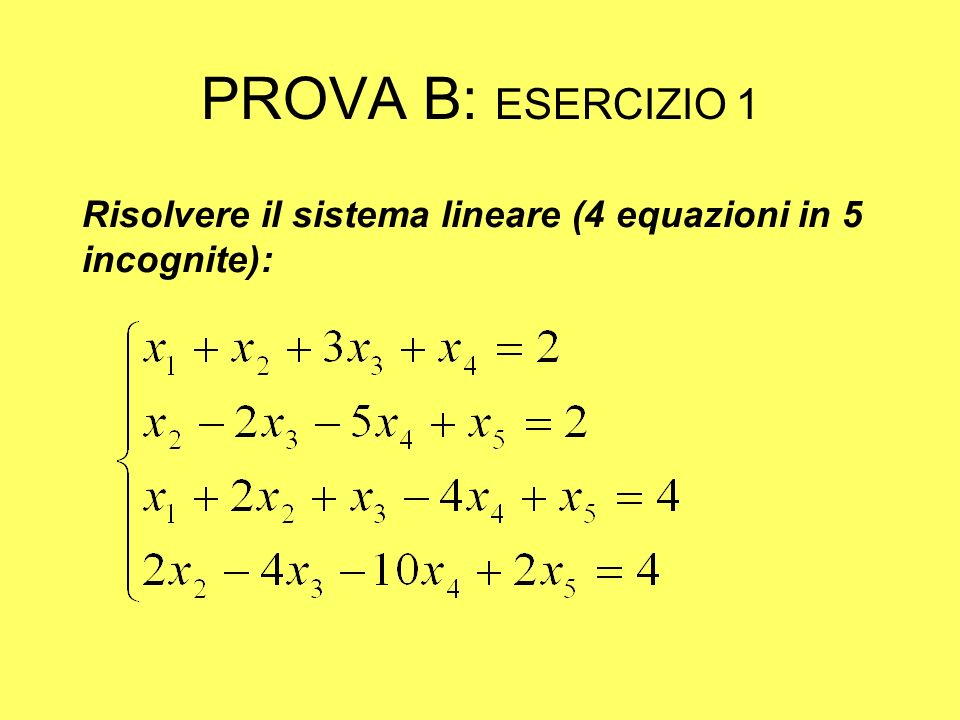
PROVA B: ESERCIZIO 1 Risolvere il sistema lineare (4 equazioni in 5 incognite):
PROVA B: ESERCIZIO 1 La matrice completa ed incompleta hanno rango 2; infatti: La seconda e quarta riga sono proporzionali La terza riga è somma delle prime due righe Inoltre la sottomatrice : Ha il determinante diverso da 0 (è uguale ad 1)
PROVA B: ESERCIZIO 1 Eliminando la terza e la quarta equazione si ottiene il sistema: Portando a secondo membro le incognite, e
PROVA B: ESERCIZIO 1 La matrice inversa della matrice dei coefficienti del sistema ridotto è : Che moltiplicata per il vettore dei termini noti del sistema ridotto
PROVA B: ESERCIZIO 1 Genera la soluzione del sistema ridotto: Per cui la soluzione del sistema iniziale è:
PROVA A : ESERCIZIO 2 Quanti numeri superiori a si possono costruire con le cifre del numero (attenzione: non si possono ripetere le cifre)? Quanti sono dispari? I numeri superiori a possono avere 5 o 6 cifre. Poiché non si possono ripetere le cifre e lordine è importante (nel senso che è un elemento di differenziazione dei gruppi) allora il gruppo di riferimento è rappresentato dalle Disposizioni semplici.
PROVA B : ESERCIZIO 2 La risposta alla domanda a) è quindi: Per quanto riguarda il calcolo del numero dei numeri dispari, si deve tener e presente che lultima cifra deve essere una delle 3 cifre dispari presenti nel numero Si ha quindi:
PROVA B : ESERCIZIO 4 Unazienda sostiene costi fissi pari a e costi variabili unitari pari a 100 fino a 1000 unità prodotte. Il costo variabile unitario per ogni unità prodotta oltre le 1000 è pari a 65. Il prezzo unitario di vendita è pari a 75. Determinare leventuale punto di pareggio tra costi e ricavi.
PROVA B: ESERCIZIO 4 La funzione dei Ricavi totali è: Ovvero: La funzione dei Costi totali è: dove è uguale a 100 per le prime 1000 unità per poi diminuire a 65 per ogni ulteriore unità venduta.
PROVA A: ESERCIZIO 4 Per le prime 1000 unità la funzione dei cOSTi totali assume quindi lespressione: Mentre da 1000 unità in poi assume lespressione:
PROVA A: ESERCIZIO 4 Landamento delle funzioni dei costi totali e dei ricavi totali è:
PROVA A: ESERCIZIO 4 I Costi totali in corrispondenza alla produzione di 1000 unità sono pari a : Mentre Ricavi totali sono pari a: Quindi non ci sono punti di pareggio prima di 1000 unità prodotte/vendute.
PROVA A: ESERCIZIO 4 Il punto di pareggio (la cui esistenza è garantita dal fatto che, pur essendo i costi in 1000 maggiori dei ricavi in 1000, la retta dei costi da 1000 unità in poi ha un coefficiente angolare, 65, inferiore al coefficiente angolare, 75, della retta dei ricavi totali) si ottiene imponendo luguaglianza tra la funzione dei ricavi e quella dei costi
PROVA A: ESERCIZIO 4 Il punto di pareggio ha dunque coordinate e