MOVIMENTAZIONE CONTROLLATA Dipartimento di Informatica e Sistemistica MOVIMENTAZIONE CONTROLLATA MOVIMENTAZIONE MULTIASSE Alessandro DE CARLI Anno Accademico 2006-07
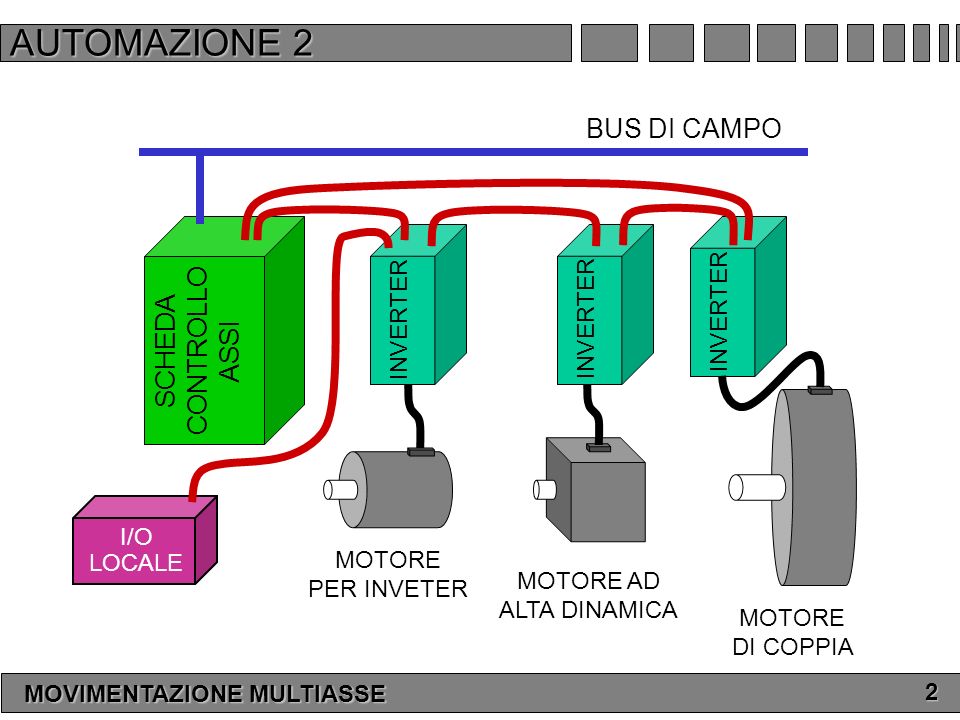
AUTOMAZIONE 2 BUS DI CAMPO CONTROLLO SCHEDA ASSI INVERTER INVERTER LOCALE MOTORE PER INVETER MOTORE AD ALTA DINAMICA MOTORE DI COPPIA MOVIMENTAZIONE MULTIASSE 2
AUTOMAZIONE 2 MOTORE 2 MOTORE 3 MOTORE 1 PER ALZARE E ABBASSARE IL BRACCIO MOTORE 1 PER MUOVERE IL NASTRO TRASPORTATORE MOTORE 3 L’UTENSILE NASTRO TRASPORTATORE CON LAVORAZIONE DEL PEZZO MOVIMENTAZIONE MULTIASSE MOVIMENTAZIONE MULTIASSE 3 3
AUTOMAZIONE 2 MOTORE 3 MOTORE 1 MOTORE 2 TRENO DI LAMINAZIONE PER MUOVERE I VITONI DEI RULLI DI LAMINAZIONE MOTORE 1 PER MUOVERE L’ASPO AVVOGITORE MOTORE 2 PER METTERE IN TIRO IL LAMINATO TRENO DI LAMINAZIONE CON CONTROLLO DIRETTO DEL TIRO MOVIMENTAZIONE MULTIASSE MOVIMENTAZIONE MULTIASSE MOVIMENTAZIONE MULTIASSE 4 4 4
AUTOMAZIONE 2 OBIETTIVO: POSIZIONAMENTO ORIZZONTALE DELL’UTENSILE MOTORE UTENSILE CINGHIA SEMI RIGIDA TELAIO SEMI RIGIDO COPPIA MOTRICE FORZA DI REAZIONE SUL TELAIO SULL’UTENSILE OBIETTIVO: POSIZIONAMENTO ORIZZONTALE DELL’UTENSILE IN TEMPO MINIMO CON LA MASSIMA PRECISIONE VARIABILI DI COMANDO: PROFILO DI VELOCITÀ DEL MOTORE PROFILO DI COPPIA DEL MOTORE MOVIMENTAZIONE MULTIASSE 5