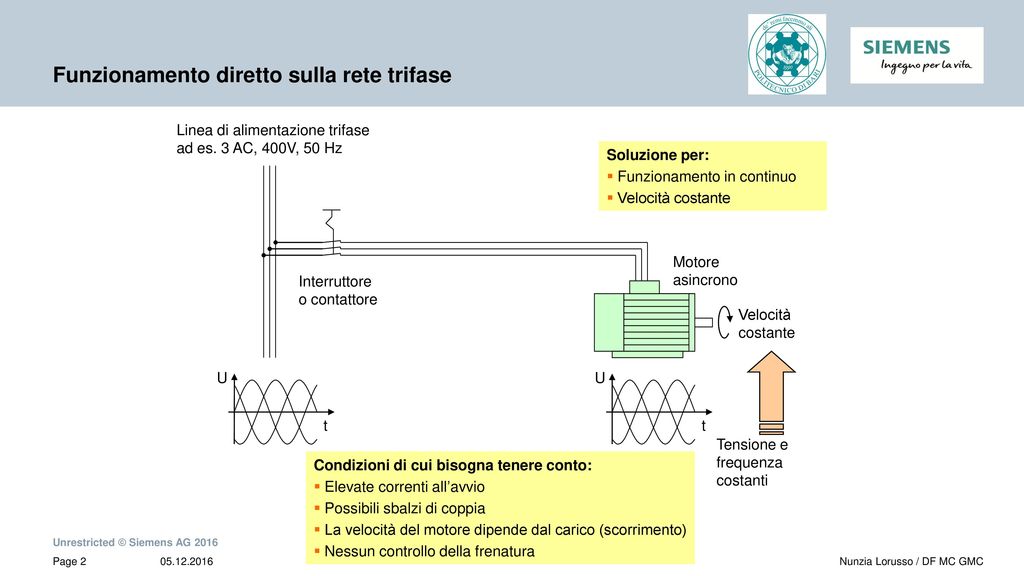
Funzionamento diretto sulla rete trifase Motore asincrono Linea di alimentazione trifase ad es. 3 AC, 400V, 50 Hz Interruttore o contattore Velocità costante Soluzione per: Funzionamento in continuo Velocità costante U t U t Tensione e frequenza costanti Condizioni di cui bisogna tenere conto: Elevate correnti all’avvio Possibili sbalzi di coppia La velocità del motore dipende dal carico (scorrimento) Nessun controllo della frenatura
Funzionamento con Soft Starter Linea di alimentazione trifase ad es. 3 AC, 400V, 50 Hz Soft Starter elettronico Motore asincrono Interruttore o contattore Velocità costante Soft starter U t U t Tensione e frequenza costanti Soluzione per: Velocità costante Riduzione dello stress della meccanica Riduzione della corrente di avvio Condizioni di cui bisogna tenere conto: Possibili sbalzi di coppia La velocità del motore dipende dal carico (scorrimento)
Funzionamento con convertitore di frequenza Linea di alimentazione trifase ad es. 3 AC, 400V, 50 Hz Soluzione per: Regolazione della velocità Avvio e frenatura controllate Risparmio energetico Convertitore di frequenza Motore asincrono Interruttore o contattore Velocità variabile U t U t U t Tensione e frequenza variabili Condizioni di cui bisogna tenere conto: Maggiori costi Miglioramento del processo controllato Minore stress ed usura delle parti meccaniche
Funzionamento con convertitore di frequenza e regolazione precisa della velocità Linea di alimentazione trifase ad es. 3 AC, 400V, 50 Hz Convertitore di frequenza / servodrive Motore asincrono Interruttore o contattore Velocità variabile Encoder Soluzione per: Controllo di velocità preciso Controllo della posizione Condizioni di cui bisogna tenere conto: Aggiunta di un encoder necessaria Posa dei cavi encoder
Funzionamento con convertitore di frequenza per posizionamenti precisi e sincronismi angolari Linea di alimentazione trifase ad es. 3 AC, 400V, 50 Hz Servodrive Motore sincrono Interruttore o contattore Velocità variabile Encoder integrato Soluzione per: Controllo della velocità estremamente preciso Posizionamento preciso e sincronismo angolare nelle macchine da produzione e nelle macchine utensili
Confronto: funzionamento diretto sulla rete o con convertitore
Principio di funzionamento di un convertitore di frequenza Controllo ad anello chiuso Condensatori Raddrizzatore Inverter Motore M U U U t t U t Linea di alimentazione trifase ad es. 3 AC, 400V, 50 Hz Circuito intermedio (DC bus): condensatori con tensione di rete raddrizzata, ca. 1,35 x 400 V = 540 V t Tensione e frequenza varabile
Principio della modulazione a larghezza di impulso (PWM) Il transistor è utilizzato come un interruttore Tensione circuito intermedio Tensione di uscita al motore Corrente motore UDC bus UA IA t t t t t UDC bus UA IA t UDC bus UA IA Frequenza degli impulsi: fimp = 2 …… 16 kHz
Tensione di uscita sinusoidale = Tensione in uscita dal convertitore = Valore medio della tensione Fase U t Fase V t Fase W t
Funzionamento a un quadrante / quattro quadranti Coppia Rotazione anti-oraria Frenatura Singolo quadrante Rotazione oraria Alimentazione Rotazione anti-oraria Alimentazione Rotazione oraria Frenatura Velocità M Flusso di energia nel funzionamento a un quadrante: M Flusso di energia nel funzionamento a 4 quadranti:
Resistenza di frenatura Flusso di energia in alimentazione (= motore): Raddrizzatore Inverter Motore M M Inverter Raddrizzatore Motore Flusso di energia in frenatura (= generatore): Resistenza di frenatura
Unità di conversione/recupero a transistor Inverter lato rete Inverter lato motore Flusso di energia in alimentazione (= motore): Motore M Filtro e reattanza di commutazione M Motore Flusso di energia in frenatura (= generatore): Inverter lato rete lato motore
Tensione sul DC bus Motori in frenatura Motori in accelerazione DC bus non regolato (raddrizzatore a diodi) DC bus a vuoto UDC 570 V 540 V 650 V Soglia di intervento della resistenza di frenatura (se presente) Con la tolleranza del 10% sulla tensione di rete: 540 V - 10% = 490 V t UDC DC bus elevato e stabilizzato a 600 V DC bus regolato (raddrizzatore a transistor/IGBT) t
Sistemi mono e multi asse Connessione DC bus Unità di alimentazione: raddrizzatore a diodi o a transistor M Inverter 3 AC, 400 V Sistema multi asse 1. Sistema mono asse 2. Esempio: sistema avvolgitore/svolgitore 3. Vantaggi del sistema multi asse: Scambio di energia tra i drives (alimentazione/frenatura): Macchine utensili con molti assi Sistemi avvolgitore (motore) e svolgitore (frenatura/generazione) Utilizzo congiunto di componenti del DC-link (resistenze di frenatura, moduli condensatori) Solo una connessione alla rete di alimentazione: minori costi per i componenti lato linea e per la loro installazione
Unità di alimentazione UDC t 600 V costanti Unità di alimentazione regolate (Active) Unità di alimentazione non regolate (Smart) UDC t Motori in accelerazione Motori in frenatura ≈ 570 V (min. 490 V) Unità di alimentazione non regolate (Basic) UDC t Motori in accelerazione Motori in frenatura ≈ 570 V (min. 490 V) IGBTs Tiristori / diodi Elettronica di potenza No Significative Influenza su UDC Funz. 1Q / non regolato Alimentatore Basic Sì Trascurabili Vengono compensate Funz. 2Q / regolato Alimentatore Active Rigenerazione energia in rete Fluttuazioni di linea Componenti armoniche in rete Compensazione pot. reattiva Funz. 2Q / non regolato Modalità operativa Alimentatore Smart Proprietà
Struttura del sistema di controllo per servomotori Blocchi di posizionamento Interpolatore Controllo di posizione Controllo di velocità Controllo di corrente Parte di potenza Motore Encoder sset nset Iset oppure M - sact - nact - Iact Master virtuale e cambio elettronico Valore istantaneo di corrente Valore istantaneo di velocità Valutazione encoder Valore istantaneo di posizione Il regolatore di posizione utilizza il valore istantaneo ed il riferimento di posizione per calcolare il nuovo riferimento di velocità in un suo tempo ciclo (tipicamente da 1 a 4 ms). Per ottenere una buona risposta dinamica, l’anello di controllo della posizione deve essere subordinato ad un anello chiuso di controllo della velocità (con tempo ciclo tipico da 62 a 250 s).
Assi di posizionamento / assi interpolanti 1 asse di posizionamento Blocchi di posizionamento Controllo di posizione Controllo di velocità Controllo di corrente Parte di potenza Interpolatore Sistema di misura Motore sset nset Iset M Blocchi di posizionamento Interpolatore di percorso M Iset nset sset Asse X Asse Y Asse Z 3 assi interpolanti
Dubbi ? Domande ?