Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Locomozione Riflessi neo-natali dello stepping
Sistema meccanico bipede Controllo motorio+meccanica Il ruolo di g (gravità) Il ruolo di COM (centro di massa) EP (energia potenziale), EC (energia cinetica) Rapporti scalati
 Il ruolo di COM (centro di massa) EP (energia potenziale), EC (energia cinetica) Rapporti scalati.")
2
Lo stepping dei bimbi Riflesso di stepping (Thelen)
Dopo 4 mesi di vita scompare… …Ma se messi nell’acqua ricompare ? Perché? Il peso del corpo è la causa della sua “scomparsa” Importanti conseguenze teoriche sullo sviluppo motorio infantile e sul controllo motorio Riflessi formano la base della costruzione dei movimenti

3
La meccanica La meccanica bipede Analisi del movimento:
su di un piano sta in piedi Su un piano inclinato cammina Analisi del movimento: 1 step: osserviamo il movimento 2 step: definiamo le variabili importanti

4
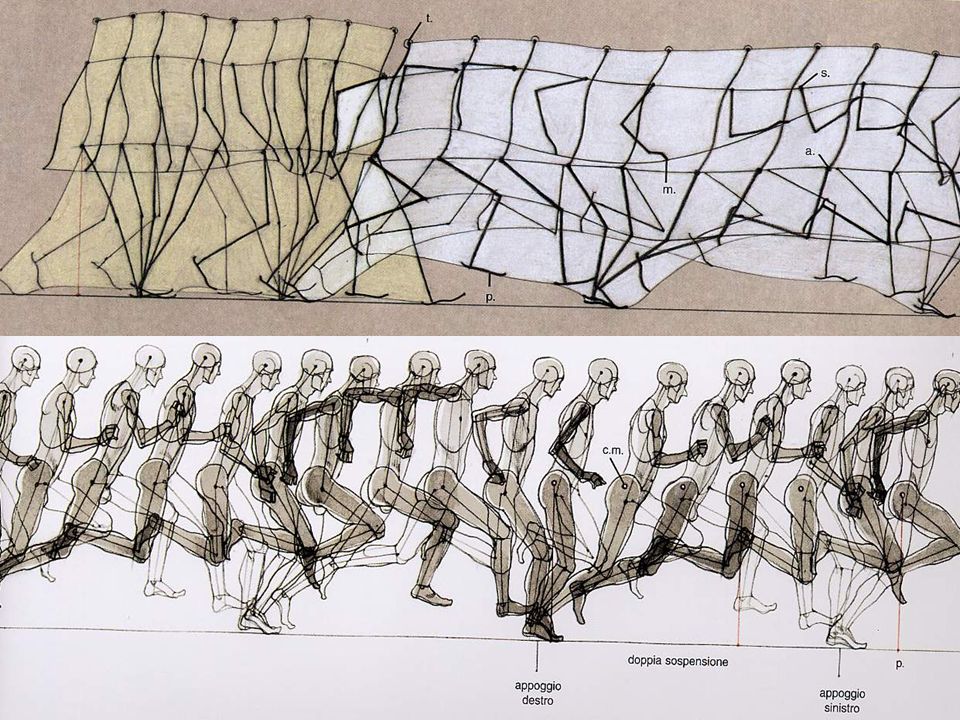
La camminata di Muybridge

5
La cinematica della camminata

6
La testa si alza e si abbassa di circa 40 mm

7
Camminata descrizione
Alziamo e abbassiamo la testa di 40 mm Questo pattern ha una relazione fra altezza e velocità: Quando il piede spinge avanti-basso il corpo viene decelerato (circa 1.4m/s) Quando il piede spinge dietro basso viene accelerato (circa 1.7m/s) Tutte le volte che il corpo sale aumenta Ep Tutte le volte che il corpo scende aumenta Ec
 Quando il piede spinge dietro basso viene accelerato (circa 1.7m/s) Tutte le volte che il corpo sale aumenta Ep. Tutte le volte che il corpo scende aumenta Ec.")
8
La camminata è un pendolo invertito
Il pendolo trasforma costantemente Ec in Ep Quando il pendolo è alto: Grande Ep movimento lento Quando il pendolo è basso: Grande Ec movimento veloce

9
Definizioni Ec Ep Energia cinetica: Energia potenziale:
Un corpo in movimento è in grado di compiere lavoro per effetto della velocità posseduta Es: il vento sbattendo sulle pale di un mulino perde la sua velocità e quindi perde energia cinetica la quale viene convertita per far funzionare il mulino Energia potenziale: Un corpo che si trova ad una certa altezza è in grado di compiere lavoro a mezzo del suo peso durante la caduta Es: l’acqua di un fiume che scende a valle perde la sua energia potenziale che può essere convertita in energia elettrica

10
Le variabili importanti
(g) la gravità (v) la velocità (COM) centro di massa del corpo (l) lunghezza dell’arto inferiore (EC) energia cinetica (EP) energia potenziale Il compito motorio
 la gravità. (v) la velocità. (COM) centro di massa del corpo. (l) lunghezza dell’arto inferiore. (EC) energia cinetica. (EP) energia potenziale. Il compito motorio.")
11
Correre è + dispendioso!
Perché decidiamo di correre anziché decidere di camminare più velocemente? I vincoli meccanici non ce lo permettono! Se camminando aumentiamo la velocità a 2.5 m s-1 dobbiamo correre

13
Le variabili importanti
(g) la gravità (v) la velocità (COM) centro di massa del corpo (l) lunghezza dell’arto inferiore (EC) energia cinetica (EP) energia potenziale Il compito motorio
 la gravità. (v) la velocità. (COM) centro di massa del corpo. (l) lunghezza dell’arto inferiore. (EC) energia cinetica. (EP) energia potenziale. Il compito motorio.")
14
L’analisi dimensionale
Importanti variabili: Velocità, accelerazione della gravità, altezza

15
Il cambio fra camminata e corsa
Ad una certa velocità che è scalata sui parametri corporei passiamo dalla camminata alla corsa. I bambini cambiano pattern a velocità inferiori Così le persone piccole Che cosa fanno i maratoneti? Quali sono i vincoli principalmente coinvolti?

16
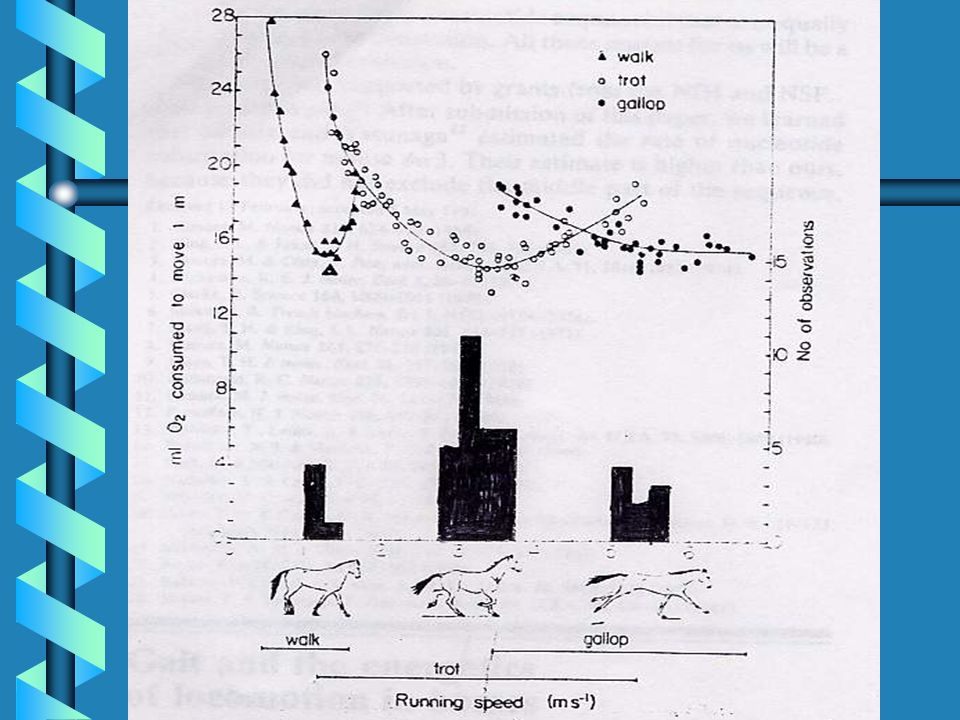
Camminata e vincoli energetici
Il cambio fra un pattern di movimento ed un altro è definito da vincoli anche energetici L’energia minima consumata è relativa alla velocità ed al pattern scelto Hoyt & Taylor (Nature, 1981)
")
18
Implicazioni teoriche
Abbiamo trovato un altro parametro scalato sul movimento Questo parametro è definito quasi unicamente da vincoli meccanici ed energetici Non risultano quindi preponderanti i vincoli percettivi ed ambientali

19
Salire le scale: rapporto scalare con le dimensioni corporee e le capacità motorie
Warren (1987): Lscalino/Lgamba Kontzac et al. (1992): anziani non seguono lo stesso rapporto scalare Bambini?
: Lscalino/Lgamba. Kontzac et al. (1992): anziani non seguono lo stesso rapporto scalare. Bambini")
20
Domanda della ricerca Esiste una relazione stabile nello scegliere e nel salire il gradino più alto che tenga conto dei parametri corporei e delle capacità motorie?

21
Possibili variabili da considerare:
Altezza gamba Altezza scalino Distanza dallo scalino Ipotenusa l Angolo

22
L’angolo è una costante percettivo-motoria
Il rapporto fra l’altezza salita e l’ipotenusa è fortemente lineare (R2=0.97) quindi il valore della linea è da considerare costante quindi costante è l’angolo
 quindi il valore della linea è da considerare costante quindi costante è l’angolo ")
23
Come calcolare l’angolo
L’inclinazione Della retta: Altezza/Ipotenusa sen=A/I

24
Adulti anziani restano fortemente vincolati anche quando gli scalini sono più bassi del loro massimo

25
Giovani adulti e bambini sono meno vincolati e quindi scelgono angoli diversi con scalini più bassi del loro massimo

26
Gli adulti anziani presentano una minor flessibilità sia attiva che passiva

27
Parametri scalati e non

Presentazioni simili









 o la caloria (cal).>")







![Il lavoro [L]=[F][L]=[ML-2T -2] S.I.: 1 Joule = 1 m2 kg s-2](/2/583996/big_thumb.jpg "Il lavoro [L]=[F][L]=[ML-2T -2] S.I.: 1 Joule = 1 m2 kg s-2>")

