Scaricare la presentazione
1
Strumentazione Dipartimento di Informatica e Sistemistica
Dott. Ing. VINCENZO SURACI ANNO ACCADEMICO Corso di AUTOMAZIONE 1 (Lezione del Prof. ALESSANDRO DE CARLI)
")
2
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
STRUTTURA DEL NUCLEO TEMATICO: CLASSIFICAZIONE DELLE MODALITÀ DI CONTROLLO INFLUENZA DEI DISTURBI E DEGLI INGRESSI 2

3
DALLA PROGETTAZIONE ALLA REALIZZAZIONE
STRUTTURA DI UN SISTEMA CONTROLLATO COMPLESSO SISTEMA DA CONTROLLARE STRUMENTAZIONE MODALITÀ DI CONTROLLO 3

4
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
CLASSIFICAZIONE DELLE MODALITÀ DI CONTROLLO IN FUNZIONE DELLE VARIABILI 4

5
POSSIBILI SCENARI A LIVELLO DI CAMPO
MODALITÀ DI CONTROLLO POSSIBILI SCENARI A LIVELLO DI CAMPO APPARECCHIATURA CON EGUALE NUMERO DI VARIABILI DI FORZAMENTO E DI VARIABILI CONTROLLATE VARIABILI DI FORZAMENTO VARIABILI CONTROLLATE OGNI VARIABILE DI FORZAMENTO MODIFICA UNA SOLA VARIABILE CONTROLLATA STRUTTURA DI UN SISTEMA SOVRADIMENSIONATO 5

6
SINGLE INPUT SINGLE OUTPUT
MODALITÀ DI CONTROLLO CONTROLLO SISO SINGLE INPUT SINGLE OUTPUT u1 y1 G1(s) u2 y2 G2(s) u… y… G…(s) un yn Gn(s) CONTROLLO LOCALE A CATENA APERTA CONTROLLO LOCALE A CONTROREAZIONE CON REGOLATORE STANDARD EFFETTO DEL SOVRADIMENSIONAMENTO I FINI DEL CONTROLLO 6
 u2. y2. G2(s) u… y… G…(s) un. yn. Gn(s) CONTROLLO LOCALE A CATENA APERTA. CONTROLLO LOCALE A CONTROREAZIONE. CON REGOLATORE STANDARD. EFFETTO DEL SOVRADIMENSIONAMENTO I FINI DEL CONTROLLO. 6.")
7
SINGLE INPUT SINGLE OUTPUT
MODALITÀ DI CONTROLLO CONTROLLO SISO SINGLE INPUT SINGLE OUTPUT G11(s) u1 y1 + G21 (s) G12(s) + G22(s) u2 y2 INTERAZIONI DINAMICHE DI LIMITATA ENTITÀ FRA VARIABILI DI FORZAMENTO E VARIABILI CONTROLLATE STRUTTURA DI UN SISTEMA SOVR. COMPLESSO CON INTERAZIONI 7
 u1. y1. + G21 (s) G12(s) + G22(s) u2. y2. INTERAZIONI DINAMICHE DI LIMITATA ENTITÀ FRA VARIABILI DI FORZAMENTO E VARIABILI CONTROLLATE. STRUTTURA DI UN SISTEMA SOVR. COMPLESSO CON INTERAZIONI. 7.")
8
SINGLE INPUT SINGLE OUTPUT
MODALITÀ DI CONTROLLO CONTROLLO SISO SINGLE INPUT SINGLE OUTPUT DISTURBI STRUTTURALI d1 d2 G21(s) + + G12(s) G11(s) u1 y1 G22(s) u2 y2 CONTROLLO LOCALE A CONTROREAZIONE CON REGOLATORE EVOLUTO MODELLAZIONE DELLE INTERAZIONI COME DISTURBI IN SISTEMI SOVR. 8
 + + G12(s) G11(s) u1. y1. G22(s) u2. y2. CONTROLLO LOCALE A CONTROREAZIONE. CON REGOLATORE EVOLUTO. MODELLAZIONE DELLE INTERAZIONI COME DISTURBI IN SISTEMI SOVR. 8.")
9
MULTIPLE INPUT SINGLE OUTPUT
MODALITÀ DI CONTROLLO CONTROLLO MISO MULTIPLE INPUT SINGLE OUTPUT G1(s) G2(s) + u1 y1 u2 u… y… G…(s) un yn Gn(s) CONTROLLO LOCALE A CONTROREAZIONE CON PREDITTORE CONTROLLO LOCALE CON TECNICHE FUZZY CONTROLLO MULTIPLE INPUT - SINGLE OUTPUT 9
 G2(s) + u1. y1. u2. u… y… G…(s) un. yn. Gn(s) CONTROLLO LOCALE A CONTROREAZIONE CON PREDITTORE. CONTROLLO LOCALE CON TECNICHE FUZZY. CONTROLLO MULTIPLE INPUT - SINGLE OUTPUT. 9.")
10
MULTIPLE INPUT MULTIPLE OUTPUT
MODALITÀ DI CONTROLLO CONTROLLO MIMO MULTIPLE INPUT MULTIPLE OUTPUT OGNI VARIABILE DI FORZAMENTO INFLUENZA IN MANIERA SIGNIFICATIVA PIÙ DI UNA VARIABILE CONTROLLATA VARIABILI DI FORZAMENTO VARIABILI CONTROLLATE STRUTTURA DI UN SISTEMA COMPLESSO MULTIVARIABILE, NON SOVR. 10

11
MULTIPLE INPUT MULTIPLE OUTPUT
MODALITÀ DI CONTROLLO CONTROLLO MIMO MULTIPLE INPUT MULTIPLE OUTPUT DMCQ: QUADRATIC DYNAMIC MATRIX CONTROL IMC: INVERSE MODEL BASED CONTROL VARIABILI DI FORZAMENTO VARIABILI CONTROLLATE GPC: GENERAL PREDICTIVE CONTROL LQC: LINEAR QUADRATIC CONTROL QDMC - IMC - GPC APPLICATI A LIVELLO DI SUPERVISIONE LQC APPLICATO A LIVELLO DI CAMPO MODALITÀ DI CONTROLLO DI UN SISTEMA MULTIVARIABILE 11

12
POSSIBILE SCENARIO A LIVELLO DI GESTIONE
MODALITÀ DI CONTROLLO POSSIBILE SCENARIO A LIVELLO DI GESTIONE OTTIMIZZAZIONE DELLA CONDUZIONE VARIABILI DI GESTIONE VARIABILI DI FORZAMENTO MODALITÀ DI CONTROLLO AL LIVELLO DI GESTIONE 12

13
DIFFUSIONE COSTO MIMO MISO MISO MIMO SISO SISO OTTIMIZZAZIONE
MODALITÀ DI CONTROLLO DIFFUSIONE COSTO DI INGEGNERIZZAZIONE OTTIMIZZAZIONE OTTIMIZZAZIONE MIMO MISO MISO MIMO SISO SISO INDICAZIONI SULLA CONNESSIONE DIFFUSIONE-COSTO 13

14
DELLE CATENE DI CONTROLLO DI UNA CATENA DI CONTROLLO
MODALITÀ DI CONTROLLO NUMERO DELLE CATENE DI CONTROLLO COSTO DI UNA CATENA DI CONTROLLO MULTIPLA REGOLATORE DEDICATO REGOLATORE DEDICATO SINGOLA REGOLATORE P I D REGOLATORE P I D INDICAZIONI SUL COSTO 14

15
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
CLASSIFICAZIONE DELLE MODALITÀ DI CONTROLLO IN FUNZIONE DEL MODELLO DEL SISTEMA DA CONTROLLARE 15

16
MODALITÀ DI CONTROLLO MODALITÀ DI CONTROLLO EURISTICHE legge di controllo progettata in base alla intuizione e alla esperienza ELEMENTARI legge di controllo progettata in base alla conoscenza del modello nella dinamica dominante EVOLUTE legge di controllo progettata in base alla conoscenza del modello nella dinamica dominante e nella dinamica secondaria ROBUSTE legge di controllo progettata in base alla conoscenza del modello nominale e del modello nella dinamica incerta FLESSIBILI legge di controllo progettata in base alla conoscenza del modello nominale e del modello nelle condizioni operative prevedibili CLASSIFICAZIONE DELLE MODALITÀ DI CONTROLLO 16

17
SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO EURISTICHE ELEMENTARI EVOLUTE FLESSIBILI ROBUSTE MODALITÀ DI CONTROLLO SISTEMA DA CONTROLLARE SOVRA DIMENSIONATO CORRETTAMENTE DIFFUSIONE DELLE MODALITÀ DI CONTROLLO 17

18
SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO CONDIZIONI ANOMALE PREVEDIBILI DISTURBI CONDIZIONI NOMINALI SISTEMA DA CONTROLLARE DINAMICA INCERTA DINAMICA SECONDARIA VARIABILE DI FORZAMENTO VARIABILE CONTROLLATA DINAMICA DOMINANTE STATICO APPROSSIMAZIONI NELLA MODELLAZIONE 18

19
VARIABILE CONTROLLATA
MODALITÀ DI CONTROLLO CARATTERIZZAZIONE DEL COMPORTAMENTO DINAMICO DEL SISTEMA DA CONTROLLARE ATTUATORE & SISTEMA DA CONTROLLARE DISTURBI PREVEDIBILI CASUALI VARIABILE DI COMANDO DELL’ATTUATORE VARIABILE CONTROLLATA DINAMICA OSCILLATORIA tempo tempo DINAMICA MOLTO RAPIDA tempo DINAMICA RAPIDA VALUTAZIONE DEL COMPORTAMENTO DINAMICO 19

20
CARATTERIZZAZIONE DEL COMPORTAMENTO DINAMICO
MODALITÀ DI CONTROLLO CARATTERIZZAZIONE DEL COMPORTAMENTO DINAMICO DEL SISTEMA DA CONTROLLARE tempo DINAMICA SMORZATA tempo DINAMICA LENTA DINAMICA MOLTO LENTA tempo tempo DINAMICA INVERSA tempo RITARDO FINITO DT PRESENZA DI UNO ZERO A PARTE REALE POSITIVA VALUTAZIONE DEL COMPORTAMENTO DINAMICO 20

21
MODELLAZIONE DEL SISTEMA DA CONTROLLARE SUDDIVISIONE IN:
MODALITÀ DI CONTROLLO MODELLAZIONE DEL SISTEMA DA CONTROLLARE SUDDIVISIONE IN: - DINAMICA DOMINANTE; - DINAMICA SECONDARIA; - DINAMICA INCERTA. INDIVIDUAZIONE DEI PARAMETRI DINAMICI: - GUADAGNO STATICO; - MODI NATURALI; - COSTANTI DI TEMPO; - PULSAZIONE NATURALE E SMORZAMENTO; - GUADAGNI DI MODO. VERIFICA DELLE PROPRIETÀ STRUTTURALI - STABILITÀ - RAGGIUNGIBILITÀ - OSSERVABILITÀ CARATTERIZZAZIONE DEL MODELLO DINAMICO - OSSERVABILITÀ 21

22
FORMULAZIONE DEL MODELLO
MODALITÀ DI CONTROLLO FORMULAZIONE DEL MODELLO DOMINIO t - EQUAZIONI DIFFERENZIALI STRUTTURA SEMPLICE DEL SISTEMA SISO DOMINIO t - VARIABILI DI STATO STRUTTURA SEMPLICE DEL SISTEMA MISO/MIMO DOMINIO w STRUTTURA COMPLESSA DEL SISTEMA DA CONTROLLARE DOMINIO s FORMULAZIONE ASTRATTA NELLE VARIABILI DI TIPO CONTINUO DOMINIO z FORMULAZIONE ASTRATTA NELLE VARIABILI CAMPIONATE CARATTERIZZAZIONE DEL MODELLO DINAMICO 22

23
INTRODUZIONE E INQUADRAMENTO
MODALITÀ DI CONTROLLO MODELLO DINAMICO NELL’INTORNO DI UNA CONDIZIONE OPERATIVA (PUNTO DI LAVORO) OTTENUTO DALLA LINEARIZZAZIONE NELL'INTORNO DI UN PUNTO DI LAVORO LIMITI DI VALIDITÀ ESCURSIONE MASSIMA DELLE VARIABILI DI FORZAMENTO E DEI DISTURBI COMPATIBILE CON L’AFFIDABILITÀ DEL MODELLO limite di funzionamento variabile di forzamanto controllata variabile limite di validità del modello lineare punto di lavoro Y0 y = f(u) U0 LIMITI DI VALIDITÀ NELL’INTORNO DI UNA CONDIZIONE OPERATIVA 23
 OTTENUTO DALLA LINEARIZZAZIONE NELL INTORNO DI UN PUNTO DI LAVORO. LIMITI DI VALIDITÀ. ESCURSIONE MASSIMA DELLE VARIABILI DI FORZAMENTO E DEI DISTURBI COMPATIBILE CON L’AFFIDABILITÀ DEL MODELLO. limite di funzionamento. variabile di. forzamanto. controllata. variabile. limite di validità del modello lineare. punto di lavoro. Y0. y = f(u) U0. LIMITI DI VALIDITÀ NELL’INTORNO DI UNA CONDIZIONE OPERATIVA. 23.")
24
POSSIBILE COMPORTAMENTO DINAMICO DEL SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO POSSIBILE COMPORTAMENTO DINAMICO DEL SISTEMA DA CONTROLLARE ACCUMULO E TRASFORMAZIONE DELL’ENERGIA IMMESSA O PRELEVATA ACCUMULO DELL’ENERGIA IMMESSA O PRELEVATA CONTROLLATA VARIABILE tempo CONTROLLATA VARIABILE tempo ACCUMULO DELL’ENERGIA IMMESSA O PRELEVATA CON DINAMICA INVERSA CONTROLLATA VARIABILE tempo COMPORTAMENTO DINAMICO DEL SISTEMA DA CONTROLLARE 24

25
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
INFLUENZA DEI DISTURBI NELLA SCELTA DELLE MODALITÀ DI CONTROLLO 25

26
ATTUATORI E SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO D I S T U R B I PREVEDIBILI CASUALI EQUIVALENTI STRUTTURALI VARIABILI DI INTERVENTO VARIABILI DI USCITA ATTUATORI E SISTEMA DA CONTROLLARE VARIABILI DI CONTROLLO VARIABILI CONTROLLATE SCHEMATIZZAZIONE DEL SISTEMA DA CONTROLLARE 26

27
VARIABILE DI CONTROLLO
MODALITÀ DI CONTROLLO DP tempo PREVEDIBILI CASUALI DC tempo DE tempo EQUIVALENTI DS tempo STRUTTURALI tempo YO DY VARIABILE CONTROLLATA UO tempo DU VARIABILE DI CONTROLLO ATTUATORE E SISTEMA DA CONTROLLARE u(t) y(t) UO E YO INDIVIDUANO LE CONDIZIONI OPERATIVE NOMINALI, IN ASSEN-ZA DI DISTURBI. I Dx RAPPRESENTANO I CAMPI DI ESCURSIONE. LA VARIABILE CONTROLLATA y(t) DEVE RIMANERE ENTRO IL CAMPO DI ESCURSIONE YO ± . 5 DY QUANDO AGISCONO I DISTURBI. IL FORZAMENTO u(t) DEVE RIMANERE ENTRO IL CAMPO DI ESCURSIO-NE UO ± . 5 DU . CONDIZIONI OPERATIVE NOMINALI 27
 y(t) UO E YO INDIVIDUANO LE CONDIZIONI OPERATIVE NOMINALI, IN ASSEN-ZA DI DISTURBI. I Dx RAPPRESENTANO I CAMPI DI ESCURSIONE. LA VARIABILE CONTROLLATA y(t) DEVE RIMANERE ENTRO IL CAMPO DI ESCURSIONE YO ± . 5 DY QUANDO AGISCONO I DISTURBI. IL FORZAMENTO u(t) DEVE RIMANERE ENTRO IL CAMPO DI ESCURSIO-NE UO ± . 5 DU . CONDIZIONI OPERATIVE NOMINALI. 27.")
28
YO UO ATTUATORE E SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO PREVEDIBILI dP(t) tempo YO tempo y(t) tempo UO u(t) ATTUATORE E SISTEMA DA CONTROLLARE u(t) y(t) IL SISTEMA DA CONTROLLARE È SOVRADIMENSIONATO QUANDO LA VARIABILE CONTROLLATA y(t) RIMANE ENTRO UN CAMPO DI ESCUR-SIONE YO ± . 5 DYO IN CORRISPONDENZA DI UN DISTURBO PREVEDIBI-LE DI AMPIEZZA .5 DdP , MENTRE LA VARIABILE DI FORZAMENTO RIMANE FISSA A U0. SISTEMA DA CONTROLLARE SOVRADIMENSIONATO 28
 tempo. YO. tempo. y(t) tempo. UO. u(t) ATTUATORE E. SISTEMA DA. CONTROLLARE. u(t) y(t) IL SISTEMA DA CONTROLLARE È SOVRADIMENSIONATO QUANDO LA VARIABILE CONTROLLATA y(t) RIMANE ENTRO UN CAMPO DI ESCUR-SIONE YO ± . 5 DYO IN CORRISPONDENZA DI UN DISTURBO PREVEDIBI-LE DI AMPIEZZA .5 DdP , MENTRE LA VARIABILE DI FORZAMENTO RIMANE FISSA A U0. SISTEMA DA CONTROLLARE SOVRADIMENSIONATO. 28.")
29
ATTUATORE E SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO dP(t) tempo CASUALI EQUIVALENTI YO tempo y(t) UO tempo u(t) ATTUATORE E SISTEMA DA CONTROLLARE u(t) y(t) IN PRESENZA DI DISTURBI CASUALI ED EQUIVALENTI, IL VALORE NO-MINALE YO DELLA VARIABILE CONTROLLATA VIENE RIPRISTINATO AGENDO SULLA VARIABILE DI FORZAMENTO u(t) IL TEMPO DI RIPRISTINO È CONDIZIONATO DALLE DIMENSIONI FISICHE DEL SISTEMA DA CONTROLLARE, DALLA MASSIMA ESCURSIONE DU DELLA VARIABILE DI FORZAMENTO E DALLA MASSIMA SOLLECITAZIO-NE A CUI L’APPARATO PUÒ ESSERE SOTTOPOSTO SISTEMA DA CONTROLLARE SOVRADIMENSIONATO 29
 tempo. CASUALI. EQUIVALENTI. YO. tempo. y(t) UO. tempo. u(t) ATTUATORE E. SISTEMA DA. CONTROLLARE. u(t) y(t) IN PRESENZA DI DISTURBI CASUALI ED EQUIVALENTI, IL VALORE NO-MINALE YO DELLA VARIABILE CONTROLLATA VIENE RIPRISTINATO AGENDO SULLA VARIABILE DI FORZAMENTO u(t) IL TEMPO DI RIPRISTINO È CONDIZIONATO DALLE DIMENSIONI FISICHE DEL SISTEMA DA CONTROLLARE, DALLA MASSIMA ESCURSIONE DU DELLA VARIABILE DI FORZAMENTO E DALLA MASSIMA SOLLECITAZIO-NE A CUI L’APPARATO PUÒ ESSERE SOTTOPOSTO. SISTEMA DA CONTROLLARE SOVRADIMENSIONATO. 29.")
30
ATTUATORE E SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO dP(t) tempo CASUALI EQUIVALENTI tempo UO+ .5 DU u(t) tempo y(t) ATTUATORE E SISTEMA DA CONTROLLARE u(t) y(t) QUANDO IL SISTEMA DA CONTROLLARE È SOVRADIMENSIONATO, IL CAMPO DI ESCURSIONE DELLA VARIABILE DI FORZAMENTO u(t) VA FISSATO IN MODO DA OTTENERE CHE LA VARIABILE CONTROLLATA NON VADA OLTRE SPECIFICA QUANDO I DISTURBI CASUALI ED EQUIVALENTI ASSUMO IL LORO MASSIMO VALORE SISTEMA DA CONTROLLARE SOVRADIMENSIONATO 30
 tempo. CASUALI. EQUIVALENTI. tempo. UO+ .5 DU. u(t) tempo. y(t) ATTUATORE E. SISTEMA DA. CONTROLLARE. u(t) y(t) QUANDO IL SISTEMA DA CONTROLLARE È SOVRADIMENSIONATO, IL CAMPO DI ESCURSIONE DELLA VARIABILE DI FORZAMENTO u(t) VA FISSATO IN MODO DA OTTENERE CHE LA VARIABILE CONTROLLATA NON VADA OLTRE SPECIFICA QUANDO I DISTURBI CASUALI ED EQUIVALENTI ASSUMO IL LORO MASSIMO VALORE. SISTEMA DA CONTROLLARE SOVRADIMENSIONATO. 30.")
31
ATTUATORE E SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO dP(t) tempo STRUTTURALI tempo y(t) tempo UO u(t) ATTUATORE E SISTEMA DA CONTROLLARE u(t) y(t) QUANDO IL SISTEMA DA CONTROLLARE È SOVRADIMENSIONATO, UNA PERTURBAZIONE STRUTTURALE PROVOCA UNA VARIAZIONE TRANSITORIA DELLA VARIABILE CONTROLLATA CHE IN MOLTI CASI RITORNA AD AVERE IL VALORE NOMINALE SE IL DISTURBO STRUT-TURALE RITORNA AD AVERE VALORE NULLO. SISTEMA DA CONTROLLARE SOVRADIMENSIONATO 31
 tempo. STRUTTURALI. tempo. y(t) tempo. UO. u(t) ATTUATORE E. SISTEMA DA. CONTROLLARE. u(t) y(t) QUANDO IL SISTEMA DA CONTROLLARE È SOVRADIMENSIONATO, UNA PERTURBAZIONE STRUTTURALE PROVOCA UNA VARIAZIONE TRANSITORIA DELLA VARIABILE CONTROLLATA CHE IN MOLTI CASI RITORNA AD AVERE IL VALORE NOMINALE SE IL DISTURBO STRUT-TURALE RITORNA AD AVERE VALORE NULLO. SISTEMA DA CONTROLLARE SOVRADIMENSIONATO. 31.")
32
K e-Ts 1 + t s MODALITÀ DI CONTROLLO
y(t) u(t) SISTEMA DA CONTROLLARE SOVRA DIMENSIONATO VARIABILE CONTROLLATA ATTUATORE RITARDO DI TEMPO FINITO u2(t) VARIABILE DI COMANDO DELL’ATTUATORE DISPOSITIVO DI MISURA RITARDO DI TEMPO FINITO MISURA DELLA VARIABILE CONTROLLATA K e-Ts 1 + t s RITARDI FINITI NELLA REALIZZAZIONE DI UN SISTEMA CONTROLLATO 32
 u(t) SISTEMA DA. CONTROLLARE. SOVRA. DIMENSIONATO. VARIABILE. CONTROLLATA. ATTUATORE. RITARDO. DI TEMPO FINITO. u2(t) VARIABILE. DI COMANDO. DELL’ATTUATORE. DISPOSITIVO. DI MISURA. RITARDO. DI TEMPO FINITO. MISURA DELLA. VARIABILE. CONTROLLATA. K e-Ts. 1 + t s. RITARDI FINITI NELLA REALIZZAZIONE DI UN SISTEMA CONTROLLATO. 32.")
33
VARIABILE CONTROLLATA
MODALITÀ DI CONTROLLO CARATTERIZZAZIONE DELLE CONDIZIONI OPERATIVE DEL SISTEMA DA CONTROLLARE DISTURBI PREVEDIBILI E CASUALI ATTUATORE & SISTEMA DA CONTROLLARE VARIABILE DI COMANDO DELL’ATTUATORE VARIABILE CONTROLLATA NELL’INTORNO DELLA CONDIZIONE OPERATIVA PREFISSATA INSEGUIMENTO DI CONDIZIONI OPERATIVE VARIABILI DALLO STATO DI QUIETE AD UNA CONDIZIONE OPERATIVA tempo tempo tempo PRESTAZIONI REGIME PERMANENTE REGIME TRANS. & PERMANENTE REGIME TRANSITORIO CONDIZIONI OPERATIVE 33

34
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
INFLUENZA DEGLI INGRESSI SULLA MODALITÀ DI CONTROLLO 34

35
STRUTTURA DI UN SISTEMA CONTROLLATO
MODALITÀ DI CONTROLLO CONDIZIONI OPERATIVE COMANDO DI ATTIVAZIONE DISTURBI PREVEDIBILI CASUALI SISTEMA DI CONTROLLO ANDAMENTO PREFISSATO DELLA VARIABILE CONTROLLATA DISPOSITIVO DI MISURA MODALITÀ CONTROLLO DISTURBI SRUTTURALI ATTUATORE SISTEMA DA CONTROLLARE SISTEMA DA CONTROLLARE STRUTTURA DI UN SISTEMA CONTROLLATO 35

36
ESEMPIO UN SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO CORRENTE DI ALIMENTAZIONE POSIZIONE ANGOLARE DELLA TAVOLA ROTANTE VARIABILE DI CONTROLLO DISTURBO DI COPPIA VARIABILE CONTROLLATA AZIONAMENTO CON COMANDO DI COPPIA ROTORE DEL MOTORE GIUNTO ELASTICO TAVOLA ROTANTE -10 -20 modulo (dB) 10 100 1000 w (rad/sec) .5 t (sec) 1 .5 t (sec) 1 .5 t (sec) 1 .5 t (sec) 1 Dinamica dominante dell’attuatore Comportamento Istantaneo, lineare pulsazione 120 rad/sec smorzamento .02 ESEMPIO UN SISTEMA DA CONTROLLARE 36
 w (rad/sec) .5. t (sec) t (sec) t (sec) t (sec) 1. Dinamica dominante. dell’attuatore. Comportamento. Istantaneo, lineare. pulsazione 120 rad/sec. smorzamento .02. ESEMPIO UN SISTEMA DA CONTROLLARE. 36.")
37
CONTROLLO INDIRETTO DELLA COPPIA
MODALITÀ DI CONTROLLO CORRENTE DI ALIMENTAZIONE POSIZIONE ANGOLARE DELLA TAVOLA ROTANTE VARIABILE DI CONTROLLO DISTURBO DI COPPIA VARIABILE CONTROLLATA AZIONAMENTO CON COMANDO DI COPPIA ROTORE DEL MOTORE GIUNTO ELASTICO TAVOLA ROTANTE MISURA DELLA CORRENTE PER IL CONTROLLO INDIRETTO DELLA COPPIA MISURA DELLA VELOCITÀ PER IL CONTROLLO DELL’AZIONAMENTO MISURA DELLA POSIZIONE PER IL CONTROLLO DELLA MOVIMENTAZIONE VARIABILI INTERNE E VARIABILE CONTOLLATA 37

38
EFFETTO DELL’ELASTICITÀ DELL’ALBERO ELASTICO
MODALITÀ DI CONTROLLO 1 10 100 1000 10000 -40 -30 -20 -10 w [rad/sec] modulo [dB] 1 .8 .6 .4 .2 .1 .2 .3 .4 .5 .6 .7 t (sec) EFFETTO DELL’ELASTICITÀ DELL’ALBERO ELASTICO 38
 EFFETTO DELL’ELASTICITÀ DELL’ALBERO ELASTICO. 38.")
39
RISPOSTA A GRADINO NEL CONTROLLO A CATENA APERTA
MODALITÀ DI CONTROLLO RISPOSTA A GRADINO NEL CONTROLLO A CATENA APERTA .1 .2 .3 .4 .5 .6 .7 .8 1 t (sec) SENZA GENERATORE DEL RIFERIMENTO (SWITCH ON/OFF) .1 .2 .3 .4 .5 .6 .7 .8 1 t (sec) CON GENERATORE DEL RIFERIMENTO A RAMPA LINEARE ANDAMENTO DELLA VARIABILE CONTROLLATA 39
 SENZA GENERATORE. DEL RIFERIMENTO. (SWITCH ON/OFF) t (sec) CON GENERATORE. DEL RIFERIMENTO. A RAMPA LINEARE. ANDAMENTO DELLA VARIABILE CONTROLLATA. 39.")
40
RISPOSTA A GRADINO NEL CONTROLLO A CATENA APERTA
MODALITÀ DI CONTROLLO RISPOSTA A GRADINO NEL CONTROLLO A CATENA APERTA .1 .2 .3 .4 .5 .6 .7 .8 1 t (sec) SENZA GENERATORE DEL RIFERIMENTO .1 .2 .3 .4 .5 .6 .7 .8 1 t (sec) CON GENERATORE DEL RIFERIMENTO FILTRO PASSA-BASSO CON 2 POLI COINCIDENTI ANDAMENTO DELLA VARIABILE CONTROLLATA 40
 SENZA GENERATORE. DEL RIFERIMENTO t (sec) CON GENERATORE. DEL RIFERIMENTO. FILTRO PASSA-BASSO. CON 2 POLI COINCIDENTI. ANDAMENTO DELLA VARIABILE CONTROLLATA. 40.")
41
RISPOSTA A GRADINO NEL CONTROLLO A CATENA APERTA
MODALITÀ DI CONTROLLO RISPOSTA A GRADINO NEL CONTROLLO A CATENA APERTA .1 .2 .3 .4 .5 .6 .7 .8 1 t (sec) SENZA GENERATORE DEL RIFERIMENTO .1 .2 .3 .4 .5 .6 .7 .8 1 t (sec) CON GENERATORE DEL RIFERIMENTO FILTRO DI BESSEL DEL SECONDO ORDINE ANDAMENTO DELLA VARIABILE CONTROLLATA 41
 SENZA GENERATORE. DEL RIFERIMENTO t (sec) CON GENERATORE. DEL RIFERIMENTO. FILTRO DI BESSEL. DEL SECONDO ORDINE. ANDAMENTO DELLA VARIABILE CONTROLLATA. 41.")
42
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
CLASSIFICAZIONE DELLE MODALITÀ DI CONTROLLO IN FUNZIONE DELLA STRUTTURA DEL SISTEMA CONTROLLATO INIZIARE DAQUI !!! 42

43
MODALITÀ DI CONTROLLO:
A CATENA APERTA A CATENA APERTA CON COMPENSAZIONE DEI DISTURBI A CATENA APERTA CON PREDITTORE A CATENA APERTA CON MODELLO NOMINALE INSERITO NEL CONTROLLORE A CONTROREAZIONE PROPORZIONALE ISTANTANEA A CONTROREAZIONE CON COMPENSAZIONE DEI DISTURBI A CONTROREAZIONE CON PREDITTORE A CONTROREAZIONE FUNZIONALE DINAMICA A REAZIONE POSITIVA CARATTERIZZAZIONE DELLE MODALITÀ DI CONTROLLO 43

44
SCELTO DAL COMMITTENTE SCELTO DAL PROGETTISTA
MODALITÀ DI CONTROLLO STRUTTURA DI UN SISTEMA CONTROLLATO SCELTO DAL COMMITTENTE SCELTO DAL PROGETTISTA ASSEGNATO SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE VERIFICA DEL RAGGIUNGIMENTO DELLE FINALITÀ E DELLE PRESTAZIONI DESIDERATE MODALITÀ DI INTERVENTO VALUTAZIONE DEL RISULTATO VARIABILI DI COMANDO FINALITÀ DESIDERATE MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 44

45
SENZA VERIFICA DI VALIDITÀ
MODALITÀ DI CONTROLLO CONTROLLO A CATENA APERTA TRAMITE OPERATORE SENZA VERIFICA DI VALIDITÀ SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE FINALITÀ DESIDERATE MODALITÀ DI INTERVENTO APPLICAZIONE TRAMITE OPERATORE PRESTAZIONI: VIENE APPLICATA L’AZIONE DI INTERVENTO SOLO QUANDO È RICHIESTO E SENZA EFFETTUARE NESSUNA VERIFICA DI VALIDITÀ MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 45

46
CONTROLLO A CATENA APERTA SENZA ALCUNA VERIFICA
MODALITÀ DI CONTROLLO CONTROLLO A CATENA APERTA SENZA ALCUNA VERIFICA TRAMITE UN DISPOSITIVO DI TIPO DEDICATO SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE MODALITÀ DI INTERVENTO APPLICAZIONE DEGLI INTERVENTI PRESTABILITI TRAMITE UN DISPOSITIVO FINALITÀ DESIDERATE PRESTAZIONI: VIENE APPLICATA L’AZIONE DI INTERVENTO SENZA L’INTERVENTO DELL’OPERATORE E SENZA VERIFICA DI VALIDITÀ MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 46

47
CON VERIFICA DI VALIDITÀ
MODALITÀ DI CONTROLLO CONTROLLO A CATENA APERTA TRAMITE OPERATORE CON VERIFICA DI VALIDITÀ SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE FINALITÀ DESIDERATE MODALITÀ DI INTERVENTO APPLICAZIONE TRAMITE OPERATORE VERIFICA DEL RAGGIUNGIMENTO DELLE FINALITÀ E DELLE PRESTAZIONI DESIDERATE PRESTAZIONI: VIENE APPLICATA L’AZIONE DI INTERVENTO PER RAGGIUNGERE LE PRE-STAZIONI DESIDERATE. LA VERIFICA DI VALIDITÀ È EFFETTATA DA OPERATORE MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 47

48
CONTROLLO A CATENA APERTA SENZA ALCUNA VERIFICA
MODALITÀ DI CONTROLLO CONTROLLO A CATENA APERTA SENZA ALCUNA VERIFICA TRAMITE UN DISPOSITIVO DI TIPO DEDICATO SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE MODALITÀ DI INTERVENTO APPLICAZIONE DEGLI INTERVENTI PRESTABILITI TRAMITE UN DISPOSITIVO FINALITÀ DESIDERATE VERIFICA DEL RAGGIUNGIMENTO DELLE FINALITÀ E DELLE PRESTAZIONI DESIDERATE PRESTAZIONI: VIENE APPLICATA L’AZIONE DI INTERVENTO PER RAGGIUNGERE LE PRE-STAZIONI DESIDERATE. LA VERIFICA DI VALIDITÀ È EFFETTATA DA OPERATORE MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 48

49
CONTROLLO A CATENA CHIUSA TRAMITE DISPOSITIVI ON/OFF
MODALITÀ DI CONTROLLO CONTROLLO A CATENA CHIUSA TRAMITE DISPOSITIVI ON/OFF CON VERIFICA DI VALIDITÀ DI TIPO ON/OFF SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE VERIFICA DEL RAGGIUNGIMENTO DELLE FINALITÀ E DELLE PRESTAZIONI DESIDERATE TRAMITE SENSORE ON/OFF MODALITÀ DI INTERVENTO ON/OFF VALUTAZIONE DEL RISULTATO VARIABILI DI RIFERIMENTO FINALITÀ DESIDERATE ESEMPI CANCELLI ASCENSORI PRESTAZIONI: VIENE APPLICATA UN’AZIONE DI INTERVENTO DI TIPO ON/OFF CON VERIFICA DI TIPO ON/OFF DEL RAGGIUNGIMENTO DELLE FINALITÀ DESIDERATE MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 49

50
CONTROLLO A CATENA CHIUSA TRAMITE ATTUATORE ON/OFF
MODALITÀ DI CONTROLLO CONTROLLO A CATENA CHIUSA TRAMITE ATTUATORE ON/OFF CON VERIFICA DI VALIDITÀ DI TIPO CONTINUO SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE VERIFICA DEL RAGGIUNGIMENTO DELLE FINALITÀ E DELLE PRESTAZIONI DESIDERATE TRAMITE TRASDUTTOTRI MODALITÀ DI INTERVENTO ON/OFF CONFRONTO FRA LE FINALITÀ DESIDERATE E QUELLE OTTENUTE VARIABILI DI RIFERIMENTO + - FINALITÀ DESIDERATE ESEMPI CALDAIA SCALDINO PRESTAZIONI: VIENE APPLICATA UN’AZIONE DI INTERVENTO DI TIPO ON/OFF CON VERIFICA DI TIPO CONTINUO DEL RAGGIUNGIMENTO DELLE FINALITÀ E DELLE PRESTAZIONI DESIDERATE MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 50

51
CONTROLLO A CATENA CHIUSA TRAMITE ATTUARE ON/OFF
MODALITÀ DI CONTROLLO CONTROLLO A CATENA CHIUSA TRAMITE ATTUARE ON/OFF CON VERIFICA DI VALIDITÀ DI TIPO CONTINUO ED ATTIVAZIONE DELLA PULSE WIDTH MODULATION SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE VARIABILI DI RIFERIMENTO FINALITÀ DESIDERATE CONFRONTO FRA LE FINALITÀ DESIDERATE E QUELLE OTTENUTE PULSE WIDTH MODULAZION + - PWM MODALITÀ DI INTERVENTO ON/OFF VERIFICA DEL RAGGIUNGIMENTO DELLE FINALITÀ E DELLE PRESTAZIONI DESIDERATE TRAMITE TRASDUTTOTRI ESEMPI UPS INVERTER PRESTAZIONI: ATTUATORE DI TIPO ON/OFF CON ELABORAZIONE DI TIPO P W M CON VERIFICA DI TIPO CONTINUO DEL RAGGIUNGIMENTO DELLE FINALITÀ E DELLE PRESTAZIONI DESIDERATE MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 51

52
CONTROLLO A CATENA CHIUSA TRAMITE DISPOSITIVI DI TIPO CONTINUO
MODALITÀ DI CONTROLLO CONTROLLO A CATENA CHIUSA TRAMITE DISPOSITIVI DI TIPO CONTINUO CON VERIFICA DI VALIDITÀ DI TIPO CONTINUO SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE VERIFICA DEL RAGGIUNGIMENTO DELLE FINALITÀ E DELLE PRESTAZIONI DESIDERATE TRAMITE TRASDUTTOTRI MODALITÀ DI INTERVENTO DI TIPO CONTINUO CONFRONTO FRA LE FINALITÀ DESIDERATE E QUELLE OTTENUTE VARIABILI DI RIFERIMENTO + - FINALITÀ DESIDERATE ESEMPI REGOLATORI PID O DEDICATI PRESTAZIONI: VIENE APPLICATA UN’AZIONE DI INTERVENTO DI TIPO CONTINUO CON VERIFICA DI TIPO CONTINUO DEL RAGGIUNGIMENTO DELLE PRESTAZIONI DESIDERATE MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 52

53
CONTROLLO A CATENA CHIUSA TRAMITE DISPOSITIVI DI TIPO CONTINUO
MODALITÀ DI CONTROLLO CONTROLLO A CATENA CHIUSA TRAMITE DISPOSITIVI DI TIPO CONTINUO CON VERIFICA DI VALIDITÀ DI TIPO CONTINUO VARIABILI DI RIFERIMENTO FINALITÀ DESIDERATE SISTEMA DA CONTROLLARE VARIABILI DI FORZAMENTO DISTURBI VARIABILI CONTROLLATE + - azione di controllo di tipo statico azione di controllo di tipo dinamico in grado di ottenere tramite la modalità di controllo scostamento: nullo fra l’andamento di tipo costante delle variabili di riferimento e quello delle variabili controllate; minimo fra l’andamento delle variabili di riferimento e quello delle variabili controllate. PRESTAZIONI: INSEGUIRE L’ANDAMENTO DELLA VARIABILE DI RIFERIMENTO CON MINIMO SCOSTAMENTO DELLA VARIABILE CONTROLLATA MODALITÀ DI CONTROLLO E SISTEMA DA CONTROLLARE 53

54
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
MODALITÀ DI CONTROLLO A CATENA APERTA 54

55
SISTEMA DA CONTROLLARE
MODALITÀ DI CONTROLLO CONTROLLO LOCALE A CATENA APERTA CONTROLLORE QUADRO DI COMANDO DI UN APPARATO O DI UN IMPIANTO ANDAMENTO DESIDERATO DELLA VARIABILE CONTROLLATA COMANDO DI AVVIAMENTO O FERMATA DISTURBI PREVEDIBILI DISPOSITIVO DI MISURA VARIABILE MISURATA RUMORE DISTURBI CASUALI VARIABILE DI CONTROLLO ALIMENTAZIONE IN POTENZA ATTUATORE VARIABILE CONTROLLATA VARIABILE DI FORZAMENTO SISTEMA DA CONTROLLARE CONTROLLO LOCALE A CATENA APERTA 55

56
CONTROLLO LOCALE A CATENA APERTA
MODALITÀ DI CONTROLLO CONTROLLO LOCALE A CATENA APERTA CON COMPENSAZIONE DIRETTA DEI DISTURBI QUADRO DI COMANDO DI UN APPARATO O DI UN IMPIANTO ANDAMENTO DESIDERATO DELLA VARIABILE CONTROLLATA COMANDO DI AVVIAMENTO O FERMATA CONTROLLORE DISPOSITIVO DI MISURA VARIABILE MISURATA RUMORE DI CONTROLLO ATTUATORE CONTROLLATA VARIABILE DI FORZAMENTO SISTEMA DA CONTROLLARE DISTURBI PREVEDIBILI CASUALI MISURA DEI DISTURBI E CALCOLO DELLA COMPENSAZIONE DELL’EFFETTO SULLA VARIABILE CONTROLLATA + CONTROLLO A CATENA APERTA CON COMPENSAZIONE DEI DISTURBI 56

57
CONTROLLO LOCALE A CATENA APERTA CON STIMA DELLA DERIVATA
MODALITÀ DI CONTROLLO CONTROLLO LOCALE A CATENA APERTA CON STIMA DELLA DERIVATA QUADRO DI COMANDO DI UN APPARATO O DI UN IMPIANTO ANDAMENTO DESIDERATO DELLA VARIABILE CONTROLLATA COMANDO DI AVVIAMENTO O FERMATA CONTROLLORE DISPOSITIVO DI MISURA VARIABILE MISURATA RUMORE DI CONTROLLO ATTUATORE CONTROLLATA VARIABILE DI FORZAMENTO SISTEMA DA CONTROLLARE DISTURBI PREVEDIBILI CASUALI CALCOLO DELLA DERIVATA DELL’ANDAMENTO DELLA VARIABILE CONTROLLATA + CONTROLLO A CATENA APERTA CON PREDITTORE 57

58
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
MODALITÀ DI CONTROLLO A CONTROREAZIONE 58

59
CONTROLLO LOCALE A CONTROREAZIONE
MODALITÀ DI CONTROLLO CONTROLLO LOCALE A CONTROREAZIONE SCHEMA DI BASE QUADRO DI COMANDO DI UN APPARATO O DI UN IMPIANTO COMANDO DI AVVIAMENTO O FERMATA ANDAMENTO PREFISSATO DEL VALORE ISTANTANEO DELLA VARIABILE CONTROLLATA DISTURBI CASUALI VALORE PREFISSATO DELLA VARIABILE CONTROLLATA DISTURBI PREVEDIBILI VARIABILE CONTROLLATA VALORE MISURATO DELLA VARIABILE CONTROLLATA CONTROLLORE DISPOSITIVO DI ELABORAZIONE DELLA LEGGE DI CONTROLLO ATTUATORE E SISTEMA DA CONTROLLARE DISPOSITIVO DI MISURA + CONTROLLO LOCALE A CONTROREAZIONE ISTANTAEA 59

60
CONTROLLORE CONTROLLO LOCALE A CONTROREAZIONE + +
MODALITÀ DI CONTROLLO CONTROLLO LOCALE A CONTROREAZIONE CON COMPESAZIONE DELL’EFFETTO DEI DISTURBI QUADRO DI COMANDO DI UN APPARATO O DI UN IMPIANTO COMANDO DI AVVIAMENTO O FERMATA ANDAMENTO PREFISSATO DEL VALORE ISTANTANEO DELLA VARIABILE CONTROLLATA ATTUATORE E SISTEMA DA CONTROLLARE DISPOSITIVO DI ELABORAZIONE DELLA LEGGE DI CONTROLLO DISPOSITIVO DI MISURA + DISTURBI PREVEDIBILI CASUALI CONTROLLORE + MISURA DEI DISTURBI E CALCOLO DELLA COMPENSAZIONE DEL LORO EFFETTO AGENDO SULLA VARIABILE DI CONTROLLO DELL’ATTUATORE CONTROLLO A CONTROREAZIONE CON COMPENSAZIONE 60

61
CONTROLLO LOCALE A CONTROREAZIONE CON STIMA DELLA DERIVATA
MODALITÀ DI CONTROLLO CONTROLLO LOCALE A CONTROREAZIONE CON STIMA DELLA DERIVATA QUADRO DI COMANDO DI UN APPARATO O DI UN IMPIANTO COMANDO DI AVVIAMENTO O FERMATA ANDAMENTO PREFISSATO DEL VALORE ISTANTANEO DELLA VARIABILE CONTROLLATA VARIABILE CONTROLLATA DISPOSITIVO DI ELABORAZIONE DELLA LEGGE DI CONTROLLO ATTUATORE SISTEMA DA CONTROLLARE DISPOSITIVO DI MISURA + DISTURBI PREVEDIBILI CASUALI CONTROLLORE + CALCOLO DELLA DERIVATA DELL’ANDAMENTO DESIDERATO DELLA VARIABILE CONTROLLATA CONTROLLO A CONTROREAZIONE CON PREDITTORE 61

62
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
MODALITÀ DI CONTROLLO NEI SISTEMI DI AUTOMAZIONE 62

63
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
ELABORAZIONE DEI DATI E DELLE INFORMAZIONI ESERCIZIO SISTEMA DI PRODUZIONE IMPIANTI APPARATI DISPOSITIVI ELEMENTI SINGOLI ELABORAZIONE DEI DATI E DELLE INFORMAZIONI 63

64
REALIZZAZIONE DI UN SISTEMA DI AUTOMAZIONE
ESERCIZIO PIANIFICAZIONE CONTROLLO MANUALE GESTIONE BASE DI DATI AUTOMATICO SUPERVISIONE BASE DI DATI CONDUZIONE COORDINAMENTO BASE DI DATI S T R U M E N T A Z I O N E ELEMENTI SINGOLI LE AZIONI DI CONTROLLO IN UN SISTEMA CONTROLLATO COMPLESSO 64

65
PROBLEMATICHE D C S D C S D C S EVENTI ESTERNI CONTROLLO
SISTEMA CONTROLLATO COMPLESO GESTIONE DEL SISTEMA GESTIONE VARIABILI DI GESTIONE CALCOLATORE DI PROCESSO CONDUZIONE DEGLI IMPIANTI D C S DISTRIBUTED CONTROL SYSTEM PROGRAMMABLE LOGIC CONTROLLER CALCOLATORE DI PROCESSO VARIABILI DI CONDUZIONE CONTROLLO COORDINAMENTO D C S DISTRIBUTED CONTROL SYSTEM PROGRAMMABLE LOGIC CONTROLLER CALCOLATORE DI PROCESSO VARIABILI DI COMANDO CAMPO D C S DISTRIBUTED CONTROL SYSTEM PROGRAMMABLE LOGIC CONTROLLER CALCOLATORE DI PROCESSO VARIABILI DI CONTROLLO VARIABILI CONTROLLATE IL RUOLO DEL PLC (PROGRAMMABLE LOGIC CONTROLLER) 65
 65.")
66
SISTEMA CONTROLLATO COMPLESSO
CONDIZIONI OPERATIVE PRESCELTE FINALITÀ DEL SISTEMA CONTROLLATO COMPLESSO IMPIANTI DI UNA UNITÀ PRODUTTIVA VARIABILI DI GESTIONE APPARATI DI UN IMPIANTO VARIABILI DI CONDUZIONE COMPONENTI DI UN APPARATO VARIABILI DI COMANDO RILEVAZIONE EVENTI VARIABILI DI ATTIVAZIONE VARIABILI DI INTERVENTO VARIABILI DI CONTROLLO VARIABILI DI INGRESSO AGLI ATTUATORI APPLICATI AI SINGOLI ELEMENTI MISURA DELLE VARIABILI CONTROLLATE E DELLE VARIABILI INTERNE ED ESTERNE COMANDI DI AVVIAMENTO

67
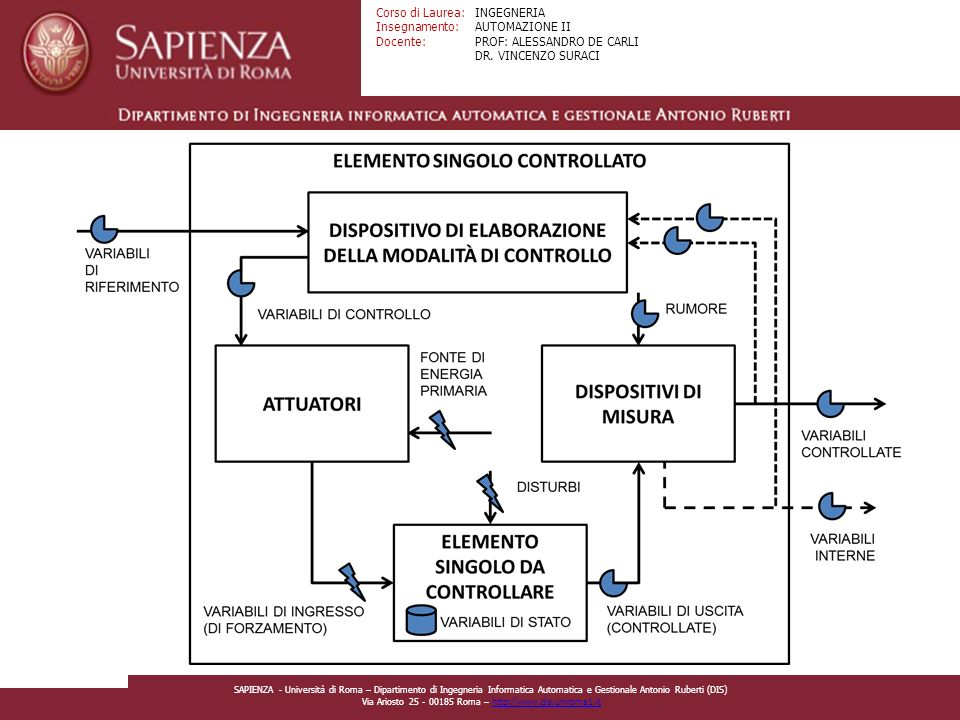
ELEMENTO SINGOLO DA CONTROLLARE ELEMENTO SINGOLO CONTROLLATO
DISTURBI VARIABILI DI INGRESSO ELEMENTO SINGOLO DA CONTROLLARE VARIABILI DI USCITA VARIABILI DI STATO ELEMENTO SINGOLO CONTROLLATO VARIABILI CONTROLLATE VARIABILI DI RIFERIMENTO VARIABILI INTERNE = IMMISSIONE / SOTTRAZIONE DI ENERGIA = ACCUMULO DI ENERGIA = INFORMAZIONE

69
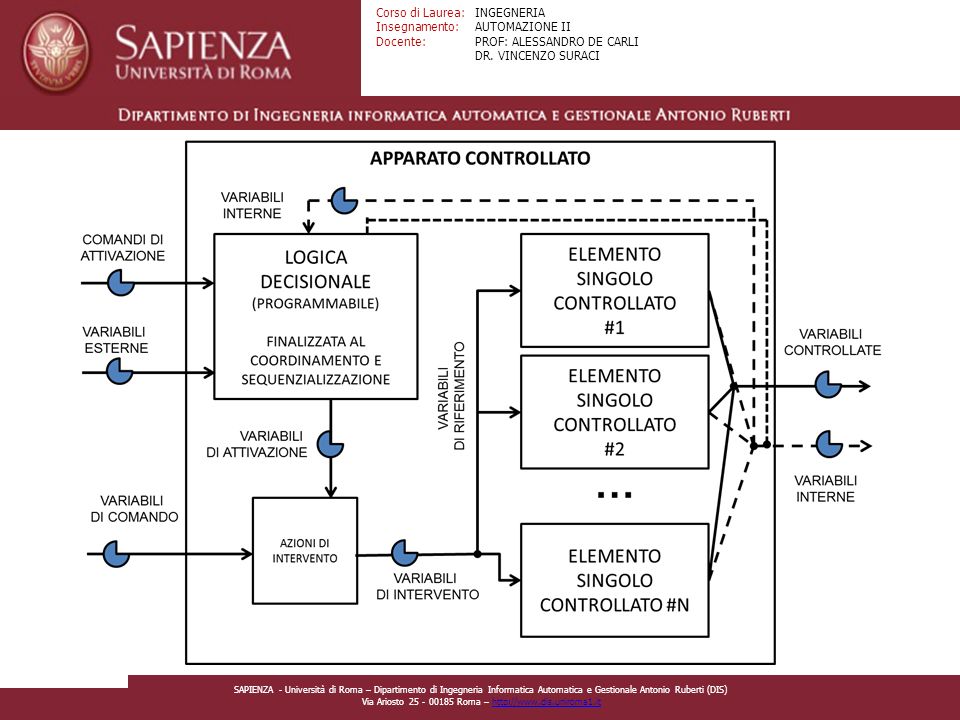
ELEMENTO SINGOLO CONTROLLATO
VARIABILI DI RIFERIMENTO VARIABILI CONTROLLATE COMANDI DI ATTIVAZIONE (o AVVIAMENTO) APPARATO CONTROLLATO VARIABILI DI COMANDO VARIABILI CONTROLLATE VARIABILI INTERNE VARIABILI ESTERNE
 APPARATO. CONTROLLATO. VARIABILI DI COMANDO. VARIABILI CONTROLLATE. VARIABILI INTERNE. VARIABILI ESTERNE.")
71
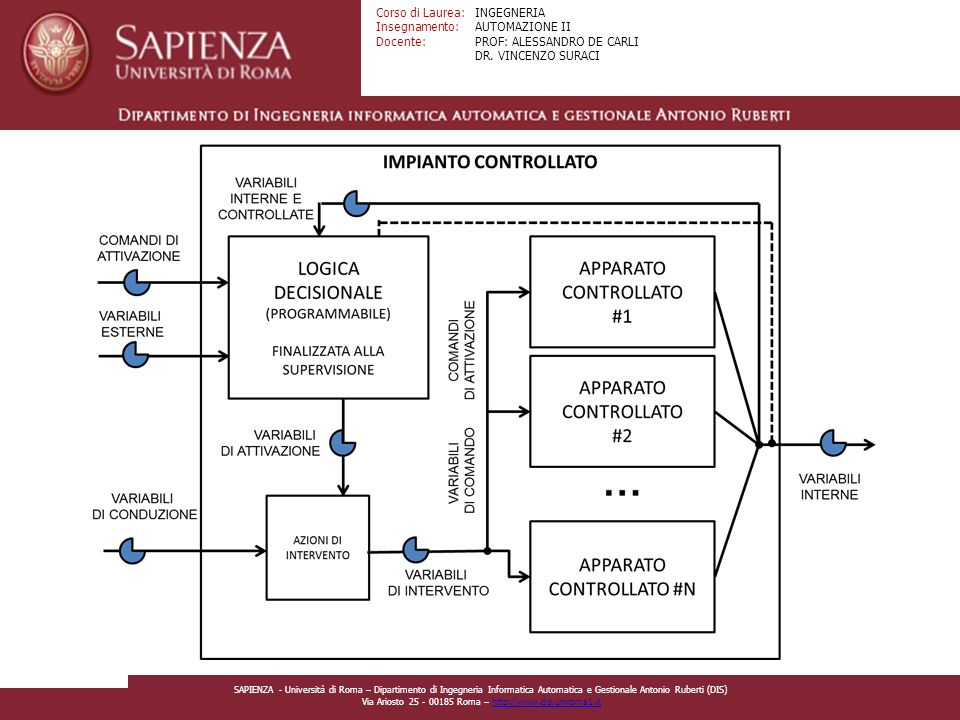
APPARATO CONTROLLATO IMPIANTO CONTROLLATO
VARIABILI DI COMANDO APPARATO CONTROLLATO VARIABILI CONTROLLATE VARIABILI ESTERNE VARIABILI INTERNE COMANDI DI ATTIVAZIONE VARIABILI DI CONDUZIONE IMPIANTO CONTROLLATO VARIABILI INTERNE VARIABILI ESTERNE COMANDI DI ATTIVAZIONE

73
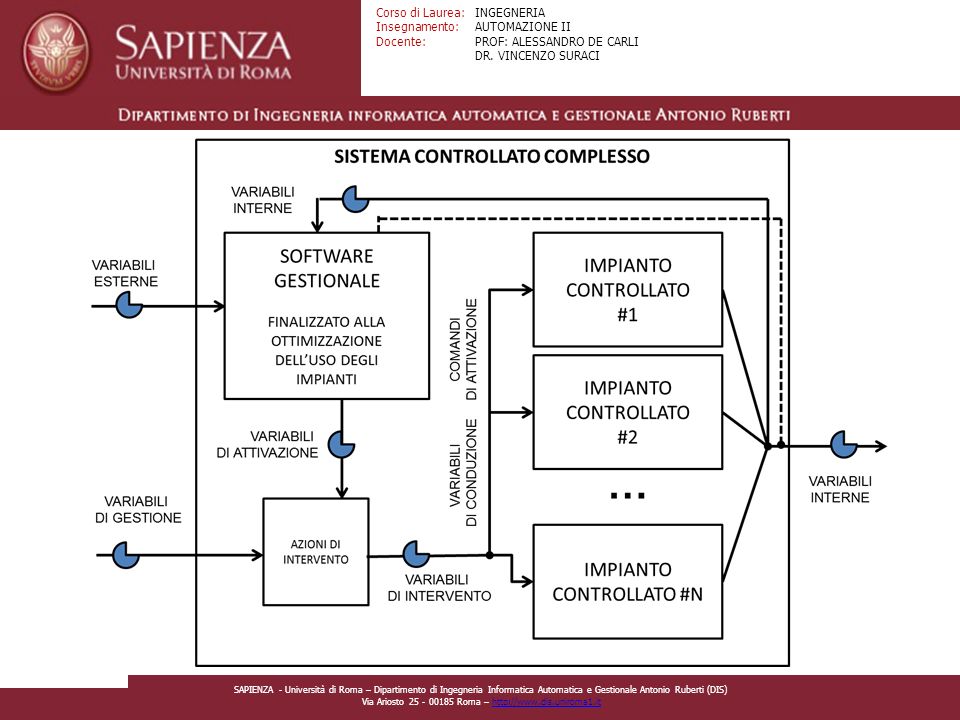
IMPIANTO CONTROLLATO SISTEMA CONTROLLATO COMPLESSO
VARIABILI DI CONDUZIONE IMPIANTO CONTROLLATO VARIABILI INTERNE VARIABILI ESTERNE COMANDI DI ATTIVAZIONE VARIABILI DI GESTIONE SISTEMA CONTROLLATO COMPLESSO VARIABILI INTERNE VARIABILI ESTERNE


















 f(x; q) q Q parametro incognito. Test Statistico: regola che sulla base di un.>")


