto di un robot mobile realizzato con Lego Mindstorms

6
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Mindstorms è una linea di prodotti che il gruppo Lego ha introdotto a partire dalla fine del 1998. E’ una estensione della serie Lego Technic con elementi nuovi (RCX, sensori, attuatori) indirizzata alla realizzazione di piccoli robot autonomi. RCX Blocco programmabile da PC dotato di: tre porte d’ingresso (1,2,3); tre porte d’uscita (A,B,C); una porta ad infrarossi; un display; quattro pulsanti; un generatore di suoni; L’RCX è alimentato con 6 batterie tipo AA che servono anche ad alimentare i dispositivi collegati.
 indirizzata alla realizzazione di piccoli robot autonomi. RCX. Blocco programmabile da PC dotato di: tre porte d’ingresso (1,2,3); tre porte d’uscita (A,B,C); una porta ad infrarossi; un display; quattro pulsanti; un generatore di suoni; L’RCX è alimentato con 6 batterie tipo AA che servono anche ad alimentare i dispositivi collegati.")
7
Realizzazione dell’applicazione
Controllo remoto di un robot mobile realizzato con Lego Mindstorms Realizzazione dell’applicazione

8
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Software di Comunicazione: S-Function RCX_Device Programma C mediante il quale vengono comandate le uscite e letti gli ingressi dell’RCX in ambiente Simulink. Robot Mobile Il robot è un veicolo a due cingoli realizzato intorno all’RCX. I due cingoli sono comandati da due motori Lego la cui velocità viene ridotta da un sistema di ingranaggi.

9
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Il sistema di rilevamento Una telecamera posta a 3 metri sopra il pavimento acquisisce a intervalli regolari immagini dell’area di lavoro (320 x 240 centimetri). Le immagini vengono filtrate in modo da evidenziare i pixel più luminosi prodotti dalle tre lampadine poste sulla parte superiore del robot Un apposito algoritmo calcola posizione ed orientamento del robot
. Le immagini vengono filtrate in modo da evidenziare i pixel più luminosi prodotti dalle tre lampadine poste sulla parte superiore del robot. Un apposito algoritmo calcola posizione ed orientamento del robot.")
10
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Sistema di Ricarica Uso di batterie ricaricabili alcaline per alimentare l’RCX. Circuito per la ricarica posto sul robot. Contatti stricianti per fornire l’alimentazione necessaria. Box di ricarica in cui il robot viene guidato da un’apposita procedura software al termine di ogni esperimento.

11
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Sicurezza L’esperimento viene interrotto in due casi: Quando il robot esce da un’area di 280 x 200 centimetri (per evitare che esca dall’area di copertura del sistema di rilevamento). Quando viene superato il tempo massimo assegnato (per evitare la monopolizzazione del processo). Video on-line Per fornire un convincente “effetto presenza” sono state installate 4 webcam che forniscono diverse visuali dell’area dell’esperimento.
. Quando viene superato il tempo massimo assegnato (per evitare la monopolizzazione del processo). Video on-line. Per fornire un convincente effetto presenza sono state installate 4 webcam che forniscono diverse visuali dell’area dell’esperimento.")
12
Analisi e sintesi di un controllore
Controllo remoto di un robot mobile realizzato con Lego Mindstorms Analisi e sintesi di un controllore

13
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Modello teorico (veicolo a due cingoli) posizione ed orientamento del robot velocità dei due cingoli distanza fra i due cingoli
 posizione ed orientamento del robot. velocità dei due cingoli. distanza fra i due cingoli.")
14
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Un modello che rispecchia il comportamento del robot in modo più realistico è stato stimato con tecniche di identificazione Dove F( ) indica la caratteristica dei motori riportata in figura
 indica la caratteristica dei motori riportata in figura.")
15
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
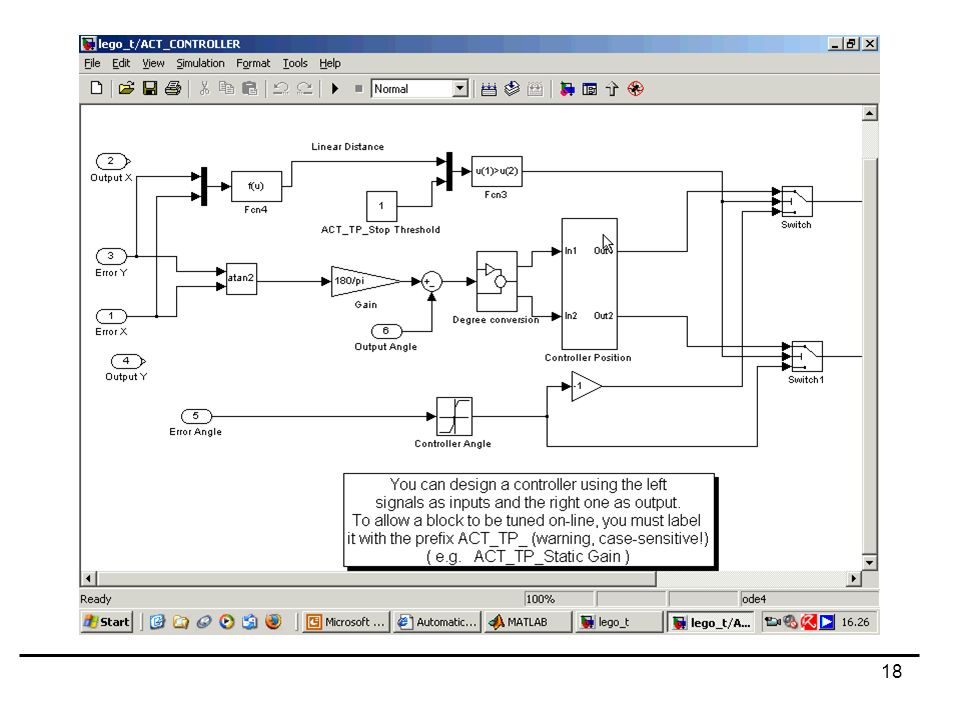
Sintesi del controllore Il controllore realizzato si articola in due distinte fasi. X Y Error_X Error_Y Posizione riferimento Distanza Angolare Robot Fase 1 (posizione): I cingoli vengono azionati con velocità diverse In base alla distanza angolare dal target. In questo modo il robot procede con traiettoria curva verso la posizione di riferimento. Fase 2 (orientamento): Si attiva quando l’errore di posizione scende sotto una certa soglia. I cingoli vengono azionati in modo da far ruotare il robot su se stesso.
: I cingoli vengono azionati con velocità diverse In base alla distanza angolare dal target. In questo modo il robot procede con traiettoria curva verso la posizione di riferimento. Fase 2 (orientamento): Si attiva quando l’errore di posizione scende sotto una certa soglia. I cingoli vengono azionati in modo da far ruotare il robot su se stesso.")
16
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
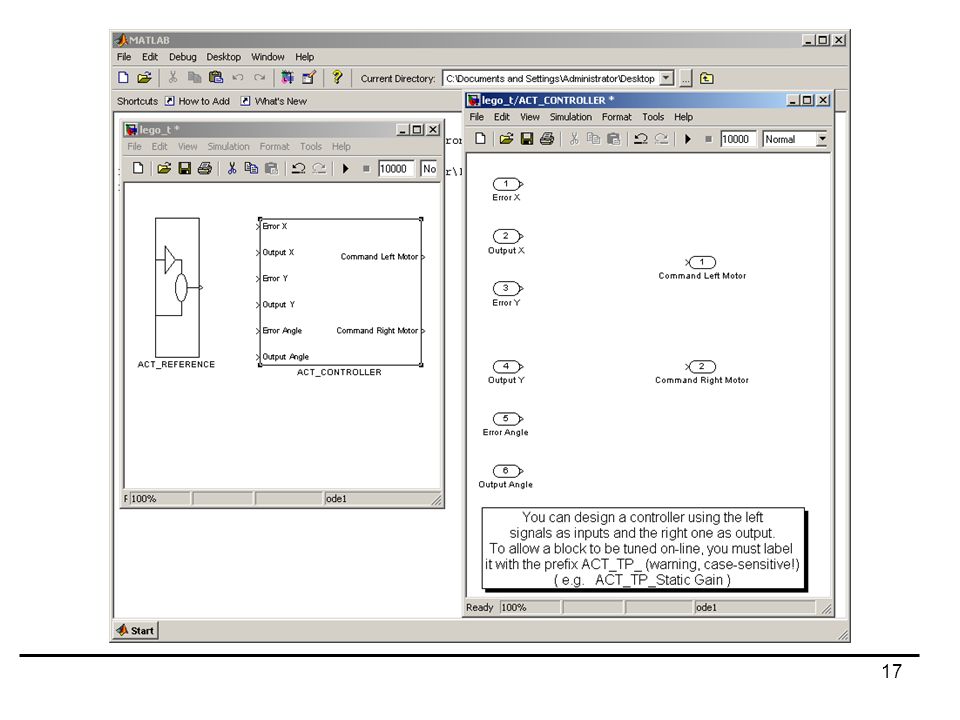
Un esempio di sessione

19
Controllo remoto di un robot mobile realizzato con Lego Mindstorms
Sviluppi futuri Esperimenti remoti di path-planning Modalità Competizione di studenti Esperimenti basati su più robot




>")
















