Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Applicazioni nel campo dellingegneria dellapprossimazione di funzioni mediante sistemi fuzzy Arianna Mencattini Riunione Annuale del GRUPPO ELETTRONICA (GE 2002) TRIESTE, 3-8 giugno 2002
 TRIESTE, 3-8 giugno 2002")
2
Indice: Introduzione allapprossimazione di funzioni. Introduzione ai sistemi fuzzy come approssimatori di funzioni. Applicazione nel caso SISO: progetto di un DDS. Sistemi MISO: introduzione e confronti. Sistemi MISO: teoremi fondamentali. Applicazione nel caso MISO: modellizzazione di dispositivi. Conclusioni e sviluppi.

3
Lapprossimazione di funzioni mediante sistemi fuzzy Approssimazione di funzioni Progettazione di un sistema fuzzy con certe caratteristiche Utilizzo di sistemi fuzzy Approssimazione di funzioni mediante sistemi fuzzy

4
Sistemi fuzzy e sistemi neurali Rispetto ai sistemi neurali i sistemi fuzzy presentano i seguenti vantaggi: Il sistema è facilmente implementabile (SW/HW) I sistemi fuzzy sono più robusti. La fase di apprendimento è delicata e lunga nei sistemi neurali

5
Date certe caratteristiche di una funzione target f(x) trovare una funzione F(x), che rispetto a questa minimizzi una certa norma. Cosa significa approssimare una funzione Si può inoltre imporre che la funzione F(x) goda di ulteriori caratteristiche, come la continuità delle derivate.
 goda di ulteriori caratteristiche, come la continuità delle derivate..")
6
Perché approssimare una funzione? Caso 1) La funzione target può essere nota, ma difficile da implementare Es. f(x)=log(tan(x)) Occorre utilizzare una Look Up Table, su cui memorizzare i campioni della funzione target. Oppure si deve costruire una funzione approssimante in cui siano presenti solo operatori elementari.
 La funzione target può essere nota, ma difficile da implementare Es. f(x)=log(tan(x)) Occorre utilizzare una Look Up Table, su cui memorizzare i campioni della funzione target. Oppure si deve costruire una funzione approssimante in cui siano presenti solo operatori elementari..")
7
x f(x) y0y0 x f'(x) 0 Es. La funzione target può essere nota, ma non gode di caratteristiche di regolarità Perché approssimare una funzione? Caso 2)
.")
8
Può essere utile costruire unaltra funzione approssimante che goda di proprietà di regolarità. Funzione non regolare Funzione regolare

9
Della funzione f(x) si conoscono alcuni campioni. 1 2 A 1 A 2 A 3 A 4 b 1 b 2 b 3 b 4 P 1 P 2 P 3 P 4 Si può costruire una funzione approssimante di tipo piecewise linear Perché approssimare una funzione? Caso 3)
.")
10
Voglio che un certo sistema fuzzy implementi una funzione che passi per alcuni campioni dati mantenendo caratteristiche di regolarità. PW non linear PW linear 1 2 A 1 A 2 A 3 A 4 b 1 b 2 b 3 b 4 P 1 P 2 P 3 P 4

11
Sistemi fuzzy non normalizzati NNFS 1) In letteratura si sono sempre usati sistemi fuzzy normalizzati (NFS). Utilizzando sistemi fuzzy non normalizzati (NNFS) ho ulteriori parametri su cui agire per : Migliorare lapprossimazione. Imporre le derivate continue in certi punti. k1k1 k2k2 MFs x
 ho ulteriori parametri su cui agire per : Migliorare lapprossimazione. Imporre le derivate continue in certi punti. k1k1 k2k2 MFs x.")
12
NNFS 2) Se k i k i+1 F i (x) è una funzione razionale Se k i = k i+1 F i (x) è una funzione polinomiale
 Se k i k i+1 F i (x) è una funzione razionale Se k i = k i+1 F i (x) è una funzione polinomiale")
13
Sistema fuzzy Esempio 1: progetto di un DDS Schema di un DDS

14
Approssimazione di una funzione modificata = =

15
Fourier coefficients for the fuzzy approximation

16
Spettro della sinusoide fuzzy

17
Risultati e confronti MethodSFDR Uncompressed memory-81.76 dBc Modified Sunderland architecture -73.59 dBc Modified Nicholas architecture -74.56 dBc Taylor series approximation-73.28 dBc CORDIC algorithm-73.32 dBc NNFS approximation-81.60 dBc

18
Sistemi di tipo SISO vs. MISO 1) (single input multiple output vs. multiple input multiple output) Un sistema con più ingressi presenta già da un punto di vista analitico alcune importanti differenze La metodolgia delluso di MFs ad altezze variabili non può essere più usata per imporre la continuità delle derivate.
 Un sistema con più ingressi presenta già da un punto di vista analitico alcune importanti differenze La metodolgia delluso di MFs ad altezze variabili non può essere più usata per imporre la continuità delle derivate..")
19
Sistemi di tipo SISO vs.MISO 1) (single input multiple output vs. multiple input multiple output) 1 2 A 1 A 2 A 3 A 4 b 1 b 2 b 3 b 4 P 1 P 2 P 3 P 4 1 2 k 1 k 2 k 3 k 4 Parametri liberi = n Punti di discontinuità = n E possibile imporre la continuità delle derivate attraverso le altezze k i in modo diretto.
 1 2 A 1 A 2 A 3 A 4 b 1 b 2 b 3 b 4 P 1 P 2 P 3 P k 1 k 2 k 3 k 4 Parametri liberi = n Punti di discontinuità = n E possibile imporre la continuità delle derivate attraverso le altezze k i in modo diretto..")
20
Parametri liberi = n+m Punti di discontinuità = Sistemi di tipo SISO vs.MISO 1) (single input multiple output vs. multiple input multiple output) y x kiki k i+1 sjsj s j+1 x y j i i+1 wjwj w j+1 v i+1 vivi AiAi BjBj B j+1 A i+1 z Non si può imporre la continuità delle derivate attraverso le altezze k e s in modo diretto.
 y x kiki k i+1 sjsj s j+1 x y j i i+1 wjwj w j+1 v i+1 vivi AiAi BjBj B j+1 A i+1 z Non si può imporre la continuità delle derivate attraverso le altezze k e s in modo diretto..")
21
Esempio: funzione target

22
Funzione fuzzy bilineare con MFs triangolari Linee di discontinuità delle derivate parziali

23
Funzione fuzzy con MFs cubiche

24
Sistemi di tipo SISO vs.MISO 2) (single input multiple output vs. multiple input multiple output) Per imporre la continuità delle derivate occorre soddisfare le ipotesi del seguente per garantire che in Ossia si ha che le funzioni sono continue per ogni Teorema 1: Data la funzione fuzzy con input MFs in è sufficiente che.
 Per imporre la continuità delle derivate occorre soddisfare le ipotesi del seguente per garantire che in Ossia si ha che le funzioni sono continue per ogni Teorema 1: Data la funzione fuzzy con input MFs in è sufficiente che..")
25
Significato del Teorema 1 v i (x) v i+1 (x) v' i ( i ) = v' i ( i+1 ) v' i+1 ( i+1 ) = v' i+1 ( i ) i i+1 k k i x 0 MFs di ingresso per la variabile x, =1 Condizione sulle derivate prime
 v i+1 (x) v i ( i ) = v i ( i+1 ) v i+1 ( i+1 ) = v i+1 ( i ) i i+1 k k i x 0 MFs di ingresso per la variabile x, =1 Condizione sulle derivate prime")
26
Significato del Teorema 1 i i+1 k k i x v i (x)v (x) 0 v' i ( i+1 ) v' i+1 ( i ) v' i ( i ) v' i+1 ( i+1 ) MFs di ingresso per la variabile x, =2
v (x) 0 v i ( i+1 ) v i+1 ( i ) v i ( i ) v i+1 ( i+1 ) MFs di ingresso per la variabile x, =2")
27
Aspetto della funzione fuzzy 3D dove sono detti polinomi di Sugeno di ordine N, nelle due variabili x e y.

28
Sistemi di tipo SISO vs.MISO 2) Per imporre i valori delle derivate occorre soddisfare le ipotesi del seguente una volta garantito che in con i polinomi di Sugeno e con input MFs scegliendoli come segue. in i valori delle derivate parzialiallora si ha che possono essere fissati attraverso i soli coefficienti Teorema 2: Data la funzione fuzzy

29
Significato del Teorema 2 00.10.20.30.40.50.60.70.80.91 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1

30
Significato del Teorema 2 00.10.20.30.40.50.60.70.80.91 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1

31
Sommario dei Teoremi1-2 Utilizzo di MFs polinomiali di grado M Continuità delle derivate parziali di ordine M-1 Imposizione dei valori delle derivate della funzione fuzzy di ordine N Utilizzo di Sugeno di ordine N

32
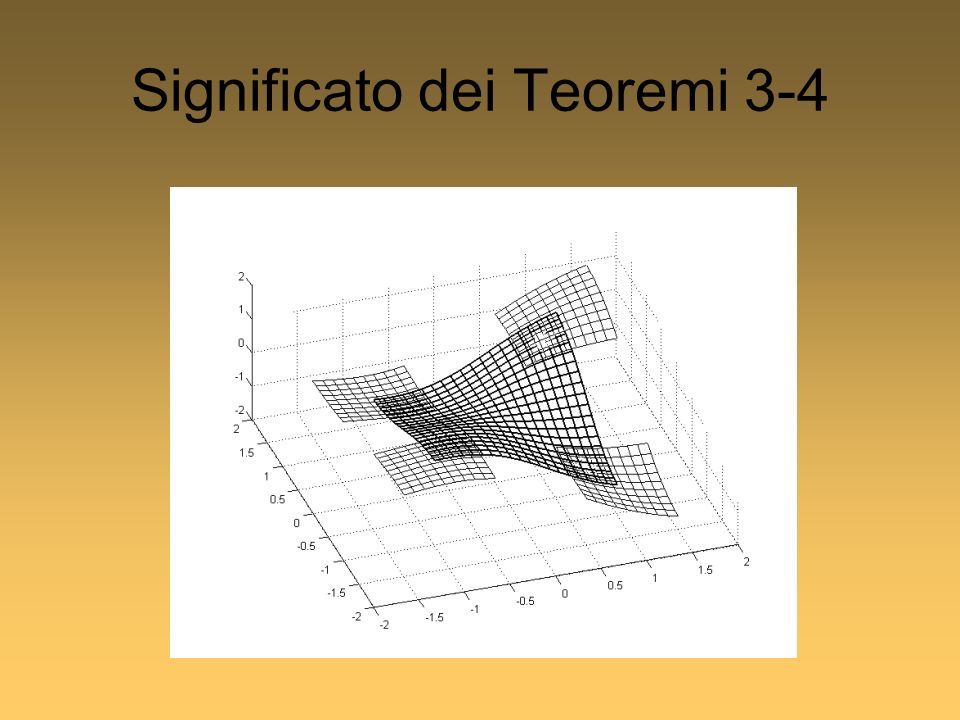
Sistemi di tipo MISO Teorema 3: Data una funzione target polinomiale e data una funzione fuzzy come definita nei precedenti teoremi, questa ultima è in grado di approssimare con errore nullo la funzione polinomiale. (La funzione razionale diventa polinomiale). Teorema 4: Utilizzando risultati del Teorema 2 si ha che i polinomi rappresentano la serie di Taylor di f(x) troncata allN-esimo termine centrata nel punto Teorema 5: La funzione fuzzy risulta essere la combinazione lineare delle serie di Taylor troncate allN-esimo termine, pesata con il prodotto delle funzioni di appartenenza.
. Teorema 4: Utilizzando risultati del Teorema 2 si ha che i polinomi rappresentano la serie di Taylor di f(x) troncata allN-esimo termine centrata nel punto Teorema 5: La funzione fuzzy risulta essere la combinazione lineare delle serie di Taylor troncate allN-esimo termine, pesata con il prodotto delle funzioni di appartenenza..")
33
Significato dei Teoremi 3-4

35
Ottimizzazione del sistema fuzzy: uso delle altezze variabili Le altezze variabili delle MFs possono infine essere usate per migliorare Il comportamento del sistema fuzzy come approssimatore, utilizzando unopportuna norma. Uso dellalgoritmo del gradiente per determinare la configurazione migliore delle n+m altezze allinterno delle n m griglie.

36
Esempio 2: modellizzazione di dispositivi FET Misure sul dispositivo di Ids, gm, gds, Cds, Cgd, Cds Estrazione dei Parametri S Estrazione del circuito equivalente Funzione parametrica di Materka-Kacprzak Costruzione del modello per la simulazione Ottimizzazione dei parametri in base alle misure Modello finale

37
Regolarità della funzione di Materka: problematiche Il modello di Materka non ha nessun legame con la fisica del dispositivo e non gode di proprietà di regolarità nelle derivate seconde. Non è possibile estrarre dal modello informazioni riguardanti il comportamento delle derivate seconde e terze. Il modello non è significativo in questo senso.

38
Introduzione dei sistemi fuzzy nel campo della modellizzazione 1. Come viene approssimata la funzione di Materka da una sistema fuzzy? 2. E possibile migliorare le caratteristiche di regolarità del modello usando un sistema fuzzy?

39
Sistema fuzzy come modello : Ids Materka Fuzzy

40
Sistema fuzzy come modello : gds Materka Fuzzy

41
Sistema fuzzy come modello : gm Materka Fuzzy

42
Dalla funzione target alle misure Nellapplicazione reale si hanno delle misure e non una funzione target A partire dalle misure occorre costruire il modello fuzzy con certe caratteristiche di regolarità. Nascono degli ulteriori problemi

43
Fenomeni dispersivi sulle misure A seconda del punto di polarizzazione le misure effettuate muovendosi attorno al punto di lavoro a bassa frequenza risentono del cambio della temperatura e dei fenomeni di trappola. Quando si vuole simulare il dispositivo ad alta frequenza questi stessi fenomeni non intervengono, perché sono fenomeni con costanti di tempo piccole. Discrepanza fra il modello costruito ed i risultati attesi, perché sono cambiate le condizioni di lavoro dalla fase di simulazione alla fase di misura.

44
Conclusioni I sistemi fuzzy costituiscono una valida alternativa ai sistemi neurali e ad altri sistemi di approssimazione classici. 1. Perché si costruiscono direttamente senza fase di apprendimento. 2. Perché hanno una struttura semplice. 3. Perché si può facilmente imporre al modello fuzzy di godere di determinate caratteristiche di regolarità e di passaggio per punti 4. Perché la fase di ottimizzazione richiede pochi secondi.

45
Sviluppi Modifiche della norma usata nellalgoritmo di ottimizzazione, al fine di minimizzare eventualmente anche gli errori sulle derivate. (Norma di Sobolev) Ottimizzazione della posizione dei punti di intersezione della griglia usata: uso dei Teoremi 3-5 sul legame della funzione fuzzy con la serie di Taylor. Modellizzazione: implementazione di un algoritmo che elimini il contributo dispersivo dalle misure utilizzate per costruire il modello fuzzy. Modellizzazione: estrazione di informazioni riguardanti le derivate parziali seconde e terze della Ids dal modello fuzzy del dispositivo. DDS: valutazione delle prestazioni del DDS in termini di area, consumo di potenza e frequenza massima raggiungibile.
 Ottimizzazione della posizione dei punti di intersezione della griglia usata: uso dei Teoremi 3-5 sul legame della funzione fuzzy con la serie di Taylor. Modellizzazione: implementazione di un algoritmo che elimini il contributo dispersivo dalle misure utilizzate per costruire il modello fuzzy. Modellizzazione: estrazione di informazioni riguardanti le derivate parziali seconde e terze della Ids dal modello fuzzy del dispositivo. DDS: valutazione delle prestazioni del DDS in termini di area, consumo di potenza e frequenza massima raggiungibile..")
Presentazioni simili

 Laurea Magistrale in Informatica Reti 2 (2006/07) dott. Federico Paoloni>")




![FUNZIONI DI GRUPPO Le funzioni di gruppo operano su un set di record restituendo un risultato per il gruppo. AVG ([DISTINCT|ALL] n) media, ignora i valori.](/2/608750/big_thumb.jpg "FUNZIONI DI GRUPPO Le funzioni di gruppo operano su un set di record restituendo un risultato per il gruppo. AVG ([DISTINCT|ALL] n) media, ignora i valori.>")

 if x == nil or k == x.key return x>")











