Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
An Efficient Extension of Elevation Maps for Outdoor Terrain Mapping Patrick Pfaff and Wolfram Burgard Pier Francesco Palamara Corso di Visione e Percezione:

2
Dominio Navigazione di un sistema robotico autonomo in ambiente reale: –Environment modelling (perception) Numeric Level Numeric Level Symbolic Level Symbolic Level –Path Planning (Behaviour Control) Casi Casi – terreno facile, terreno difficile, … Soluzioni –Grafi, Potential Fields, …
 Numeric Level Numeric Level Symbolic Level Symbolic Level –Path Planning (Behaviour Control) Casi Casi – terreno facile, terreno difficile, … Soluzioni –Grafi, Potential Fields, …")
3
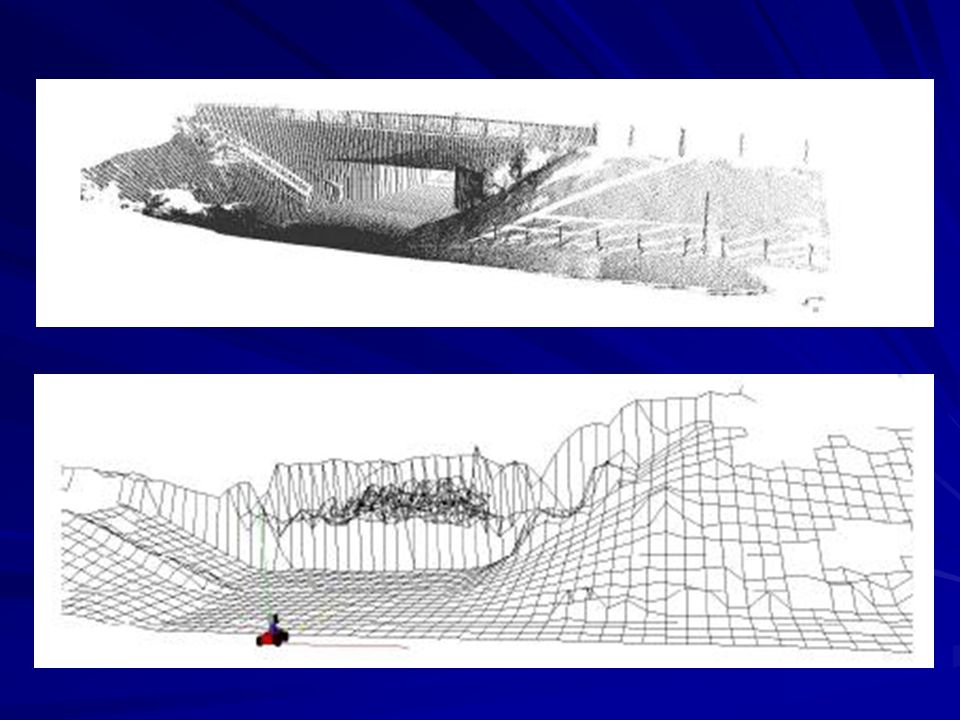
Strutture Dati Mappa che contenga informazione sullaltezza dellambiente Topological Maps – Poche informazioni geometriche Full 3D Maps – Costi computazionali Elevation Maps – OK! Caratteristiche: –Griglia discreta di dimensione

4
Elevation Maps Percezione rumorosa: Kalman Filter –Aggiornamento della media: –Aggiornamento della Deviazione Standard: Problemi –Semantico: Gli oggetti appesi sono classificati come ostacoli –Computazionale: Il matching (ICP) da punti di vista differenti e costoso e non converge
 da punti di vista differenti e costoso e non converge")
5
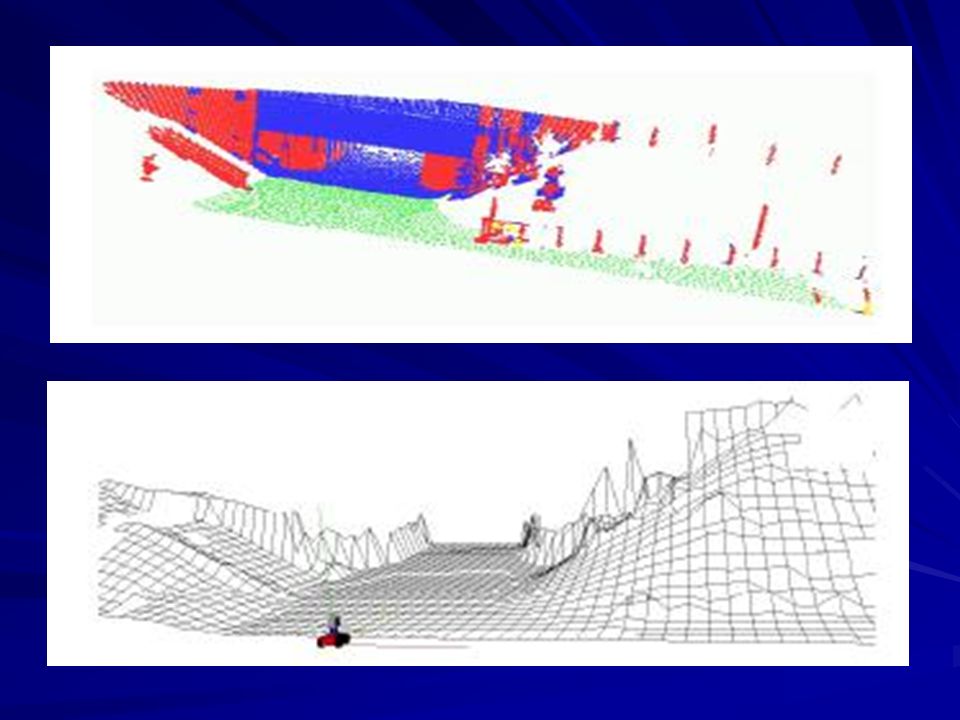
Classificazione I punti vengono classificati in base alla deviazione standard in: –Vertical objects –Vertical Gaps –Edge cells (from above) –Traversable cells
 –Traversable cells")
8
Mappa globale Viene utilizzato un variazione di ICP (Besl – McKay – IEEE 1992) per il merging –ICP –Con classificazione –dove
 per il merging –ICP –Con classificazione –dove")
9
Risultato

10
Conclusione Mapping dipendente da ambiente –Semantica nelle mappe –Estrazione features –Filtraggio –Ottimizzazione (es. modifica di ICP) Rilevamento dinamico classi di ambiente –Cosa mi aspetto di dover considerare –Costi e prestazioni scalabili
 Rilevamento dinamico classi di ambiente –Cosa mi aspetto di dover considerare –Costi e prestazioni scalabili.")
11
Software Moduli software di grandi architetture per robot mobili Implementazione in matlab dellelevation map

12
Resources An Efficient Extension of Elevation Maps for Outdoor Terrain Mapping - Patrick Pfaff and Wolfram Burgard a Method for Registration of 3D Shapes - PJ Besl, ND McKay - IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992. High Resolution terrain map from multiple senson data - In So Kweon, Takeo Kanade - IEEE Transaction on Pattern Analisys and Machine Intelligence, VOL 14, N. 2, February 1992 Sélection et contrôle de modes de déplacement pour un robot mobile autonome en environnements naturels - T. Peynot - LAAS-CNRS Autonomous Rover Navigation on Unknown Terrains Functions and Integration - Simon Lacroix, Anthony Mallet, David Bonnafous Grard Bauzil, Sara Fleury, Matthieu Herrb, and Raja Chatila - LAAS/CNRS The autonomous blimp project of LAAS/CNRS Current status and research challenges - Simon Lacroix Il-Kyun Jung Philippe Soueres Emmanuel Hygounenc Jean-Paul Berry - LAAS/CNRS On the ICP algorithm - Esther Ezra, Micha Sharir, Alon Efrat 3-D Modelling and Robot Localization from Visual and Range Data in Natural Scenes Carlos Parra, Rafael Murrieta-Cid, Michel Devy, Maurice Briot - LAAS-CNRS

Presentazioni simili

>")







>")




 2l2 nel canale di decadimento WW (*) 2l2 Dati Spring07 CMSSW_1_3_x 100 pb -1 (47 pagine)>")




