Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Intelligenza Artificiale e “Rescue” Dopo il terremoto di Kobe nel 1995 il Giappone ha avviato un programma di ricerca per lo studio di tutte le tecnologie per facilitare il recupero delle vittime in caso di gravi disastri ROBOCUP Rescue

2
Kobe Earthquake (Jan. 17, 1995) Magnitude 7.2 Serious Damage Region 20 x 1 km (13 x 0.6 mi) People seriously effected: 2,300,000 Deaths: 6,432 ++Seriously Injured: 43,800 ++ Buildings Damaged: 530,000 fully destroyed: 104,906, fully burnt: 6,148, half destroyed: 144,272 Fire: 285 large scale: 14 (>10,000m 2 (3600 mi 2 )) Direct Damage: 10 trillion yen (100 billion US$) Kobe, 1995
 Magnitude 7.2 Serious Damage Region 20 x 1 km (13 x 0.6 mi) People seriously effected: 2,300,000 Deaths: 6,432 ++Seriously Injured: 43, Buildings Damaged: 530,000 fully destroyed: 104,906, fully burnt: 6,148, half destroyed: 144,272 Fire: 285 large scale: 14 (>10,000m 2 (3600 mi 2 )) Direct Damage: 10 trillion yen (100 billion US$) Kobe,")
3
Large-Scale Earthquakes Frequency > 3 times/year Large-Scale Earthquake Disasters in 20th Century

4
Survival Rate (FEMA) % Time Survival Rate
 % Time Survival Rate")
5
Motivazioni Difficoltà di comunicazione Mancanza di informazioni sullo scenario Disorganizzazione degli interventi Problemi di instradamento dei soccorsi

6
Obbiettivi Un sistema per –pianificazione dei soccorsi –monitoraggio della situazione Strumenti di ausilio –robot –assistenti digitali

7
Tecniche AI Multi-agent planning Real-time planning Heterogeneous agents Mixed-initiative planning Resource-bounded planning Execution Monitoring Information Fusion

8
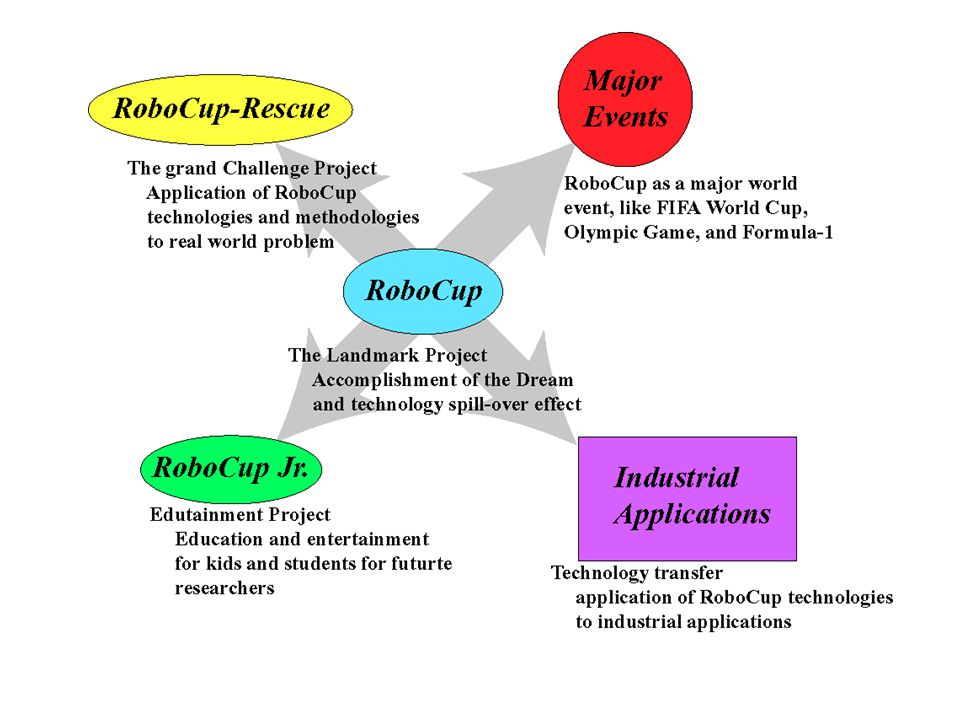
RoboCup An international initiative to promote AI and robotics research using soccer game. Administrated by The RoboCup Federation. Activities: –Robot World Cup Soccer Games –RoboCup-Rescue –RoboCup Jr. –Technical conferences

10
RoboCupRescue: A System Integration Integration with Human using PDA SOLEM, Foster Miller NTT DATA Integration with Robots Integration with Disaster Response Center Phoenix, Hyogo Prefecture Integration with Sensor Network eTec Seismometer, Akashi

11
RoboCup/AAAI Rescue Robot Contest for Real-Size Robotic Systems Seattle: Aug. 2001 Fukuoka: Jun. 2002 Padova: 2003 Kitano, Tadokoro, AI Magazine, 2002

12
RoboCupRescue Simulation 2D log viewer by Kuwata 3D viewer by Shinjoh & Yoshida

13
Current status on rescue research Very weak in disaster rescue simulation.. Almost none. Disaster simulation exists, but not integrated. There are few specific simulation such as fire proliferation, but not integrated with other aspects nor interactive.

14
Rescue vs. Soccer Heterogeneous agentsHomogeneous agents Very large number of11 agents / team agents (> 1,000) Hostile environmentHostile opponent LogisticsReactive teamwork Resource shairngReal-time planning Emergent teamwork
 Hostile environmentHostile opponent LogisticsReactive teamwork Resource shairngReal-time planning Emergent teamwork.")
15
Overall System

16
3D Simulation and Visualization Computer Graphics by the Port Authority Research Center, Ministry of Construction, Government of Japan

17
3D Visualization Agent View Computer Graphics by the Port Authority Research Center, Ministry of Construction, Government of Japan

18
Current Status Large Scale Disaster Simulator available for use in RoboCup Rescue Simulation (2001) RoboCup Rescue Robot Competition (2001) in cooperation with AAAI. Organizing the international conference.

Presentazioni simili



 Massimo Lazzari Dipartimento di Scienze.>")













 The view is completely decoupled from the model such that view and.>")

